基于多源數據及多維故障診斷空間的快速智能電網故障診斷方案
2022-10-11 01:38:16魏聰聰鄧祥力賈聲昊房劉遠
電測與儀表 2022年10期
魏聰聰,鄧祥力,賈聲昊,房劉遠
(1.上海電力大學 電氣工程學院,上海 200090; 2.江蘇興力建設集團,南京 210000; 3.貴州大學 電氣工程學院,貴陽 550025)
0 引 言
電網發生故障時,監測系統采集到的海量故障警報數據從本地自動裝置上送至調度中心,電網故障診斷需從中快速而準確地發現故障原因,輔助調度運行人員及時進行事故分析與處理,快速恢復供電,保證電網安全、可靠運行。
目前,常用的電網故障診斷方法主要有專家系統[1]、數值計算分析[2]、粗糙集[3]、貝葉斯網絡[4]、人工神經網絡[5]、解析模型[6]、等。文獻[7]提出一種基于模型診斷的電網故障最優診斷的查詢方法。該方法運用貝葉斯理論計算候選診斷的故障概率,并查詢最大概率的候選診斷作為電網故障的最優診斷。文獻[8]通過建立故障連接樹實現了故障時電網拓撲結構和保護知識的表達,在此基礎上運用Petri網對故障知識進行邏輯推理,降低了故障診斷算法的復雜度。然而,在開關量信息誤變位或丟失的情況下,它們會難以處理,即便有修正措施也會出現對診斷結果難以解釋的問題。文獻[9]通過提取各元件的故障錄波不同類型的特征值,通過對這些特征值進行聚類來進行故障類型的劃分。文獻[10]利用廣義差動原理,實現了僅利用故障錄波數據進行差流計算來進行故障元件的定位。文獻[11]綜合利用遙信數據和故障錄波數據,將兩者融合來進行故障診斷,取得了良好效果。然而,由于故障錄波器型號差異、設備老舊等原因,使得調度中心側難以實現對所有故障錄波器接入,在故障監視范圍內也存在盲點。而且,正確性、實時性和全面性是考核在線故障診斷是否能夠滿足調度實用化要求的3個基本指標[12]。所以,即使數據能上傳,時間也在數分鐘級,使得它們在故障診斷的實時性方面存在明顯不足。
針對以上問題,文中從故障診斷的正確性、實時性,兼顧全面性的角度,提出一種基于多源數據及多維故障診斷空間的電網故障診斷方法。該方法首先利用數據采集與監控系統(SCADA)和故障信息系統(FIS)中的開關量信息,將歷史故障信息庫和可預想的各種可能出現的故障情況統一整合,通過本文所提的編碼方案,將每種故障映射成與之相對應的唯一編碼,形成故障編碼集。接著,考慮到僅用開關量作為故障診斷的數據源時,遙信信息有誤報、漏報的可能,并且開關量無法準確識別故障相,文中利用采樣頻率較高的廣域量測系統(WAMS)對其進行修正,從而保證診斷結果的正確性和實時性;同時,利用WAMS采樣電流來判別故障相。