不平衡電網(wǎng)下MMC-UPFC的反饋線性化滑模控制
2022-10-06 01:47:18周建萍周安杰茅大鈞孔凡森李逸凡
關(guān)鍵詞:系統(tǒng)
周建萍, 周安杰, 茅大鈞, 孔凡森, 李逸凡
(上海電力大學(xué) 自動(dòng)化工程學(xué)院, 上海 200090)

本文將反饋線性化(FLC)與滑模控制(SMC)相結(jié)合,且將其應(yīng)用于UPFC變換器的內(nèi)環(huán)控制.其中,F(xiàn)LC可實(shí)現(xiàn)MMC-UPFC非線性系統(tǒng)的完全解耦,但反饋線性化是基于系統(tǒng)模型進(jìn)行設(shè)計(jì)的,故依賴于系統(tǒng)參數(shù).因此當(dāng)內(nèi)環(huán)發(fā)生參數(shù)攝動(dòng)或外部擾動(dòng)時(shí),其魯棒性較弱.而SMC在面對(duì)內(nèi)部參數(shù)的變化及外部干擾時(shí)具有較強(qiáng)的抗干擾能力,故能夠與FLC有效互補(bǔ).通過仿真驗(yàn)證了所提控制策略的有效性.
1 MMC-UPFC拓?fù)浼皵?shù)學(xué)模型
本文所提出的基于MMC的UPFC拓?fù)浣Y(jié)構(gòu)如圖1所示,其主要由兩個(gè)背靠背連接的MMC變流器組成,且二者通過一個(gè)電容器相連.其中,MMC1通過變壓器Tsh并聯(lián)接入系統(tǒng),其可使接入點(diǎn)的交流與直流電壓保持穩(wěn)定;而MMC2則經(jīng)過變壓器Tse串聯(lián)接入系統(tǒng),主要負(fù)責(zé)調(diào)節(jié)潮流.同時(shí),MMC2還可等效于一系列能被任意調(diào)節(jié)的附加電壓源,其通過控制向線路中注入的電壓U12調(diào)整線路參數(shù),類似于將電容或電感連接到線路,最終實(shí)現(xiàn)了調(diào)節(jié)潮流的目標(biāo).圖1中,Us、Ur為系統(tǒng)兩端電壓;U1、U2為并、串聯(lián)換流器節(jié)點(diǎn)的交流電壓;Zs、Zr為發(fā)送端與接收端的傳輸線阻抗;Udc為直流電容電壓.
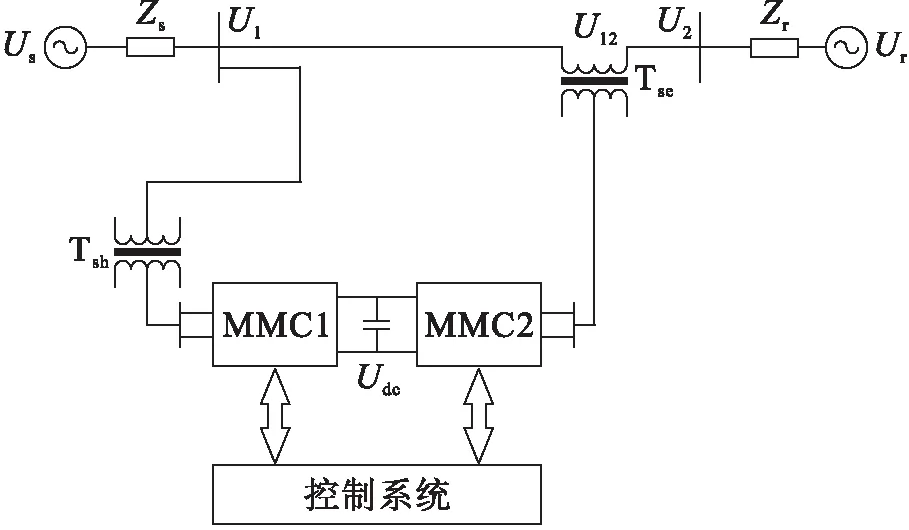
圖1 MMC-UPFC結(jié)構(gòu)Fig.1 MMC-UPFC structure
圖2為MMC-UPFC的單側(cè)拓?fù)浣Y(jié)構(gòu),其中換流器由三相六橋臂組成,而Ua、Ub、Uc分別表示MMC輸出三相交流電壓,且每個(gè)橋臂均由一個(gè)串聯(lián)電抗L0和N個(gè)子模塊(SM)串聯(lián)而成.SM通常采用半橋結(jié)構(gòu),即上、下兩個(gè)橋臂構(gòu)成一個(gè)相單元,其中,UM為子模塊電壓,USM為子模塊的輸出電壓.
