一種用于懸掛升降自動平衡系統及其控制方法的開發與應用
2022-10-10 12:38:08岑秋儀
農業開發與裝備 2022年8期
荊 毅,岑秋儀
(廣東皓行科技有限公司,廣東佛山 528300)
0 引言
隨著智慧農業、無人駕駛農機技術在農業領域的使用和縱深發展,智能農機已成為實現無人駕駛技術發展的必要條件,只有農機實現了智能化控制,才能確保智慧農業以及無人駕駛技術的推廣使用。農業場景主要涉及耕、種、管和收四個環節,拖拉機作為農業場景中應用最為廣泛、用途最多的農機動力源,通過掛接不同的農機具實現農業場景中的耕整地、播種和運輸環節。耕、種環節的作業質量直接影響到農作物后期的生長、生產和產量,主要是利用拖拉機通過后三點懸掛升降系統完成牽引作業,其作業質量與拖拉機懸掛升降平衡位置系統關系極為密切。
傳統拖拉機的三點懸掛升降是通過升降油缸、上拉桿總成、左右兩側提升桿總成、左右兩側下拉桿總成的左右限位桿,完成農機具的掛接和升降作業。除懸掛升降由油缸實現外,其余都是依靠手工進行反復多次調節來完成農機具前后、左右的水平控制,調節后,在作業過程中由于地形和工況變化不能實時調整農機具的左右、前后水平,農機具無法實現仿形作業和平整作業的需求,因此不具備自動駕駛控制技術。
1 主要內容
針對傳統拖拉機三點懸掛在實際作業過程中無法實時進行前后、左右自動調整平衡所掛接農機具的缺陷,根據拖拉機三點懸掛牽引掛接農機具實際作業的質量需求,通過改變原有懸掛結構設置,利用液壓油缸替代原有機械拉桿,配以雙軸角傾角傳感器實時采集數據,控制器融合算法解析,把控制信號輸入到電控液壓閥組,從而控制油缸的伸縮來完成農機具的平衡和實際作業需求。
2 關鍵技術
1)懸掛升降依靠安裝在提升臂的角度傳感器進行監測,并將實時監測位置反饋到MCU,MCU根據監測位置下發控制指令給電控閥,電控閥控制油缸準確升降。
2)左右兩側機械式提升桿總成改用液壓油缸左右控制,在掛接的農機具上安裝雙軸角傾角傳感器監測農機具左右水平位置。通過傳感器監測的左右兩側傾角,實時控制農機具既可以實現仿地形作業,又可以實現平地作業,實現整地平整,播種深度一致。
3)機械式上拉桿總成改用液壓油缸左右控制,兩個油缸的進油方式為:左側油缸有桿腔和右側油缸無桿腔為同一路;左側油缸無桿腔和右側油缸有桿腔為同一路。左側油缸提升時,右側油缸下降,該過程可實現左右平衡,也可實現左側比右側高或右側比左側高,實現仿形作業。
4)在農機上安裝雙軸角傾角傳感器,監測農機具左右、前后位置,使農機具在作業過程中具備地形仿形和平整度作業需求。
3 控制邏輯及實施方案
3.1 控制邏輯
農機具前后、左右控制系統邏輯架構流程(圖1、圖2)。

圖1 農機具前后控制系統邏輯架構流程

圖2 農機具左右兩側控制系統邏輯架構流程
3.2 實施方案
左側升降油缸7、右側升降油缸8,左側平衡油缸5、右側平衡油缸6一端通過銷軸連接到提升擺臂50,左側升降油缸7、右側升降油缸8的另一端連接到拖拉機本體支座上。左側平衡油缸5的另一端連接到左側下拉桿總成2、右側平衡油缸6的另一端連接到右側下拉桿總成3;前后平衡油缸4的一端連接到拖拉機本體,另一端連接到農機具300的上懸掛200上。雙軸角傾角傳感器1安裝到農機具變速箱上表面平整的位置,電控閥組10和MCU11安裝到拖拉機本體上。農機具300上的左支座201通過銷軸100與左側下拉桿總成2連接,右支座202通過銷軸100與右側下拉桿總成3連接,上懸掛200通過銷軸40與前后平衡油缸4連接(圖3、圖4、圖5、圖6)。

