漸變式橢球體區(qū)間預(yù)測(cè)控制
2022-09-26 10:09:24鄧鍇彧羅雄麟
化工自動(dòng)化及儀表 2022年5期
關(guān)鍵詞:系統(tǒng)
鄧鍇彧 萬(wàn) 鑫 羅雄麟
(中國(guó)石油大學(xué)(北京)信息科學(xué)與工程學(xué)院)
模型預(yù)測(cè)控 制 (Model Predictive Control,MPC)是20世紀(jì)80年代初發(fā)展起來的一類新型計(jì)算機(jī)控制算法[1,2],該算法直接在工業(yè)過程控制實(shí)際應(yīng)用,并在與工業(yè)應(yīng)用的緊密結(jié)合中不斷完善和成熟。 模型預(yù)測(cè)控制算法由于采用了多步預(yù)測(cè)、滾動(dòng)優(yōu)化及反饋校正等控制策略,因此具有控制效果好、魯棒性強(qiáng)和對(duì)模型精確性要求不高的優(yōu)點(diǎn),這些優(yōu)點(diǎn)決定了該方法能夠有效地應(yīng)用于復(fù)雜工業(yè)過程的控制,并且已在石油、化工、冶金及機(jī)械等過程控制系統(tǒng)中成功應(yīng)用[3~5]。
實(shí)際工業(yè)控制應(yīng)用中,MPC對(duì)被控變量(CV)的控制方式主要有設(shè)定值控制和區(qū)間控制[6,7]兩種。 設(shè)定值控制能夠?qū)⒈豢刈兞繃?yán)格控制在理想的目標(biāo)值, 適用于具有嚴(yán)格控制指標(biāo)的被控變量,但對(duì)于被控變量的嚴(yán)格控制又使得設(shè)定值控制具有自由度低和魯棒性差的缺點(diǎn),在工業(yè)過程遇到擾動(dòng)的情況下,控制性能會(huì)大打折扣,被控變量劇烈振蕩,影響產(chǎn)品性能與質(zhì)量[8~10]。 在一些工業(yè)領(lǐng)域,被控變量在一個(gè)特定范圍內(nèi)波動(dòng)對(duì)控制過程的影響幾乎相同,對(duì)于此類被控變量,無需將其控制到一個(gè)嚴(yán)格的設(shè)定值,而是將其控制在一個(gè)范圍內(nèi)即可,即區(qū)間控制[11]。 區(qū)間控制框架下的系統(tǒng)性能指標(biāo)與設(shè)定值型控制指標(biāo)不同[12,13],控制策略也不同。 當(dāng)被控變量到達(dá)設(shè)定區(qū)間內(nèi)時(shí),控制器不再產(chǎn)生控制作用;當(dāng)被控變量在設(shè)定區(qū)間外時(shí),控制器產(chǎn)生強(qiáng)控制作用,使被控變量快速回到設(shè)定區(qū)間。 用區(qū)間控制代替設(shè)定值控制會(huì)使系統(tǒng)的魯棒性和自由度大幅提高。