然后對故障編碼集打標簽后,將其輸入PNN,構造基于PNN的開關量分類模型。當故障發生時,經電氣量修正后將實際遙信變位信息形成故障編碼,輸入PNN分類器即可得出初步診斷結果。最后經過故障分析模塊,綜合兩個數據源的結果,對保護、斷路器是否正確動作進行分析,得出最終診斷結果。
1 故障編碼集的形成
電網故障后,大量遙信變位數據上傳到調度中心,單個遙信數據信息量少、信息不全面,甚至還會出現差錯。所以,以單個遙信數據為診斷單位難以對電網故障做出全面、正確的診斷。如果對相關遙信數據進行歸類,并映射到故障診斷空間,在故障診斷空間內分析、觀察電網故障,則能夠全面、快速、準確的診斷出故障。不同故障類型的遙信數據通過映射后在故障診斷空間內的分布各不相同,故障空間內的不同點代表了不同的故障類型。通過對故障空間各個點的分類識別,可實現對電網故障的歸類。
1.1 故障編碼數學模型的建立
電網一次設備發生故障,由繼電保護檢測出故障,并跳開故障元件兩端的斷路器,切除故障元件。其設備故障到故障元件切除完整的信號流程為:設備故障->保護動作->斷路器跳閘->重合閘動作->斷路器重合->跳閘保護動作->斷路器->設備停運。
輸電線路故障編碼的數學模型為:
Gk=(qk,pk,ok)
(1)
式中qk為故障過程字段編碼,包含的遙信時序信息為: 保護動作—斷路器跳閘—重合閘動作—斷路器合閘—保護后加速動作—斷路器跳閘;pk為保護動作字段編碼,包含的遙信信息有:故障錄波啟動信號、保護裝置故障信號、PT、CT斷線信號、雙套主保護后備保護及遠跳出口信號;ok為斷路器跳閘字段編碼,包含的遙信信息為:故障發生后以重合閘為時間分界的斷路器各相位置。所以,繼電保護的不同動作行為、不同操作回路的動作行為及斷路器的不同跳合閘狀態決定了Gk的取值。Gk的取值具有唯一性,其值決定了線路的故障類型及二次設備的動作狀態。所以,通過Gk取值的不同,實現對線路故障及二次設備的工作狀態進行歸類,從而實現對各種故障類型的診斷。由于沒有重合閘,母線編碼、變壓器和電容器只有后兩個編碼字段,為2維編碼。其編碼方式與線路類似,只是各個位的具體信號不同。例如,線路主保護動作信號對應的具體遙信一般為光纖差動保護出口,而變壓器主保護動作信號對應的具體遙信為變壓器差動保護出口。
1.2 遙信數據到故障空間的編碼映射
首先對遙信數據字段進行劃分和編碼,然后再映射到多維數據空間,其映射變換為:
(2)
