卷積神經(jīng)網(wǎng)絡(luò)在流場(chǎng)重構(gòu)研究中的進(jìn)展1)
2022-10-05 07:20:08陳皓郭明明陳爾達(dá)鄧雪樂(lè)嘉陵李林靜
力學(xué)學(xué)報(bào) 2022年9期
陳皓 郭明明 田 野, 陳爾達(dá)鄧雪 樂(lè)嘉陵 李林靜
* (西南科技大學(xué)信息工程學(xué)院,四川綿陽(yáng) 621010)
? (中國(guó)空氣動(dòng)力研究與發(fā)展中心,四川綿陽(yáng) 621000)
引言
通常情況下,飛行器氣動(dòng)設(shè)計(jì)時(shí),通過(guò)實(shí)驗(yàn)或者計(jì)算流體力學(xué)(computational fluid dynamics,CFD)模擬獲得流場(chǎng)信息.CFD 通過(guò)對(duì)流場(chǎng)基本物理方程的高精度數(shù)值求解,在眾多應(yīng)用中發(fā)揮著越來(lái)越重要的作用[1].工程中常用的做法是: 通過(guò)實(shí)驗(yàn)或者CFD 計(jì)算獲得能包絡(luò)飛行軌跡的一組流場(chǎng)作為采樣流場(chǎng),再通過(guò)插值方法可以得到飛行軌跡的任意參數(shù)狀態(tài)的流場(chǎng)信息,例如升力系數(shù)、阻力系數(shù)、流場(chǎng)中某點(diǎn)的壓力(或者密度等)數(shù)據(jù)[2-3].然而,CFD 對(duì)網(wǎng)格質(zhì)量要求高、數(shù)值求解過(guò)程復(fù)雜、動(dòng)網(wǎng)格處理難度大導(dǎo)致計(jì)算耗費(fèi)大,限制了CFD 方法在諸如高精度氣動(dòng)優(yōu)化設(shè)計(jì)、氣動(dòng)伺服彈性、閉環(huán)流動(dòng)控制等多學(xué)科耦合建模與優(yōu)化等問(wèn)題中應(yīng)用[4-5].
本征正交分解理論(proper orthogonal decomposition,POD)[6]、動(dòng)模態(tài)分解(dynamic mode decomposition,DMD)[7]是經(jīng)典的數(shù)學(xué)方法,可以在保證流場(chǎng)結(jié)構(gòu)信息精度的前提下,將冗余信息忽略,從而大幅度降低計(jì)算問(wèn)題的自由度,減小模型預(yù)測(cè)的時(shí)間.羅杰等[8]以三段翼型流場(chǎng)作為研究對(duì)象,POD 降階模型分別與三次樣條插值和徑向基插值結(jié)合,實(shí)現(xiàn)設(shè)計(jì)狀態(tài)處流場(chǎng)信息快速預(yù)測(cè).然而,三次樣條插值與徑向基插值等假設(shè)插值對(duì)象是連續(xù)的,因此,當(dāng)流場(chǎng)信息隨狀態(tài)參數(shù)變化存在間斷(如激波現(xiàn)象)時(shí),流場(chǎng)預(yù)測(cè)結(jié)果在間斷區(qū)域會(huì)產(chǎn)生較大的誤差.侯強(qiáng)等[9]基于POD 理論和徑向基函數(shù)建立了高超聲速乘波前體流場(chǎng)結(jié)構(gòu)和氣動(dòng)性能參數(shù)的快速預(yù)測(cè)模型,并對(duì)擴(kuò)容設(shè)計(jì)的乘波前體流場(chǎng)開(kāi)展了快速預(yù)測(cè)研究.該研究表明基于本征正交分解理論的快速預(yù)測(cè)方法可精確、快速地獲得不同幾何設(shè)計(jì)參數(shù)下乘波前體的流場(chǎng),預(yù)測(cè)誤差不高于2%.李天一等[10]提出了Gappy POD 方法用于重構(gòu)湍流場(chǎng)數(shù)據(jù),并解釋了此方法重構(gòu)誤差的兩個(gè)來(lái)源.第一部分來(lái)自截?cái)嗾`差,當(dāng)流場(chǎng)復(fù)雜程度較低時(shí),應(yīng)當(dāng)采用增大POD 模態(tài)數(shù)目來(lái)減小截?cái)嗾`差,當(dāng)其復(fù)雜度較高時(shí),需要采用流場(chǎng)所有的 POD 模態(tài)進(jìn)行重構(gòu)以消除截?cái)嗾`差;第二部分來(lái)自 POD 基函數(shù)在已知點(diǎn)上的值組成的矩陣的非列滿(mǎn)秩性,它主要取決于破損區(qū)域的面積大小和幾何形狀,與其面積大小呈正相關(guān)性.張人會(huì)等[11]采用POD 方法對(duì)2 BE-203 型液環(huán)泵內(nèi)單個(gè)葉輪流道的氣液兩相流流場(chǎng)進(jìn)行了重構(gòu),精確地重構(gòu)了單個(gè)葉輪內(nèi)流場(chǎng)結(jié)構(gòu)的各個(gè)特征,除在氣液交界面附近有一定的誤差,整體預(yù)測(cè)結(jié)果具有較高的精度,大大減少了流場(chǎng)預(yù)估的計(jì)算量.但傳統(tǒng)模型降階方法也存在一些顯著的不足: 不適合或難以應(yīng)用于多尺度、瞬態(tài)過(guò)程、間斷過(guò)程,并且在發(fā)生移動(dòng)、縮放及旋轉(zhuǎn)變換時(shí)無(wú)法保證不變性[12].
與POD 和DMD 等方法相比,深度神經(jīng)網(wǎng)絡(luò)(deep neural network,DNN)則有望解決傳統(tǒng)降階方法所固有的缺點(diǎn).得益于當(dāng)前流體力學(xué)積累的大量數(shù)值模擬數(shù)據(jù)、實(shí)驗(yàn)測(cè)量數(shù)據(jù)以及現(xiàn)場(chǎng)監(jiān)測(cè)數(shù)據(jù),深度學(xué)習(xí)可以從大量的數(shù)據(jù)中挖掘出有用的信息[13]并擁有強(qiáng)大的非線(xiàn)性函數(shù)擬合能力.越來(lái)越多的研究者傾向于使用深度學(xué)習(xí)方法來(lái)預(yù)測(cè)物理模型周?chē)牧鲌?chǎng),并學(xué)習(xí)數(shù)值模擬中使用的方程.計(jì)算成本的顯著降低和模擬結(jié)果準(zhǔn)確性的提高顯示了深度學(xué)習(xí)方法在處理計(jì)算流體動(dòng)力學(xué)數(shù)據(jù)方面的潛力[14-15].本文將從以下五個(gè)章節(jié)進(jìn)行講解.第一節(jié)講解了深度學(xué)習(xí)的基本知識(shí);第二節(jié)調(diào)研了國(guó)內(nèi)外的流場(chǎng)超分辨率重構(gòu)的研究,包括傳統(tǒng)卷積神經(jīng)網(wǎng)絡(luò)與生成對(duì)抗網(wǎng)絡(luò)兩種結(jié)構(gòu)的超分辨率網(wǎng)絡(luò);第三節(jié)調(diào)研了基于特征信息的流場(chǎng)映射重構(gòu)研究;第四節(jié)調(diào)研了長(zhǎng)短期記憶神經(jīng)網(wǎng)絡(luò)對(duì)流場(chǎng)的重建;第五節(jié)得出結(jié)論并做了展望.
1 卷積神經(jīng)網(wǎng)絡(luò)的基本理論
卷積神經(jīng)網(wǎng)絡(luò)是深度學(xué)習(xí)主要方法之一,近年來(lái)已在流場(chǎng)重構(gòu)中得到廣泛應(yīng)用.卷積神經(jīng)網(wǎng)絡(luò)發(fā)展至今已出現(xiàn)許多經(jīng)典的網(wǎng)絡(luò)結(jié)構(gòu),例如文獻(xiàn)[16-20].這些網(wǎng)絡(luò)在圖像識(shí)別等領(lǐng)域表現(xiàn)出越來(lái)越好的效果,盡管結(jié)構(gòu)越來(lái)越復(fù)雜多變,但本質(zhì)上還是由卷積、激活、池化、全連接、殘差結(jié)構(gòu)等基本的元素組成.深度學(xué)習(xí)過(guò)程實(shí)際上是一個(gè)參數(shù)優(yōu)化問(wèn)題,通過(guò)定義損失函數(shù)作為網(wǎng)絡(luò)收斂的判據(jù),網(wǎng)絡(luò)不斷地學(xué)習(xí)所提供訓(xùn)練數(shù)據(jù)的特征,最終學(xué)習(xí)到的模型可用于解決實(shí)際工程中的預(yù)測(cè)、分類(lèi)等問(wèn)題.
1.1 卷積和激活
卷積操作是用一個(gè)卷積核矩陣在一個(gè)輸入圖像矩陣上面以一定的步長(zhǎng)進(jìn)行滑動(dòng),每次滑動(dòng)前計(jì)算卷積核矩陣中的權(quán)重參數(shù)與對(duì)應(yīng)的輸入圖像矩陣中的參數(shù)的乘積并相加,把每一次滑動(dòng)計(jì)算所得數(shù)據(jù)拼接起來(lái),最終組合成一個(gè)輸出特征矩陣,如圖1 所示.深度學(xué)習(xí)中激活函數(shù)有多種,例如: Tanh 函數(shù)、Sigmoid 函數(shù)、Softmax 函數(shù)及ReLU 等.激活函數(shù)一般用于卷積操作之后.激活函數(shù)的引入增加了網(wǎng)絡(luò)的非線(xiàn)性特性,增強(qiáng)了擬合能力.
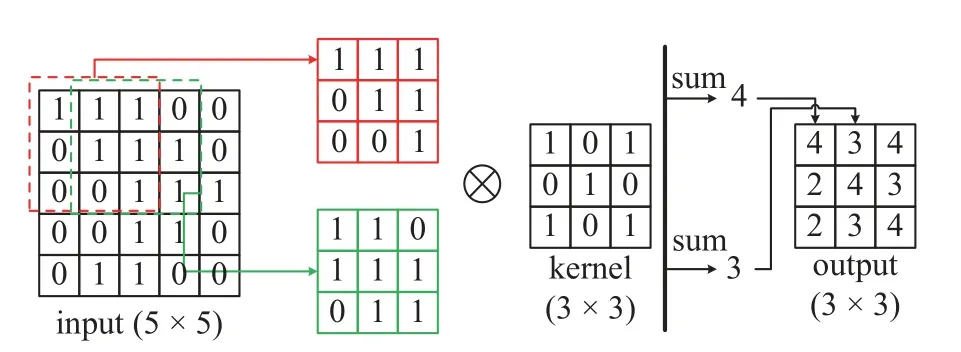
圖1 卷積Fig.1 Convolution
1.2 池化
池化相當(dāng)于對(duì)圖像進(jìn)行下采樣操作,通過(guò)利用某一位置相鄰輸出的整體統(tǒng)計(jì)特性來(lái)代替該位置的網(wǎng)絡(luò)輸出,起到下采樣的作用.池化可以有效減少參數(shù)數(shù)量,降低網(wǎng)絡(luò)復(fù)雜度.池化主要有兩種類(lèi)型,一種是最大池化下采樣,一種是平均池化下采樣,最常見(jiàn)的下采樣方式即最大池化下采樣.如圖2 所示.
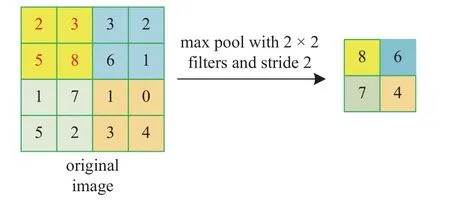
圖2 最大池化Fig.2 Maxpooling
1.3 全連接層
全連接層的輸入是一維數(shù)組,多維數(shù)組需先進(jìn)行一維化處理,然后連接全連接層.全連接層的每一個(gè)結(jié)點(diǎn)都與上一層的所有結(jié)點(diǎn)相連,用來(lái)把前邊提取到的特征綜合起來(lái).一個(gè)簡(jiǎn)單的兩層全連接圖結(jié)構(gòu)如圖3 所示.