近些年來, 為了更好地滿足工業(yè)控制要求,區(qū)間控制算法已成為控制理論的熱門研究課題,并且在實(shí)際應(yīng)用中也取得了巨大發(fā)展。 文獻(xiàn)[12]研究了閉環(huán)系統(tǒng)的穩(wěn)定性。 文獻(xiàn)[14,15]采用多層結(jié)構(gòu)設(shè)計(jì)具有區(qū)間控制特點(diǎn)的區(qū)間控制策略,該策略中上層的優(yōu)化器可以計(jì)算最優(yōu)工作點(diǎn),而MPC控制器可以在約束條件下將系統(tǒng)的狀態(tài)驅(qū)動(dòng)至該點(diǎn)處。 文獻(xiàn)[16]設(shè)計(jì)了一種具有區(qū)間跟蹤特性的區(qū)間控制策略,使用距離范數(shù)來確保遞歸的可行性和局部最優(yōu)性,并通過仿真實(shí)驗(yàn)驗(yàn)證了該策略的性能。 文獻(xiàn)[17]設(shè)計(jì)了一種基于軟約束的區(qū)間控制算法,降低了違反區(qū)間控制目標(biāo)的頻率,并提高了閉環(huán)系統(tǒng)的穩(wěn)定性。 文獻(xiàn)[18]基于被控變量進(jìn)入目標(biāo)區(qū)間后還有額外的自由度,根據(jù)這種自由度設(shè)計(jì)優(yōu)化策略,來提高區(qū)間控制系統(tǒng)的經(jīng)濟(jì)效益。 文獻(xiàn)[19]提出一種軟約束處理方法改善控制品質(zhì),實(shí)現(xiàn)了區(qū)間控制。 文獻(xiàn)[20]提出一種穩(wěn)定的區(qū)間MPC控制器,該方法的代價(jià)函數(shù)中包括輸入輸出的穩(wěn)態(tài)經(jīng)濟(jì)目標(biāo)。 文獻(xiàn)[21]提出一種基于梯形區(qū)間軟約束的多目標(biāo)預(yù)測(cè)控制算法, 該算法將設(shè)定值控制和區(qū)間控制相結(jié)合,設(shè)置梯形區(qū)間,并建立兩個(gè)目標(biāo)函數(shù),有效減小了瞬時(shí)偏差的波動(dòng)幅度,縮短了達(dá)到目標(biāo)值的時(shí)間。
但是對(duì)于被控變量從初始狀態(tài)到目標(biāo)區(qū)間這一動(dòng)態(tài)響應(yīng)過程,現(xiàn)有文獻(xiàn)大多只是讓被控變量滿足過程約束,這就可能導(dǎo)致被控變量在到達(dá)目標(biāo)區(qū)間前產(chǎn)生很大的超調(diào)量。 使系統(tǒng)在不產(chǎn)生超調(diào)量的前提下快速進(jìn)入目標(biāo)區(qū)間成為亟待解決的問題。 為了解決這個(gè)問題,進(jìn)一步提高多輸入多輸出系統(tǒng)的整體性能,同時(shí)兼顧系統(tǒng)的穩(wěn)定性與快速性,筆者提出基于漸變式橢球體區(qū)間約束的預(yù)測(cè)控制算法。
1 問題的提出
