并聯式油電混合無人機的能量管理策略研究
2022-09-29 06:47:34陳宗科楊向宇
電源技術 2022年9期
關鍵詞:發動機
陳宗科,楊向宇
(華南理工大學電力學院,廣東廣州 510630)
無人機是一種遙控或自動飛行的飛行器,它可以攜帶攝像頭、傳感器等其他設備,執行一些特定任務[1]。無人機已經廣泛應用于軍用和民用方面,并且有了巨大的經濟效益。在無人機的開發中,無人機大小與載荷之間的權衡始終是一個問題,為了用更少的空間攜帶更大的載荷或飛行更長的時間,一方面通過集成化減少各種系統的質量和體積,另一方面致力于提高無人機能源的有效利用率[2]。
在鋰電池技術有突破之前,傳統無人直升機依然傾向于使用內燃機提供動力。但直升機飛行時僅能使用內燃機最大扭矩對應轉速的很小一段工作區間,效率較低。而且隨著環境問題越來越嚴重,人們也在尋求更有效的方案。混合動力系統就是其中的一種,混合動力系統將發動機和電機整合,通過能量的合理分配,充分利用兩者的優點避開低效率區間。混合動力系統從結構上主要分為串聯型、并聯型和混聯型[3]。串聯型的特點是結構簡單,發動機能始終工作在高效工作區,但能量轉換次數較多影響效率,因此主要研究方向是燃料電池和太陽電池[4]。并聯型的發動機與傳動系統存在機械耦合,不能總工作在高效區;但能量可以直接利用,效率高體積小。混聯型雖有各種優點,但結構復雜不適合用在小型無人機上。
