基于深度語義分割的無人機遙感影像水體提取研究
2022-10-11 03:00:54江沛原
現代計算機 2022年15期
江沛原
(西南民族大學電子信息學院,成都 610041)
0 引言
語義分割任務也可以看作是特殊的分類任務,密集像素級分類任務。深度學習方法在場景復雜的遙感影像中,能夠自適應地提取淺層的低級特征和深層的高級特征,經過特征融合高效挖掘豐富的語義信息。并且無人機遙感具有機動性好、環境影響小、空間分辨率高等優點。因此,高分辨率的遙感影像與深度學習技術的結合在遙感影像語義分割領域具有重要的現實意義,為無人機遙感影像的水體提取提供了新手段。地球表面由各種復雜類型的水和非水地貌組成,具體而言,地表水類型包括河流、湖泊、水庫和海洋,它們具有不同的形狀和光譜;非水類型包括陰影、柏油路和建筑物,它們具有相似的光譜和空間特征,容易與地表水混淆。因此,地表水測繪通常在精度上受到限制。通過地表水面積的大小和水的深淺程度可以監測遙感影像中的水體信息,為了充分地了解水體的變化情況,最行之有效的方法是對遙感影像中的水體信息進行提取。與提取遙感影像中的森林植被、城市道路、建筑物等其他類型地物相比,從遙感影像上提取水體的研究更為常見。隨著空間探測技術的發展,基于遙感衛星的對地觀測遙感數據為大范圍水體提取提供了新的數據基礎,同時也對現有的遙感數據分析方法提出了極大的挑戰。
隨著深度學習在圖像分類、目標檢測、語義分割等圖像處理任務中展現出來的優異性能,近些年,使用深度學習方法進行水體提取的研究 越 來 越 多。Yang等利 用 傳 統 的NDWI、NDVI、NDBI等指數人工構建特征作為網絡的輸入,然后使用稀疏自動編碼器進行水體檢測,能夠在有限標簽樣本的情況下學習水體特征;Isikdogan等采用基于深度學習的方法,提出了從數據中學習水體特征的Deep Water Map模型,可有效區分水與土地、雪、冰、云和及陰影區。Li等利用FCN從高分辨率遙感影像中提取城市水體,并對比分析了輸入特征、訓練數據、遷移學習和數據增廣四個因素對實驗結果的影響,利用最優模型獲得了較高的提取準確率。Wang等將深度學習方法應用到高分辨率遙感影像的水體識別與提取中,通過構建深度神經網絡模型來提高遙感影像水體識別的精度,研究結果表明,所選用的深度卷積神經網絡模型的識別效果都顯著優于傳統的水體指數法,驗證了神經網絡應用于遙感影像水體提取的可行性。Li等提出了一種基于無人機高分辨率遙感影像的復雜環境下水體識別的快速準確方法。與現有方法相比,該方法在準確率上取得了顯著提高,可獲得城市區域內明顯的水邊界,為城市水矢量制圖提供數據。
針對水體提取的研究,如何減少遙感影像的噪聲干擾仍是水體信息提取的難點,且水體流動反光,建筑物和陰影的遮蓋等因素也會增加提取的難度。另外,現有研究多是針對衛星遙感影像的水體提取,識別精度較低。衛星遙感觀測的信息不但宏觀、綜合,還可以長期連續觀測,形成時序信息。由于無人機近地面的緣故,總體上分辨率高、時效性好,數據處理也比衛星遙感復雜。因此,本研究構建無人機遙感影像數據集,旨在提高其水體識別精度,采用基于OCRNet語義分割模型結合HRNet的方法進行水體提取。實驗結果表明,該網絡在分割準確率上效果較優,得到不錯的結果,驗證了該方法的可靠性。
1 無人機遙感影像數據集
1.1 數據集介紹