現(xiàn)有的區(qū)間預(yù)測(cè)控制算法的研究更多關(guān)注目標(biāo)區(qū)間形狀的設(shè)計(jì),或?qū)︻A(yù)測(cè)時(shí)域進(jìn)行分割產(chǎn)生不同的控制策略。 對(duì)于多變量系統(tǒng),也有學(xué)者通過改變每個(gè)控制變量的權(quán)重來達(dá)到對(duì)不同變量的不同控制效果;也有將設(shè)定值控制與區(qū)間控制結(jié)合,不同的輸出變量采用不同的控制策略來達(dá)到控制效果; 亦有將控制過程分為兩個(gè)階段,從初始工作點(diǎn)到目標(biāo)區(qū)間這一階段注重響應(yīng)的快速性,當(dāng)被控變量進(jìn)入目標(biāo)區(qū)間后考慮系統(tǒng)的經(jīng)濟(jì)效益等。 這些區(qū)間控制策略本質(zhì)上都是在被控變量超出目標(biāo)區(qū)間時(shí)用強(qiáng)控制作用使被控變量快速返回目標(biāo)區(qū)間。 而控制器對(duì)于被控變量從初始工作點(diǎn)到目標(biāo)區(qū)間的狀態(tài)遷移過程只是讓其遵守相應(yīng)的全局約束。 這樣的控制策略無法解決系統(tǒng)控制效果快速性與穩(wěn)定性之間的矛盾。 被控變量快速進(jìn)入目標(biāo)區(qū)間可能導(dǎo)致系統(tǒng)超調(diào),而期望系統(tǒng)平滑進(jìn)入目標(biāo)區(qū)間又導(dǎo)致響應(yīng)時(shí)間變長(zhǎng)。
兩種區(qū)間控制策略對(duì)應(yīng)的不同閉環(huán)軌跡如圖1所示。 策略Ⅰ采用預(yù)測(cè)時(shí)域P較小的區(qū)間模型預(yù)測(cè)控制器, 輸出變量y能夠快速進(jìn)入?yún)^(qū)間控制目標(biāo)Ysp。 同時(shí),較小的預(yù)測(cè)時(shí)域P使得輸出變量y具有一定慣性,導(dǎo)致其突破了Ysp的邊界,直到t1時(shí)刻系統(tǒng)才達(dá)到穩(wěn)定。 策略Ⅱ采用了較大的預(yù)測(cè)時(shí)域P,可認(rèn)為閉環(huán)系統(tǒng)處于過阻尼狀態(tài),此時(shí)能夠避免超調(diào)現(xiàn)象, 但會(huì)使系統(tǒng)達(dá)到穩(wěn)定的時(shí)間變長(zhǎng),即t2>t1。
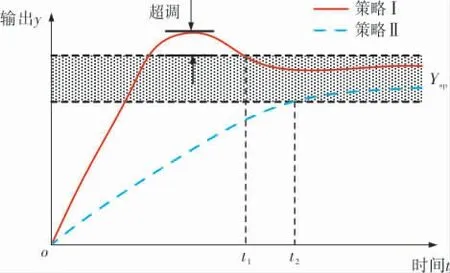
圖1 區(qū)間模型預(yù)測(cè)控制閉環(huán)軌跡
為了能夠改善上述問題,使得系統(tǒng)對(duì)于輸出變量控制效果在保證安全的前提下響應(yīng)兼具快速性與穩(wěn)定性,筆者設(shè)計(jì)了一種具有漸變橢球體約束的模型預(yù)測(cè)控制策略,本課題所設(shè)計(jì)的模型預(yù)測(cè)控制策略使得系統(tǒng)的開環(huán)預(yù)測(cè)軌跡在進(jìn)入設(shè)定區(qū)間之前不再僅遵從系統(tǒng)的全局約束,而是使其處于性能可設(shè)計(jì)的漸變式橢球體區(qū)間序列約束內(nèi)部,用以避免產(chǎn)生超調(diào)并提升系統(tǒng)的響應(yīng)速度,縮短響應(yīng)時(shí)長(zhǎng)。 在該策略下系統(tǒng)的閉環(huán)軌跡如圖2所示。
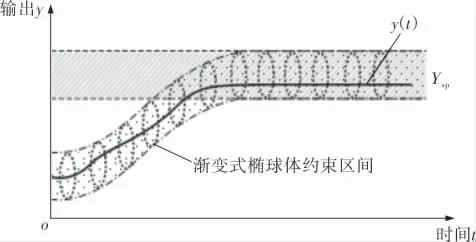