早期的能量管理策略主要是基于規則的控制方法,后來出現了基于動態規劃的方法、基于等效油耗率的方法,近年來最優控制算法、模糊控制算法、神經網絡算法、遺產算法等先進智能算法也不斷被研究[5]。無人機和汽車的混合動力系統有相似之處,在進行能量管理時可以借鑒,但也需要分析不同之處,針對無人機的特點進行改進。
1 油電混合動力系統設計
1.1 混合動力系統結構
本文采用的同軸并聯型混合動力系統是并聯型混合動力系統的一種,該系統的發動機和電動機通過同一根軸傳遞功率,單個電機在電動模式和發電模式切換,如圖1 所示。這種系統結構簡單、體積小、效率高,適合小型無人機;但因為兩個動力源在同一根軸上,控制精確要求較高。
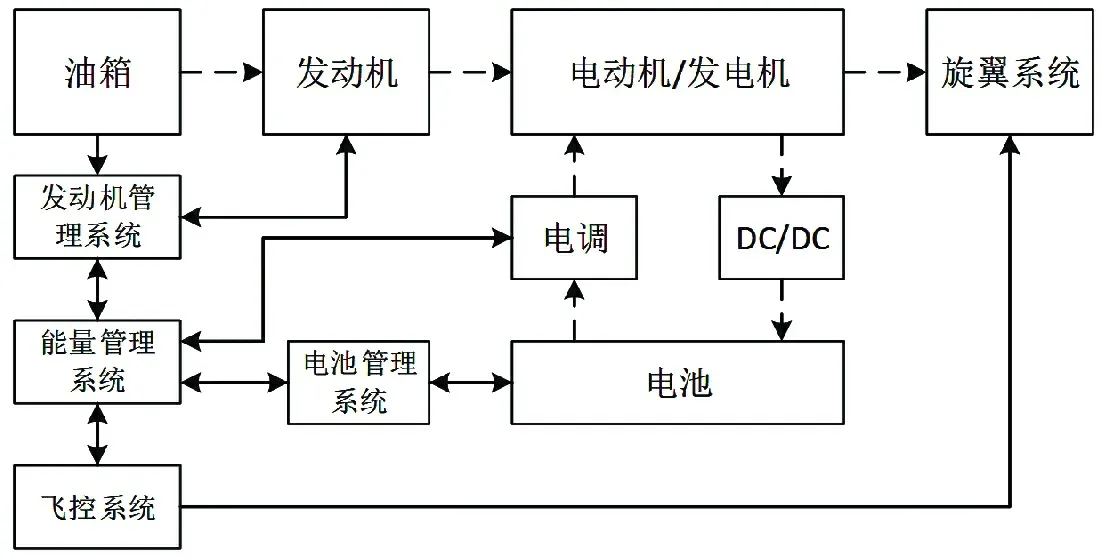
圖1 混合動力系統結構
1.2 發動機模型
發動機是混合動力系統的主要動力源,起著承擔基礎負載的作用。本文利用發動機的萬有特性圖,用試驗建模法建立發動機模型[6]。通過查閱發動機說明書和實際測試,得到發動機萬有特性圖(圖2)。圖2 中紅線被稱為理想工作曲線[7],是每個轉速和扭矩組合對應的油耗率最低的工作點連接起來得到的曲線,理論上工作在理想工作曲線可以用盡可能少的燃油得到最好的性能。
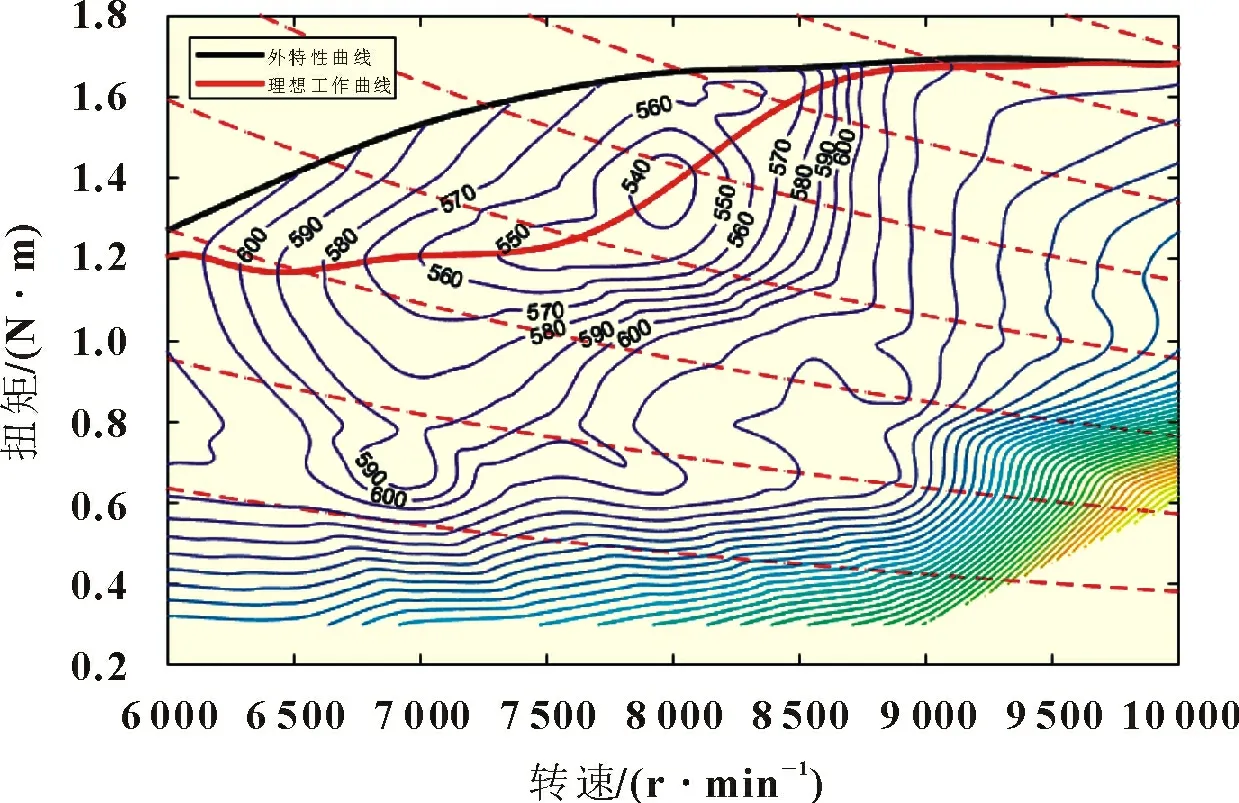
圖2 發動機萬有特性圖
經測試[8],發動機的轉速和節氣門開度可由傳遞函數表示為:

耗油量通過查表函數得到油耗率后經過積分獲得:

式中:B為總耗油量;b為燃油消耗率;Peng為發動機功率;Teng為扭矩;n為轉速。