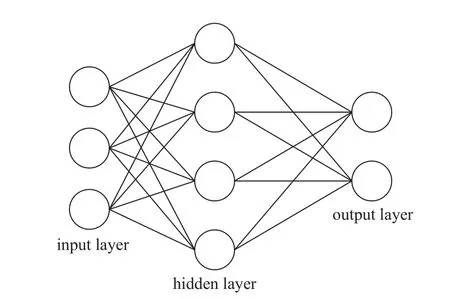
圖3 全連接層Fig.3 Full connection layer
1.4 殘差網(wǎng)絡(luò)
非常深的神經(jīng)網(wǎng)絡(luò)存在梯度消失和梯度爆炸問(wèn)題,難以訓(xùn)練.ResNet 采用跳躍連接,每?jī)蓪釉黾右粋€(gè)捷徑,構(gòu)成一個(gè)殘差塊,殘差結(jié)構(gòu)可以減小梯度消失、梯度爆炸的現(xiàn)象,結(jié)構(gòu)如圖4 所示.
殘差結(jié)構(gòu)主要包括兩種結(jié)構(gòu),第一種如圖4 中BasicBlock 模塊,采用兩個(gè)3×3 的卷積進(jìn)行串聯(lián);第二種如圖4 中Bottleneck 模塊,采用1×1 卷積,3×3 卷積,1×1 卷積進(jìn)行串聯(lián).對(duì)于ResNet 系列較淺層的模型,例如ResNet18,34,選用BasicBlock 模塊,對(duì)于ResNet44,50,101 等采用Bottleneck 模塊,首先,利用1×1 的卷積進(jìn)行通道降維;然后,進(jìn)行3×3 卷積操作,提取特征;最后,再利用1×1 的卷積恢復(fù)通道數(shù).通過(guò)1×1 的卷積,看似增加了模型結(jié)構(gòu)的復(fù)雜性,實(shí)則可以有效減少模型的計(jì)算量.
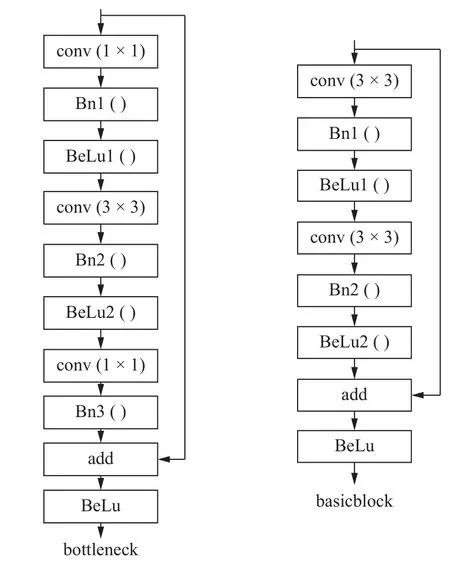
圖4 殘差結(jié)構(gòu)Fig.4 Residual structure
1.5 注意力機(jī)制
在認(rèn)知科學(xué)中,由于信息處理的瓶頸,人類(lèi)會(huì)選擇性地關(guān)注所有信息的一部分,同時(shí)忽略其他可見(jiàn)的信息,上述機(jī)制通常被稱(chēng)為注意力機(jī)制.在空間域上的應(yīng)用就是讓網(wǎng)絡(luò)去注意那些“顯眼”的地方,怎么去注意“顯眼”的地方呢?哪些地方又是屬于“顯眼”的呢?主要解決的就是這兩個(gè)問(wèn)題.一張圖片,把它劃分成幾塊,每一塊給定一個(gè)權(quán)重,權(quán)重大的地方就是“顯眼”的位置.
Woo 等[21]提出了卷積塊注意模塊CBAM,如圖5 所示,這是一個(gè)簡(jiǎn)單而有效的注意模塊,可以與任何前饋卷積神經(jīng)網(wǎng)絡(luò)集成.給定一個(gè)中間特征圖,模塊沿兩個(gè)單獨(dú)的維度(通道和空間)順序推斷注意力圖,然后將注意力圖乘以輸入特征圖以進(jìn)行自適應(yīng)特征細(xì)化.因?yàn)镃BAM 是一個(gè)輕量級(jí)的通用模塊,它可以無(wú)縫集成到任何CNN 架構(gòu)中,開(kāi)銷(xiāo)可以忽略不計(jì).該模塊可以與基礎(chǔ)CNN 一起進(jìn)行端到端的訓(xùn)練.Fei 等[22]提出了“residual attention network”,這是一種使用注意力機(jī)制的卷積神經(jīng)網(wǎng)絡(luò),它可以以端到端的訓(xùn)練方式與最先進(jìn)的前饋網(wǎng)絡(luò)架構(gòu)相結(jié)合.剩余注意力網(wǎng)絡(luò)是通過(guò)堆疊注意力模塊構(gòu)建的,這些注意力模塊會(huì)產(chǎn)生注意力感知功能.隨著層的深入,來(lái)自不同模塊的注意力感知特征會(huì)自適應(yīng)地變化.在每個(gè)“attention module”內(nèi)部,采用自下而上、自上而下的前饋結(jié)構(gòu),將前饋和反饋?zhàn)⒁膺^(guò)程展開(kāi)為單個(gè)前饋過(guò)程.重要的是,提出的注意力殘差學(xué)習(xí)來(lái)訓(xùn)練非常深的殘差注意力網(wǎng)絡(luò),該網(wǎng)絡(luò)可以很容易地?cái)U(kuò)展到數(shù)百層.
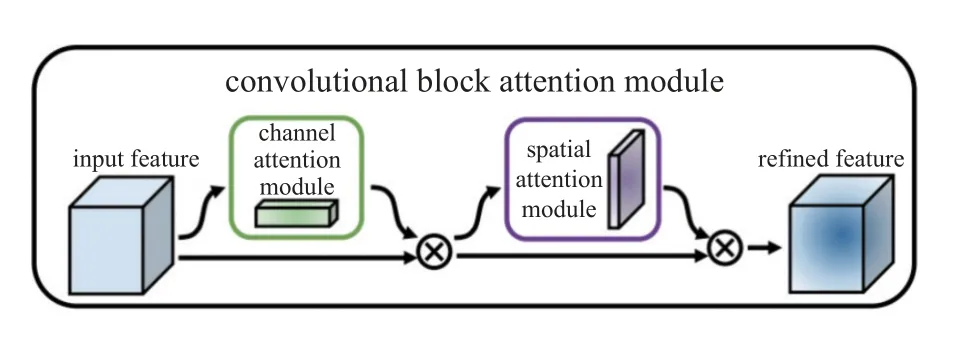
圖5 CBAM 結(jié)構(gòu)Fig.5 CBAM structure
2 流場(chǎng)數(shù)據(jù)超分辨率重建
2.1 基于超分辨率網(wǎng)絡(luò)的流場(chǎng)高質(zhì)量生成
2.1.1 超分辨率網(wǎng)絡(luò)簡(jiǎn)介
超分辨率技術(shù)(super-resolution,SR)是指從觀測(cè)到的低分辨率圖像重建出相應(yīng)的高分辨率圖像,在監(jiān)控設(shè)備、衛(wèi)星圖像和醫(yī)學(xué)影像等領(lǐng)域都有重要的應(yīng)用價(jià)值.超分辨率卷積神經(jīng)網(wǎng)絡(luò)(super-resolution convolutional neutral network,SRCNN)是深度學(xué)習(xí)用在超分辨率重建上的開(kāi)山之作.SRCNN[23]的網(wǎng)絡(luò)結(jié)構(gòu)非常簡(jiǎn)單,僅僅用了三個(gè)卷積層,網(wǎng)絡(luò)結(jié)構(gòu)如圖6 所示.SRCNN 首先使用雙三次(bicubic)插值將低分辨率圖像放大成目標(biāo)尺寸,接著通過(guò)三層卷積網(wǎng)絡(luò)擬合非線(xiàn)性映射,最后輸出高分辨率圖像結(jié)果.作者將三層卷積的結(jié)構(gòu)解釋成三個(gè)步驟: 圖像塊的提取和特征表示,特征非線(xiàn)性映射和最終的重建.
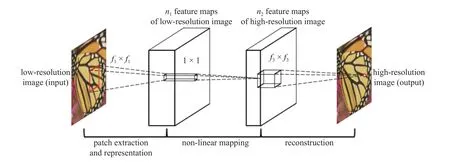
圖6 SRCNN 結(jié)構(gòu)Fig.6 SRCNN structure
Zhou 等[24]在基于正則化的SR 框架下,針對(duì)雙邊全變分BTV 超分辨率重建模型的不足,提出一種基于局部結(jié)構(gòu)自適應(yīng)BTV 正則化的超分辨率重建方法.該方法根據(jù)局部結(jié)構(gòu)自適應(yīng)地選擇先驗(yàn)?zāi)P秃驼齽t化參數(shù).實(shí)驗(yàn)結(jié)果表明,該方法能夠獲得較好的重構(gòu)效果,顯著減少了正則化參數(shù)選擇的人工工作量.Anwar 等[25]比較了30 多個(gè)最先進(jìn)的超分辨率卷積神經(jīng)網(wǎng)絡(luò)在三個(gè)經(jīng)典數(shù)據(jù)集和三個(gè)最近引入的具有挑戰(zhàn)性的數(shù)據(jù)集中的表現(xiàn),以對(duì)單張圖像的超分辨率進(jìn)行基準(zhǔn)測(cè)試,為基于深度學(xué)習(xí)的超分辨率網(wǎng)絡(luò)引入了一種分類(lèi)法,將現(xiàn)有方法分為九類(lèi),包括線(xiàn)性、殘差、多分支、遞歸、漸進(jìn)式、基于注意力和對(duì)抗性設(shè)計(jì),如圖7 所示,在網(wǎng)絡(luò)復(fù)雜性、內(nèi)存占用、模型輸入和輸出、學(xué)習(xí)細(xì)節(jié)、網(wǎng)絡(luò)損失的類(lèi)型和重要的架構(gòu)差異(例如深度、跳躍連接、過(guò)濾器)方面提供了模型之間的比較.