無人駕駛飛機(UAV)通常被稱為無人機,無人機平臺可搭載多種微傳感器來獲取不同質量的無人機遙感影像,從而構成無人機遙感系統。無人機遙感由遙感探測技術、導航定位技術、無線通信技術及飛行技術于一體,是一個系統而復雜的工程,在管理地理空間信息方面高效且方便。在深度學習的神經網絡語義分割任務中,數據集由訓練數據集(train dataset)、驗證數據集(validation dataset)和測試數據集(test dataset)三部分組成。其中,訓練集用于模型構建,計算訓練誤差的梯度和更新訓練的權重參數;驗證集用于調整模型的超參數和避免訓練過程出現過擬合現象,用于輔助模型構建;測試集用于提高模型訓練的準確度和最終模型的泛化能力,用于評估模型的準確率。
圖1所示為初始無人機影像分布(共200張,像素6000×4000,格式為.JPG),通過ENVI 5.3軟件對數據進行預處理裁剪,制作得到水體提取數據集(共4800張,像素512×512,格式為.PNG)。UAV_DATASET數據集包含三個文件夾:Annotation、JPEGImages和val_big_img。其中,Annotations文件夾保存的是各原圖的像素級別的二值圖真值信息;JPEGImages文件夾包含無人機影像的原圖,命名方式相同;val_big_img文件夾包含隨機選取的二十張大圖,用于放入驗證集中,此外還包含兩個文本:val_list和train_list,分別記錄訓練數據集(3888張,占81%,格式為.PNG)和驗證數據集(912張,占19%,格式為.PNG)。val_list文本存儲的信息是val_big_img中的大圖圖片名構成驗證集,而train_list則是剩下的圖片構成訓練集。
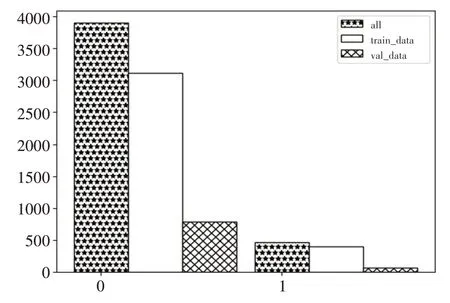
圖1 數據集類別分布圖
數據集的部分樣本原圖如圖2所示,考慮到構建數據集的多樣性,分別選取了無水體原圖、不規則形狀水體原圖、包含水體范圍較廣等具有代表性的圖片,增加了數據集的魯棒性。在構建數據集的過程中,由于無人機影像原圖為三通道RGB圖像,而輸入到Annotations文件夾內,只需要原圖對應的二值圖,因此還需要將RGB圖像灰度化的操作,使之位深度由24降為8。

圖2 數據集的部分樣本原圖
與圖2對應的數據集的部分樣本真值如圖3所示,數據預處理后得到的二值圖呈黑白圖像,包含非水體(0)與水體(1),非水體表現為黑色,水體表現為白色。類別數為2,因此無人機影像的水體提取任務可以看作是一個二分類問題。

圖3 數據集的部分樣本真值
1.2 數據集圖像裁剪制作
將遙感影像根據感興趣區域(region of interest,ROI)范圍大小對被裁剪影像進行裁剪,采用ROI方法裁剪無人機遙感影像得到數據集。數據集制作技術方案如圖4所示,包括以下三個主要步驟:
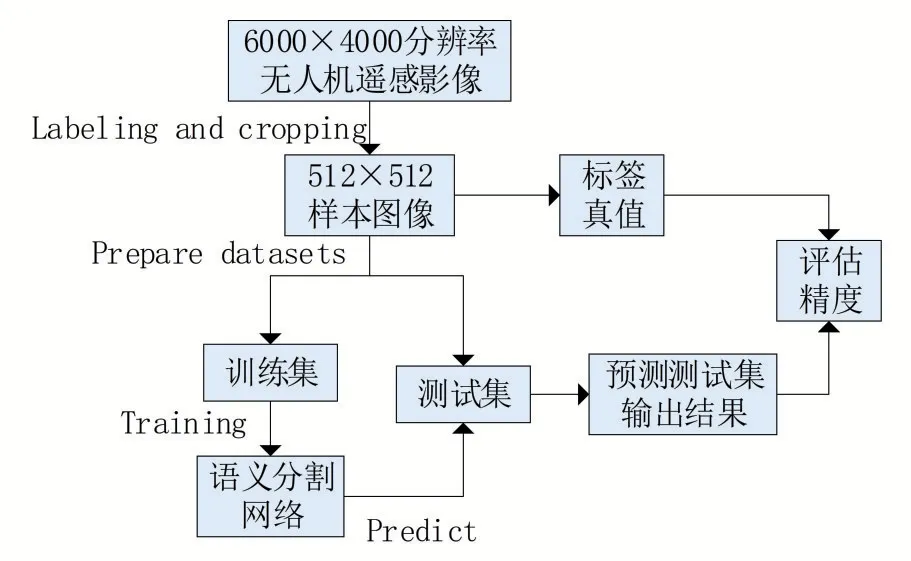
圖4 數據集制作技術方案圖
(1)收集研究區無人機遙感影像,標記(水體與非水體)和裁剪無人機影像以獲得512×512像素的樣本圖像,用于生成訓練數據集和驗證數據集;
(2)構建語義分割網絡,并使用訓練數據集訓練網絡;
(3)最后通過使用測試區域的真實標簽和分類結果來評估分割結果,分類結果由測試數據集的預測結果拼接而成,評估模型精度。
數據集的裁剪采用滑動窗口預測方法,并將關聯預測結果拼接,確定漁網(256×256)左上角和右下角中心像素坐標,據此確定需要填充的四至距離,預測圖在填充圖坐標系下的位置,并摳取需要預測的小圖,將預測圖有效區域添加到全0填充圖上。