圖2 漸變式橢球體區(qū)間模型預(yù)測(cè)控制閉環(huán)軌跡
圖2所示的閉環(huán)軌跡存在一組由橢球體序列構(gòu)成的約束通道,使得被控變量沿著預(yù)設(shè)通道從初始狀態(tài)到達(dá)目標(biāo)區(qū)間,并且能夠快速進(jìn)入目標(biāo)區(qū)間,同時(shí)不會(huì)產(chǎn)生超調(diào)。
這樣做的意義在于確定了能夠使系統(tǒng)達(dá)到穩(wěn)態(tài)的預(yù)測(cè)時(shí)域P的合適范圍后, 保證系統(tǒng)控制效果穩(wěn)定的前提下對(duì)于提高系統(tǒng)響應(yīng)速度不用再調(diào)整預(yù)測(cè)時(shí)域P, 而是通過改變橢球體序列中約束橢球體個(gè)數(shù)N來使得系統(tǒng)響應(yīng)速度得到提升,并且相應(yīng)地減少超調(diào)量,使得系統(tǒng)輸出變量平滑地進(jìn)入目標(biāo)區(qū)間。
漸變式橢球體區(qū)間模型預(yù)測(cè)控制算法的各部分功能框圖如圖3所示。 圖3中性能可調(diào)的協(xié)調(diào)器用以在線產(chǎn)生k時(shí)刻漸變式橢球體開環(huán)軌跡約束集Y(yc,),該漸變式約束集能夠保證系統(tǒng)的開環(huán)預(yù)測(cè)軌跡處于性能可設(shè)計(jì)的約束區(qū)間內(nèi)部, 用以避免產(chǎn)生超調(diào)并提升系統(tǒng)的響應(yīng)速度。
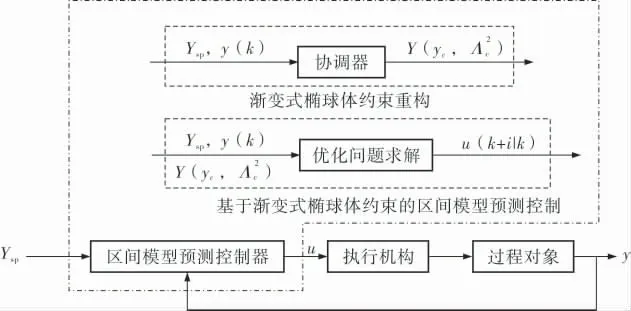
圖3 基于漸變式橢球體約束的區(qū)間模型預(yù)測(cè)控制功能框圖
針對(duì)橢球體控制目標(biāo)給出如下定義:
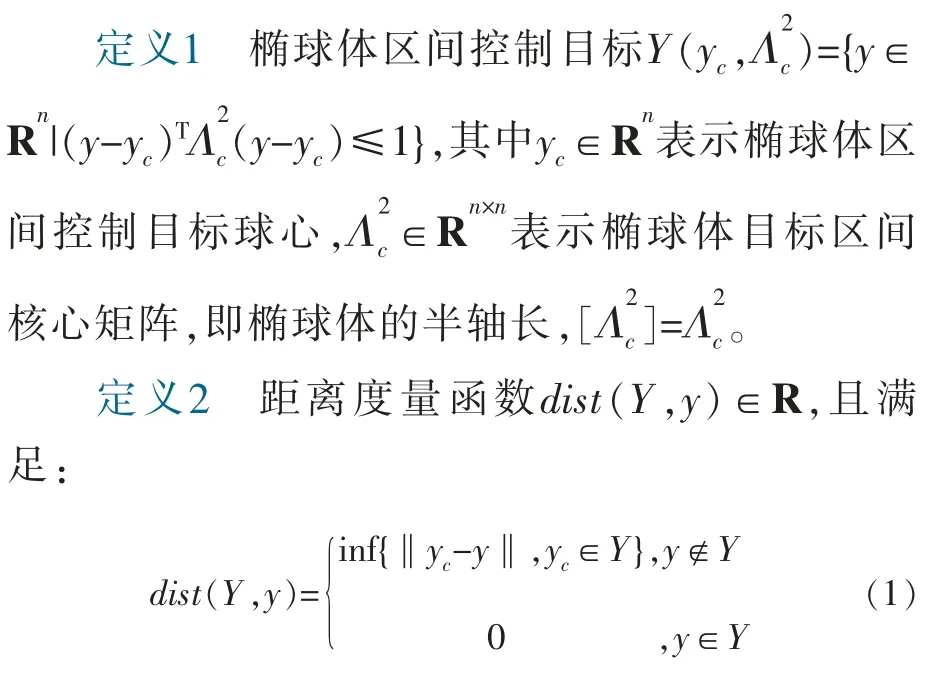
其中,Y?Rn表示控制目標(biāo)區(qū)間;y?Rn表示最優(yōu)穩(wěn)態(tài)點(diǎn);yc?Rn表示系統(tǒng)任意工作點(diǎn)。
定義3 給定橢球體控制目標(biāo)Ysp, 若存在控制器u(k)=G(x(k))使得閉環(huán)系統(tǒng)x(k+1)=Ax(k)+Bu(k),y(k)=Cx(k)滿足:對(duì)于?γ>0,?T0>0使得?t≥T0,均有dist(Y,y)≤γ成立,則認(rèn)為,橢球體目標(biāo)控制系統(tǒng)是穩(wěn)定的。
2 橢球體區(qū)間目標(biāo)的構(gòu)造與坐標(biāo)變換