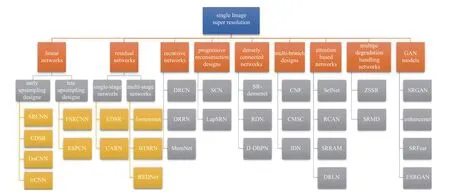
圖7 基于最顯著特征的現(xiàn)有單圖像超分辨率技術(shù)的分類(lèi)Fig.7 Classification of existing single image super-resolution technology based on the most salient features
線(xiàn)性網(wǎng)絡(luò)具有簡(jiǎn)單的結(jié)構(gòu),僅由沒(méi)有任何跳躍連接的信號(hào)流的單一路徑或多個(gè)分支組成.在這樣的網(wǎng)絡(luò)設(shè)計(jì)中,幾個(gè)卷積層相互堆疊,并且輸入按順序從初始層流向后面的層.線(xiàn)性網(wǎng)絡(luò)在上采樣操作的方式上有所不同,即早期上采樣或后期上采樣.DnCNN[26]直接學(xué)習(xí)預(yù)測(cè)高頻殘差而不是潛在的超分辨率圖像.殘差圖像基本上是低分辨率LR 和高分辨率HR 圖像之間的差異.DnCNN 的架構(gòu)非常簡(jiǎn)單,類(lèi)似于SRCNN,因?yàn)樗欢询B了卷積層、批量歸一化層和ReLU 層,盡管兩個(gè)模型都能夠得出有利的結(jié)果,但它們的性能在很大程度上取決于噪聲估計(jì)的準(zhǔn)確性,而不知道圖像中存在的底層結(jié)構(gòu)和紋理.此外,由于每個(gè)卷積層之后的批量歸一化操作,導(dǎo)致它們的計(jì)算成本很高.與線(xiàn)性網(wǎng)絡(luò)相比,殘差學(xué)習(xí)在網(wǎng)絡(luò)設(shè)計(jì)中使用跳躍連接來(lái)避免梯度消失,并使設(shè)計(jì)非常深的網(wǎng)絡(luò)變得可行.它的重要性首先在圖像分類(lèi)問(wèn)題中得到證實(shí).Lim 等[27]開(kāi)發(fā)了一種增強(qiáng)的深度超分辨率網(wǎng)絡(luò)EDSR,通過(guò)刪除傳統(tǒng)殘差網(wǎng)絡(luò)中不必要的模塊進(jìn)行的優(yōu)化,在穩(wěn)定訓(xùn)練過(guò)程的同時(shí),通過(guò)擴(kuò)大模型大小進(jìn)一步提高性能.為了在單個(gè)模型中能更魯棒性地重建不同放大因子的高分辨率圖像,文中還提出了一種新的多尺度深度超分辨率系統(tǒng)MDSR 和訓(xùn)練方法.Tai 等[28]提出一種非常深的CNN 模型(最多52 個(gè)卷積層),名為深度遞歸殘差網(wǎng)絡(luò)(deep recursive residual network,DRRN),旨在實(shí)現(xiàn)深度而簡(jiǎn)潔的網(wǎng)絡(luò).具體來(lái)說(shuō),采用全局和局部方式的殘差學(xué)習(xí),以減輕訓(xùn)練非常深的網(wǎng)絡(luò)的難度,遞歸學(xué)習(xí)用于在增加深度的同時(shí)控制模型參數(shù).通常CNN 算法一步預(yù)測(cè)出結(jié)果,但是,對(duì)于較大的比例因子較為困難,利用漸進(jìn)式重建設(shè)計(jì),分步式預(yù)測(cè).Lai 等[29]提出拉普拉斯金字塔超分辨率網(wǎng)絡(luò)LapSRN 來(lái)逐步重建高分辨率圖像的子帶殘差.在每個(gè)金字塔級(jí)別,將粗分辨率特征圖作為輸入,預(yù)測(cè)高頻殘差,并使用轉(zhuǎn)置卷積進(jìn)行上采樣到更精細(xì)的級(jí)別.該方法不需要雙三次插值作為預(yù)處理步驟,因此極大降低了計(jì)算復(fù)雜度.并且使用魯棒的Charbonnier 損失函數(shù)對(duì)提出的LapSRN 進(jìn)行深度監(jiān)督訓(xùn)練,并實(shí)現(xiàn)高質(zhì)量的重建.此外,文中通過(guò)漸進(jìn)式重建在一次前饋傳遞中生成多尺度預(yù)測(cè),從而促進(jìn)資源感知應(yīng)用.密集連接網(wǎng)絡(luò)結(jié)合沿網(wǎng)絡(luò)深度可用的分層線(xiàn)索,以實(shí)現(xiàn)高靈活性和更豐富的特征表示.Zhang 等[30]提出了用于圖像超分辨率的密集特征融合DFF.由于不同自然圖像中的相同內(nèi)容通常具有不同的尺度和視角,因此聯(lián)合學(xué)習(xí)分層特征對(duì)于圖像SR 至關(guān)重要,以局部和全局方式充分利用所有有意義的卷積特征,使用密集連接的卷積層來(lái)提取豐富的局部特征,使用局部特征融合來(lái)自適應(yīng)地從先前和當(dāng)前的局部特征中學(xué)習(xí)更有效的特征,在充分獲得密集的局部特征后,使用全局特征融合來(lái)聯(lián)合和自適應(yīng)地學(xué)習(xí)全局層次特征.該方法在定量和視覺(jué)上與最先進(jìn)的方法相比取得了良好的性能.Shi 等[31]為了實(shí)現(xiàn)在單個(gè)K2 GPU 上對(duì)1080 p視頻進(jìn)行實(shí)時(shí)SR 的卷積神經(jīng)網(wǎng)絡(luò),提出了一種新穎的CNN 架構(gòu),其中在LR 空間中提取特征圖.此外,還引入了一個(gè)高效的亞像素卷積層,它學(xué)習(xí)了一系列放大濾波器,以將最終的LR 特征圖放大到HR 輸出中.有效地為每個(gè)特征圖訓(xùn)練更復(fù)雜的升級(jí)過(guò)濾器替換了SR 管道中的手工制作的雙三次過(guò)濾器,同時(shí)還降低了整體SR 操作的計(jì)算復(fù)雜度.
以上的網(wǎng)絡(luò)設(shè)計(jì)認(rèn)為所有空間位置和通道對(duì)超分辨率具有統(tǒng)一的重要性.在某些情況下,它有助于選擇性地只關(guān)注給定層的少數(shù)特征.基于注意力的模型允許這種靈活性,并認(rèn)為并非所有特征對(duì)于超分辨率都是必不可少的,這些特征具有不同的重要性.文獻(xiàn)[32]受其他超分辨率方法中使用的線(xiàn)性映射技術(shù)的啟發(fā),將ReLU 重新解釋為單位映射和開(kāi)關(guān)的逐點(diǎn)乘法,最后提出了一種新的非線(xiàn)性單元,稱(chēng)為選擇單元SU.雖然傳統(tǒng)的ReLU 無(wú)法直接控制數(shù)據(jù)的傳遞,但所提出的SU 優(yōu)化了這種開(kāi)關(guān)控制,因此能夠以更靈活的方式比ReLU 更好地處理非線(xiàn)性功能,有效降低模型的計(jì)算復(fù)雜度.密集殘余拉普拉斯注意力網(wǎng)絡(luò)(dense residual Laplace attention network,DRLN)[33]被引入于超分辨率圖像.網(wǎng)絡(luò)結(jié)構(gòu)是模塊化和分層的,網(wǎng)絡(luò)的主要亮點(diǎn)是: (1) 模塊化架構(gòu);(2) 密集連接的殘差單元;(3) 級(jí)聯(lián)連接;(4) 拉普拉斯注意.DRLN 利用不同的連接方式.在每個(gè)塊中,三個(gè)殘差單元密集連接以學(xué)習(xí)緊湊表示;然后,在同一塊中使用拉普拉斯注意力對(duì)學(xué)習(xí)到的特征進(jìn)行加權(quán).目前,所有數(shù)據(jù)集的最佳結(jié)果由DRLN 提供.與RCAN[34]類(lèi)似,DRLN 采用L1 損失函數(shù)來(lái)訓(xùn)練網(wǎng)絡(luò).訓(xùn)練的設(shè)置與RCAN 相同,即訓(xùn)練塊大小、時(shí)期數(shù)、優(yōu)化器等.DRLN 的改進(jìn)可歸功于具有拉普拉斯注意和級(jí)聯(lián)結(jié)構(gòu)的創(chuàng)新模塊.與RCAN 相比,DRLN 的卷積層數(shù)顯著減少.而另一方面,DRLN 的參數(shù)數(shù)量更高;對(duì)于多重退化處理網(wǎng)絡(luò)僅僅考慮雙三次退化,在現(xiàn)實(shí)中可能不是一個(gè)可行的假設(shè),因?yàn)槎鄠€(gè)降級(jí)可能同時(shí)發(fā)生.現(xiàn)有的基于CNN 的SISR方法大多假設(shè)從高分辨率圖像中對(duì)低分辨率圖像進(jìn)行雙三次下采樣,因此當(dāng)真正的退化不遵循該假設(shè)時(shí),不可避免地會(huì)導(dǎo)致性能不佳.此外,它們?cè)趯W(xué)習(xí)單個(gè)模型以非盲目地處理多個(gè)降級(jí)方面缺乏可擴(kuò)展性.為了解決這些問(wèn)題,Zhang 等[35]提出了一個(gè)具有維度拉伸策略的通用框架,該框架使單個(gè)卷積超分辨率網(wǎng)絡(luò)能夠?qū)ISR 退化過(guò)程的兩個(gè)關(guān)鍵因素,即模糊核和噪聲水平作為輸入.因此,超級(jí)解析器可以處理多個(gè)甚至空間變化的降級(jí),大大提高了實(shí)用性.合成和真實(shí)LR 圖像的大量實(shí)驗(yàn)結(jié)果表明,所提出的卷積超分辨率網(wǎng)絡(luò)不僅可以在多次退化上產(chǎn)生良好的結(jié)果,而且計(jì)算效率高,為實(shí)際的SISR 應(yīng)用提供了一種高效且可擴(kuò)展的解決方案.多重退化的超分辨率網(wǎng)絡(luò)(super-resolution multiple degenerate network,SRMD)[36]采用連接的低分辨率圖像及其退化圖.SRMD 的架構(gòu)類(lèi)似于SRCNN[37],DnCNN[26],IRCNN[38].首先,將3×3 濾波器大小的卷積層級(jí)聯(lián)應(yīng)用于提取的特征,然后是一系列Conv,ReLU 和Batch 歸一化層.此外,類(lèi)似于ESPCN[31],使用卷積運(yùn)算來(lái)提取HR 子圖像,作為最后一步,將多個(gè)HR 子圖像轉(zhuǎn)換為最終的單個(gè)HR 輸出.SRMD直接學(xué)習(xí)HR 圖像,而不是圖像的殘差.
2.1.2 改進(jìn)的SRCNN 在流場(chǎng)超分辨率重建中的應(yīng)用
對(duì)高分辨率流動(dòng)數(shù)據(jù)的追求一直是實(shí)驗(yàn)和計(jì)算流體動(dòng)力學(xué)的主要追求之一.隨著高性能計(jì)算機(jī)和實(shí)驗(yàn)技術(shù)的進(jìn)步,研究人員更容易獲得高分辨率的流體數(shù)據(jù).實(shí)驗(yàn)流場(chǎng)測(cè)量,例如粒子圖像測(cè)速術(shù),可以捕捉湍流的復(fù)雜細(xì)節(jié).還能采用CFD 方法獲得高分辨率流場(chǎng).然而,實(shí)驗(yàn)和模擬方法仍然是昂貴且耗時(shí)的工作.Liu 等[39]提出了一個(gè)靜態(tài)卷積神經(jīng)網(wǎng)絡(luò)(static convolutional neural network,SCNN)和一個(gè)新穎的多時(shí)間路徑卷積神經(jīng)網(wǎng)絡(luò)(multi time path convolution neural network,MTPC)來(lái)重建高分辨率流場(chǎng).該方法與傳統(tǒng)的雙三次插值相比,有很明顯的提升.圖8 顯示了各向同性湍流的低分辨率、雙三次插值、SCNN、MTPC 和DNS (direct numerical simulation)結(jié)果的比較.
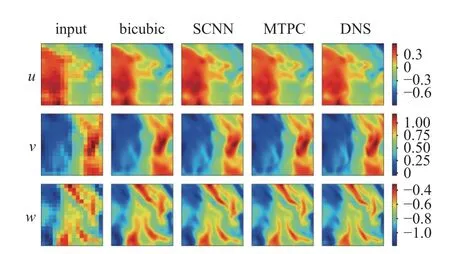
圖8 幾種超分辨率重建方法的對(duì)比Fig.8 Comparison of several super-resolution reconstruction methods
與之相似的工作,Kong 等[40]提出了一個(gè)超分辨率卷積神經(jīng)網(wǎng)絡(luò)(SRCNN)和一個(gè)多路徑超分辨卷積神經(jīng)網(wǎng)絡(luò)(multipath super-resolution convolutional neural network,MPSRC)用來(lái)實(shí)現(xiàn)超分辨溫度場(chǎng)的重構(gòu),并與雙三次插值法進(jìn)行了比較.結(jié)果表明,這兩種方法都可以大大提高超分辨率重建精度,而MPSRC 重建算法能夠以較低的均方誤差和較高的峰值信噪比提供較好的重建結(jié)果.其中一組重建結(jié)果比較如圖9 所示.該方法雖然取得了很大的進(jìn)步,但仍然存在一些挑戰(zhàn).例如,當(dāng)放大比例因子較大時(shí),超分辨率重建性能有一定程度的下降,這將是下一步工作需要研究的問(wèn)題.二維圓柱尾流被認(rèn)為是第一個(gè)展示整體超分辨率過(guò)程并展示其在層流數(shù)據(jù)上的能力的例子,Kai 等[41]開(kāi)發(fā)了兩種機(jī)器學(xué)習(xí)模型,即卷積神經(jīng)網(wǎng)絡(luò)和混合下采樣跳躍連接/多尺度模型.這些機(jī)器學(xué)習(xí)模型作為初步測(cè)試應(yīng)用于二維圓柱尾流,并顯示出從低分辨率流場(chǎng)數(shù)據(jù)重建湍流和層流的顯著能力.Ferdian 等[42]開(kāi)發(fā)了4DFlowNet能夠產(chǎn)生無(wú)噪聲的超分辨率4D 流動(dòng)圖像.快速計(jì)算的應(yīng)用十分廣泛,除了醫(yī)學(xué)中的流動(dòng)成像問(wèn)題,電影等視頻領(lǐng)域也希望能通過(guò)流體的快速計(jì)算達(dá)到逼真的視覺(jué)效果.
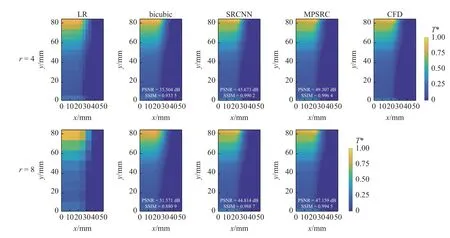
圖9 Bicubic,SRCNN,MPSRC 重建結(jié)果的對(duì)比Fig.9 Comparison of reconstruction results of Bicubic,SRCNN and MPSRC
Kong 等[43]研究單路徑模型采用簡(jiǎn)單的卷積層和全連接層串行架構(gòu),多路徑模型通過(guò)增加池化層來(lái)增加分支路徑,實(shí)現(xiàn)融合結(jié)構(gòu),其中多路徑的模型架構(gòu)如圖10 所示.并在各種工作條件下進(jìn)行超音速隔離段中流動(dòng)的地面實(shí)驗(yàn),以建立實(shí)驗(yàn)數(shù)據(jù)集.將訓(xùn)練后的單路徑和多路徑CNN 與傳統(tǒng)插值方法在流場(chǎng)SR 重建精度上進(jìn)行比較.結(jié)果如圖11 所示,單路徑CNN 具有一定的學(xué)習(xí)能力,但SR 精度不理想;多路徑CNN 顯著提高了流場(chǎng)SR 的準(zhǔn)確性,并且具有一個(gè)分支路徑的多路徑CNN,實(shí)現(xiàn)了最佳的SR 性能.
