RobotStudio軟件在ABB工業機器人課程教學中的應用
2022-10-07 14:05:56朱巍峰
黑龍江科學 2022年17期
朱 勤,朱巍峰
(蘇州工業職業技術學院,江蘇 蘇州 215104)
隨著我國智能制造業的發展,工業機器人作為其中的重要組成部分已經被廣泛應用到了各種領域。我國已成為工業機器人的應用大國,但工業機器人技術人員存在大量缺口。為了滿足社會對工業機器人人才的需求,各大院校都開設了工業機器人技術專業,主要培養學生對工業機器人的操作、編程調試、系統集成、維護維修等能力。工業機器人應用是工業機器人技術專業的核心課程,其中工業機器人手動操作能力是最重要的基礎技能。蘇州工業職業技術學院開設了工業機器人專業,并在眾多工業機器人品牌中選擇了ABB機器人作為教學載體。在課程設置的能力目標中,將熟練操作機器人列為最基本技能,要求學生能夠將智能操作機器人移動到準確的位置,調整好正確的姿態,進而完成各項任務。如果學生的手動操作沒有掌握好,則會給后續的編程調試學習帶來很大難度。在教學過程中,由于學生手動操作掌握不足帶來的問題主要包括設備碰撞、定位不準確、軸配置錯誤等。在教學過程中,教師發現使用仿真軟件進行輔助教學能夠有效提高學生的手動操作能力,減少以上問題的發生。
1 手動操作機器人技能的學情分析
ABB機器人手動操作共包括單軸、線性和重定位三種模式,如圖1所示。
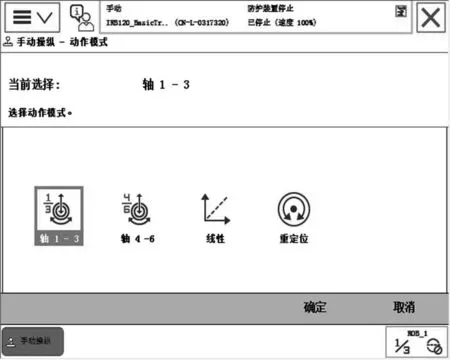
圖1 ABB機器人三種操作模式Fig.1 Three operation modes of ABB robot
第一,單軸模式最為直觀,使用搖桿控制機器人每個軸的轉動。例如,搖桿左右控制機器人1軸旋轉,搖桿上下控制機器人2軸旋轉。學生只要明確搖桿方向和機器人軸旋轉方向的對應關系,就可以正常進行機器人的操作控制。這種模式是學生最容易掌握的,但是由于單軸模式的運動方式是每個轉軸的旋轉,所以無法使機器人以直線運動。
第二,線性模式能夠使機器人在空間中做直線運動,運動方向也很直觀,是以三坐標的XYZ方向進行運動,它的難點在于坐標系的選擇。在使用線性模式之前,必須要先確定使用哪種坐標系。ABB機器人共包含4大坐標系,分別是大地坐標、基坐標、工具坐標和工件坐標。其中,大地坐標和基坐標都是不變的,學生在學習時比較容易理解和接受。但工具坐標和工件坐標是可變的,要根據實際工作情況自行設定。由此可見,線性模式是非常靈活的,但也代表其使用起來更為復雜,學生在學習過程中需要通過大量練習和實踐來加深對線性模式的理解和掌握。