圖3 拖拉機懸掛升降自動平衡系統主視圖

圖4 拖拉機懸掛升降自動平衡系統剖視圖

圖5 拖拉機懸掛升降自動平衡系統剖視圖
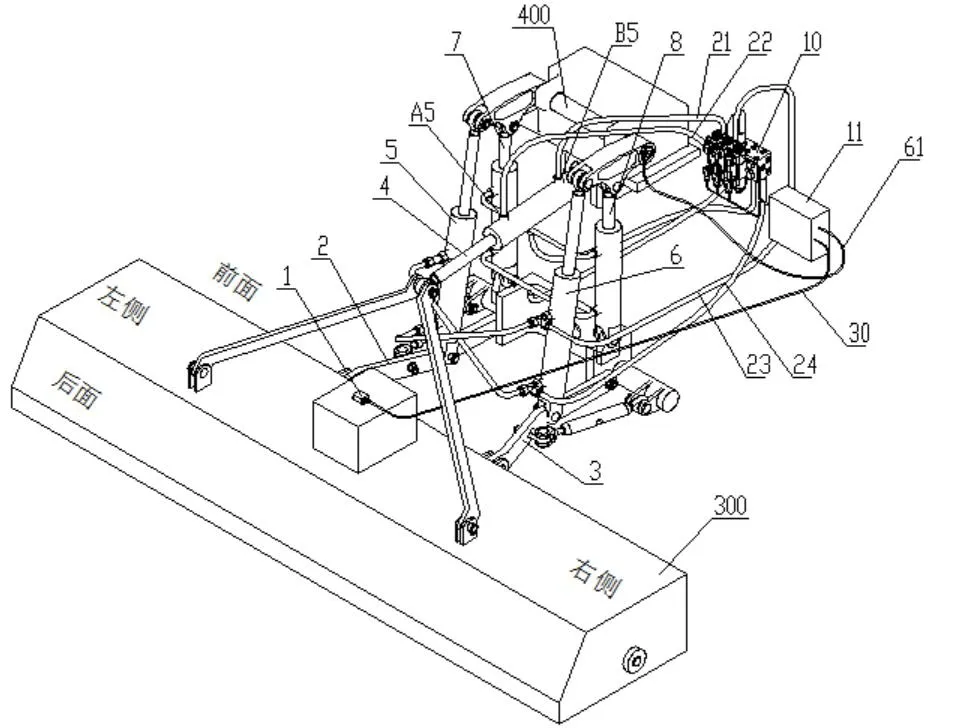
圖6 拖拉機懸掛升降自動平衡系統等軸測圖
拖拉機牽引農機具300工作時,農機具300作業的高低位置通過安裝在懸掛升降提升擺臂50支承軸400上的角度傳感器60實時監測。當角度傳感器60監測到農機具300位置偏低時,角度傳感器60把監測的角度值通過連接在其上的信號線61輸入到MCU11,MCU11通過融合算法解析,把信號指令發給電控閥組10,閥組10通過連接在其上的油管25和油管28把液壓油從左側升降油缸7的B3,右側升降油缸8的B4進入,有桿腔中的液壓油通過左側升降油缸7的A3、右側升降油缸8的A4回油流進油管27和油管26進入電控閥組,左側升降油缸7和右側升降油缸8活塞桿同時同步收回,從而使農機具300提升。角度傳感器60監測到農機具達到需求后,MCU11停止給電控閥組10下發指令。反之,當角度傳感器60監測到農機具300位置偏高時,角度傳感器60把監測的角度值通過連接在其上的信號線61輸入到MCU11,MCU11通過融合算法解析,把信號指令發給電控閥組10,電控閥組10通過連接在其上的油管26和油管27把液壓油從左側升降油缸7的A3、右側升降油缸8的A4進入,無桿腔中的液壓油通過左側升降油缸7的B3,右側升降油缸8的B4回油流進油管28和油管25進入電控閥組,左側升降油缸7和右側升降油缸8活塞桿同時同步伸出,從而使農機具300降低。角度傳感器60監測到農機具達到需求后,MCU11停止給電控閥組10下發指令。
通過安裝在農機具300上的雙軸角傾角傳感器1在線實時監測農機具300前后、左右的傾角。如果監測到農機具300前面低于后面,雙軸角傾角傳感器1把監測的角度值通過連接在其上的信號線30輸入到MCU11,MCU11通過融合算法解析,把信號指令發給電控閥組10,電控閥組10通過連接在其上的油管21把液壓油從前后平衡油缸4上的B5口進入,有桿腔中的液壓油通過前后平衡油缸4上的A5口回油流進油管22進入電控閥組,前后平衡油缸4的活塞桿伸出,從而使農機具前面升高到與農機具后面水平一致。這時,雙軸角傾角傳感器1可監測到農機具前后水平,MCU11停止給電控閥組10下發指令。反之,如果監測到農機具300后面低于前面,雙軸角傾角傳感器1把監測的角度值通過連接在其上的信號線30輸入到MCU11,控制器通過融合算法解析,把信號指令發給電控閥組10,電控閥組10通過連接在其上的油管22把液壓油從前后平衡油缸4上的A5口進入,無桿腔中的液壓油通過前后平衡油缸4上的B5口回油流進油管21進入電控閥組,前后平衡油缸4的活塞桿收回,從而使農機具后面升高到與農機具前面水平一致。這時,雙軸角傾角傳感器1可監測到農機具前后水平,MCU11停止給電控閥組10下發指令。