式中A1…An為n個故障后遙信二進制數據矩陣;c1...cn為通過編碼后的故障編碼數據;f1...fn為n個故障編碼映射函數。
通過式(2),即可完成遙信二進制數到n維編碼空間(c1,...,cn)的映射,所以,利用遙信變位數據的故障診斷問題,轉換為多維空間中的樣本數據的歸類問題。為了映射到n維編碼空間,必須確定遙信二進制數據矩陣Ai和故障編碼映射函數fi,即確定遙信二進制數的編碼方式。
(1)遙信二進制數據矩陣數據的確定
編碼的遙信二進制數據矩陣Ai的數據結構如公式(3)所示,其值均為0或1的二進制數,由遙信變位數據確定。其中Dn為編碼所用到的關鍵遙信數據,D1到Dn為編碼不同的位,對應著不同的遙信報警信號,不同編碼字段所對應的遙信也有所差別。如,對于輸電線路的故障過程編碼字段,Dn包括線路差動保護動作、重合閘出口、線路后備距離保護動作、斷路器分位等。保護動作字段編碼,Dn包括輸電線路雙套主保護、雙套后備保護、雙套CT斷線、雙套遠跳保護等。如果發生遙信變位,相應位置的數據為1,沒有發生遙信變位其值為0。
(3)
按照故障后遙信變位數據信息和Ai矩陣的數據結構,確定遙信二進制數據矩陣Ai的數值。
(2)故障編碼映射函數的確定
映射函數采用為遙信二進制數據矩陣分配不同的權重,然后累加求和的方式實現。編碼的映射函數如式(4)所示。
(4)
式中w=(20,...,2n),為二進制權重向量。
二進制數據的權重表示該二進制數據在整個編碼中重要程度,也是用來調整編碼以達到分類目的的工具。比如故障錄波標志位是電網發生故障的必要條件。繼電保護動作和斷路器發生變位時,如果沒有收到故障錄波遙信數據,則可能是變電站內部測試產生的頻發數據,所以故障錄波信號應放首位并且分配更高的二進制權重。并且其取值有信號為0,無信號為1,這樣一來,如果其為1,則此時編碼數值會很大,設為閉鎖診斷程序信號。
1.3 故障空間編碼集的求取
以電網中的一次設備為單位,不同的一次設備會產生不同的遙信變位數據集。每一個二進制遙信數可能有0或1兩種值,所以窮舉每個一次設備故障的遙信狀態數據的組合數目會很大,對應故障診斷空間的點的數目也很大。然而根據繼電保護和操作回路的動作約束,實際可能出現的的遙信組合有限并且可以預想。以故障過程字段編碼為例,其遙信組織方式及編碼過程如表1所示。

表1 故障過程字段編碼
將所有可能遙信組合方式經本方案編碼后,故障過程字段、保護動作字段、斷路器跳閘字段分別有3種、26種、12種編碼,共3×26×12=936組編碼數據。保護動作字段編碼可區分雙套保護裝置的遙信信息,根據各地區的事故記錄習慣不同可靈活設置故障類別,本文以華東某地區的事故記錄習慣設置故障類型。例如,將一套和二套保護動作合并記錄,即將僅有一套主保護動作的編碼和兩套主保護同時動作時的編碼合并為一種故障類型。最終形成的故障類型如表2所示。