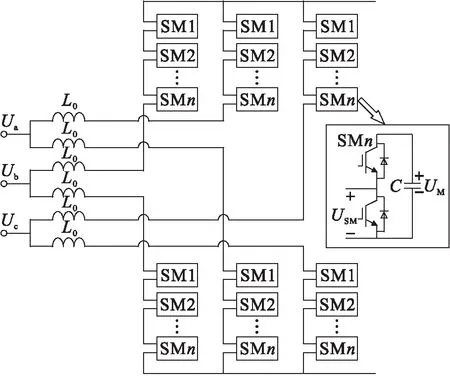
圖2 MMC-UPFC單側(cè)結(jié)構(gòu)Fig.2 One side structure of MMC-UPFC
在理想工作狀況下,MMC-UPFC的等效電路如圖3所示.
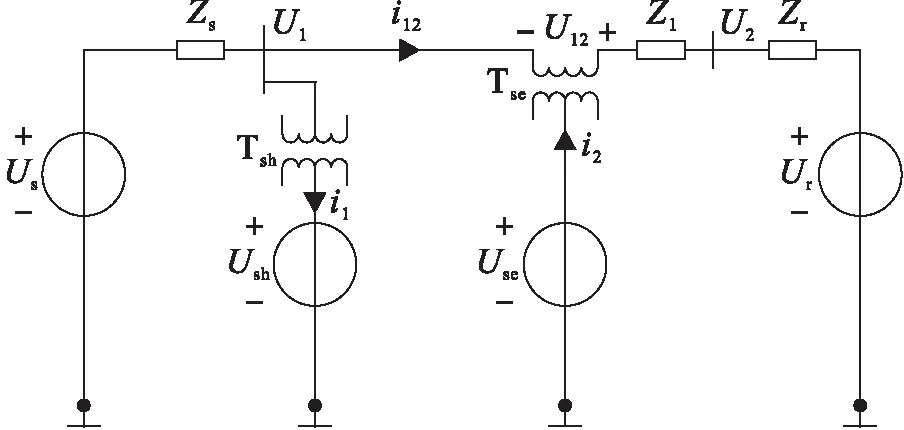
圖3 MMC-UPFC的等效電路模型Fig.3 Equivalent circuit model of MMC-UPFC
由圖3可知,MMC-UPFC在abc坐標(biāo)系中的數(shù)學(xué)模型為
(1)
(2)
式中:Ush、i1為并聯(lián)側(cè)換流器電壓、電流;Use、i2為串聯(lián)側(cè)電壓、電流;U12為串聯(lián)變壓器注入的電壓;i12為傳輸線電流;下標(biāo)j=a、b、c分別為三相分量;R、L為等效電阻和電感.
為了簡(jiǎn)化控制系統(tǒng),將式(1)~(2)經(jīng)過旋轉(zhuǎn)變換可得到換流器MMC在同步旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型為
(3)
(4)
式中:d、q分別為電氣量的d、q軸分量;ω為交流電網(wǎng)的基波角頻率.
傳輸線路中的有功和無(wú)功功率為
(5)
2 控制系統(tǒng)設(shè)計(jì)
MMC-UPFC系統(tǒng)具有非線性、強(qiáng)耦合的特點(diǎn),其電壓和電流分量在穩(wěn)態(tài)下與電網(wǎng)具有相同頻率的交流量,而非直流量.傳統(tǒng)的PI控制器無(wú)法實(shí)現(xiàn)對(duì)交流信號(hào)的無(wú)差調(diào)節(jié),但比例積分諧振控制(PIR)能夠跟蹤和控制交流信號(hào).其中PR控制器通常使用準(zhǔn)比例諧振控制,總傳遞函數(shù)為
GPIR(s)=GPI(s)+GPR(s)=
(6)
式中:KP、KI、KR分別為控制器參數(shù);ωc為截止頻率,其值會(huì)影響準(zhǔn)PR控制器的帶寬,且ωc越大,帶寬越大,控制器對(duì)電網(wǎng)頻率偏移的適應(yīng)性也更強(qiáng)[15].
