基于重疊網格的大型船舶縱向航態與阻力數值預報
2022-10-02 08:29:18王家宏王偉軍艾萬政
科技創新與應用 2022年27期
王家宏,王偉軍,艾萬政
(浙江海洋大學,浙江 舟山 316022)
隨著船舶大型化和快速化的發展,對船舶的各項性能提出了更高的要求,船舶阻力是船舶的主要性能,是船舶水動力性能研究的重點和難點之一,船舶阻力的準確預報對船舶性能評價、船型設計與優化有著重要意義。隨著計算機技術的發展,數值模擬法成為船舶阻力預報的重要手段。數值模擬法包括勢流理論流體力學(Computational Fluid Dynamics,CFD)方法。由于勢流理論不考慮流體黏性,在計算復雜流場時存在偏差,因此CFD方法應用的越來越廣。Choi[1]、鄭小龍[2]和胡俊明[3]等通過數值計算與試驗數據的對比,表明CFD方法可以滿足工程精度。雖然計算精度較高,但是沒有考慮船舶航行時的船舶姿態。隨著船舶大型化和快速化的發展,固定狀態下的數值模擬方法已經不能滿足大型船舶在高弗汝德數(Fn)范圍內的阻力預報。
本文采用雷諾平均方程(Reynolds Averaged Navier-Stokes,RANS),結合重疊網格(Overset Mesh)技術和動態流體-物體相互作用(Dynamic Fluid Body Interaction,DFBI)方法,對KCS(KRISO Container Ship)集裝箱船進行了縱向航態與阻力預報研究。所得數值模擬結論與物理模型試驗結果吻合度較高,表明該方法預報船模阻力及姿態具有良好的精度,并且簡單高效,具有重要的工程實用價值。
1 模擬對象
本文的研究對象為KCS標準集裝箱船,是國際拖曳水池協會(International Towing Tank Conference,ITTC)推薦的數值計算船型之一。此船型具有大量公開的試驗數據可供檢驗和驗證,本文所用試驗數據來源于Tokyo CFD研究會和SIMMAN研究會。為與試驗數據進行對比,本文采用縮尺比為λ=31.6的模型,模型附帶舵。模型如圖1所示,具體參數見表1。
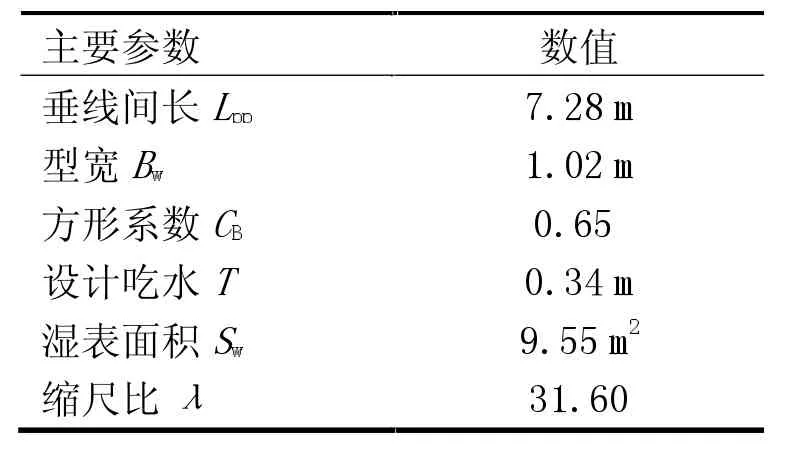
表1 船舶參數
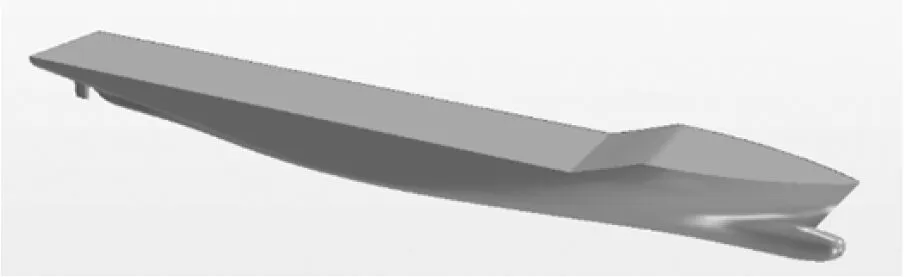
圖1 船體幾何模型
2 數值模型及網格安排
2.1 計算模型
RANS模型的控制方程組,包括質量守恒方程(即連續性方程)、動量守恒方程。RANS模型的不可壓縮控制方程組無量綱張量形式如下
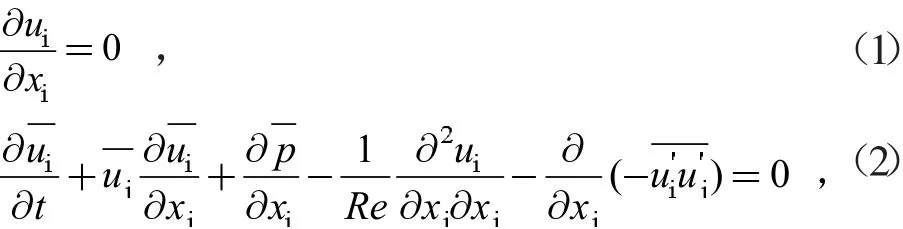
式中:ui為雷諾平均速度分量;P為壓強;t為時間;ui’為脈動速度;Re為雷諾數;xi和xj分別為二維空間中的距離變量。