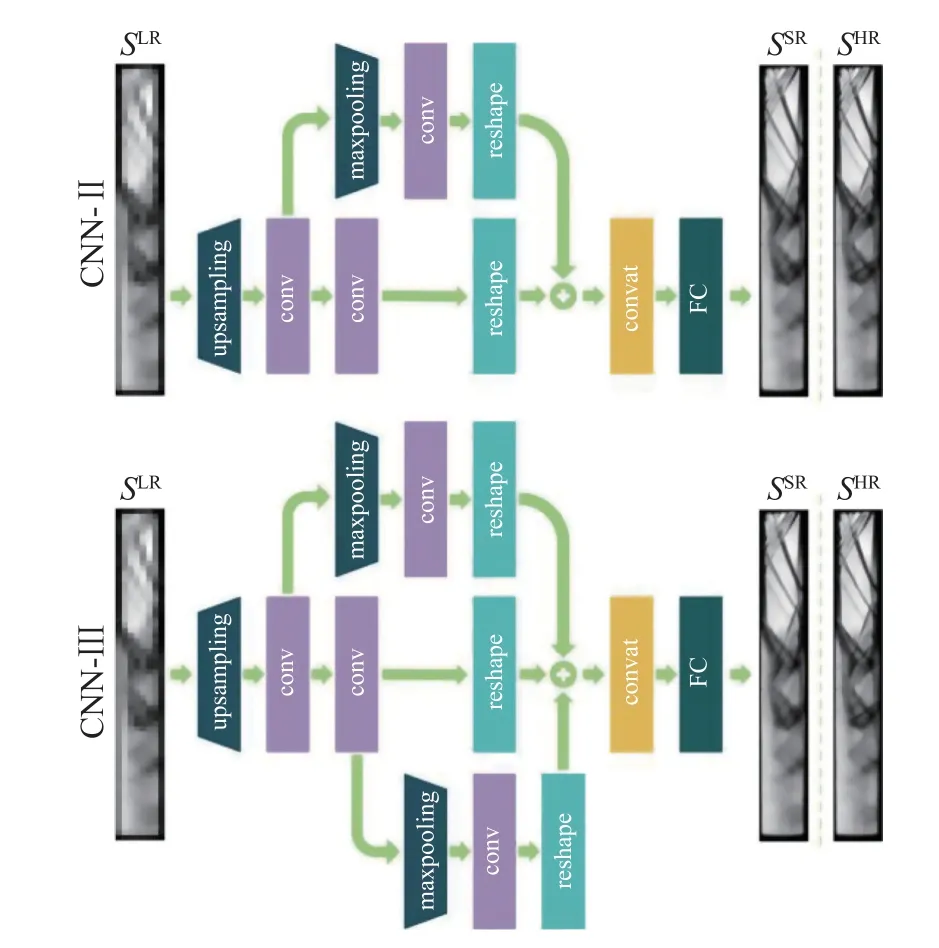
圖10 多路徑的模型架構(gòu)Fig.10 Multipath model architecture

圖11 模型重建和實(shí)驗(yàn)結(jié)果之間瞬時(shí)流場(chǎng)的比較: (a)楔角為0°,(b)楔角為14°,(c)楔角為20°Fig.11 Comparison of instantaneous flow field between model reconstruction and experimental results: (a) wedge angle of 0°,(b) wedge angle of 14° and (c) wedge angle of 20°
從圖12 中可以看出,傳統(tǒng)的插值只是簡(jiǎn)單的數(shù)據(jù)平滑.當(dāng)SR 因子較小(r=4)時(shí),基于插值法重建的SR 流場(chǎng)看起來(lái)比LR 流場(chǎng)更清晰,但實(shí)際上雙三次插值法只是機(jī)械地增加了像素密度,沒(méi)有添加新的SR 結(jié)果的流場(chǎng)詳細(xì)信息.當(dāng)SR 因子較大(r=8)時(shí),雙三次插值提供的流場(chǎng)過(guò)于平滑,SSIM 只有0.3 左右,非常低.輸入的LR 流場(chǎng)包含的信息較少,插值方法不具備學(xué)習(xí)能力,不能通過(guò)簡(jiǎn)單的像素平滑重建激波串結(jié)構(gòu).單路徑CNN (CNN-I)的SR 性能似乎優(yōu)于雙三次插值.超音速流場(chǎng)中的背景波基本重建清晰,但激波序列學(xué)習(xí)得不好,特別是當(dāng)SR因子較大時(shí)(r=8),激波串結(jié)構(gòu)完全被丟失,重建結(jié)果嚴(yán)重失真.CNN-I 具有一定的學(xué)習(xí)能力,但學(xué)習(xí)能力較弱,無(wú)法提供足夠的流場(chǎng)細(xì)節(jié),與簡(jiǎn)單插值相比,SSIM 和PSNR 略有提高,但仍遠(yuǎn)不能令人滿(mǎn)意.
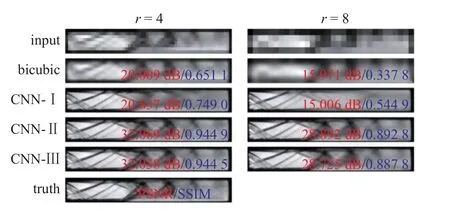
圖12 四種方法的重建結(jié)果Fig.12 Reconstruction results of four methods
2.2 基于生成對(duì)抗網(wǎng)絡(luò)的流場(chǎng)高質(zhì)量生成
2.2.1 生成對(duì)抗網(wǎng)絡(luò)簡(jiǎn)介
生成對(duì)抗網(wǎng)絡(luò) (generative adversarial nets,GAN)[44]實(shí)際上包含了2 個(gè)網(wǎng)絡(luò),一個(gè)是生成網(wǎng)絡(luò)(generator),另一個(gè)是判別網(wǎng)絡(luò)(discriminator).GAN 的終極目的是學(xué)習(xí)一個(gè)高質(zhì)量的生成器G,GAN 通過(guò)引入判別器D來(lái)得到高質(zhì)量的生成器G.G在訓(xùn)練過(guò)程中的目的是生成盡可能逼真的圖片去讓判別器判斷不了這張圖片到底是真實(shí)圖片還是生成的虛假照片,D在訓(xùn)練過(guò)程中的目的就是盡可能去辨別真假圖片,所以G是希望D的犯錯(cuò)率最大化,而D則是希望自己犯錯(cuò)率最小,二者互為對(duì)抗,在競(jìng)爭(zhēng)中共同進(jìn)步.理論上這種關(guān)系可以達(dá)到一個(gè)平衡點(diǎn),即所謂的納什均衡,也就是說(shuō)G生成的圖片D判別它為真實(shí)數(shù)據(jù)的概率是0.5,即現(xiàn)在判別器已經(jīng)無(wú)法區(qū)分生成器所生成的圖片的真假,那么生成器的目的也就達(dá)到以假亂真.GAN 的優(yōu)化目標(biāo)函數(shù)如式(1)所示其中x是先驗(yàn)概率分布Pz的一個(gè)噪聲樣本,x是一個(gè)服從特定分布Pdata 的一個(gè)真實(shí)樣本.
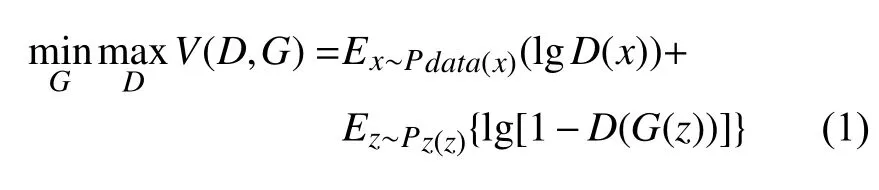
訓(xùn)練網(wǎng)絡(luò)D使得最大概率地分對(duì)訓(xùn)練樣本的標(biāo)簽(最大化lgD(x)和lg[1-D(G(z))],訓(xùn)練網(wǎng)絡(luò)G最小化lg[1-D(G(z))],即最大化D的損失.而訓(xùn)練過(guò)程中固定一方,更新另一個(gè)網(wǎng)絡(luò)的參數(shù),交替迭代,使得對(duì)方的錯(cuò)誤最大化,最終,G能估測(cè)出樣本數(shù)據(jù)的分布,也就是生成的樣本更加真實(shí).基本的GAN 結(jié)構(gòu)可以用圖13 表示.生成模型G: 可以是神經(jīng)網(wǎng)絡(luò)或者其他方式擬合出的一個(gè)函數(shù),給定輸入,負(fù)責(zé)生成整個(gè)GAN 所需的輸出.判別模型D: 可以當(dāng)作一個(gè)判斷輸入真假的二分類(lèi)器,也是一個(gè)函數(shù).
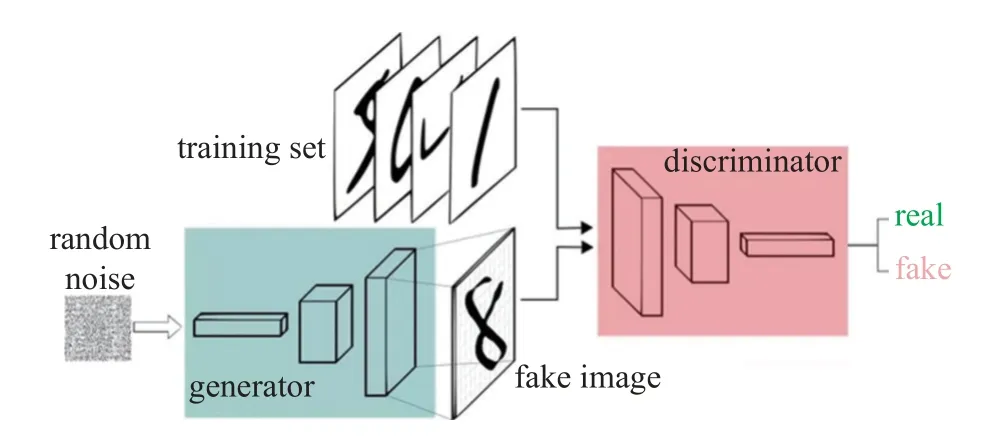
圖13 生成對(duì)抗網(wǎng)絡(luò)結(jié)構(gòu)Fig.13 Generate countermeasure network structure
2.2.2 改進(jìn)的GAN 在流場(chǎng)超分辨率重建中的應(yīng)用
在四維物理場(chǎng)的問(wèn)題中,生成對(duì)抗網(wǎng)絡(luò)同樣能夠?qū)α鲃?dòng)進(jìn)行處理.Xie 等[45]提出的TempoGAN 網(wǎng)絡(luò)在判別器的部分進(jìn)行了兩方面考慮,分別對(duì)空間和時(shí)間進(jìn)行了判別.這種方式能夠生成更詳細(xì)真實(shí)和時(shí)間一致的物理量.Xu 等[46]提出了一種數(shù)據(jù)驅(qū)動(dòng)的三維超分辨率方法,以沿著每個(gè)空間方向?qū)⒖臻g分辨率提高兩倍.該方法被稱(chēng)為3D 超分辨率生成對(duì)抗網(wǎng)絡(luò)(3D-SR-GAN),它構(gòu)建了一個(gè)生成器和一個(gè)鑒別器網(wǎng)絡(luò),以學(xué)習(xí)地形信息,并以給定的低分辨率“counterpart”推斷高分辨率的3D 湍流火焰結(jié)構(gòu).Lee 等[47]提出了模擬湍流小尺度特征的深度學(xué)習(xí)GAN 網(wǎng)絡(luò)方法.該方法有望在利用未處理的模擬數(shù)據(jù)、通過(guò)處理三維卷積實(shí)現(xiàn)三維結(jié)構(gòu)預(yù)測(cè)以及用更少的計(jì)算成本預(yù)測(cè)精確解方面具有新穎性.從時(shí)間的角度考慮,Liu 等[48]將深度學(xué)習(xí)引入到計(jì)算流體力學(xué)數(shù)據(jù)壓縮中,提出了一種新的基于GAN 的原位壓縮方法.利用計(jì)算流體力學(xué)數(shù)據(jù)中的小塊,訓(xùn)練了一個(gè)包含兩個(gè)神經(jīng)網(wǎng)絡(luò)的壓縮網(wǎng)絡(luò):負(fù)責(zé)在計(jì)算節(jié)點(diǎn)上壓縮數(shù)據(jù)的鑒別網(wǎng)絡(luò)和用于在可視化節(jié)點(diǎn)上重構(gòu)數(shù)據(jù)的生成網(wǎng)絡(luò).在訓(xùn)練階段,神經(jīng)網(wǎng)絡(luò)相互協(xié)作,同時(shí)進(jìn)行優(yōu)化,實(shí)現(xiàn)高質(zhì)量的數(shù)據(jù)壓縮和重構(gòu).該方法在壓縮時(shí)間上有很大的優(yōu)勢(shì),并且能夠根據(jù)可接受的重建效果來(lái)調(diào)整壓縮比.Deng 等[49]使用基于GAN 的人工智能框架從低空間分辨率流場(chǎng)開(kāi)發(fā)了超分辨率重建方法,結(jié)果證明了超分辨率生成對(duì)抗網(wǎng)絡(luò)SRGAN 和增強(qiáng)型的超分辨率生成對(duì)抗網(wǎng)絡(luò)ESRGAN 在湍流速度場(chǎng)超分辨率重建中的性能,對(duì)重建的瞬時(shí)流場(chǎng)、流動(dòng)統(tǒng)計(jì)量和空間相關(guān)性的分析表明,在復(fù)雜的流動(dòng)結(jié)構(gòu)中,兩種模型都可以準(zhǔn)確地重建高空間分辨率的流場(chǎng).速度場(chǎng)的空間分辨率可提高42倍和82倍.