1.3 電動機/發電機模型
電機是混合動力系統中的輔助動力源,主要作用是起到削峰填谷的作用,調節發動機的功率。
當電機工作在電動狀態,電動機輸出機械功率,電池放電電流為:

式中:U為鋰電池端電壓;Idis為鋰電池放電電流;ηm為電動機效率和電調損耗等。
當電機工作在發電狀態,發電機發出的電能經過電力電子變換器后給電池充電。若電池為恒流充電,則電池充電電流Ich保持不變(為常數),電池端電壓U隨電量變化,發電機消耗功率也隨之變化。

式中:ηgen為發電效率;ηDC為轉換效率;Pgen為發電機消耗機械功率。
1.4 電池模型
鋰電池的工作過程是復雜的電化學過程,本文采用等效電路模型。內阻模型是最常用也最簡單的一種模型,將鋰電池等效為一個理想電壓源UOC串聯一個電阻Rin[9],如圖3所示。
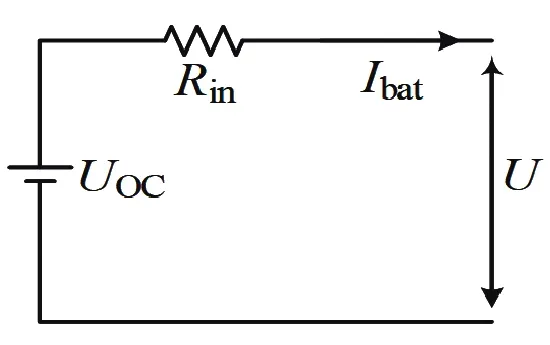
圖3 鋰電池的內阻模型等效電路
根據電路學知識可以得到鋰電池輸出端電壓:

內阻模型的鋰電池內阻Rin和開路電壓UOC隨荷電狀態(state of charge,SOC)變化,如圖4 所示,在仿真模型中通過查表獲得。
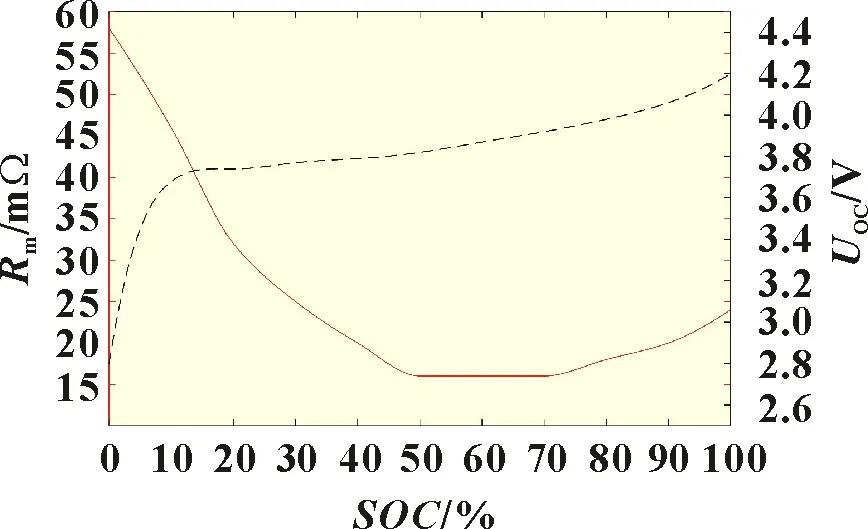
圖4 鋰電池內阻和開路電壓與SOC的關系
SOC是描述電池狀態的重要參數,它反映了電池的剩余容量。SOC計算主要有安時法與開路電壓法[9]。安時法是通過對單位時間內流過電池組的電流進行積分,從而得出這段時間內SOC的變化量。當電池的初始荷電狀態為SOC0,則t時刻的荷電狀態為:

式中:Qmax為鋰電池的最大電荷量。綜合兩種方法的優缺點,本文在無人機啟動時利用開路電壓法檢測開路電壓,獲得初始值SOC0;電池正常工作時,利用安時法實時檢測鋰電池工作電流并計算SOC。
2 混合動力系統的能量管理系統與策略
2.1 功率平衡與能量管理系統
能量管理系統主要在維持功率平衡的原則下合理分配功率:

當發動機單獨驅動時,無論電池是否充電,僅需對發動機進行恒轉速控制,通過調節節氣門開度即可自動完成功率平衡。

當發動機和電動機共同驅動時,能量管理系統會分配兩者各自的輸出功率。發動機的輸出功率大致上由節氣門開度決定,某轉速下的功率和節氣門開度具有線性正比關系。因此已知發動機分配功率時,可以查出對應節氣門開度,然后控制其不變;剩余的功率和各種擾動均由電動機承擔,通過控制電動機的轉速恒定達到功率平衡。

2.2 無人機與汽車混合動力系統的差異
根據葉素理論和動量理論提出了一種直升機的功率計算[10],根據該方法計算得到的飛行任務各階段需求功率分布如圖5 所示。直升機飛行時的功率分為誘導功率、型阻功率和廢阻功率,因為小型無人直升機旋翼轉速非常快而體積和重量都小,發動機的輸出大部分用來克服無人機的型阻功率,因此飛行時需求功率總在1 kW 以上。其中在爬升階段需求功率最大,高速巡航階段次之,懸停狀態適中,中低速巡航階段最小。
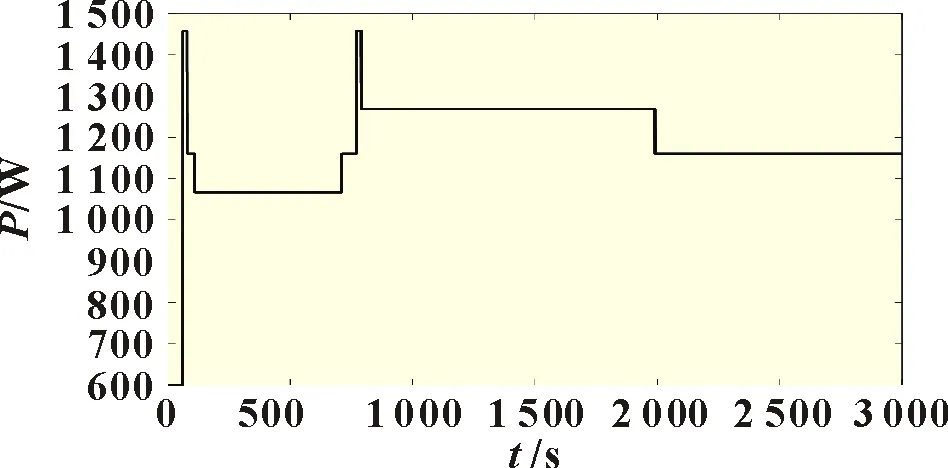
