基于小波分解與融合的視頻去雨技術研究
2022-09-28 14:50:22陳強
電子設計工程 2022年18期
陳強
(安康學院科研處,陜西安康 725000)
近年來,計算機視覺在智慧交通、遙感探測、醫學儀器等領域都得到了廣泛應用。其中機器視覺技術用于交通監管,例如在路口對車輛速度和駕駛行為進行監控,對違規車輛實現自動識別,節省了人力資源。但在雨雪天氣下,采集到的圖像不夠清晰、對比度下降、細節丟失,在處理過程中容易出現誤判或者延時過大的情況[1-3]。去雨技術可以清晰化被雨噪聲污染的退化圖像,有利于圖像后續處理,提高相關技術的性能指標[4-6]。
雨滴在空間中的分布是隨機的,且處于高速自由下落的運動狀態,在圖像中的檢測和去除比較困難,圖像去雨技術也成為當前的研究熱點。Liu比較相鄰各幀的RGB 顏色分量,得到差值圖像,檢測結果的準確率較高,但需要增加數據量,犧牲了實時性[7]。Santhaseelan 設計的視頻去雨算法使用局部相位信息完成,去雨效果好,但同樣實時性不強[8]。
視頻去雨算法要想提高某一特性就要以犧牲其他性能為代價,存在計算量大、造成延時等問題[9]。該文根據雨線在頻率域呈現高頻的亮度特性,采用小波分解和融合的方法,從頻域角度對視頻各幀進行小波多層分解并計算出污染度,再根據污染度加權的重構規則對各幀進行小波重構,最后將各幀進行融合從而削弱圖像中的大部分雨噪聲。
1 雨滴特性
雨是日常生活中常遇到的天氣現象,在雨天拍攝圖片、視頻時,由于雨滴在空間中的分布是隨機的,且雨滴處于高速自由下落的運動狀態,雨滴在視頻成像時,會形成雨線,影響視頻的質量。雨滴為半徑0.05~1.75 mm 的近似球體,當雨滴較大時,近似為橢球體。在無風的情況下,雨滴降落受多個力學因素的共同影響,最終達到穩定速度,該速度與雨滴直徑有關。雨滴的降落方向受風向影響,在同一圖像中方向基本一致[10]。由于雨滴對光線的折射和反射,所以在圖像中,雨滴對應的像素亮度明顯高于背景像素。