PIR控制在共振頻率處有較大增益,通過選擇數(shù)值可擴(kuò)大頻率范圍.理論上,其能跟蹤所有的諧波階數(shù),但在實(shí)際控制中,其跟蹤的則是有限階數(shù)的諧波,且對(duì)周期性干擾的抵抗力較弱.
而反饋線性化理論是仿射非線性系統(tǒng)線性化與解耦控制的有力手段,雖在一定程度上運(yùn)算量會(huì)增大,但動(dòng)態(tài)性能及穩(wěn)定性更優(yōu).由UPFC等效電路可知,系統(tǒng)狀態(tài)變量為id、iq,控制輸入變量為Usd、Usq,則MMC-UPFC非線性系統(tǒng)表示為
(7)
式中:x為狀態(tài)量;w為控制輸入量;y為輸出量;f(x)和g(x)為量場(chǎng);h(x)為標(biāo)量函數(shù).
并聯(lián)側(cè)換流器的控制目標(biāo)是穩(wěn)定直流母線電壓及提供無(wú)功補(bǔ)償,其在dq坐標(biāo)系下的數(shù)學(xué)模型為
(8)
其中,選取輸入量為
(9)
狀態(tài)量為
(10)
輸出量為
(11)
對(duì)輸出量求導(dǎo)可得
(12)
y1和y2的關(guān)系度均為1,則有
(13)
A1(x)與E1(x)可表示為
(14)
(15)
構(gòu)造新的系統(tǒng)輸入變量v1與v2,則有
(16)

(17)
式(17)中各個(gè)系數(shù)的具體數(shù)值可由誤差分析方程求得,即
(18)

電流內(nèi)環(huán)采用SMC控制以減小參數(shù)變化和外部擾動(dòng)對(duì)反饋線性化模型的影響.SMC的設(shè)計(jì)主要包含滑模面的選取、等效控制律的求取等[16].
根據(jù)滑模理論,選取滑模面為
(19)
為了削弱抖振,常采用指數(shù)趨近律與飽和函數(shù)相結(jié)合的滑模控制律進(jìn)行控制,即
(20)
式中,k1、k2、ε1、ε2為趨近律系數(shù),且均為正數(shù).
聯(lián)立式(3)、(20)得
(21)
進(jìn)而可得滑模變結(jié)構(gòu)控制律為
(22)
則系統(tǒng)經(jīng)反饋線性化解耦之后的輸出控制律為
(23)
串聯(lián)側(cè)換流器的控制器設(shè)計(jì)同理,其控制律為
(24)
(25)
結(jié)合式(22)~(23)可得系統(tǒng)總體控制框架如圖4所示.并聯(lián)側(cè)換流器采用定直流電壓和無(wú)功補(bǔ)償控制;串聯(lián)側(cè)換流器則具有獨(dú)立調(diào)節(jié)有功和無(wú)功功率的能力,其外環(huán)為功率環(huán).通過比較功率的實(shí)際值與參考值,并經(jīng)PI調(diào)節(jié)后得到電流參考值,內(nèi)環(huán)為反饋線性化滑模控制.
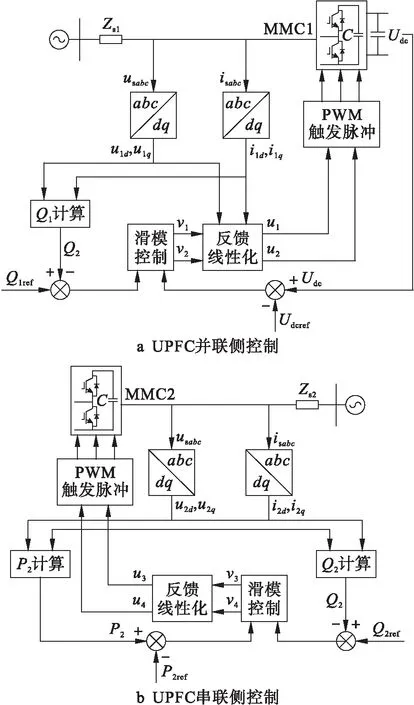
圖4 MMC-UPFC控制框架Fig.4 Control framework of MMC-UPFC
3 仿真結(jié)果與分析
使用MATLAB/Simulink對(duì)文中所提控制策略進(jìn)行仿真驗(yàn)證,所設(shè)置MMC-UPFC仿真模型的各參數(shù)如表1所示.