各個字段可以分別診斷出不同的內容,通過不同字段診斷出的不同結果的組合,可以診斷出電網一次設備的不同故障類型和故障原因。各字段相互獨立,診斷結果無關,所以最終的診斷結果是各個字段診斷內容的任意組合,共計3×6×4=72種。本方案的編碼庫和種類還可根據各站的實際故障遙信上報情況進行學習、擴充。
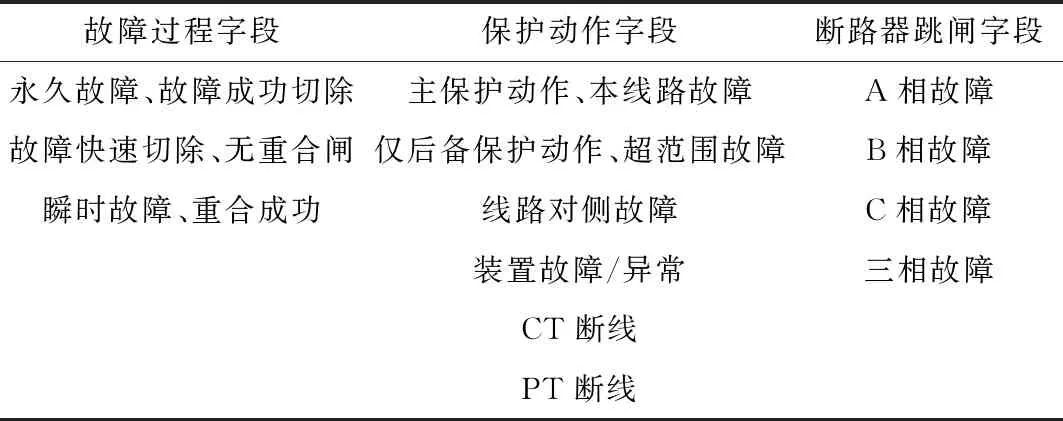
表2 各字段編碼所對應的故障類型
2 WAMS數據對開關量信息的修補
針對開關量可能存在信息畸變,并且無法區分兩相、三相故障的缺陷,提出利用WAMS的電氣量信息對開關量進行修補。
2.1 故障診斷啟動條件
僅由開關量做為數據源的情況下,故障診斷啟動條件一般為故障錄波啟動信號和全站事故總信號,為確保開關量信息的準確性,本文引入電氣量對其進行修正。本文采用經典的電流突變量啟動判據[13],啟動判據定義為:
Δf(t)=||f(t)-f(t-N)|-|f(t-N)-f(t-2N)||>1.25Immax
(5)
其中:
f(t)=
(6)
式中ia(t)、ib(t)、ic(t)分別為 a、b、c 三相電流在t時刻的瞬時值;Immax為正常運行時最大負荷電流的幅值;N為采樣周期。
2.2 斷路器位置的判定
開關量診斷主要用到的遙信信息是斷路器位置信號和保護動作信號。其中保護動作信號一般有冗余系統,并且SCADA、FIS、保護信息子站的信息可以互相修正,的所以其發生畸變的概率不大。而斷路器位置信號由于沒有可參照的信息就行互補修正,所以其畸變的概率相對較大。而一旦其發生畸變,現有故障診斷系統就可能給出錯誤的結果。因此,本文采用WAMS的電氣量信息對其進行修正,從根本上解決畸變問題。
采用IEEE三機九節點模擬正常情況下和A相接地時斷路器拉開后靠近線路端PT的電壓波形如圖1所示。
由圖1可知,斷路器拉開后,由于對地電容的影響,線路端PT所測得的電壓短時間內持續衰減為0,若忽略對地電容影響,實際線路電壓應該在兩端斷路器拉開后瞬間降到0。設斷路器靠近線路一側的PMU所測得的電壓幅值量測量分別為Ua、Ub、Uc,則可建立如下判據:
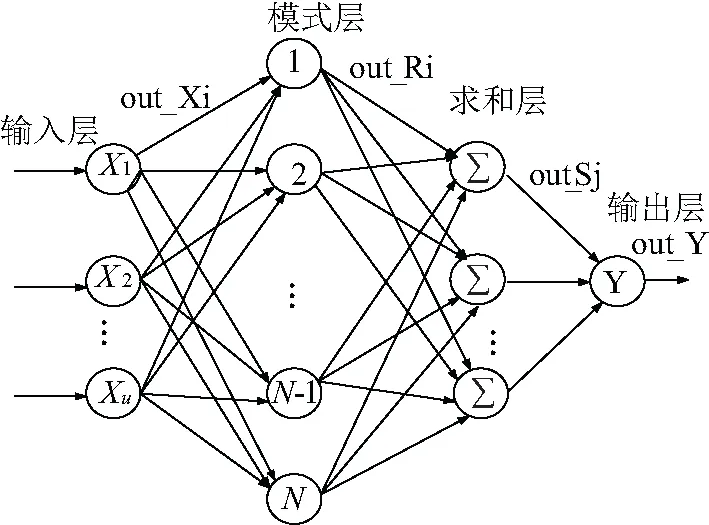
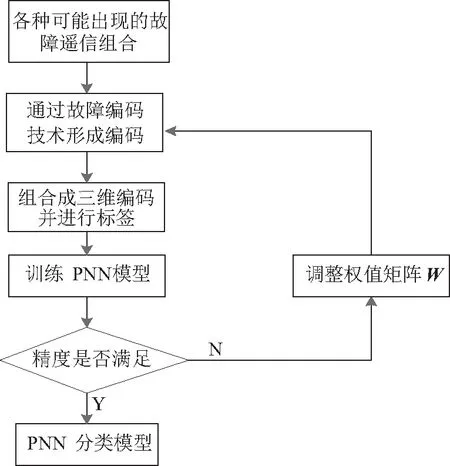