圖5 飛行任務需求功率分布圖
汽車的行駛速度根據路況不停變化,根據駕駛員的油門和剎車信號會頻繁加減速、啟停車等,因此發動機轉速變化大且頻繁,需求功率也不停變化。直升機在飛行時,為了保持穩定性,對發動機進行恒轉速控制,發動機只在提前預設的轉速工作。直升機中低速巡航時有最低需求功率,其他情況都是在此基礎上需求更多功率,可以分為基礎負載和額外負載。混合動力無人機的空間較小結構緊湊,發動機轉速快扭矩小,因此沒有離合器和變速器,且電動機作為輔助動力,功率和體積都比較小。因此汽車的混合動力系統可操作狀態更多,可以工作在純油動、純電動和混動三種狀態,也能通過換擋改善發動機工作點。
2.3 無人直升機能量管理策略
無人機能量管理策略的原則包括:(1)由發動機承擔主要負載,剩下的負載由電池補足;(2)發動機盡量工作在理想工作曲線附近;(3)鋰電池盡量保持在高效工作區間。
2.3.1 有限狀態機
有限狀態機是最普遍的控制策略之一,它簡單、可靠地使用預先確定的條件(if-then)管理,使受控對象切換不同的狀態;其特點是計算量少,從而支持在線實現,也是已經應用在汽車混合動力系統上的一項技術。根據上文提出的直升機工作特性,無人機的混合動力系統工作狀態大概分為發動機單獨驅動、混合驅動和電池充電。但必須考慮發動機的轉速,因為發動機轉速會影響旋翼轉速,進而影響需求功率和飛行狀態,又會反過來影響發動機的工作狀態。
有限狀態機流程如圖6 所示。