如果雙軸角傾角傳感器1監測到農機具300左側低于右側,雙軸角傾角傳感器1通過連接在其上的信號線30把監測角度值輸入到MCU11,控制器通過融合算法解析,把信號指令發給電控閥組10,電控閥組10通過連接在其上的油管23把液壓油從右側平衡油缸6上的A2口進入,無桿腔中的液壓油通過右側平衡油缸6上的B2口流進油管24進入電控閥組,右側平衡油缸6的活塞桿收回,同時油管23把液壓油通過油管30從左側平衡油缸5上的B1口進入,有桿腔中的液壓油通過左側平衡油缸5上的A1口通過油管29和油管24進入電控閥組,左側平衡油缸6的活塞桿伸出,從而使農機具左側升高直到與農機具右側水平。這時,雙軸角傾角傳感器1可監測到農機具左右水平,MCU11停止給電控閥組10下發指令。反之,如果雙軸角傾角傳感器1監測到農機具300右側低于左側,雙軸角傾角傳感器1通過連接在其上的信號線30把監測角度值輸入到MCU11,控制器通過融合算法解析,把信號指令發給電控閥組10,電控閥組10通過連接在其上的油管24把液壓油從右側平衡油缸6上的B2口進入,有桿腔中的液壓油通過右側平衡油缸6上的A2口流進油管23進入電控閥組,右側平衡油缸6的活塞桿伸出,同時油管24把液壓油通過油管29從左側平衡油缸5上的A1口進入,無桿腔中的液壓油通過左側平衡油缸5上的B1口流進油管30和油管23進入電控閥組,左側平衡油缸6的活塞桿收回,從而使農機具右側升高直到與農機具左側水平。這時,雙軸角傾角傳感器1可監測到農機具左右水平,MCU11停止給電控閥組10下發指令。
如果需要農機具300左側低于右側,雙軸角傾角傳感器1通過連接在其上的信號線30把監測角度值輸入到MCU11,根據左側與右側形成的角度需要,MCU11通過融合算法解析,把信號指令發給電控閥組10,電控閥組10通過連接在其上的油管23把液壓油從右側平衡油缸6上的B2口進入,無桿腔中的液壓油通過右側平衡油缸6上的A2口流進油管24進入電控閥組,右側平衡油缸6的活塞桿伸出,同時油管23把液壓油通過油管30從左側平衡油缸5上的A1口進入,有桿腔中的液壓油通過左側平衡油缸5上的B1口通過油管29和油管24進入電控閥組,左側平衡油缸6的活塞桿收回,從而使農機具左側降低,右側升高,直到農機具左側與右側形成的傾角滿足需求。這時,雙軸角傾角傳感器1可監測到農機具左右傾角,MCU11停止給電控閥組10下發指令。反之,如果需要農機具300左側高于右側,雙軸角傾角傳感器1通過連接在其上的信號線30把監測角度值輸入到MCU11,根據左側與右側形成的角度需要,MCU11通過融合算法解析,把信號指令發給電控閥組10,電控閥組10通過連接在其上的油管23把液壓油從右側平衡油缸6上的A2口進入,無桿腔中的液壓油通過右側平衡油缸6上的B2口流進油管24進入電控閥組,右側平衡油缸6的活塞桿收回,同時油管23把液壓油通過油管30從左側平衡油缸5上的B1口進入,有桿腔中的液壓油通過左側平衡油缸5上的A1口通過油管29和油管24進入電控閥組,左側平衡油缸6的活塞桿伸出,從而使農機具左側升高,右側降低,直到農機具左側與右側形成的傾角滿足需求。這時,雙軸角傾角傳感器1可監測到農機具左右傾角,MCU11停止給電控閥組10下發指令。
4 結語
通過懸掛升降自動平衡系統及其控制方法的開發與應用,不僅實現了拖拉機在牽引農機具作業過程中的仿形功能,還可以實現平整作業的功能需求。在耕整地環節,能夠實現土地表面平整度一致、耕深一致、開溝一致,特別是需要進行起壟種植模式的玉米,通過該套系統可以實現壟面的平整度。在播種環節,既可實現地形仿形播種,還可實現播深一致的功能。農業環節中耕整地的質量直接影響著種子的出苗率、后期的生長率和產量。該平衡系統及控制方法的開發和實際生產中的應用,極大地提高了農機的作業效率,促進了農機作業標準化、智能化以及智慧農業的發展。