常用的區(qū)間控制目標(biāo)是盒子型目標(biāo),盒子型目標(biāo)區(qū)間邊界不光滑且存在斷點(diǎn),而且由于頂點(diǎn)的存在,無法在漸進(jìn)穩(wěn)定的平衡點(diǎn)處構(gòu)建較大的吸引域,而且這些斷點(diǎn)造成區(qū)間控制目標(biāo)無法用解析函數(shù)的形式表示,所以只能通過比較與判斷相結(jié)合的方式進(jìn)行位置的確定以及空間中的距離的求解,即都需要將當(dāng)前狀態(tài)變量在空間中的位置與目標(biāo)區(qū)間邊界的距離逐一比較,才能進(jìn)一步計(jì)算當(dāng)前狀態(tài)與區(qū)間控制目標(biāo)之間的距離。 對(duì)于被控變量是否進(jìn)入目標(biāo)區(qū)間也需要進(jìn)行判別,這就大幅增加了計(jì)算難度。
替換后的橢球體控制目標(biāo)是具有光滑的表面并能用一個(gè)光滑的函數(shù)表示的凸集區(qū)間,在求取空間中的狀態(tài)變量與橢球體區(qū)間控制目標(biāo)的距離時(shí),能夠直接采用解析的方法獲得。 因此,筆者所提算法采用橢球體型目標(biāo)區(qū)間。
2.1 橢球體目標(biāo)區(qū)間構(gòu)造
由于生產(chǎn)工藝條件或過程硬件物理性能具有極限承受力而產(chǎn)生的約束稱為過程約束,這種過程約束一般表現(xiàn)為盒子型。 過程約束Ψ的表達(dá)式為:
其中,yi表示狀態(tài)向量y的第i個(gè)分量,、分別表示第i個(gè)分量的最小值 與最大值,I[i,n]為整數(shù)集合。
現(xiàn)以控制系統(tǒng)的初始工作點(diǎn)yinit與最優(yōu)穩(wěn)態(tài)點(diǎn)ysp為中心構(gòu)建橢球體形式的區(qū)間, 如圖4所示。
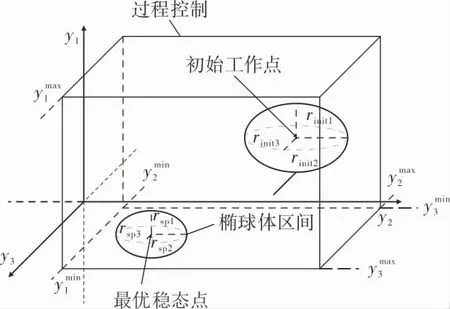
圖4 橢球體區(qū)間構(gòu)造示意圖
其中,rsp、rinit分別表示以最優(yōu)穩(wěn)態(tài)點(diǎn)和初始工作點(diǎn)為中心的橢球體區(qū)間的半徑。
令所構(gòu)造橢球體區(qū)間半軸長(zhǎng)度與過程約束邊長(zhǎng)滿足如下關(guān)系:

2.2 橢球體區(qū)間坐標(biāo)變換
根據(jù)定義,以最優(yōu)穩(wěn)態(tài)點(diǎn)ysp為球心構(gòu)造的目標(biāo)橢球體區(qū)間為基準(zhǔn)進(jìn)行坐標(biāo)變換,其解析形式表達(dá)式為:

其中,Λsp表示輸出偏差加權(quán)陣,正定陣。
根據(jù)矩陣的基本性質(zhì),橢球體目標(biāo)區(qū)間標(biāo)準(zhǔn)形式為:

其中,I表示單位矩陣。 令y′sp=Λspysp,y′=Λspy,則其表達(dá)式進(jìn)一步可以寫為:

坐標(biāo)變換后以y′c為球心,r′c為半徑的閉合球體表示為:

式(7)可以視作一個(gè)球體,那么Y(y′sp,I)與B(y′sp,r′sp)均表示目標(biāo)球體區(qū)間。
過程約束與初始橢球體區(qū)間,做同等坐標(biāo)變換后變?yōu)橐粋€(gè)正方體型的過程約束和一個(gè)球體初始區(qū)間,其表達(dá)式分別為:

區(qū)間控制下系統(tǒng)狀態(tài)處于目標(biāo)區(qū)間之外時(shí)會(huì)以距離度量函數(shù)為性能指標(biāo),該指標(biāo)表示系統(tǒng)當(dāng)前狀態(tài)與區(qū)間控制目標(biāo)之間的距離。