然而,GAN 在訓(xùn)練中是非常困難的,并且可能收斂到局部極小值,在局部極小值處,生成的樣本不能捕獲訓(xùn)練數(shù)據(jù)的真實(shí)統(tǒng)計(jì),針對(duì)這種情況,Wu等[50]提出了一個(gè)嵌入統(tǒng)計(jì)約束的生成對(duì)抗網(wǎng)絡(luò),通過(guò)強(qiáng)制訓(xùn)練數(shù)據(jù)的協(xié)方差約束,產(chǎn)生了一個(gè)改進(jìn)的基于機(jī)器學(xué)習(xí)的仿真器來(lái)捕獲通過(guò)求解完全分解的偏微分方程生成的訓(xùn)練數(shù)據(jù)的統(tǒng)計(jì)量.研究表明,與標(biāo)準(zhǔn)GAN 相比,這種統(tǒng)計(jì)正則化帶來(lái)了更好的性能.文獻(xiàn)[51]使用4 種不同的深度學(xué)習(xí)網(wǎng)絡(luò)(考慮和不考慮守恒定律的生成對(duì)抗網(wǎng)絡(luò)和考慮和不考慮守恒定律的卷積神經(jīng)網(wǎng)絡(luò))訓(xùn)練和預(yù)測(cè)圓柱上的非定常流場(chǎng).通過(guò)對(duì)不同流態(tài)下圓柱周?chē)嵌ǔA鲌?chǎng)的研究,發(fā)現(xiàn)4 種深度學(xué)習(xí)網(wǎng)絡(luò)在短期預(yù)測(cè)時(shí)均可預(yù)測(cè)流量,但在長(zhǎng)期預(yù)測(cè)時(shí),是否考慮物理?yè)p失對(duì)預(yù)測(cè)結(jié)果產(chǎn)生了一定的影響.如何正確的向網(wǎng)絡(luò)中引入物理信息(例如質(zhì)量和動(dòng)量守恒的信息)是值得關(guān)注的問(wèn)題.Lin 等[52]針對(duì)傳統(tǒng)GAN 網(wǎng)絡(luò)難以收斂問(wèn)題提出了一種新的GAN 網(wǎng)絡(luò),生成網(wǎng)絡(luò)不再盡量去欺騙判別網(wǎng)絡(luò)而是尋找對(duì)應(yīng)關(guān)系的匹配問(wèn)題.與傳統(tǒng)的GAN 相比較,該方法在迭代收斂方面以及視覺(jué)檢測(cè)方面都是優(yōu)越的.
3 基于相關(guān)參數(shù)的流場(chǎng)映射重建
深度學(xué)習(xí)對(duì)被證明具有學(xué)習(xí)變量之間復(fù)雜非線(xiàn)性關(guān)系的能力,基于這種能力,研究人員做了許多基于相關(guān)參數(shù)重建相應(yīng)流場(chǎng)信息的工作.Kong 等[53]通過(guò)搭建一個(gè)雙路徑CNN 網(wǎng)絡(luò)成功學(xué)習(xí)到了超燃沖壓發(fā)動(dòng)機(jī)隔離段上下壁面壓力數(shù)據(jù)到隔離段內(nèi)流場(chǎng)紋影圖像的映射關(guān)系,重建效果如圖11 所示,并將此重建出來(lái)的流場(chǎng)用于激波串前緣位置的檢測(cè),結(jié)果表明通過(guò)深度學(xué)習(xí)重建出來(lái)的流場(chǎng)進(jìn)行激波前緣檢測(cè)的精度與效率優(yōu)于傳統(tǒng)的壓力增量法和壓力比法,并且能夠感知到激波跳躍現(xiàn)象.
除此工作之外,Kong 等[54]基于此CNN 網(wǎng)絡(luò)(圖14)利用隔離器上的壓力測(cè)量來(lái)重建超燃沖壓發(fā)動(dòng)機(jī)隔離段中的速度場(chǎng).在不同的馬赫數(shù)和背壓下對(duì)訓(xùn)練好的網(wǎng)絡(luò)模型進(jìn)行測(cè)試,結(jié)果表明該模型能夠高精度地重建速度場(chǎng).
圖14 速度場(chǎng)預(yù)測(cè)模型的CNN 網(wǎng)絡(luò)架構(gòu)Fig.14 CNN network architecture of velocity field prediction model
中國(guó)空氣動(dòng)力研究與發(fā)展中心在樂(lè)嘉陵院士的指導(dǎo)下開(kāi)展了深度學(xué)習(xí)在超燃沖壓發(fā)動(dòng)機(jī)燃燒流場(chǎng)重構(gòu)的研究,陳皓等[55]創(chuàng)新性的提出了一種多分支融合的卷積神經(jīng)(multi-branch fusion convolution neural network,MBFCNN)架構(gòu),如圖15 所示,針對(duì)于來(lái)流Ma2.5 的條件下,建立了不同當(dāng)量比的壁面壓力與燃燒流場(chǎng)紋影圖像同步對(duì)應(yīng)的數(shù)據(jù)集,結(jié)果表明訓(xùn)練好的模型可以準(zhǔn)確應(yīng)用壁面壓力重構(gòu)燃燒流場(chǎng),平均相關(guān)系數(shù)0.952 左右,驗(yàn)證了卷積神經(jīng)網(wǎng)絡(luò)在超聲速燃燒流場(chǎng)重構(gòu)的可能性.
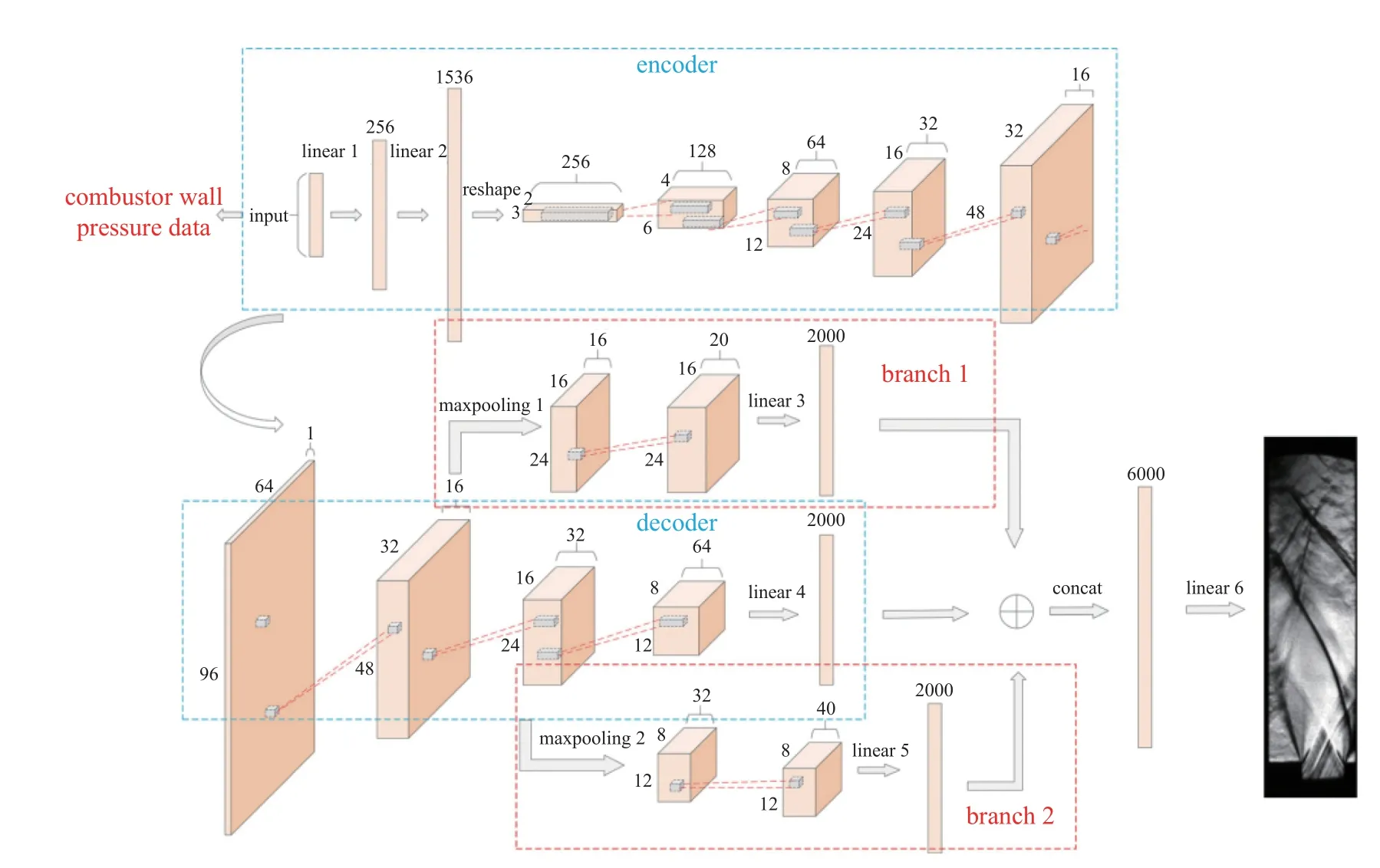
圖15 超聲速燃燒室流場(chǎng)重構(gòu)MBFCNN 模型架構(gòu)Fig.15 MBFCNN model architecture for flow field reconstruction in supersonic combustor
Marai 等[56]引入了一種深度學(xué)習(xí)方法來(lái)識(shí)別大規(guī)模張量場(chǎng)數(shù)據(jù)集中的激波位置,使用神經(jīng)網(wǎng)絡(luò)來(lái)學(xué)習(xí)從應(yīng)變張量到用作標(biāo)簽的紋影圖像的映射.研究表明這種方法可以用于快速預(yù)測(cè)二維和三維張量場(chǎng)的紋影值,潛在地允許張量流中的異常檢測(cè).Wang 等[57]對(duì)傳統(tǒng)的基于人工神經(jīng)網(wǎng)絡(luò)的流場(chǎng)重建方法進(jìn)行了改進(jìn),提出了一種陣列神經(jīng)網(wǎng)絡(luò)方法有效地預(yù)測(cè)未知的流場(chǎng)數(shù)據(jù).計(jì)算結(jié)果表明,陣列神經(jīng)網(wǎng)絡(luò)能夠比傳統(tǒng)方法更準(zhǔn)確地重構(gòu)目標(biāo)問(wèn)題的流場(chǎng),收斂速度明顯加快.Hadikhani 等[58]提出了一種通過(guò)光學(xué)監(jiān)測(cè)液滴流動(dòng)來(lái)測(cè)量微流控芯片中不同流體性質(zhì)的非侵入式方法,從液滴圖像中提取所需信息,并用于訓(xùn)練深度神經(jīng)網(wǎng)絡(luò)來(lái)預(yù)測(cè)流量或濃度,所提出的方法原則上可用于測(cè)量流體的其他性質(zhì),如表面張力和黏度.Bhatnagar 等[59]證明了CNN 能夠在最少的監(jiān)督下自動(dòng)檢測(cè)基本特征,在給定雷諾數(shù)、攻角和翼形的情況下能夠有效預(yù)測(cè)氣動(dòng)流場(chǎng)中的速度和壓力場(chǎng),并顯示出比RANS 解算器更快地有效估計(jì)速度和壓力場(chǎng)數(shù)量級(jí),使近實(shí)時(shí)研究翼型形狀和操作條件對(duì)氣動(dòng)力和流場(chǎng)的影響成為可能.Jin等[60]提出了一種數(shù)據(jù)驅(qū)動(dòng)模型,通過(guò)融合卷積神經(jīng)網(wǎng)絡(luò)CNNs 利用圓柱體上壓力系數(shù)的測(cè)量來(lái)預(yù)測(cè)圓柱體周?chē)乃俣葓?chǎng).研究發(fā)現(xiàn)該模型的預(yù)測(cè)結(jié)果與計(jì)算流體動(dòng)力學(xué)結(jié)果很好地一致(圖16),并且數(shù)據(jù)驅(qū)動(dòng)模型成功地學(xué)習(xí)了潛在的流動(dòng)狀態(tài),即尾流結(jié)構(gòu)和圓柱體表面上的壓力之間的關(guān)系被很好地建立.金曉威等[61]對(duì)物理增強(qiáng)的深度學(xué)習(xí)方法在流體力學(xué)降階模型、流動(dòng)控制方程求解問(wèn)題進(jìn)行了研究.他們介紹了如何將流體物理規(guī)律嵌入深度學(xué)習(xí)模型,發(fā)現(xiàn)物理融合的神經(jīng)網(wǎng)絡(luò)能夠加速計(jì)算流場(chǎng)重構(gòu)問(wèn)題,但其所逼近的流場(chǎng)無(wú)法嚴(yán)格滿(mǎn)足物理規(guī)律.如何改進(jìn)網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計(jì)使其逼近的流場(chǎng)自然滿(mǎn)足流體物理規(guī)律是需要進(jìn)一步解決的問(wèn)題.Hui 等[62]使用符號(hào)距離函數(shù)(signed distance function,SDF)結(jié)合CNN 的數(shù)據(jù)驅(qū)動(dòng)翼型壓力分布預(yù)測(cè)方法.在給定機(jī)翼幾何形狀的情況下,提出了一個(gè)用于預(yù)測(cè)氣動(dòng)性能的有監(jiān)督學(xué)習(xí)問(wèn)題,均方誤差結(jié)果小于2%,模型可以在幾秒鐘內(nèi)預(yù)測(cè)壓力系數(shù),比CFD 仿真快3 個(gè)數(shù)量級(jí).