第三,重定位模式的運動方式是圍繞一個固定點進行旋轉,使用時一般會選擇工具坐標作為旋轉的基準,也可以選擇其他三種坐標系作為基準。在此種模式下,機器人的運動范圍和幅度是最小的,但是旋轉方向的判斷是三種動作模式中最難的。當工具更換后,工具坐標發生變化,旋轉的方向也會隨之發生變化,對于學生來說掌握難度又會有所提高。
三種運動模式都具有各自的特點和作用,在實際的工作任務中,學生應能夠綜合運用這三種動作模式。例如,使用夾爪搬運工件,學生需要將機器人的夾爪移動到抓取工件的位置,先使用單軸模式調整夾爪的姿態,然后使用線性模式將夾爪移動到工件附近,最后用重定位模式對姿態進行微調。在此過程中,學生需要熟練掌握三種模式的使用,如果運動方向判斷錯誤,就有可能造成夾爪和工件的碰撞;如果軸的旋轉角度使用錯誤,就可能造成關節限位,無法到達夾取位置;如果學生操作不熟練,導致操作時間過長,就可能造成任務無法按時完成,教學效率下降等問題。
2 工業機器人課程教學存在的問題
2.1 課堂教學時間不足
由于工業機器人手動操作的實踐性較強,僅靠課堂教學時間是遠遠不夠的,因此必須安排大量練習時間,才能使學生達到一定的熟練度。蘇州工業職業技術學院的工業機器人實訓室共有9套工業機器人實訓臺,能夠保證4人共享一臺設備。一個課時平均分配,每人只有11 min的操作時間,如果再減去教師講解演示的時間,則留給學生的操作時間更少。如果增加課時來訓練學生的手動操作能力,則不利于后續編程調試等難度更高課程的進一步開展。如果手動操作的課時安排太少,學生的手動操作能力不足,也會對后續的編程調試任務產生影響。
2.2 學生學習能力存在差異
在實際教學中由于不同學生的學習能力和動手能力都存在較大差異,部分基礎較弱的學生無法在規定的操作時間內掌握操作技能,就必須把設備讓給其他同學。當有學生在操作中遇到困難的時候,就需要教師能夠即使進行現場指導,幫助解決問題。如果同時有多位學生需要求助教師的時候,教師則很難兼顧到每個學生,導致課堂效率和教學效果不佳。
2.3 機器人類型不夠多樣