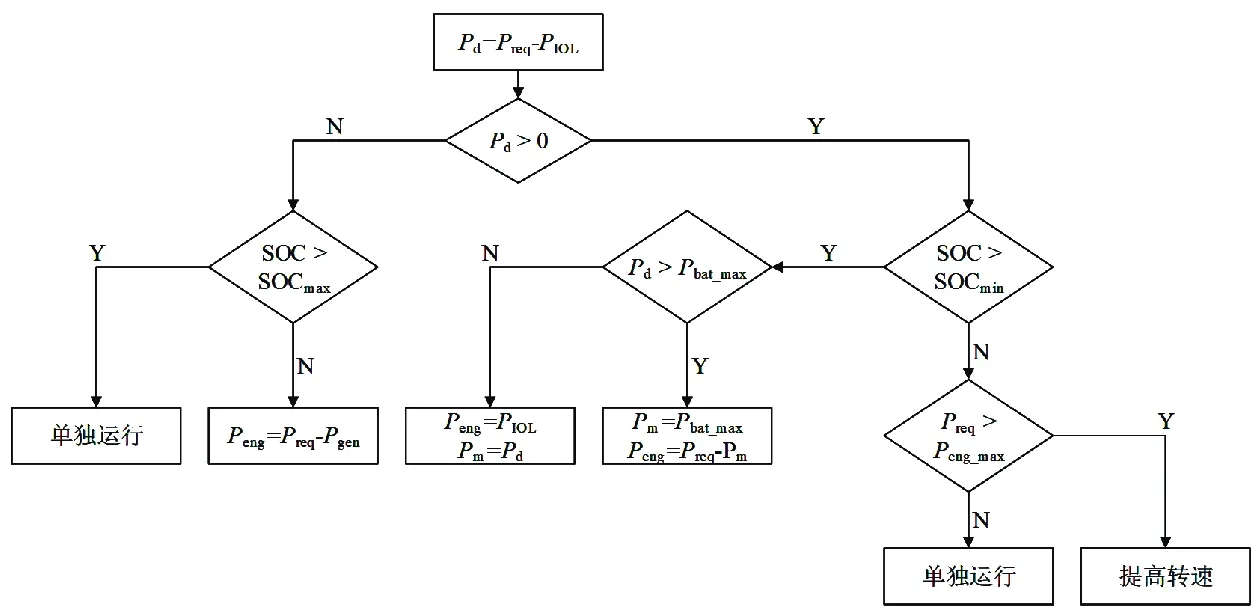
圖6 有限狀態機流程圖
第一步:求解需求功率與理想工作點功率的差值Pd。
第二步:測算鋰電池的SOC。
(1)若電池電量大于最小值,且需求功率大于理想功率,則發動機工作在理想工作點,鋰電池補充其余功率。
(2)若電池電量大于最大值,且需求功率小于理想功率,則發動機單獨運行,鋰電池不可用。
(3)若電池電量小于最小值,且需求功率大于理想功率,則發動機單獨運行,并給電池充電。若發動機功率小于發動機在該轉速的最大功率,則轉速不變;若發動機功率大于發動機在該轉速的最大功率,則發動機應提高轉速一個檔位,同時傳遞信號給飛控系統改變旋翼,使直升機進入新的穩態。
(4)若無法充電,則電池既不能充電也不能放電,相當于沒有使用混合動力系統。此時發動機必須提高轉速到最大扭矩處,按未使用混合動力系統時的狀態運行。
2.3.2 模糊控制
基于模糊邏輯的能量控制系統可以提高無人機混合動力系統的能量分配效率。隨著模糊控制器的輸入輸出信號增加,模糊規則會越復雜,模糊控制的精度也會越高。但同時越復雜的規則會越難以制定,控制策略的實現難度會提高,控制系統的反應速度也會變慢。綜合考慮系統的快速性和穩定性,經過反復嘗試,最終確定了模糊控制系統的輸入信號需求功率與理想工作點功率的比值Pd,電池的荷電狀態SOC,功率誤差信號Perror。輸出信號是發動機功率Peng和電池功率變化量dPbat。