2 實驗方法
2.1 語義分割模型OCRNet
語義分割是一項密集像素預測任務,研究重點在于解決逐漸衰減的特征圖尺寸和需要原圖尺寸的預測之間的矛盾,因此圖像中每個像素的上下文信息是極其重要的。物體的上下文信息旨在顯式增強物體信息,通過計算一組物體的區域特征表示,并根據物體區域特征表示與像素特征表示之間的相似度將這些物體區域特征表示傳播給每一個像素。將像素的標簽看作是像素所在物體的標簽,通過對應的物體區域來表示以此加強像素的表征,于是OCRNet語義分割模型被提出,其主要思想是像素的類別標簽由其所在目標決定,使用目標區域表示來增強其像素表示。
2.2 骨干網HRNet
HRNet能夠全程保持高分辨率的特征圖,得到更為精準的空間信息,其多尺度融合策略可以得到更為豐富的高分辨率表征,使預測的熱點圖(heatmap)更為準確。HRNet總體結構按照順序可分為三部分:stem net、HRNet stages和segment head。stem net從圖像到1/4大小的feature map,得到此尺寸的特征圖后HRNet始終保持此尺寸的圖片;HRNet stages是由HighResolutionModule組成的模型,其中,每個藍色底色為1個階段,每個stage產生的multiscale特征圖的具體配置見表1(以hrnet_48為例)。stage的連接處有transition結構,用于不同stage之間的連接,完成channels及feature map大小對應;segment head將stages輸出的4種scale特 征concat到 一 起,加 上num_channels到num_classes層,得到分割結果。

表1 多尺度特征圖的具體配置
HRNet的head頭多樣化,支持不同的輸出模式,對應V1,V2,V3三種版本,如圖5所示,分別為a,b,c三種形式。
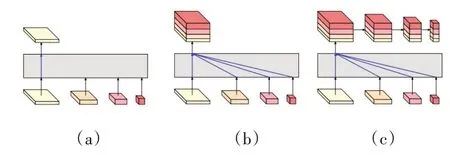
圖5 HRNet的head輸出形式
(a)輸出內容僅包含最后輸出的高分辨率特征;
(b)輸出內容在最后也進行了跨分辨率融合,再輸出高分辨率特征;
(c)語義信息較豐富,先進行融合后輸出高分辨的特征,再進行下采樣得到多個sacle的輸出,并且(b)和(c)的特征融合是通過沿通道方向拼接的方式拼接融合的。
2.3 語義分割網絡OCRNet結合HRNet骨干網
來自于NVIDIA的研究團隊采用OCRNet+HRNet作為主干網絡結構并且設計了一種更高效的多尺度融合方法,取得了更好的精度效果。本文結合OCRNet模型設置三種不同輪次、兩種不同實驗方法:HRNet_w18和HRNet_w48分別在10 epoch、30 epoch、60 epoch運行。其中,HRNet_w18方法中的18代表模型最后三級高分辨率子網絡的寬度。OCRNet利用物體信息增強像素的上下文信息,HRNet保持主干網的高分辨率并且提供強語義信息與精準位置信息,它們的組合具有有效性,能夠較好地對無人機影像中的水體信息進行提取。
2.4 網絡模型的參數設置