ABB機器人的型號多種多樣,其手動操作方式也不盡相同。受場地和經費等問題的限制,學校實訓室無法配備所有類型的機器人。高校通常都使用小型的六軸工業機器人,如IRB20型機器人,大型工業機器人配備不足,這樣會導致手動操作的內容不夠完整。
3 RobotStudio仿真軟件在工業機器人課程中的應用策略
3.1 改善教學組織方式
本校在工業機器人課程教學中引入了RobotStudio仿真軟件,這是ABB公司的工業機器人仿真軟件,這個軟件的機器人庫中包含了ABB所有型號的工業機器人。將實際實訓臺通過建模導入到軟件中,通過創建機器人系統,開發了仿真實訓臺。在仿真實訓臺中能夠完成與實際實訓臺中相同的操作,便于學生在課下進行手動操作練習,如圖2所示。
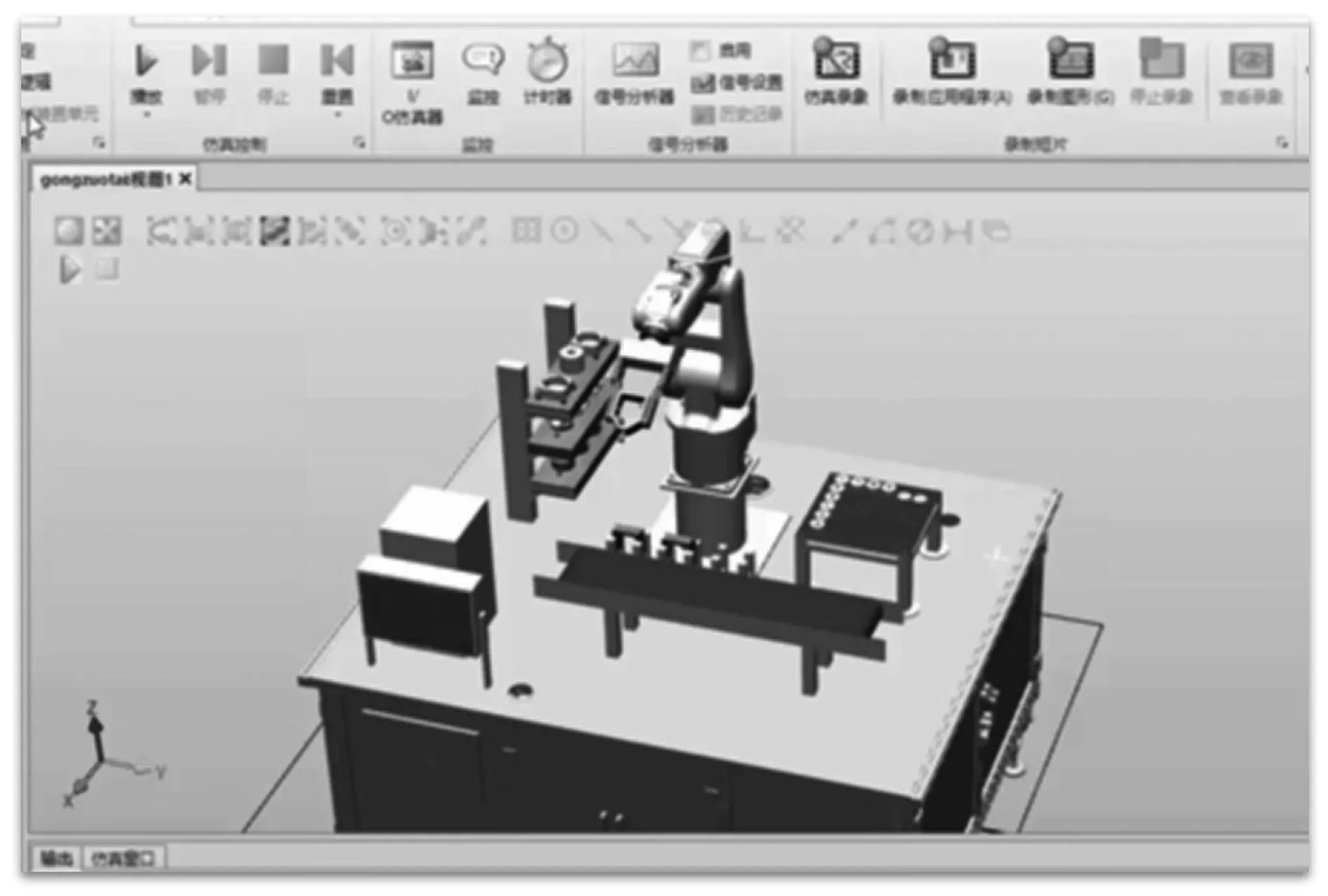
圖2 仿真工作站Fig.2 Simulation workstation
在仿真實訓臺的基礎上重新組織教學過程。采用課前、課中、課后相結合的混合式教學模式。將手動操作三種模式的操作過程制作成視頻,學生在課前自學視頻內容,然后在仿真實訓臺上進行操作練習,這樣可以使學生在課前完成對一些流程性的知識點和技能點的學習。在仿真軟件中進行操作練習的過程中,學生可以通過網絡向教師請教操作中遇到的問題,教師能夠及時答疑解惑。在課堂環節中,教師可以減少對理論知識的講解,重點組織學生討論操作中發現的問題,安排學生在實際實訓臺上進行操作驗證和考核,使教師可以在有限的課堂時間內,對學生的操作規范和熟練程度進行評價,并提出整改意見。在課后,學生可以根據課堂中發現的問題,進一步鍛煉并提高自身操作能力。
3.2 完善教學內容
高校應配備大型的四軸工業機器人、平面關節型機器人、并聯型機器人、雙臂協作型機器人等各類型機器人,使學生能夠掌握更多類型機器人的手動操作技術。將RobotStudio仿真軟件應用于不同類型的工業機器人操作中,加強對不同類型工業機器人的手動操作練習,如圖3所示。
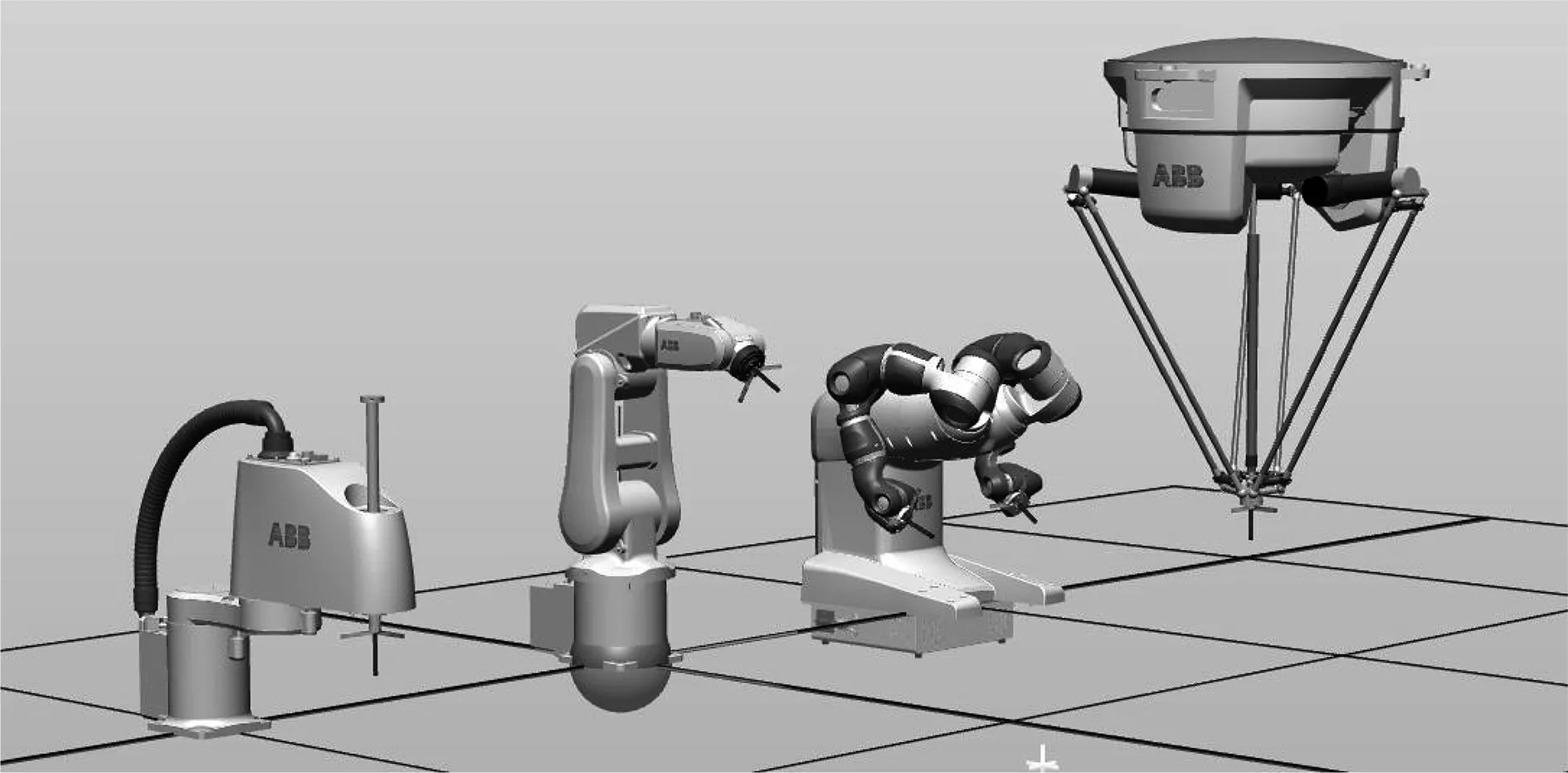
圖3 多種類型的工業機器人Fig.3 Many kinds of industrial robots
3.3 更加貼近生產實踐