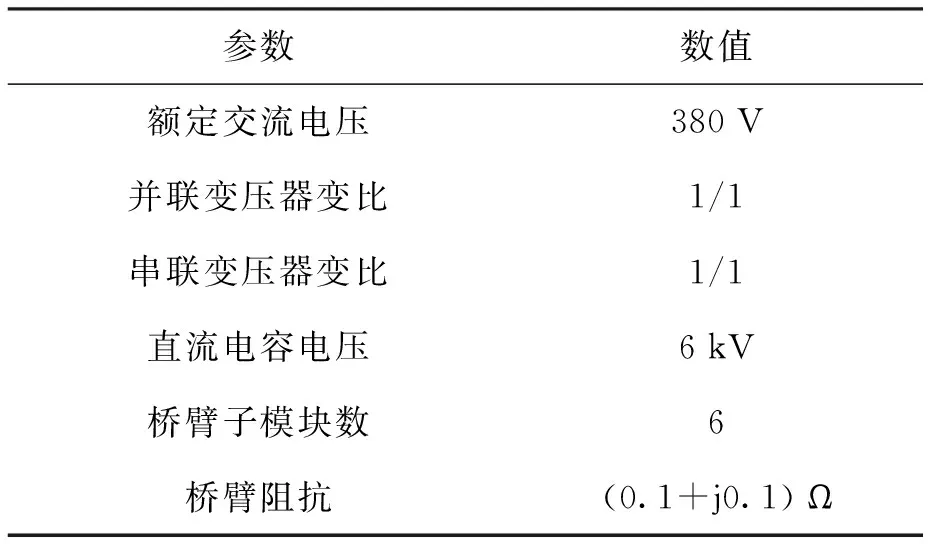
表1 系統(tǒng)參數(shù)設(shè)置Tab.1 System parameter settings
3.1 不平衡治理能力
導(dǎo)致電網(wǎng)電壓不平衡的主要原因:三相負(fù)荷不對(duì)稱、線路參數(shù)不對(duì)稱及非線性負(fù)載的出現(xiàn).
首先設(shè)定負(fù)荷阻抗不對(duì)稱,以模擬三相負(fù)荷不對(duì)稱時(shí)的不平衡治理能力.國(guó)家標(biāo)準(zhǔn)《電能質(zhì)量三相電壓不平衡》(GB/T 15543-2008)規(guī)定,電網(wǎng)正常運(yùn)行下負(fù)序電壓不平衡度應(yīng)不超過2%,短時(shí)則不得超過4%.而國(guó)標(biāo)《供配電系統(tǒng)設(shè)計(jì)規(guī)范》(GB50052-2009)規(guī)定,三相電流的不平衡度不得超過15%.
采用PIR控制方式的仿真結(jié)果如圖5所示.采用不平衡治理器,即反饋線性化滑模控制的仿真結(jié)果如圖6所示.
對(duì)比圖5與圖6可知,PIR參數(shù)經(jīng)調(diào)節(jié)優(yōu)化后,MMC-UPFC輸出波形仍有明顯畸變,魯棒性也較差;而反饋線性化滑模控制對(duì)線路不平衡有明顯抑制,故其輸出波形平滑且無(wú)明顯畸變.并聯(lián)換流器側(cè)三相電流的總諧波畸變THD分別由12.58%、12.55%、12.58%降低至3.40%、3.42%、3.42%,且其THD主要由二倍頻分量組成.而串聯(lián)側(cè)換流器電流不平衡度在加入滑模控制后大幅降低,由40%降低至5%,符合電力系統(tǒng)正常運(yùn)行下的要求.可見滑模變結(jié)構(gòu)控制能夠與反饋線性化有效互補(bǔ),從而提高系統(tǒng)的魯棒性.

圖5 PIR控制下的輸出波形Fig.5 Output waveforms of PIR control
從圖5c和圖6c中可以看出,采用PIR控制時(shí),橋臂電流受三相不平衡影響較為明顯,波形抖振的幅度較大;而加入滑模控制后,橋臂電流波形趨于三相正弦波,且振幅由8 A降低到2 A,進(jìn)一步驗(yàn)證了文中改進(jìn)控制策略的有效性.