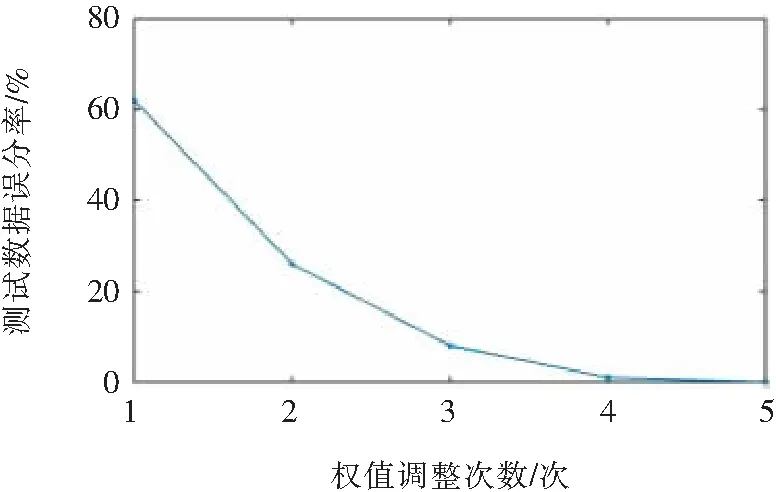
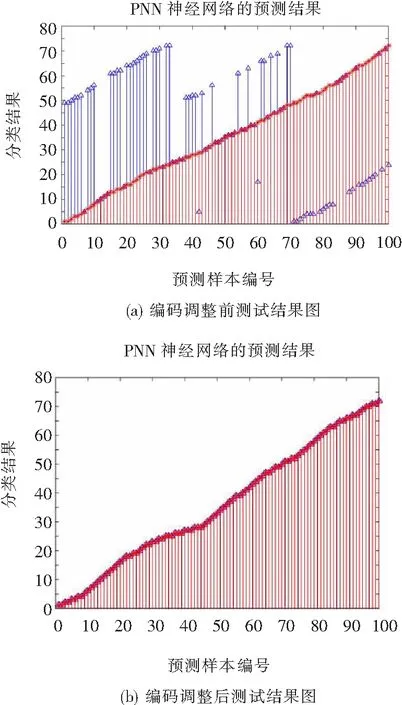
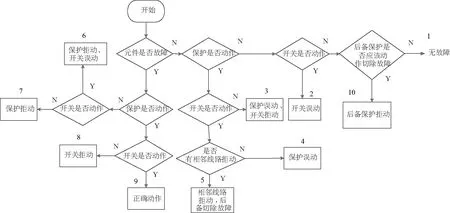
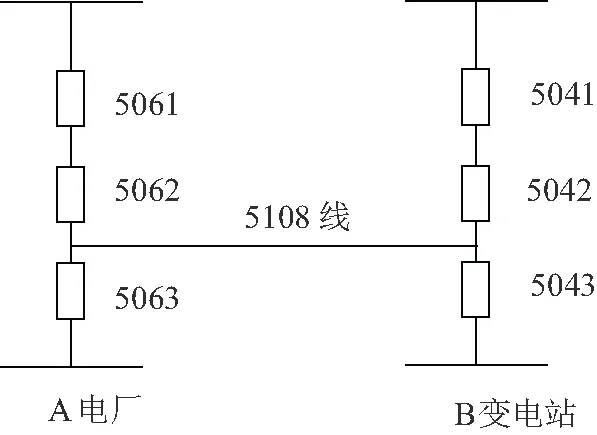
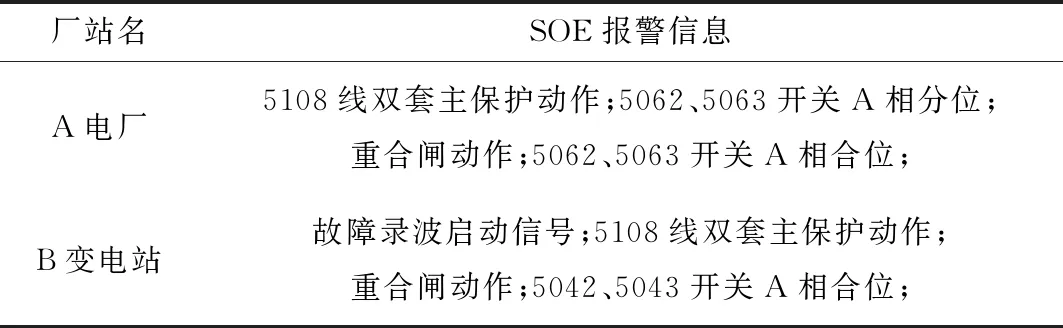
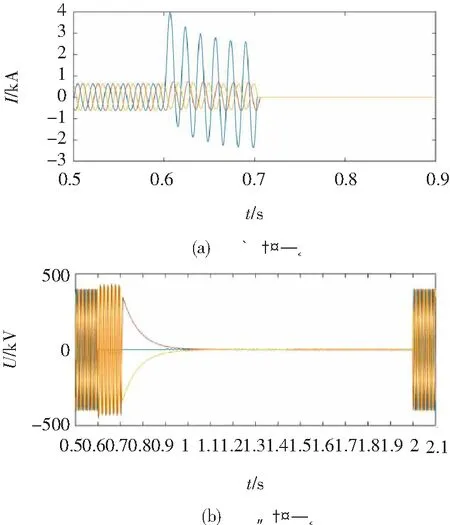
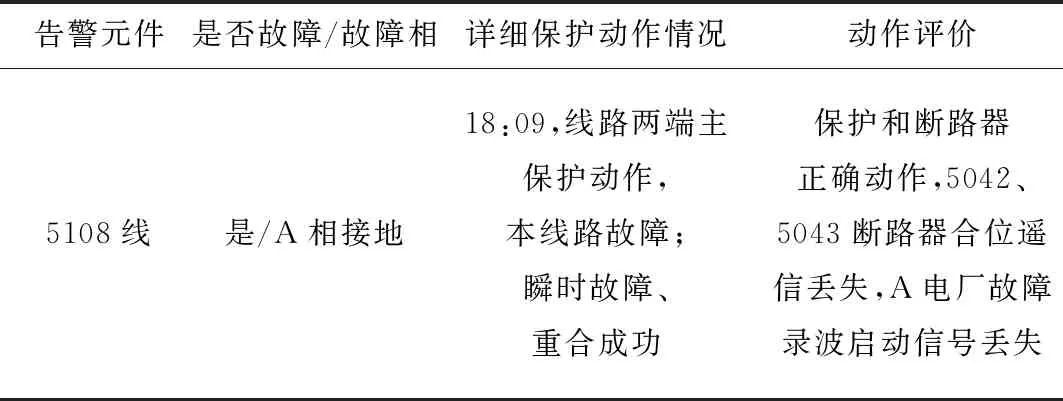
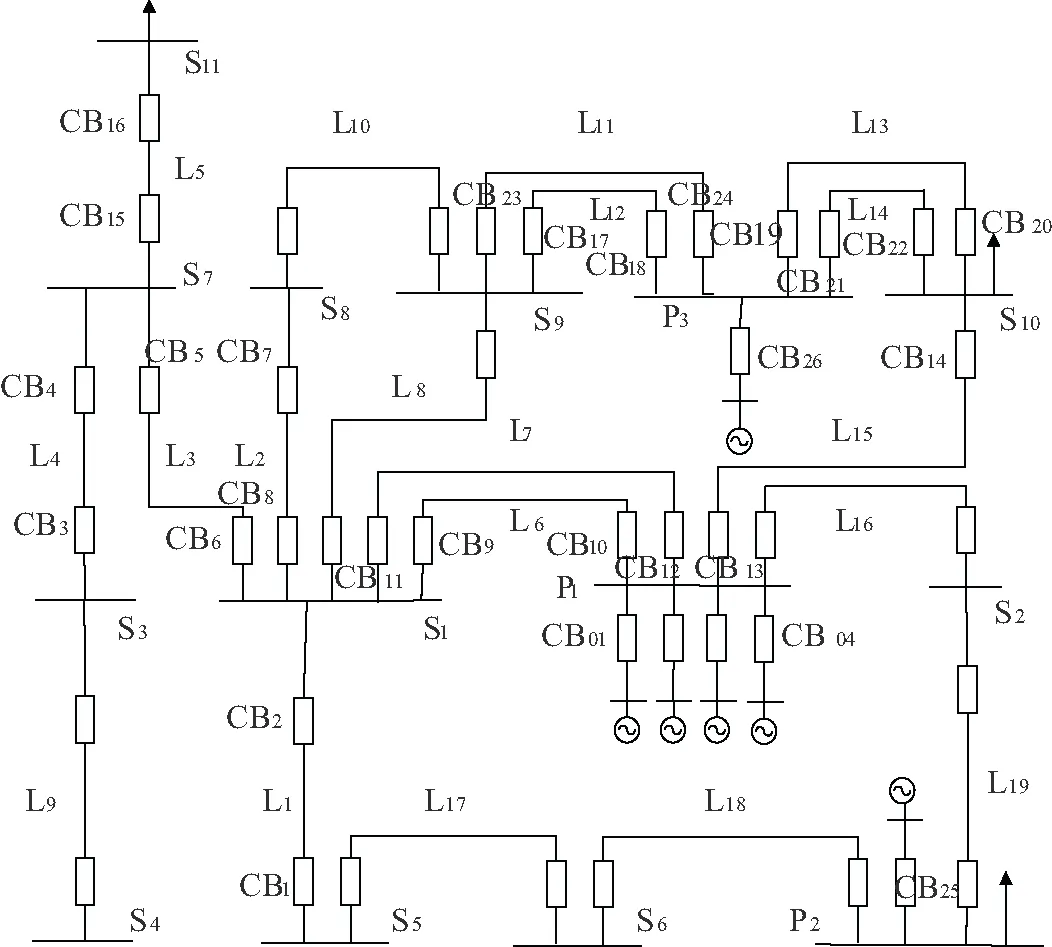
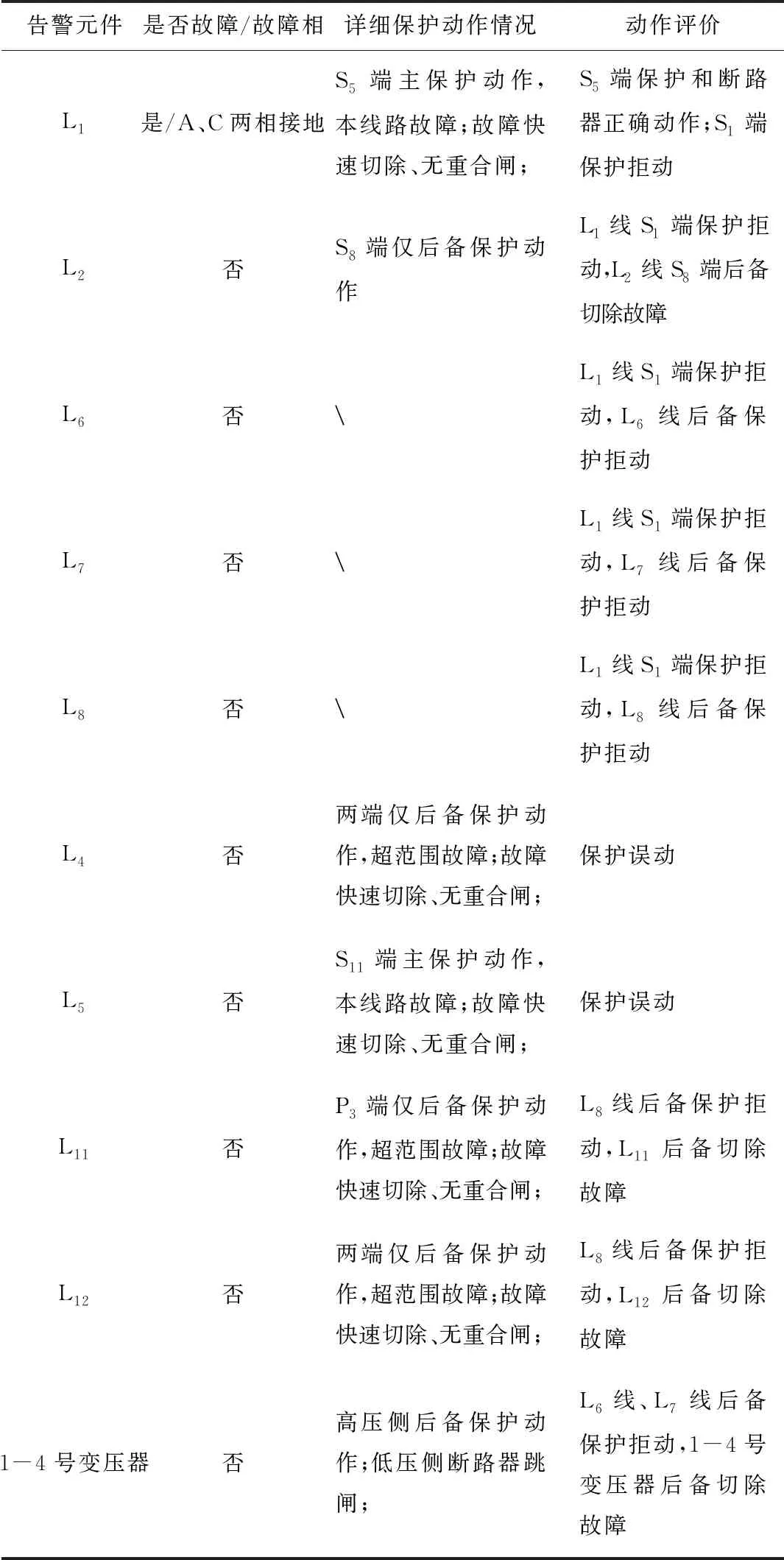
Uφ (7) 式中φ=a,b,c;Uset為電壓閾值,此處設為額定電壓的70%,即Uset=0.7Ue。當三相中任意一相滿足式(7),即判定斷路器為分位。計及保護動作、開關動作和重合閘動作的延時,文中取保護動作或重合閘動作信號100 ms后的一個周波內的電壓數據進行計算。 圖1 斷路器斷開后線路端電壓 針對開關量無法準確識別故障相的缺陷,本文采用文獻[14]中的用WAMS電流進行故障相識別的方法,通過對PMU采樣電流計算得出故障特征編碼,將其依次與A、B、C、D四個特征集進行匹配,得出故障類型。兼顧全面性的同時又保障了故障診斷的實時性,并以此作為元件是否故障的標志。 PNN具有結構簡單,容易設計等優點,廣泛應用于模式分類。其網絡結構如圖2所示。 輸入層包括n個神經元,其個數為輸入樣本的維數;模式層包括N個隱神經元,對應N個訓練樣本;求和層包括m個隱神經元,對應總類別的個數;輸出層輸出求和層神經元中后驗概率最大者所對應的類別。它可由1個神經元組成,輸出輸入樣本所屬類別,也可由m個神經元組成,每個神經元分別對應一種類別。連接求和層神經元中概率最大者輸出為1,其對應的類別即為輸入樣本所屬類別,其余神經元輸出為0。 圖2 PNN網絡結構圖 每層的輸出可由式(8)~式(11)計算得出: out_Xi=XiW (8) (9) (10) out_Y=submax(out_Sj) (11) 其中,n為訓練樣本維度;i=1,2,...,N為樣本個數;X為訓練樣本;W為權值矩陣;Z為待分類的輸入樣本;σ為平滑系數;j=1,2,...,m為樣本種類;v=1,2,...,Li,Li為類別j的訓練樣本數tj為訓練樣本中屬于第j類的樣本個數,sub函數表示取對應的下標。 