手動操作的目的是將機器人的工具移動到具體的工作位置。實訓室中,基本使用的是小型機器人,其工具和工件的結構比較簡單,一般不需要考慮工具及工件的形態,工具和工件之間的干涉較少,操作難度較低。學生認為此類手動操作比較簡單,不愿意投入過多時間進行練習以提高操作水平。在實際的工業領域中,工業機器人在汽車生產線中的應用十分廣泛。在車門安裝工序中,由于車門較大且形狀不規則,因此用到的工具也較大且結構比較復雜,如圖4所示。在這種情況下工具和工件的干涉,以及在搬運過程中和周邊設備的干涉就非常復雜,對于手動操作的要求也非常高。利用RobotStudio軟件將車門安裝這一實際生產環節制作成仿真工作站,可以讓學生直觀地感受不同的生產實踐對手動操作的要求。

圖4 車門安裝Fig.4 Door installation
3.4 激發學生的創造能力
應用RobotStudio軟件進行輔助教學還能激發學生的創造能力,學生可以在仿真軟件中改變工作站的各項參數,體驗在不同參數下機器人操作的不同之處。學生也可以利用仿真軟件還原工業機器人的各種實際應用場景,還可以按照自己的想法自行設計不同功能的仿真工作站。
4 結語
對RobotStudio軟件在工業機器人手動操作教學中的應用展開研究,通過教學實踐驗證后,發現使用RobotStudio軟件進行輔助教學起到了良好的教學效果,學生對手動操作的認知更加深入完善,更加重視對手動操作技能的掌握。在課外通過軟件進行練習,為學生提供了更多操作時間和機會,提升了教學效率和教學質量。教師從以往的講授演示轉變為引導學生自主學習,從而取得了更好的教學效果。可見,進一步開發RobotStudio軟件在工業機器人課程教學中的應用具有重要意義。
猜你喜歡
快樂語文(2021年27期)2021-11-24 01:29:04
甘肅教育(2020年14期)2020-09-11 07:57:50
甘肅教育(2020年22期)2020-04-13 08:11:16
福建基礎教育研究(2019年3期)2019-05-28 23:14:43
作文世界(小學版)(2018年4期)2018-10-16 17:13:34
東方教育(2017年19期)2017-12-05 15:14:48
唐山文學(2016年2期)2017-01-15 14:03:59
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
快樂作文·低年級(2016年6期)2016-06-24 18:58:40
吐魯番(2014年2期)2014-02-28 16:54:42