另外,由于雨滴的下降速度影響,圖像上會產生模糊的雨線,降低了圖像的質量。雨滴的對應像素亮度同時受到雨滴和背景亮度的雙重影響。其亮度變化具有時間上的對稱性,并且雨滴像素的亮度值隨時間的波動很小[11]。
RGB 3 個原色通道的視角范圍遠小于雨滴視角范圍,所以通道值變化量可近似看成相等[12]。雨滴分布隨機,近地面速度較快,同一雨滴不可能出現在相鄰幀,任一像素也不會始終被雨滴遮擋。
2 圖像的小波分解與融合
圖像融合是將兩幅或多幅圖像的信息融合到一起,以獲得對同一畫面更為準確全面的圖像描述。小波分解有明顯的方向性和塔狀結構,對不同頻率的分量、方向、分解層,要用不同規則進行處理,利用冗余和互補信息來提高效果[13]。
對一幅圖像進行N層小波分解,然后進行融合,步驟如下:
1)對原始圖像(如圖1(a))進行小波分解,分解為4 個圖(圖1(b)、(c)、(d)、(e)),分別對應低頻近似系數、水平細節分量、垂直細節分量、對角細節分量。可根據實際需要,對低頻近似系數分量重復上述過程,建立小波塔形分解,分解的層數越高,數據的尺寸越小,包含的細節信息越少。
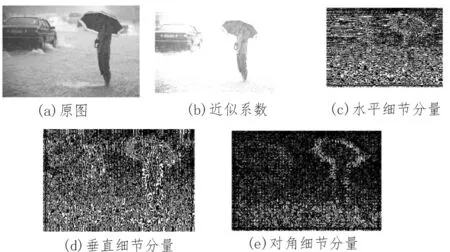
圖1 有雨圖像的小波分解
2)融合各分解層,使各層的低頻近似系數、高頻水平細節分量、高頻垂直細節分量、高頻對角細節分量等可以根據不同的要求,采用不同規則進行融合。
3)對金字塔進行圖像重構,得到融合結果。圖像融合過程如圖2 所示。
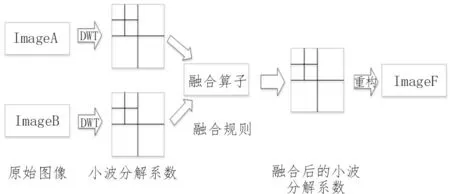
圖2 圖像融合過程
3 去雨算法
雨噪聲的頻率與景物信息有較為明顯的區別,紋理細節頻率最高,雨噪聲的頻率次之,顏色信息頻率最低。經小波分解,雨噪聲主要在低層高頻系數中,因此應盡量提高分解層數;然后再確定細節信息、雨噪聲等所在層[14]。
對退化圖像進行小波融合,根據頻率結構分別對背景與顏色、雨噪聲、紋理邊緣的細節三部分信息進行融合,并根據小波分解后的特點制定融合規則[15]。