常規優化器是單一的,在本研究的訓練過程中,在優化器的基礎上添加動量,使用隨機梯度下降(stochastic gradient descent,SGD)算法進行優化,SGD算法的動量參數(momentum)和權重衰減參數(weight_decay)分別設置為0.9和4.0e-05,使用權重衰減的目的是防止過擬合。根據GPU的計算能力、顯存大小、圖像像素大小和樣本數,將實驗數據批量大小設置為8,batch_size的值為迭代一次送入網絡的圖片數量,一般顯卡顯存越大,批量值就可以越大。學習率是指模型訓練的權重參數在逆梯度方向上調節的步長,為了保證訓練過程順利進行,采用了變化學習率策略,通過多項式衰減的策略將學習率值從初始設置為0.01的learning_rate,逐步衰減到end_lr為0的最終學習率,power即衰減率這一參數設置為0.9,類型為PolynomialDecay。
水體像素級別分類任務通過Softmax函數將每一個像素點值映射為一個概率值,來確定每一個像素值是否屬于水體類,達到像素級別的預測損失函數的選擇也是非常關鍵的,它是BP算法的核心部分,用來衡量預測值和標簽值之間的差異。損失函數包括常規損失函數和多損失函數,前者單一且固定,本文采用的是通過coef連接CrossEntropyLoss和LovasSoftmaxLoss的多損失函數,該混合損失函數可用來監督像素和對象級別的訓練過程。其中,Lovasz-Softmax loss是一種針對mIoU優化功能的損失,它基于子模損失的凸Lovasz擴展。在圖像分割任務中,經常出現類別分布不均勻的情況,因此本文引入LSLoss以提高OCRNet中對象區域表示的準確性,并在對象級別優化最終分割結果。語義分割只關注像素級分類,缺乏對象級分類的優化。通過計算誤差,將得到的誤差進行反向傳播。網絡模型在訓練過程中使用交叉熵作為損失函數,它可有效地對模型進行預測。
3 實驗結果與分析
3.1 實驗環境
本研究基于Ubuntu 18.04操作系統,使用的開發環境、編程語言和深度學習框架依次為Anaconda3、Python3.7.4和Pytorch,編 譯 器 為PyCharm。模型訓練、驗證和測試均在一個NVIDIA GTX 1080Ti GPU上進行。
3.2 評價指標
評價指標用來評估不同算法在某一方面的效果是否最佳,可對算法進行不同程度的優化。為定量分析圖像語義分割精度,在圖像分割領域中,評估模型質量主要是通過準確率(Acc)、Kappa系數以及語義分割評價指標均交并比(mean intersection over union,mIOU)這三個指標對4800幅影像的水體提取模型進行評定。
準確率是最常見的評價指標,表示被正確分類的數量在所有預測該類的數量中的占比,準確率越高表明模型質量越高。準確率由該類所有被正確分類的樣本數除以模型預測中屬于該類的總數得到。準確率的計算如式(1)所示:

式中:表示的是預測結果為正例,標簽為正例的像素數量;表示的是預測的結果為負例,標簽的結果為負例的像素數量;表示的是預測結果為正例,標簽為負例的像素數量;表示的是預測結果為負例,標簽為正例的像素數量。
Kappa系數是用于一致性檢驗的指標,可用來衡量分類的結果。取值范圍是[-1,1],通常大于0,將其分為五組來表示不同級別的一致性:0.0~0.2極低的一致性(slight);0.21~0.40一般的一致性(fair);0.41~0.60中等的一致性(moderate);0.61~0.80高度的一致性(substantial);0.81~1幾乎完全一致(almost perfect)。基于混淆矩陣的Kappa系數計算如式(2)所示:

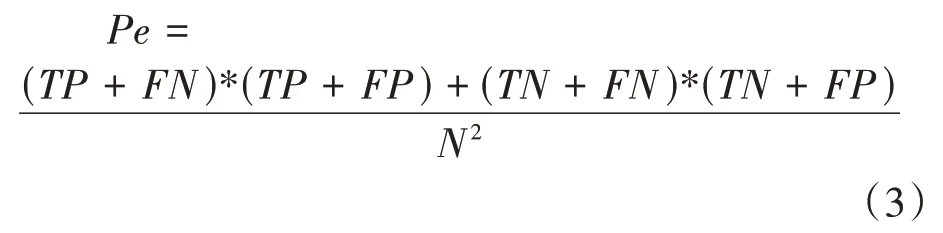