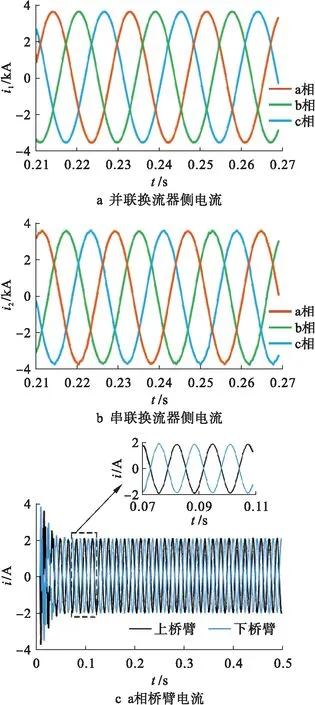
圖6 滑模控制下的輸出波形Fig.6 Output waveforms of sliding mode control
3.2 動(dòng)態(tài)響應(yīng)性能對(duì)比
潮流調(diào)節(jié)是MMC-UPFC的主要功能,改進(jìn)滑模與PIR控制下的功率響應(yīng)如圖7所示.圖7a中,線路有功功率的參考值保持5 MW不變,無(wú)功功率參考值在初始時(shí)刻從5 MVar躍變至3 MVar;而在圖7b中,無(wú)功參考值保持5 MVar不變,有功參考值在初始時(shí)刻從5 MW躍變至3 MW.
由圖7可以看出,采用PIR內(nèi)環(huán)控制時(shí)有功和無(wú)功功率互相之間的影響較大,當(dāng)有功和無(wú)功發(fā)生躍變實(shí)際值抖動(dòng)較大,并不能較好地跟蹤參考值,魯棒性較差.而加入滑模控制后,功率響應(yīng)超調(diào)量減小,且能夠更準(zhǔn)確地跟蹤功率參考值,進(jìn)而使系統(tǒng)的動(dòng)態(tài)性能增強(qiáng).
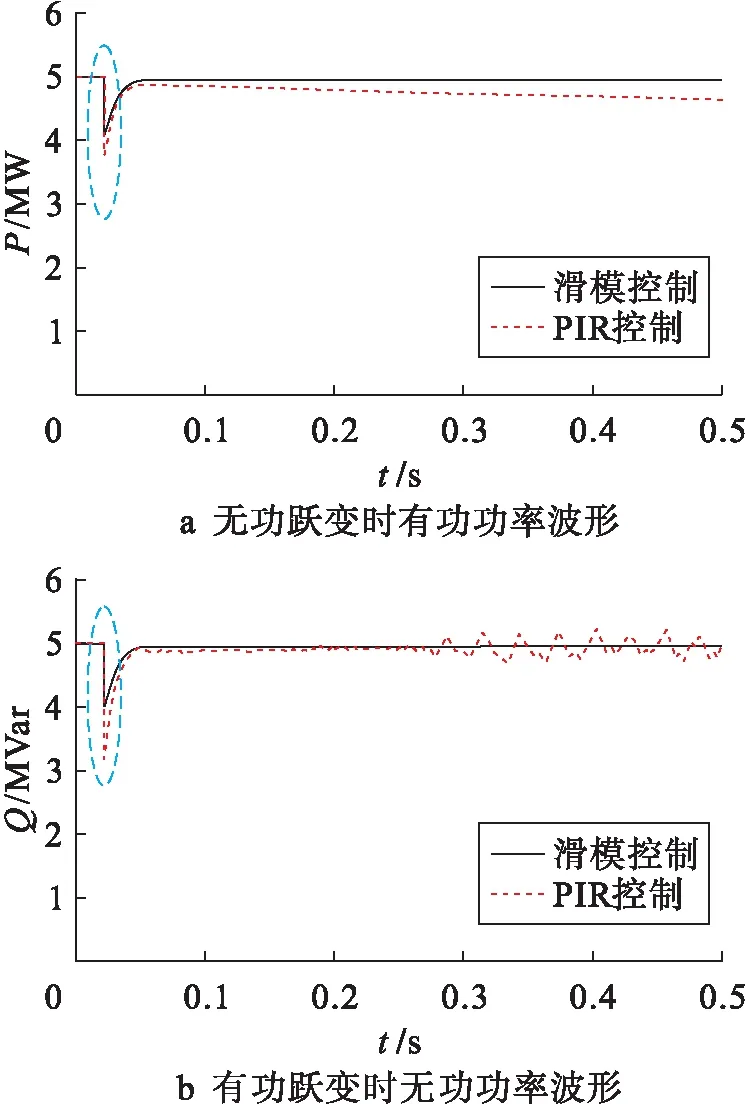
圖7 MMC-UPFC功率響應(yīng)Fig.7 Power response of MMC-UPFC
最終驗(yàn)證MMC-UPFC對(duì)于直流側(cè)電壓的調(diào)節(jié)能力,仿真結(jié)果如圖8所示.