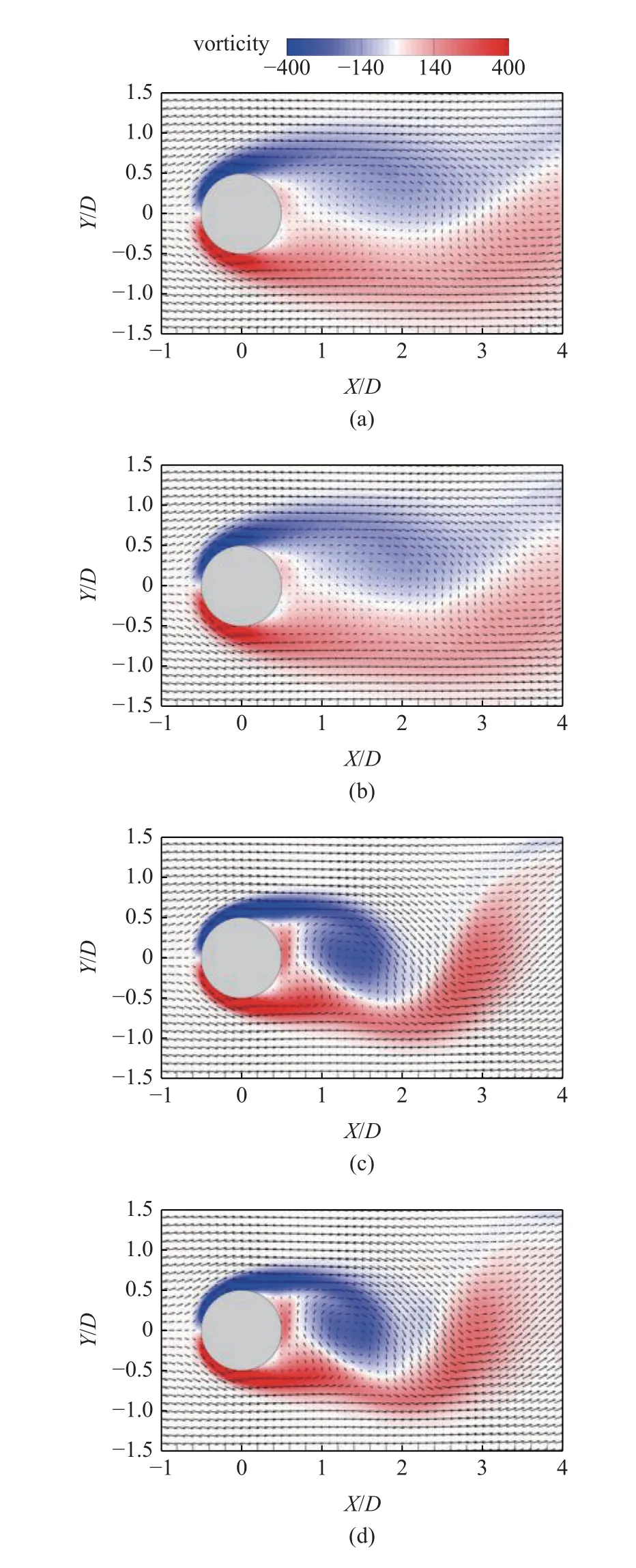
圖16 不同雷諾數(shù)的CFD 結(jié)果與模型預(yù)測(cè)值之間的瞬時(shí)流量比較Fig.16 Comparison of instantaneous flow between CFD results of different Reynolds numbers and model predicted values
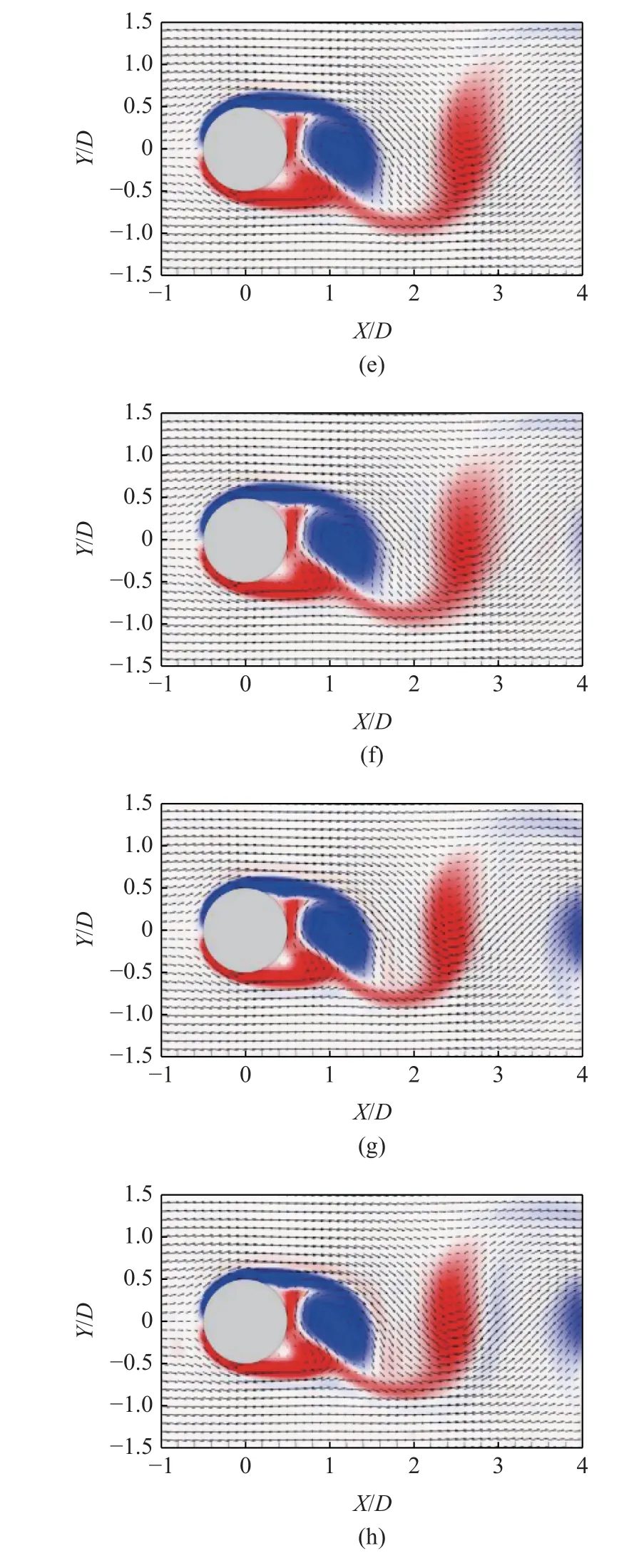
圖16 不同雷諾數(shù)的CFD 結(jié)果與模型預(yù)測(cè)值之間的瞬時(shí)流量比較(續(xù))Fig.16 Comparison of instantaneous flow between CFD results of different Reynolds numbers and model predicted values (continued)
針對(duì)流場(chǎng)預(yù)測(cè)與外形優(yōu)化設(shè)計(jì)問(wèn)題,Sekar 等[63]提出了一種基于深度卷積神經(jīng)網(wǎng)絡(luò)和深度多層感知器MLP 相結(jié)合的數(shù)據(jù)驅(qū)動(dòng)方法來(lái)預(yù)測(cè)翼型不可壓縮層流定常流場(chǎng).對(duì)流體在物體周?chē)鲃?dòng)的評(píng)估時(shí),Umetani 等[64-65]提出了一個(gè)機(jī)器學(xué)習(xí)框架,該框架可以預(yù)測(cè)給定三維形狀輸入的氣動(dòng)力、速度和壓力場(chǎng).提出的新的基于多管映射的參數(shù)化方法可以對(duì)設(shè)計(jì)和啟動(dòng)優(yōu)化進(jìn)行交互,對(duì)學(xué)習(xí)流動(dòng)的響應(yīng)十分快速.Guo 等[14]提出了一種基于CNNs 的二維或三維非均勻定常層流實(shí)時(shí)預(yù)測(cè)的通用、靈活的近似模型.研究表明,卷積神經(jīng)網(wǎng)絡(luò)可以估計(jì)速度場(chǎng),比GPU 加速的CFD 解算器快兩個(gè)數(shù)量級(jí),比基于CPU 的CFD 解算器快四個(gè)數(shù)量級(jí),且誤差率較低.這種方法可以在設(shè)計(jì)的早期階段為實(shí)時(shí)設(shè)計(jì)迭代提供即時(shí)反饋.Zhang 等[66]對(duì)多個(gè)CNN 結(jié)構(gòu)以及多層感知器進(jìn)行訓(xùn)練,預(yù)測(cè)在多個(gè)流動(dòng)馬赫數(shù)、雷諾數(shù)和不同迎角下具有各種形狀的翼型的升力系數(shù).研究表明所提CNN 模型在幾何表示的最小約束條件下具有競(jìng)爭(zhēng)性的預(yù)測(cè)精度.王怡星等[67]提出一種流場(chǎng)特征提取方法,主要采用Laplace 形式的偏微分方程生成流場(chǎng)網(wǎng)格,并將各網(wǎng)格點(diǎn)曲率值作為深度學(xué)習(xí)網(wǎng)絡(luò)輸入數(shù)據(jù),通過(guò)這種方法在一定程度上表達(dá)了邊界對(duì)周?chē)鲌?chǎng)造成的影響.何磊等[68]提出了多種機(jī)器學(xué)習(xí)方法并比較了這幾種方法的優(yōu)勢(shì)和不足之處,同時(shí),將流動(dòng)條件參數(shù)組成向量,再映射為圖像,與翼型圖像構(gòu)成“合成圖像”建立了基于翼型幾何圖像、來(lái)流馬赫數(shù)、迎角的翼型氣動(dòng)特性深度神經(jīng)網(wǎng)絡(luò)模型,得到了比較好的預(yù)測(cè)效果,拓展了氣動(dòng)特性深度學(xué)習(xí)建模方法的使用范圍.楊從新等[69]為克服計(jì)算流體力學(xué)方法計(jì)算成本高及無(wú)法重復(fù)利用計(jì)算結(jié)果的缺陷,基于深度學(xué)習(xí)方法,利用132 組二維流場(chǎng)數(shù)據(jù)建立NACA0018 翼型α=2°~8°,Re=1.0×105~1.6×106下壓力場(chǎng)、速度場(chǎng)的神經(jīng)網(wǎng)絡(luò)定常預(yù)測(cè)模型,將低速不可壓縮流動(dòng)能量守恒方程作為約束條件,考慮到翼型升阻力與表面壓力的相關(guān)性及流場(chǎng)靜壓與動(dòng)壓的關(guān)系,提出一種能間接約束翼型壓力場(chǎng)與速度場(chǎng)之間關(guān)系的激活函數(shù),與傳統(tǒng)的激活函數(shù)相比,改進(jìn)的激活函數(shù)因存在內(nèi)部間接約束,故在翼型速度場(chǎng)的預(yù)測(cè)中更準(zhǔn)確,流場(chǎng)過(guò)渡更均勻,并且神經(jīng)網(wǎng)絡(luò)方法通過(guò)保存模型可實(shí)現(xiàn)重復(fù)利用數(shù)值模擬結(jié)果目的,相比傳統(tǒng)CFD 方法數(shù)小時(shí)的計(jì)算,訓(xùn)練完成的神經(jīng)網(wǎng)絡(luò)只需要數(shù)秒即可得到計(jì)算結(jié)果,可極大地提升計(jì)算效率.惠心雨等[70]為了克服傳統(tǒng)CFD 效率低、成本高的缺陷,提出了一種基于深度學(xué)習(xí)的非定常周期性流場(chǎng)的預(yù)測(cè)框架,可以實(shí)時(shí)生成給定狀態(tài)的高可信度的流場(chǎng)結(jié)果.將條件生成對(duì)抗網(wǎng)絡(luò)與卷積神經(jīng)網(wǎng)絡(luò)相結(jié)合,改進(jìn)條件生成對(duì)抗網(wǎng)絡(luò)對(duì)生成樣本的約束方法,建立了基于深度學(xué)習(xí)策略,采用改進(jìn)的回歸生成對(duì)抗網(wǎng)絡(luò)模型,并與常規(guī)的條件生成對(duì)抗網(wǎng)絡(luò)模型的預(yù)測(cè)結(jié)果進(jìn)行對(duì)比.基于改進(jìn)的回歸生成對(duì)抗網(wǎng)絡(luò)的深度學(xué)習(xí)策略能準(zhǔn)確預(yù)測(cè)出指定時(shí)刻的流場(chǎng)變量,且總時(shí)長(zhǎng)比CFD 數(shù)值模擬減少至少1 個(gè)量級(jí).Zhao 等[71]提出了一種基于壓縮傳感的翼型表面壓力精細(xì)重構(gòu)方法,可以用較少的壓力測(cè)量數(shù)據(jù)高精度地重構(gòu)壓力分布.典型翼型亞音速繞流試驗(yàn)表明,由4~8 個(gè)測(cè)點(diǎn)重構(gòu)壓力積分后的升力和力矩精度可以滿(mǎn)足國(guó)家軍用標(biāo)準(zhǔn)的要求.該算法對(duì)噪聲具有較強(qiáng)的魯棒性,為工程中從稀疏表面壓力試驗(yàn)中獲取精確的力數(shù)據(jù)提供了新的思路.此外,Hu 和Zhang[72]提出一種新的卷積算子(Mesh-Conv),該算子允許CNN 在不需要對(duì)像素進(jìn)行預(yù)處理的情況下模擬流場(chǎng).數(shù)值實(shí)驗(yàn)表明,Mesh-Conv 算子比標(biāo)準(zhǔn)卷積算子具有更高的建模精度.模型預(yù)測(cè)的流場(chǎng)相關(guān)系數(shù)均在0.999 以上,不存在棋盤(pán)格現(xiàn)象.并且,Mesh-Conv 算子很容易擴(kuò)展到大多數(shù)現(xiàn)有的CNN 結(jié)構(gòu)中.