Matlab 的模糊控制工具箱提供了兩種模糊推理類型,本文選擇Mamdani 型。在模糊控制輸入變量中Pd分為ZO、PS、PM、P0、PB 五個模糊子集;Perror分為NB、NM、NS、ZO、PS、PM、PB 七個模糊子集;SOC分為PS、PM、PB 三個模糊子集;輸出變量中Peng分為ZO、PS、PM、P0、PB 五個模糊子集;dPbat分為NB、NM、NS、ZO、PS、PM、PB 七個模糊子集。隸屬度函數以三角形隸屬度函數、梯形隸屬度函數為主,運算速度快。各個模糊子集范圍及其隸屬度函數如圖7 所示。
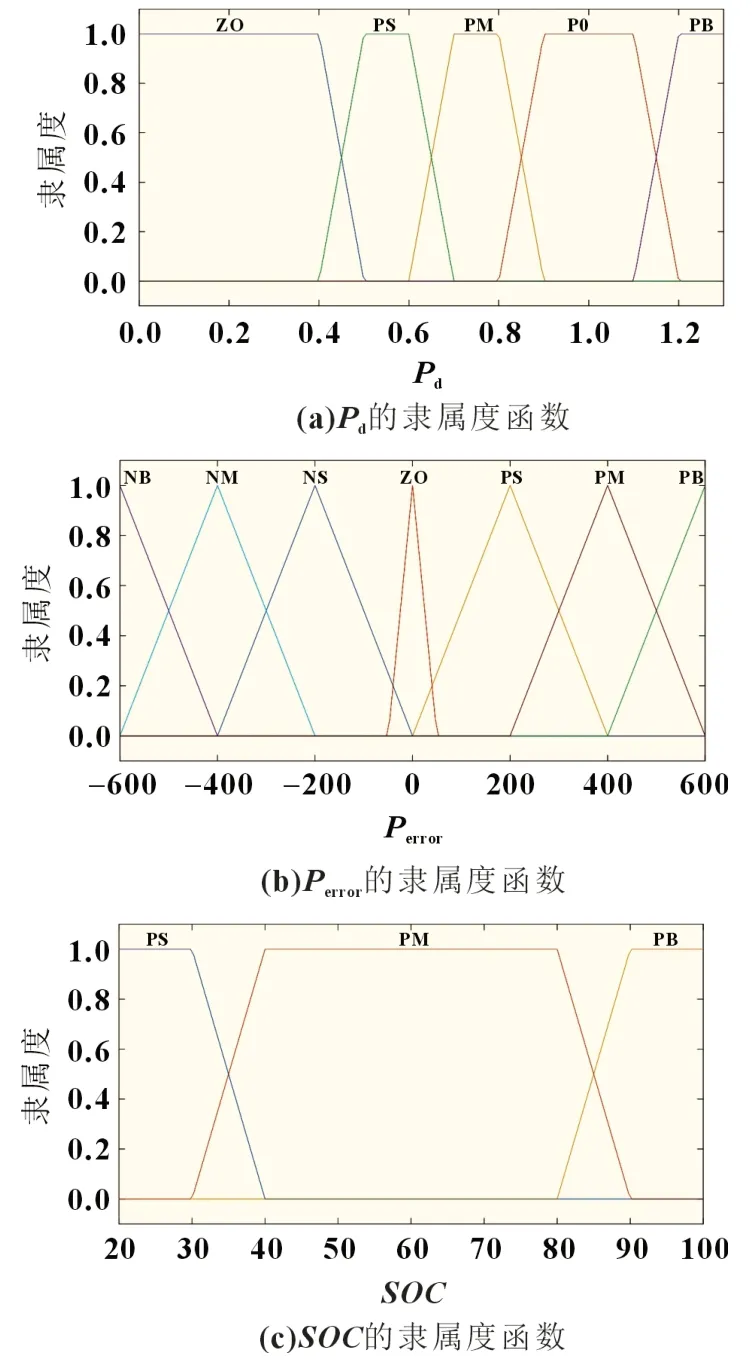
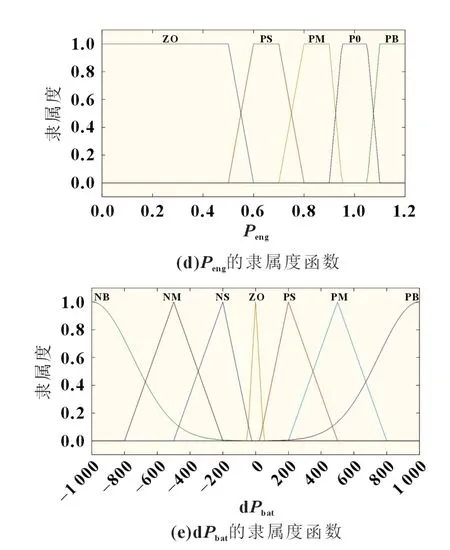
圖7 模糊控制隸屬度函數
模糊規則和有限狀態機的原則基本相同,如表1 所示。
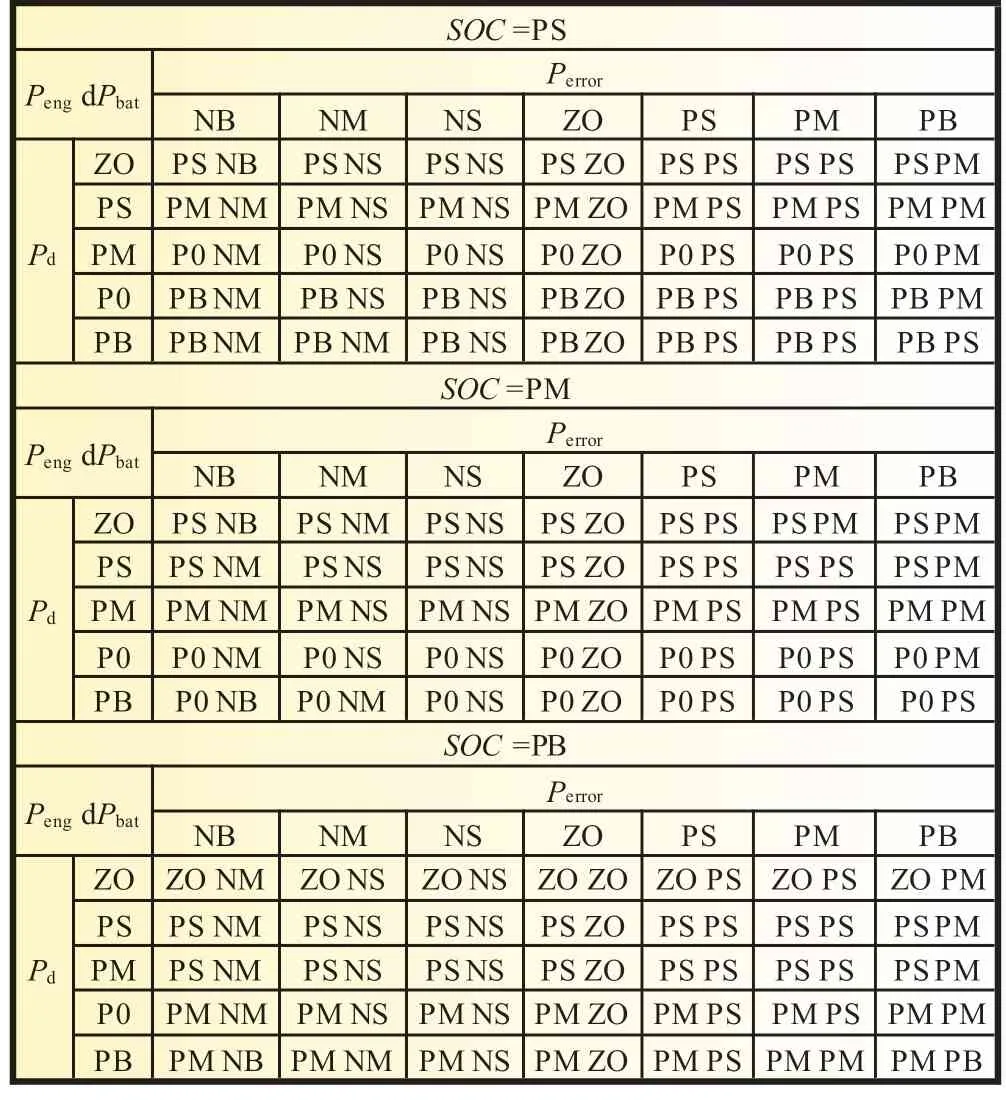
表1 模糊規則
3 仿真結果
不同策略下的發動機輸出功率如圖8 所示。發動機輸出功率基本保持在理想工作曲線附近,只有當電池電量較低時才增大輸出功率。不強制充電的有限狀態機策略下,發動機功率變化量最大,這是因為發動機工作在9 500 r/min 附近,需求功率大大提高。強制充電的有限狀態機策略下,鋰電池電量較低時在8 500 r/min 附近充電一段時間。模糊控制策略下,發動機基本工作在理想工作曲線附近,鋰電池電量下降時發動機功率變化也最小。將發動機的實際工作點在萬有特性圖中表示出來,如圖9 所示,可以看出混合動力系統對發動機工作區間起到了明顯的改善作用,主要工作點都集中在油耗率最低的區域附近。