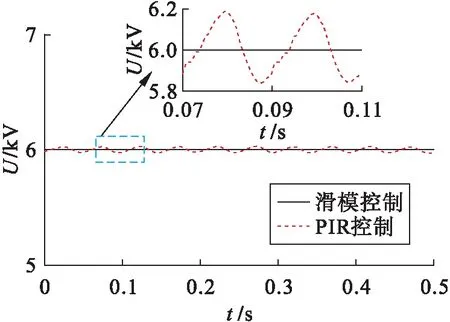
圖8 直流側(cè)電壓Fig.8 Voltage of DC side
由圖8可以看出,PIR控制下的直流側(cè)電壓存在較大的波動(dòng),振幅為0.2 kV;而加入滑模控制后可將直流側(cè)電壓穩(wěn)定在6 kV左右.本文所提控制策略能夠在電網(wǎng)電壓不平衡時(shí)更好地穩(wěn)定直流側(cè)電壓,達(dá)到基本的控制目標(biāo),魯棒性更好.
4 結(jié) 論
本文將反饋線性化理論與滑模控制相結(jié)合,將所設(shè)計(jì)算法應(yīng)用于MMC-UPFC系統(tǒng)內(nèi)環(huán)控制,并通過仿真實(shí)驗(yàn)驗(yàn)證了所提方法的可行性與有效性,得出結(jié)論如下:
1) 與傳統(tǒng)PI控制相比,反饋線性化能有效解決MMC-UPFC系統(tǒng)的非線性問題.但在控制器的設(shè)計(jì)上增加了一定量的代數(shù)運(yùn)算,且抗干擾能力差.
2) 改進(jìn)滑模控制對(duì)不平衡電網(wǎng)表現(xiàn)出了較好的治理能力,且其動(dòng)態(tài)性能良好,可減少系統(tǒng)調(diào)節(jié)時(shí)間和超調(diào)量.在電網(wǎng)出現(xiàn)不平衡等故障時(shí),能夠整體提高UPFC的性能及補(bǔ)償精度.
本文主要解決電網(wǎng)側(cè)的不平衡故障,例如負(fù)載不對(duì)稱等.而對(duì)于UPFC內(nèi)部故障,例如MMC內(nèi)部子模塊故障等問題,仍需進(jìn)一步地研究和探索,以期更好地?cái)U(kuò)大UPFC的使用范圍并提高其功率傳輸能力.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
 沈陽(yáng)工業(yè)大學(xué)學(xué)報(bào)2022年5期
沈陽(yáng)工業(yè)大學(xué)學(xué)報(bào)2022年5期
- 沈陽(yáng)工業(yè)大學(xué)學(xué)報(bào)的其它文章
- 尾礦砂水泥基復(fù)合材料的拉壓韌性
- 基于曲率模態(tài)信息熵和BP神經(jīng)網(wǎng)絡(luò)的簡(jiǎn)支梁損傷識(shí)別方法
- 基于數(shù)據(jù)驅(qū)動(dòng)的無(wú)線傳感器網(wǎng)絡(luò)擁塞控制
- 基于LSSVM的傳感器網(wǎng)絡(luò)安全風(fēng)險(xiǎn)預(yù)測(cè)與控制
- 基于混合蟻群的多溫區(qū)冷鏈物流配送路徑優(yōu)化算法
- 網(wǎng)絡(luò)數(shù)據(jù)中心IT設(shè)備人工智能化運(yùn)維應(yīng)用