對(duì)于定常流場(chǎng)深度學(xué)習(xí)技術(shù),Ribeiro 等[73]提出了U-net 模型,該模型能成功從CFD 生成的真實(shí)數(shù)據(jù)中學(xué)習(xí)出不同幾何構(gòu)型周?chē)牧鲌?chǎng)信息,有效地逼近非均勻穩(wěn)定層流問(wèn)題的解.研究表明與CFD 方法相比速度提高了3 個(gè)數(shù)量級(jí).作者文中也提到引入物理約束是未來(lái)網(wǎng)絡(luò)模型的重要環(huán)節(jié).對(duì)于引入了物理約束的流場(chǎng)重構(gòu)工作,堯少波等[74]提出了融合Navier-Stokes (N-S)方程的PINN 神經(jīng)網(wǎng)絡(luò)模型,賦予了傳統(tǒng)神經(jīng)網(wǎng)絡(luò)所不具備的先驗(yàn)知識(shí)和可解釋性,研究結(jié)果證實(shí)了PINN 方法可為建立流動(dòng)物理模型提供工具和算法支撐.Raissi 等[75]將流體力學(xué)基本方程N(yùn)-S 方程引入損失函數(shù),實(shí)現(xiàn)對(duì)圓柱尾流流場(chǎng)以及顱內(nèi)動(dòng)脈瘤影像的生物流場(chǎng)重構(gòu),這一成果發(fā)表在國(guó)際頂級(jí)學(xué)術(shù)期刊Science上.其具體做法是通過(guò)自動(dòng)微分技術(shù)對(duì)網(wǎng)絡(luò)輸出變量求導(dǎo),并代入N-S 方程計(jì)算殘差,損失函數(shù)定義為傳統(tǒng)二范數(shù)誤差與這一殘差的和.預(yù)測(cè)結(jié)果表明訓(xùn)練過(guò)程所用到的損失函數(shù)確實(shí)提升了神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)效果.相關(guān)方法被同一作者應(yīng)用于渦致振動(dòng)的研究中,同樣顯示出了良好效果[4].
近年來(lái),基于降階模型的流場(chǎng)重構(gòu)同樣在基于參數(shù)的流場(chǎng)映射重建中取得良好的效果.文獻(xiàn)[76]提出了利用深度前饋神經(jīng)網(wǎng)絡(luò)(deep feedforward neural networks,DFNN)結(jié)合流動(dòng)模態(tài)分解構(gòu)建流體流動(dòng)的降階模型,應(yīng)用提出的方法對(duì)動(dòng)態(tài)失速下的湍流流場(chǎng)進(jìn)行了模擬,降價(jià)模型(reduced order models,ROMs)準(zhǔn)確捕捉了前緣失速渦和隨后的后緣渦的流動(dòng)動(dòng)力學(xué)特性,與傳統(tǒng)的稀疏回歸方法相比,DNN 方法能夠?qū)W習(xí)流動(dòng)的瞬態(tài)特征,并提供穩(wěn)定和準(zhǔn)確的長(zhǎng)期預(yù)測(cè).Hasegawa等[77]將卷積神經(jīng)網(wǎng)絡(luò)自編碼器(convolutional neural network autoencoder,CNN-AE) 和長(zhǎng)短時(shí)記憶(long short-term memory,LSTM)相結(jié)合,構(gòu)造了一種非定常流場(chǎng)降階模型的方法,利用直接數(shù)值模擬數(shù)據(jù)對(duì)CNNAE 進(jìn)行了訓(xùn)練,將高維流場(chǎng)數(shù)據(jù)映射到低維空間,應(yīng)用LSTM 網(wǎng)絡(luò)建立流場(chǎng)的時(shí)間預(yù)測(cè)系統(tǒng),應(yīng)用不同鈍體形狀的繞流驗(yàn)證了方法的有效性.H u等[78]針對(duì)現(xiàn)有的CFD 計(jì)算成本高導(dǎo)致獲取大規(guī)模數(shù)據(jù)的可行性差等問(wèn)題,提出了基于徑向基函數(shù)(radial basis functions,RBF)的生成對(duì)抗網(wǎng)絡(luò)方法(generative adversarial networks,GANs),開(kāi)展了流場(chǎng)重構(gòu)的研究,能夠從有限和稀疏的數(shù)據(jù)集高精度地重構(gòu)流場(chǎng),與基本的GANs 進(jìn)行流場(chǎng)重構(gòu)相比穩(wěn)定性提升了34.62%.Ma 等[79]提出了一種基于殘差網(wǎng)絡(luò)(residual neural network,ResNet)的非嵌入式流場(chǎng)重構(gòu)的降階模型,將本征正交分解與ResNet 結(jié)合,在NACA0012 翼型流動(dòng)、可壓縮的M6 機(jī)翼流動(dòng)和非定常圓柱繞流等典型試驗(yàn),獲得了比基于前饋神經(jīng)網(wǎng)絡(luò)(feedforward neural networks,FNN) 與POD 結(jié)合的非嵌入式降階模型更高的流場(chǎng)重構(gòu)精度.最近,Brahmachary 等[80]針對(duì)于高超聲速Busemann 進(jìn)氣道和三坡道進(jìn)氣道提出了一種內(nèi)流場(chǎng)快速預(yù)測(cè)的降階模型,應(yīng)用不同的設(shè)計(jì)變量通過(guò)拉丁超立方抽樣構(gòu)建樣本庫(kù),結(jié)合CFD 計(jì)算獲取了流場(chǎng)數(shù)據(jù),利用POD 對(duì)內(nèi)流場(chǎng)進(jìn)行降階,同時(shí)采用移動(dòng)最小二乘法的回歸模型和基于多層感知器的神經(jīng)網(wǎng)絡(luò)技術(shù)重構(gòu)流場(chǎng),試驗(yàn)結(jié)果表明應(yīng)用多層感知器的神經(jīng)網(wǎng)絡(luò)對(duì)降階后的內(nèi)流場(chǎng)數(shù)據(jù)能夠準(zhǔn)確估計(jì).上述研究證明了基于降階模型與神經(jīng)網(wǎng)絡(luò)結(jié)合的流場(chǎng)重構(gòu)方法在快速性和準(zhǔn)確性等方面具有一定優(yōu)勢(shì).
4 基于LSTM 的流場(chǎng)預(yù)測(cè)
4.1 LSTM 簡(jiǎn)介
對(duì)具有時(shí)間結(jié)構(gòu)信息的數(shù)據(jù)進(jìn)行建模時(shí),長(zhǎng)短期記憶[81]網(wǎng)絡(luò)具有良好的性能.網(wǎng)路結(jié)構(gòu)圖如圖17 所示.網(wǎng)絡(luò)主要由三個(gè)門(mén)結(jié)構(gòu)來(lái)控制狀態(tài): 遺忘門(mén)、輸入門(mén)和輸出門(mén).遺忘門(mén)主要是用來(lái)遺忘某些信息,輸入門(mén)用來(lái)保留部分新的信息,使用到tanh 激活函數(shù),最后就是輸出門(mén)了,這里使用到Sigmoid 激活函數(shù),表示輸出哪些內(nèi)容,而前面已被更新的狀態(tài)通過(guò)tanh 激活函數(shù)后與之相乘,這就是一個(gè)時(shí)間步長(zhǎng)的輸出了,由多個(gè)這樣的步長(zhǎng)共同組成了整個(gè)網(wǎng)絡(luò)結(jié)構(gòu).
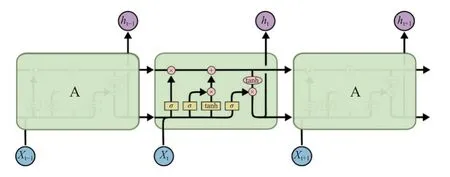
圖17 LSTM 結(jié)構(gòu)Fig.17 LSTM structure
4.2 LSTM 在流場(chǎng)預(yù)測(cè)中的應(yīng)用
針對(duì)非定常流動(dòng)具有時(shí)空特性同時(shí)變化的特點(diǎn)問(wèn)題,必須考慮時(shí)間效應(yīng),因此長(zhǎng)短期記憶網(wǎng)絡(luò)被廣泛采用.