融合雨噪聲就是融合高頻系數,融合規則的合理性是決定退化圖像中雨噪聲去除效果的關鍵。在視頻中觀察雨滴,其因移動而表現為明亮細線。雨滴呈透明液態,雨滴亮度均在200 尼特附近,比較一致[15]。
對含有雨噪聲的圖像進行小波處理時,鑒于雨的亮度比背景高得多,因此雨覆蓋的部分與背景部分的灰度相差較大,可以用局部梯度來表示灰度變化的大小,局部梯度如式(1)所示:

其中,Δxf(i,j)和Δyf(i,j)分別表示點(i,j)在水平和垂直方向上的梯度;M、N表示局部區域邊長。
雨的亮度一致,雨覆蓋部分與背景能量值高且穩定,局部能量如式(2)所示:

其中,f(i,j)表示像素灰度值。
局部梯度G和局部能量E兩個參數能表征出雨噪聲具有高且一致的亮度。
雨噪聲污染度S=G×E,表示圖像被雨噪聲污染的程度。
基于污染度的小波融合步驟如下:
1)小波分解:進行10 層小波分解,得到第2-4 層的高頻系數(含大部分雨噪聲)。
2)融合含噪高頻系數:求解2-4 層高頻系數矩陣及污染度S矩陣,對S矩陣歸一化處理,然后和系數矩陣逆加權,得到大幅減噪的新系數矩陣。
3)融合不含噪系數:融合5-10 層系數及第1 層高頻系數,其中包含了圖像主要細節信息,進行均值處理后,可突出圖像的顏色域和細節。
4)小波重構:重構融合后的系數,得到去雨圖像。融合流程如圖3 所示。
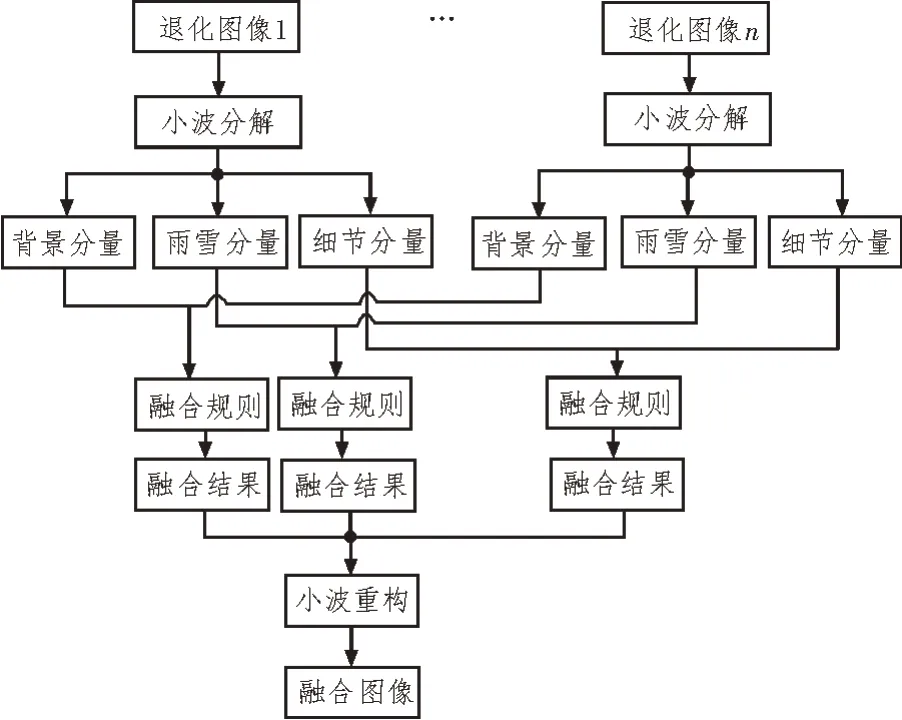
圖3 融合流程
4 實驗與驗證
為了驗證該文方法,使用Matlab 進行仿真試驗,步驟如下:
第一步,將一段有雨視頻分解成幀圖像,在利用多幅退化幀圖像進行融合的過程中,細節受損的多幅退化圖像間可以相互彌補,突出細節信息。
第二步,對每個幀畫面進行多層小波分解,隨分解層數的提高,其中的細節信息降低,呈現塔狀結構。圖4 為多層小波分解的低頻系數和分量,從上到下隨分解層數的提高,圖像中的像素塊增大,整幅圖像包含的細節信息減少,這一過程中雨噪聲在層數較低時含量較多,尤其雨噪聲在小波分解的第2-4層的含量最大,其他層多為背景信息,可以利用這個特性,制定融合規則,針對第2-4 層進行去除雨噪聲處理,將其他層進行融合,突出背景信息。