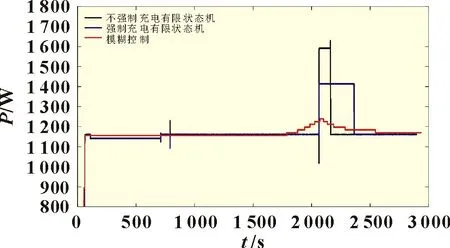
圖8 發動機功率
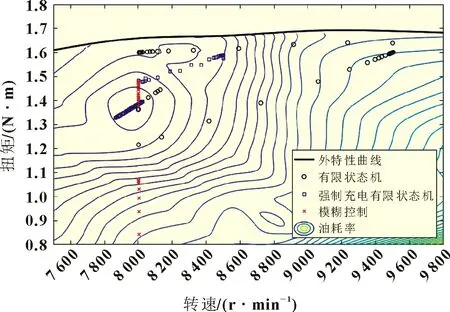
圖9 發動機實際工作點
相比優化之前,續航時間從1 890 s 延長到了有限狀態機的2 876 s 和模糊控制的1 933 s,分別延長了52.17% 和55.18%;鋰電池始終工作在高效區間,不會影響安全運行。強制充電的有限狀態機相比于不強制充電的有限狀態機,續航時間有所減少但最終SOC更高,這是將化學能轉化為電能儲存了起來。使用模糊控制的混合動力系統會綜合考慮發動機與電池的能量分配,提前采取措施使鋰電池不會進入到低效區,鋰電池的充放電次數與深度都最小,有利于延長鋰電池的使用壽命。
4 結論
(1)根據無人直升機特性,給出了一種并聯型油電混合動力系統的結構,并搭建仿真模型。
(2)比較汽車與直升機的工作狀態,設計更適合無人直升機的能量管理系統,并制定有限狀態機和模糊控制策略。
(3)以指定飛行任務為例,進行了仿真,表明能量管理策略能夠根據飛行任務合理分配混合動力系統的功率,發動機的油耗率基本保持在較低區域,該混合動力無人機的飛行時長是純油時的1.5 倍以上。模糊控制策略比有限狀態機策略更加高效合理。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15