自由液面采用流體體積法VOF(Volume of Fluids)方法進行捕捉。
船舶在水中航行時,船體的升沉和縱傾會發生變化,對阻力的準確預報有重要影響,因此本文放開船體升沉和縱傾2個自由度。
在計算過程中,船舶的航行姿態根據其垂直方向受力變化和y軸方向力矩變化進行實時調整。重疊域中的網格在背景域中進行平移和旋轉,主要依據是船體升沉、縱傾。背景域網格不動的好處是,可以有效避免網格變形及重構問題,相對而言,計算量減小,有利于數值模擬收斂。
2.2 邊界條件和計算域設置
本文計算采用半個KCS模型,計算時采用對稱邊界條件,以船模中縱剖面為對稱面。為避免計算域邊界對計算的影響,本文根據以往研究者的經驗[4],計算域入口在船首上游1.5Lpp,出口在船尾下游2.5Lpp,側面距離船側2Lpp,頂部距離自由液面1.5Lpp,底部距離船底表面2Lpp處,計算域設置如圖2所示。

圖2 計算域設置
2.3 網格劃分
計算域的網格劃分對船舶CFD計算有重要影響,船體在水中的總阻力主要包括摩擦阻力、剩余阻力。船體表面網格的設計會影響到摩擦阻力的計算;而船體周圍網格、水線面網格及近壁面網格設置會影響到剩余阻力的計算。本文設計的網格技術是運用重疊網格。計算區域包括2部分,即背景區域及重疊區域。關于體網格,采用切割體網格。為了能捕捉到自由液面和船舶周圍的流場信息,在自由液面區域和網格重疊區域采用了網格局部加密技術。關于船體周圍的邊界層,采用了棱柱層網格來劃分,在流場較復雜的區域,如船首、船尾等區域,也進行局部網格加密,以捕獲較詳細的流動細節。
Realizablek-ε湍流模型對近壁面流場的處理采用壁面函數法,需要檢查第一層網格節點布置,y+是第一層網格質心到壁面的無量綱距離,對于Realizablek-ε湍流模型,一般認為30~60為合理。經過對近壁面邊界層網格的多次調整,y+值處于30~60,網格如圖3所示,總體網格量約75萬。邊界條件設置見表2。
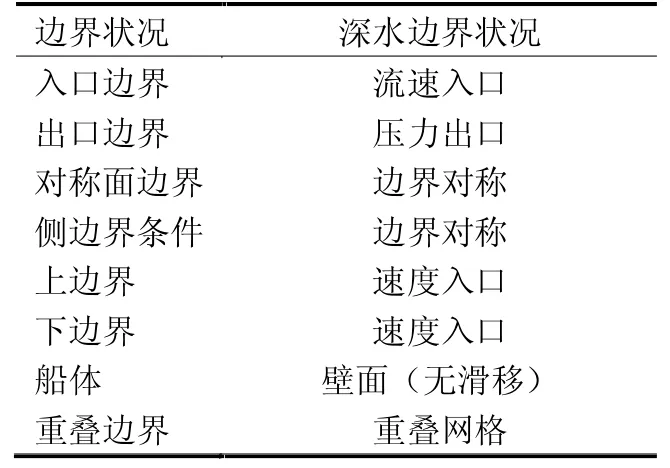
表2 邊界條件情況
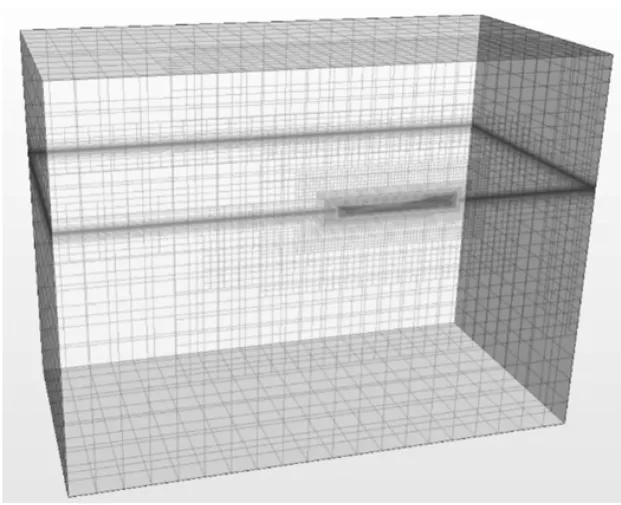
圖3 計算域網格
重疊域與背景域之間網格尺寸越接近差值求解精度越高,因此在背景域與重疊域耦合區域,進行網格加密,使該區域網格與重疊域網格尺寸接近。
3 計算結果分析
航行姿態對大型船舶阻力有重要影響。為了研究這一問題,本文分別對KCS船約束模型和自由模型在不同航行速度下的阻力進行了數值模擬計算,其中約束模型沒考慮船舶的航行狀態,而自由模型卻考慮了船舶的航行狀態。將數值模擬結果和物理模型試驗結果進行對比。試驗值為2015年Tokyo研討會[5]上提供的試驗結果,弗汝德數選取0.108、0.152、0.195、0.227、0.260、0.282,結果如圖4所示。