以1.3節所形成的936組編碼為數據樣本,訓練網絡模型。為體現本方法的容錯性,不以全部故障編碼集作為訓練樣本,而是選其中每類故障的幾個數據作為測試樣本,用以正明只要一種故障經過編碼后落到其對應的編碼域中,即可實現正確診斷。即以其中836組數據作為訓練樣本,其余100組數據作為測試樣本。設PNN的網絡目標輸出向量Y=[1 2……m]T,本文中m=72,即1.3節所得到的72種故障類型。設PNN的輸入矩陣為G,如式(12)所示: (12) 式中G為3×n矩陣,即n個3維編碼Gk,各個編碼的形成方式已在第1章介紹過。 模型訓練流程如圖3所示。首先通過故障編碼技術將遙信轉換為空間編碼,并對各字段編碼進行標簽,然后將三維故障編碼輸入PNN訓練分類模型,精度不達標則調整權值矩陣W,直到達到識別精度,完成訓練模型。 圖3 基于PNN的故障診斷流程圖 在故障診斷空間內,各編碼向量之間的距離越大,容錯能力越強,越容易分類。所以,通過以上準則調整權值矩陣W,改變故障診斷空間中映射編碼值的位置,使得不同種類的各映射編碼值之間的距離盡量大。 調整編碼權值過程中測試數據誤分率如圖4所示,調整前后測試結果對比如圖5所示,其中星號表示標準故障類型,三角表示實際分到的故障類型。由圖可見,根據編碼距離的不同,分類效果也有明顯差別,并且根據多次實驗結果來看,不同種類間距離越大,分類效果越好,最終調整完距離后,可實現分類準確性100%。 圖4 測試數據誤分率 圖5 PNN測試結果圖 故障分析模塊可對保護和斷路器信息畸變、拒動、誤動情況進行分析。其分析流程如圖6所示。 圖6 故障分析流程圖 圖6中從開始框圖隨箭頭方向指向矩形框圖為一條邏輯路徑,共10條路徑已標在圖中。因為斷路器位置信息可由電氣量進行修正,SCADA中的保護動作信息由FIS進行修正,這個過程可以在數據輸入故障分析模塊之前完成,所以此處認為它們的信息是準確的。因此,圖中的元件是否故障以故障相判別程序是否有輸出為準,保護是否動作以是否收到保護動作信息為準,開關是否動作以電氣量修正結果為準。結合下圖故障分析模塊分析出的保護誤動、拒動,開關誤動、拒動等情況,所有的非正常情況均可分析。需指出的是,當發生保護拒動時,需搜索相鄰線路后備保護是否動作切除故障,單獨做一個子程序輸出搜索結果,以供路徑1、路徑4、路徑5、路徑10利用其結果進行邏輯判斷。 本文所提的故障編碼方案,通過調整編碼可以做到包含所有保護和斷路器均正常動作的情況下的故障識別,此時,由開關量診斷程序和電氣量的故障相判斷程序即可得出完整的故障診斷結果。