式中:代表每一類中正確分類像元素,即;代表所有類別對應的實際與預測數量的成績的總和除以樣本總數的平方,如式(3)所示:
mIOU為語義分割的標準度量對每個類別數據集單獨進行推理計算,計算出的預測區域和實際區域交集除以預測區域和實際區域的并集,然后將所有類別得到的結果取平均。在圖像分割中,就是真實值(ground truth)和預測值兩個集合。先計算每個類別的交并比,然后計算均值,如式(4)所示:

3.3 結果分析
表2列出了OCRNet網絡結合HRNet_w18骨干網在不同輪次下在訓練集上的評價指標。從實驗分析可得,10 epoch和60 epoch訓練輪次數下的各評價指標效果不及30 epoch訓練輪次,后者的評價效果最佳:Acc可達99.30%,Kappa系數(KC)為0.9231,mIoU為0.9281。此時最佳驗證迭代數為13122。
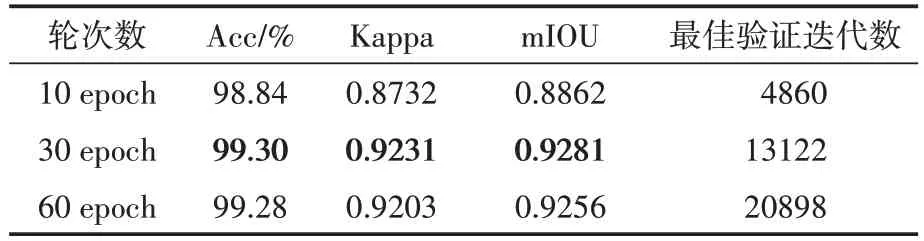
表2 OCRNet+HRNet_w18不同輪次的評價指標
表3列出了OCRNet網絡結合HRNet_w48骨干網在不同輪次下在訓練集上的評價指標,從實驗分析可得,隨著訓練輪次的增加,各項評價指標也有一定的提高,在60 epoch時達到最佳:Acc可達99.24%,Kappa系數(KC)為0.9136,mIoU為0.9199。此時最佳驗證迭代數為23814。
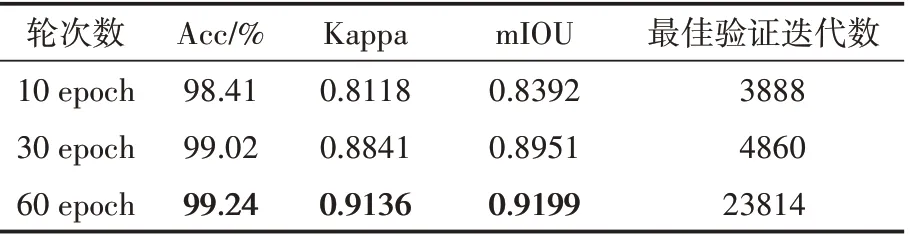
表3 OCRNet+HRNet_w48不同輪次的評價指標
值得一提的是,當OCRNet網絡結合HRNet_w18骨干網的輪次達到60 epoch時,各精度卻有一定程度的下降,可見并不是訓練輪次越多精度越高。迭代輪數過少可能欠擬合,而過多則可能過擬合,需要在訓練中不斷摸索找到大致合適的范圍,或者可采用提前終止策略等。總體來看,語義分割模型OCRNet結合HRNet_w18骨干網在30 epoch輪次時,效果最好。
3.4 預測效果
在語義分割模型中輸入6000×4000分辨率的遙感影像(水平分辨率和垂直分辨率均為350 dpi),預測其水體提取效果。如圖6所示,左側為原圖,右側為偽彩色預測結果圖片,可直接查看各個類別的預測效果。對無人機遙感影像水體提取這一任務來說,總體精度較高,但對于圖中誤檢測以及由于陰影遮擋等原因未識別到的水體部分,后續的工作仍需調整超參數來改進模型。

圖6 水體的預測效果圖
4 結語
語義分割任務旨在獲取輸入圖像中每個像素的類標簽,而無人機遙感影像水體提取任務旨在獲取輸入圖像中的每個像素,這兩個任務概念上有一定的一致性,因此可以將遙感影像提取任務轉化為語義分割任務。本研究根據無人機遙感影像在復雜環境下采用OCRNet語義分割模型結合HRNet骨干網進行水體提取,擴充后的數據集涵蓋水體信息更為豐富,也進一步提高了其魯棒性,通過設置不同的實驗,選取最優模型的神經網絡完成水體數據集的提取。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
開放教育研究(2020年2期)2020-03-31 01:54:14
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19
現代語文(2016年21期)2016-05-25 13:13:44
大連民族大學學報(2015年2期)2015-02-27 08:28:11