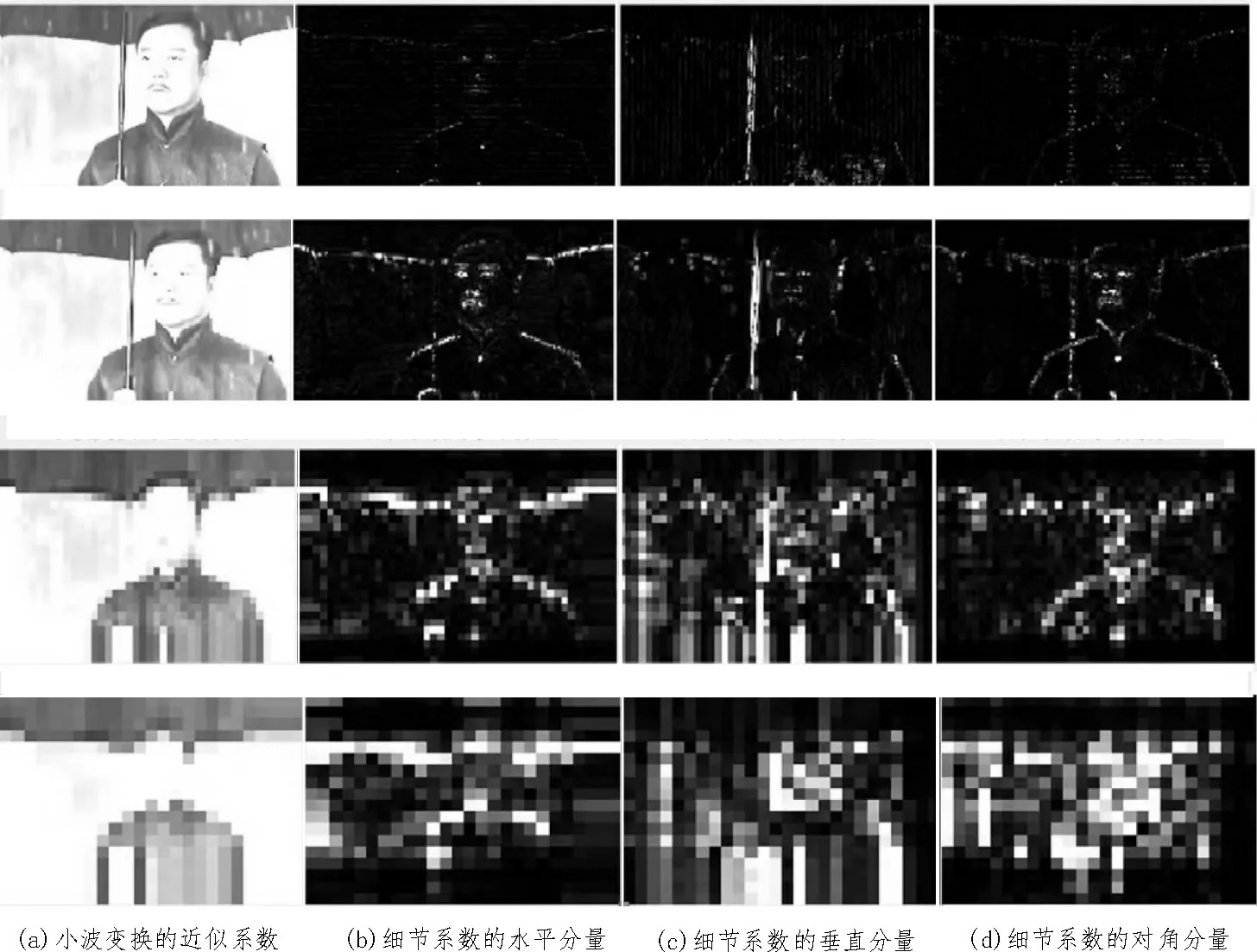
圖4 多層小波分解的低頻系數和分量
第三步,通過各幀根據污染度反向加權削減雨噪聲后進行小波融合。
第一步將視頻分解得到6 幀圖像,第二步將每一幀進行10 層小波分解,雨噪聲明顯比周圍像素亮度大,對其中第2-4 層以局部梯度來度量灰度變化,以確定雨噪聲的量,從而確定每一層的污染度。在進行融合時,根據污染度的大小反向加權,即污染度越大,權重越小,從而削弱第2-4 層的雨噪聲。由于物體邊緣或背景中的一些亮白像素容易誤判為雨噪聲,第2-4 層同樣會被削弱,所以該文對第1、5-10 層(主要含背景信息)加的權值大于1,進行補充。最后將融合好的6 幀圖像再次進行圖像融合,最終得到圖5(a)的融合結果。通過對比,融合后的圖像背景和輪廓更加清晰,雨線明顯減少,雨噪聲得到了極大抑制。
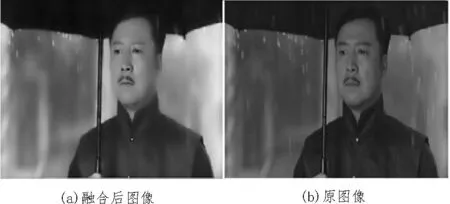
圖5 融合結果和原圖像的對比
5 結論
該文采用小波多層分解[16]和融合的方法,將圖像多層分解,確定含雨噪聲比較集中的層,并制定了基于污染度的反向加權融合規則(即污染度越大,權值越小),借此來削弱雨噪聲,并對視頻中圖像的特定層進行小波融合以去除雨線。實驗證明,該方法去雨效果明顯,具有一定的應用價值。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
家庭影院技術(2020年10期)2020-12-14 07:53:50
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
小學生優秀作文(低年級)(2018年10期)2018-10-13 01:56:50
小學生優秀作文(低年級)(2018年6期)2018-05-19 01:54:35
Coco薇(2016年10期)2016-11-29 19:59:58