文獻(xiàn)[82-84]將POD 降階方法與LSTM 網(wǎng)絡(luò)相結(jié)合成功預(yù)測(cè)了流場(chǎng)的變化.Huang 等[5]將最先進(jìn)的實(shí)驗(yàn)技術(shù)(即時(shí)間分辨體積層析成像)與深度學(xué)習(xí)算法CNN-LSTM 相結(jié)合,以快速預(yù)測(cè)三維火焰演變.湍流研究方面,Mohan 等[85]提出的CNN 與LSTM 混合網(wǎng)絡(luò)則展現(xiàn)出對(duì)時(shí)空特征的良好建模能力,同時(shí)作者也指出還需要進(jìn)一步的工作,以便在LSTM 模型中包含更多的物理約束和可解釋性.Li 等[86]設(shè)計(jì)了一個(gè)包含特殊卷積LSTM 層和卷積層的深度神經(jīng)網(wǎng)絡(luò)(ConvLSTM),如圖18 所示.該網(wǎng)絡(luò)可以通過(guò)超聲速葉柵的上游壓力場(chǎng)重建出下游壓力場(chǎng),在不同的背壓下對(duì)訓(xùn)練后的模型進(jìn)行測(cè)試,重建結(jié)果與計(jì)算流體力學(xué)吻合良好,特別是在識(shí)別激波位置變化和高精度識(shí)別三維流動(dòng)中復(fù)雜彎曲激波方面.此外,Li 等[87]提出了一種基于全卷積神經(jīng)網(wǎng)絡(luò)(FCNN)的時(shí)間序列預(yù)測(cè)結(jié)構(gòu)用于根據(jù)前一時(shí)刻的壁面壓力重構(gòu)超聲速葉柵的未來(lái)流場(chǎng).此網(wǎng)絡(luò)將卷積嵌入到長(zhǎng)短期記憶中,并在輸出層使用卷積操作代替以往使用的全連接操作.實(shí)驗(yàn)結(jié)果表明,所提出的網(wǎng)絡(luò)能準(zhǔn)確預(yù)測(cè)激波串前緣位置,最大相對(duì)誤差小于4.4%.并且提出雙向LSTM (BiLSTM)預(yù)測(cè)葉珊通道的壁面壓力,該模型能夠準(zhǔn)確地捕捉壁面壓力隨時(shí)間變化的非線(xiàn)性特征.本研究結(jié)果為后續(xù)確定流場(chǎng)穩(wěn)定裕度奠定了堅(jiān)實(shí)的基礎(chǔ).
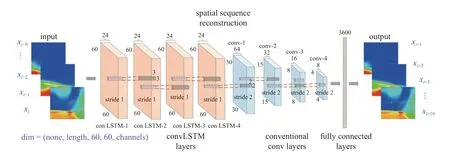
圖18 通過(guò)上游壓力場(chǎng)重建超聲速葉柵下游壓力場(chǎng)的ConvLSTM 結(jié)構(gòu)Fig.18 Reconstruction of convlstm structure of downstream pressure field of supersonic cascade through upstream pressure field
Han 等[88]設(shè)計(jì)了一種新的混合深度神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),直接從高維數(shù)值非定常流場(chǎng)數(shù)據(jù)中獲取非定常流動(dòng)的時(shí)空特征.混合DNN 由卷積神經(jīng)網(wǎng)絡(luò)、卷積長(zhǎng)短時(shí)記憶神經(jīng)網(wǎng)絡(luò)和反卷積神經(jīng)網(wǎng)絡(luò)組成.尹云飛等[89]針對(duì)現(xiàn)有的火災(zāi)煙氣流動(dòng)與溫度分布預(yù)測(cè)工作煩瑣、預(yù)測(cè)準(zhǔn)確度低的現(xiàn)狀,提出基于趨勢(shì)特征向量的火災(zāi)煙氣流動(dòng)與溫度分布預(yù)測(cè)模型的LSTM-TFV 算法,所提模型能夠抽取火災(zāi)時(shí)間序列數(shù)據(jù)中的趨勢(shì)特征,并將這些特征作為先驗(yàn)知識(shí)來(lái)加速和優(yōu)化深度神經(jīng)網(wǎng)絡(luò)的訓(xùn)練過(guò)程.本研究顯示了基于混合深度神經(jīng)網(wǎng)絡(luò)的降階模型在非定常流快速預(yù)測(cè)中的潛在能力.
5 結(jié)論
本文主要介紹了深度學(xué)習(xí)中各種不同類(lèi)型的卷積神經(jīng)網(wǎng)絡(luò)在流場(chǎng)重建中的應(yīng)用.流場(chǎng)重建可以分為流場(chǎng)超分辨率重構(gòu)、基于相關(guān)參數(shù)的流場(chǎng)映射重建、基于LSTM 的流場(chǎng)預(yù)測(cè).針對(duì)特定問(wèn)題進(jìn)行了分類(lèi)介紹,歸納了相關(guān)研究領(lǐng)域的進(jìn)展與成果.
(1)深度學(xué)習(xí)中圖像超分辨率技術(shù)已經(jīng)發(fā)展出大量的卷積神經(jīng)網(wǎng)絡(luò),相比于傳統(tǒng)的插值方法,這些網(wǎng)絡(luò)在流場(chǎng)重構(gòu)方面表現(xiàn)出更好的性能.相比于傳統(tǒng)的CFD 方法,這些網(wǎng)絡(luò)在流場(chǎng)重構(gòu)方面表現(xiàn)出速度上的優(yōu)勢(shì).基于改進(jìn)的SRCNN 在重構(gòu)指標(biāo)上面表現(xiàn)出優(yōu)異的性能,但從重構(gòu)的圖像上來(lái)看出現(xiàn)了平滑的現(xiàn)象.而改進(jìn)的GAN 則能夠重構(gòu)出流場(chǎng)中更多的紋理細(xì)節(jié),更加符合人眼的主觀感受.如何選擇合適的機(jī)器學(xué)習(xí)方法,需要結(jié)合研究的流場(chǎng)數(shù)據(jù)多尺度時(shí)空效應(yīng)來(lái)設(shè)計(jì)模型架構(gòu),進(jìn)而提高超分辨率算法的魯棒性和計(jì)算效率.
(2)通過(guò)流場(chǎng)的相關(guān)參數(shù)對(duì)流場(chǎng)進(jìn)行映射重建,其本質(zhì)是建立相關(guān)參數(shù)作為輸入、流場(chǎng)參數(shù)作為輸出的網(wǎng)絡(luò)模型.與CFD 等傳統(tǒng)計(jì)算方法相比較,卷積神經(jīng)網(wǎng)絡(luò)能夠加速基于流場(chǎng)的外形優(yōu)化計(jì)算.同時(shí),通過(guò)引入物理約束條件可以使得重構(gòu)效果更佳.
(3)具有時(shí)空特性的非定常流場(chǎng)的預(yù)測(cè)需要使用LSTM 結(jié)構(gòu)的卷積神經(jīng)網(wǎng)絡(luò)模型.此模型可以通過(guò)前一時(shí)間段的流場(chǎng)數(shù)據(jù)預(yù)測(cè)未來(lái)某一時(shí)段的流場(chǎng)數(shù)據(jù).模型中的卷積層部分捕捉流場(chǎng)的空間結(jié)構(gòu)特征并進(jìn)行降維處理,LSTM 結(jié)構(gòu)部分在保留流場(chǎng)空間結(jié)構(gòu)特征的同時(shí)捕捉流場(chǎng)的時(shí)間演化特征.
深度學(xué)習(xí)與流場(chǎng)重構(gòu)領(lǐng)域相關(guān)工作的結(jié)合正在逐漸發(fā)展,已經(jīng)取得了大量卓有成效的結(jié)果,但同時(shí)也面臨許多挑戰(zhàn).首先,解決不同的流場(chǎng)重構(gòu)問(wèn)題,使用合適的神經(jīng)網(wǎng)絡(luò)模型十分重要.沒(méi)有一個(gè)萬(wàn)能的網(wǎng)絡(luò)模型能夠適用于所有流場(chǎng)數(shù)據(jù).并且神經(jīng)網(wǎng)絡(luò)模型的訓(xùn)練調(diào)參是一個(gè)非常耗時(shí)的過(guò)程,這不僅需要計(jì)算機(jī)擁有強(qiáng)大的運(yùn)算能力,也需要大量的流場(chǎng)數(shù)據(jù)驅(qū)動(dòng).因此,標(biāo)準(zhǔn)流場(chǎng)數(shù)據(jù)集的建立對(duì)流場(chǎng)重構(gòu)的發(fā)展具有重要意義,這將有助于模型的檢驗(yàn)與改進(jìn),也有助于深度學(xué)習(xí)與流體力學(xué)學(xué)科之間的融合發(fā)展.其次,現(xiàn)有的深度學(xué)習(xí)流場(chǎng)重構(gòu)模型是基于可獲得的流場(chǎng)圖像數(shù)據(jù)發(fā)展的,在面對(duì)一些地面風(fēng)洞無(wú)法獲得流場(chǎng)圖像的工況下,如何基于已有工況的數(shù)據(jù)集,基于地面風(fēng)洞試驗(yàn)的多源數(shù)據(jù)進(jìn)行融合,結(jié)合遷移學(xué)習(xí)等方法,準(zhǔn)確重構(gòu)出流場(chǎng)是一種可工程化推廣的新趨勢(shì).最后,從文獻(xiàn)發(fā)展來(lái)看,目前研究主要是關(guān)心重構(gòu)出來(lái)的流場(chǎng)精確程度,但針對(duì)深度學(xué)習(xí)流場(chǎng)重構(gòu)的應(yīng)用場(chǎng)景研究還相對(duì)較少,如何發(fā)展輕量化的深度學(xué)習(xí)架構(gòu)模型,并基于FPGA、嵌入式開(kāi)發(fā)板等進(jìn)行硬件化設(shè)計(jì)與工程緊密結(jié)合,將流場(chǎng)實(shí)時(shí)重構(gòu)方法與流動(dòng)控制結(jié)合,可提升空天飛行器等在復(fù)雜多變的飛行環(huán)境過(guò)程智能化水平,避免傳統(tǒng)被動(dòng)控制的局限性.
當(dāng)前,深度學(xué)習(xí)在流場(chǎng)重構(gòu)中的研究更多的是應(yīng)用于經(jīng)典方法,如CNN,LSTM,ResNet,GANs 等,而新興的神經(jīng)網(wǎng)絡(luò)模型如針對(duì)圖像的Capsule[90]模型,針對(duì)序列問(wèn)題的Transformer[91]模型、Bert[92]模型,針對(duì)“non-uniform”數(shù)據(jù)的GNN[93]模型等在其他領(lǐng)域如遙感圖像檢測(cè)等方面取得了一定成效,但是在流場(chǎng)重構(gòu)方面研究成果較少,將其應(yīng)用于飛行器/發(fā)動(dòng)機(jī)的流場(chǎng)圖像智能解釋及重構(gòu)方面可能會(huì)進(jìn)一步取得新的成果.
此外,神經(jīng)網(wǎng)絡(luò)技術(shù)在計(jì)算流體力學(xué)方面也正逐步引起科研人員的廣泛關(guān)注和研究.當(dāng)前針對(duì)于飛行器外流的機(jī)器學(xué)習(xí)湍流模型研究較多,可以預(yù)見(jiàn)機(jī)器學(xué)習(xí)、CFD 及超級(jí)計(jì)算機(jī)的融合發(fā)展勢(shì)必會(huì)加速數(shù)值模擬計(jì)算速度,成為一種新的范式.首先,當(dāng)前基于數(shù)據(jù)驅(qū)動(dòng)的湍流不確定度量化及建模方法,有望針對(duì)于復(fù)雜流動(dòng)特定的工程問(wèn)題形成統(tǒng)一的湍流模型,可有效解決傳統(tǒng)的湍流模型參數(shù)較多是根據(jù)經(jīng)驗(yàn)或者人工反復(fù)調(diào)節(jié)的問(wèn)題.其次,流體力學(xué)數(shù)據(jù)驅(qū)動(dòng)的建模方法正處于探索階段,研究者應(yīng)更加關(guān)注可解釋性的深度學(xué)習(xí)技術(shù),而不僅是建立一個(gè)湍流代理的黑箱模型,為了提升神經(jīng)網(wǎng)絡(luò)的可解釋性和泛化性,需要考慮基于物理特性的湍流建模方法,這些物理特性主要包括多樣化的幾何構(gòu)型、湍流模型的時(shí)空特征、激波與激波/邊界層的相互作用等,目前通過(guò)在神經(jīng)網(wǎng)絡(luò)的損失函數(shù)中引入流體力學(xué)物理方程對(duì)提升精度來(lái)說(shuō)是一個(gè)較好的辦法,這同時(shí)也增加了傳統(tǒng)神經(jīng)網(wǎng)絡(luò)所不具備的先驗(yàn)知識(shí)和可解釋性,物理約束的引入是未來(lái)深度學(xué)習(xí)技術(shù)與流體力學(xué)融合發(fā)展的趨勢(shì).最后,深度學(xué)習(xí)需要大量的數(shù)據(jù),計(jì)算流體力學(xué)受限于數(shù)據(jù)獲取的高昂價(jià)值的缺陷,如何發(fā)展小樣本的神經(jīng)網(wǎng)絡(luò)流動(dòng)建模方法是工程上可以廣泛推廣的重要研究方向.
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