但當發生保護或斷路器誤動、拒動等情況時,開關量診斷程序可能出現無法輸出診斷結果或輸出錯誤結果的情況,此時令開關量診斷程序分字段輸出診斷結果,然后由故障分析模塊分析誤動、拒動情況,綜合輸出最終診斷結果。完整的故障診斷流程如圖7所示。 圖7 基于多源信息的故障診斷流程圖 發生故障時,WAMS可得到各個測點的電壓、電流波形,PMU采樣頻率為1 000 Hz。 算例1。以華東某500 kV線路發生的實際故障為例,故障發生前該線路接線示意圖如圖8所示。 圖8 電網局部接線圖 某日18:09該線路發生A相接地故障后,兩側主保護動作跳開線路A相,然后重合閘動作,重合成功。線路兩側收到的遙信信息如表3所示。故障時,5042、5043開關靠近線路側的PMU記錄的相電壓、電流波形如圖9所示。 表3 線路兩端SOE報警信息 圖9 故障電流、電壓波形 若直接由開關量進行診斷,由于A電廠缺失故障錄波啟動信號和事故總信號,診斷程序將無法啟動。故障時刻為600 ms,故障啟動算法在604 ms時計算結果為Δf(t)=1.57 kA,滿足式(5)的設定值,故啟動故障診斷程序,其故障編碼為(384,768,2304)。B變電站由于缺少開關分位信號,僅由開關量程序也無法進行診斷。取圖9(b)中保護動作100 ms后的一個周波內的數據進行計算得,Ub=148.57 kV,Uc=140.27 kV,均滿足式(7),故可判斷開關位置應為分位,斷路器分位遙信信息丟失。修正后的編碼為(384,768,2304)。 將兩個站的編碼分別輸入PNN分類器后,輸出類別都為49,對應故障類型為“瞬時故障、重合成功;主保護動作,本線路故障;A相故障”。故障相判別程序的特征值集合A的計算結果為(1,1,0,0,0,0),對應故障類型為A相接地故障。故障分析模塊經過第9條分析路徑,輸出結果為“正確動作”。最后,本次診斷綜合輸出結果如表4所示。 由表4可以看出本方案診斷結果詳細、準確。 算例2。取南方電網某處的實際故障案例進行診斷[15],如圖10所示。 初始故障點在線路L1上,由于保護拒動、誤動等原因造成連鎖故障,最終導致6條線路跳閘,一個發電廠解列。事故實際發展過程描述如下: (1)線路L1發生A、C兩相接地短路,S5側零序 I段、高頻、距離保護同時動作,CB1跳閘; 表4 診斷結果 圖10 電網局部接線圖 (2)線路L1的S1側保護拒動,斷路器未跳,造成線路L2的S8側的零序 IV段保護動作跳開CB7; (3)線路L4兩側零序 IV段誤動跳開CB3、CB4; (4)線路L6、L7保護拒動,導致1~4號主變壓器低壓過流保護動作,CB01~ CB04斷路器跳閘; (5)線路L8保護拒動,造成線路L11的P3側零序 IV段保護動作,CB24跳閘,線路L12兩側零序 IV段保護動作,CB17、CB18跳閘。 (6)線路L5的S11側高頻保護誤動,CB16跳閘。 上述故障過程中各廠站均有事故總信號,但均沒有重合閘信號。根據各個廠站的故障數據,以廠站為單位,分別對站內各個元件進行診斷。將所有故障數據輸入診斷程序后,僅有線路L1的故障相判別程序的計算結果與特征集C相匹配,為(0,0,0,1,1,1,0,0,0),代表A、C兩相接地故障。而S1無保護動作信息,線路L1在S1端的故障分析模塊經路徑7輸出結果“保護拒動”,從而觸發圖6中“是否有相鄰元件拒動”搜索條件,經路徑10可得出線路L6、L7、L8后備保護拒動。其他元件分析結果均可由圖6的邏輯分析路徑得出,不在贅述。由于故障區域為220 kV及以下電壓等級,故斷路器跳閘字段編碼為空,例如,線路L1在S1端的故障編碼為(192,864,),開關量診斷程序啟動“分字段輸出”模式。各個元件的綜合診斷結果如表5所示。 表5 綜合診斷結果 由表5可見,本文所提故障診斷方案在處理多重復雜故障時,診斷結果詳細、準確、全面。尤其在涉及誤動拒動時,故障分析模塊可清晰呈現故障發展過程,為調度員準確判斷故障,及時采取措施進行故障處理提供了極大幫助。 本文首先提出一套基于開關量的故障編碼方案,并在此基礎上構造PNN分類器對故障進行分類。對于遙信可能存在誤報、漏報的問題,提出利用WAMS的電氣量信息進行修正。并針對僅用開關量有時無法判別故障相的缺陷,提出利用WAMS的采樣電流進行故障相判斷。最后構造了故障診斷模塊對多源故障數據進行綜合分析。理論分析表明本方案可處理包括信息畸變,保護或斷路器誤動、拒動等復雜情況在內的多種故障情況,并且本文故障編碼方案還可輸出裝置故障、PT、CT斷線等告警信號,對故障進行快速,準確,全面地診斷,可滿足調度實用化要求。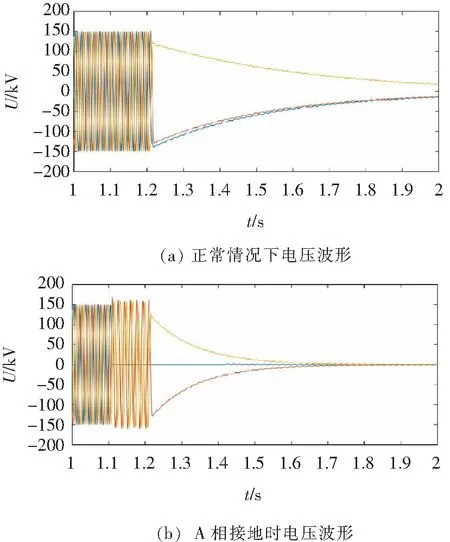
2.3 故障相識別方法
3 基于PNN的開關量診斷模型
3.1 概率神經網絡簡介
3.2 PNN分類器的構造
3.3 分類結果分析
4 基于多源數據的快速智能診斷方案
4.1 故障分析模塊的設計
4.2 故障診斷流程

5 故障案例分析
6 結束語
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