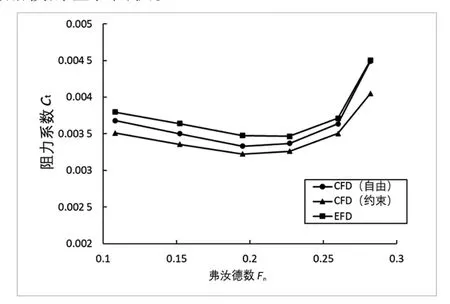
圖4 總阻力系數對比
船舶總阻力系數Ct表達式為

式中:Rt為船舶總阻力;U為船模速度;ρ為水密度;Sw為船模的濕表面積。
通過圖中數據對比可以看出,與約束模型的阻力計算結果相比,自由模型的阻力計算結果與試驗結果更加接近,在較高雷諾數時,精度更高。選取Fn=0.260時的2種模型的沿船身浪高曲線與試驗值進行對比,如圖5所示。
從圖5中可以看出,航行于水面的船舶由于航行時產生興波,沿船體會產生波高差。在約束模型和自由模型下數值模擬得到的沿船身浪高曲線與試驗值相差不大,但自由模型得到的結果與試驗值更為接近,說明自由模型模擬的航態能更接近試驗中船模的航態。
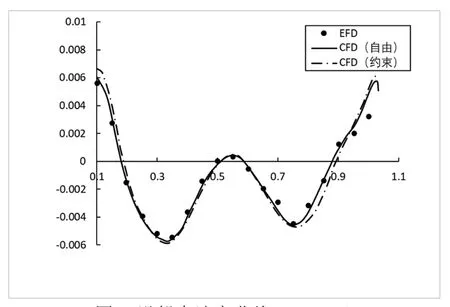
圖5 沿船身浪高曲線(Fn=0.260)
通過自由模型和約束模型數值結果的對比,可以看出航態對于船舶阻力的準確預報有很大影響,在預報船舶阻力時,船舶航態不可忽略。
采用自由模型,在船舶初始平吃水狀態時,對不同航速下的縱傾和下沉量進行了模擬,采用非定常計算,并將模擬得到的縱傾和下沉量的計算值與試驗值進行對比,結果如圖6和圖7所示。
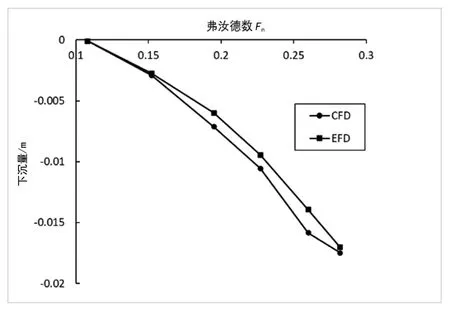
圖6 下沉量對比
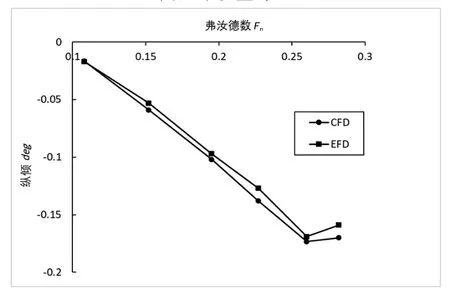
圖7 縱傾對比
通過圖中數據可以看出,船舶的下沉量隨著航速的增加而增加,而縱傾變化先隨著船速增加而增加,但弗汝德數足夠大,即高速時,縱傾值略有減小。模擬得到的下沉量和縱傾與試驗值較為接近,說明本文采用的數值方法可以準確地對船舶航態進行模擬。
4 結論
本文基于重疊網格技術,采用RANS方法對KCS集裝箱船的縱向航行狀態及阻力進行了數值模擬,將數值模擬結果與物理模型試驗結果進行了對比,并探討了船舶航行狀態、船舶阻力的預報方法。并形成了如下主要結論。
(1)采用RANS方法和Realizablek-ε湍流模型的數值方法,能夠快速準確地預報大型船舶阻力,結果可靠度高。
(2)基于重疊網格技術,可以很好地模擬大型船舶在不同航速下的航行姿態。
(3)通過對自有模型和約束模型模擬計算結果的對比,大型船舶的阻力數值計算應當計及航行姿態,特別是在高航速時,自由狀態下模型的計算結果與試驗值更為接近。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