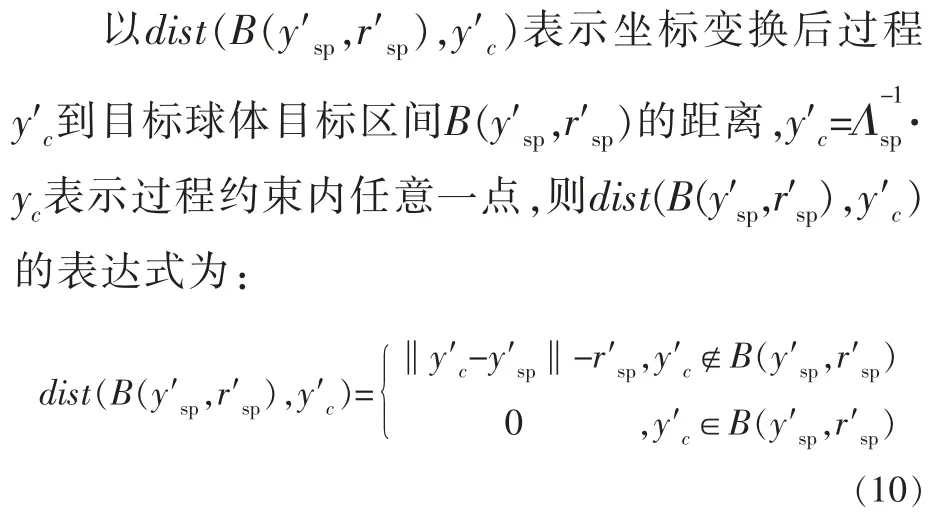
由式(10)可以看出,當(dāng)y′c在目標(biāo)球體區(qū)間內(nèi)部時(shí)dist(B(y′sp,r′sp),y′c)恒為零,y′c在目標(biāo)球體區(qū)間外部時(shí)dist(B(y′sp,r′sp),y′c)表示y′c到目標(biāo)球體區(qū)間B(y′sp,r′sp)邊界的最短距離。
則對(duì)應(yīng)優(yōu)化問題的性能指標(biāo)函數(shù)為:
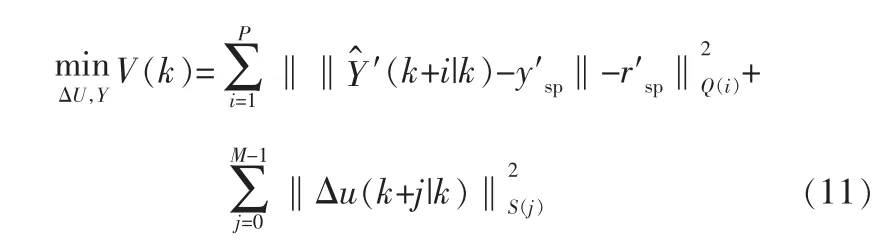
其中,ΔU為控制變量增量,Δu(k+j|k)表示未來j時(shí)刻的控制作用的增量。
2.3 漸變約束序列在線生成
3 漸變式球體區(qū)間預(yù)測(cè)算法的實(shí)現(xiàn)
3.1 漸變式球體區(qū)間優(yōu)化問題的描述
y^′P(k+i|k)(i=1,…,P)表示以k時(shí)刻為基準(zhǔn)未來i個(gè)時(shí)刻的開環(huán)預(yù)測(cè)輸出。系統(tǒng)在k時(shí)刻的P個(gè)開環(huán)預(yù)測(cè)輸出(k+i|k)(i=1,…,P)使它們受到第k+1~k+P這P個(gè)球體的約束。當(dāng)時(shí)刻變?yōu)閗+1時(shí),系統(tǒng)從k+1時(shí)刻開始未來i個(gè)時(shí)刻的開環(huán)預(yù)測(cè)輸出y′P((k+1)+i|k)(i=1,…,P)使它們受到第(k+1)+1~(k+1)+P這P個(gè)球體的約束。把這種漸變式球體區(qū)間約束策略記作φ′(B(y′c,R′c),(k+i|k))。
這種約束策略與系統(tǒng)當(dāng)前時(shí)刻k、 系統(tǒng)的預(yù)測(cè)時(shí)域長(zhǎng)P和球體約束個(gè)數(shù)N相關(guān), 當(dāng)k+P<N時(shí),系統(tǒng)在k時(shí)刻的P個(gè)開環(huán)預(yù)測(cè)輸出均未到達(dá)目標(biāo)球體區(qū)間, 所以球體區(qū)間約束序列仍要向前滾動(dòng)。 φ′(B(y′c,R′c),(k+i|k))表示如下:

當(dāng)k+P≥N時(shí),系統(tǒng)第N-k+1時(shí)刻的開環(huán)預(yù)測(cè)輸出會(huì)進(jìn)入目標(biāo)區(qū)間, 使其受到第N個(gè)球體區(qū)間的約束, 令N-k+1時(shí)刻之后的開環(huán)預(yù)測(cè)狀態(tài)也受到第N個(gè)球體區(qū)間的約束, 此時(shí)實(shí)際上系統(tǒng)輸出已經(jīng)到達(dá)符合要求的目標(biāo)區(qū)間,則φ′(B(y′c,r′c),(k+i|k))可表示為:

根據(jù)以上分析, 系統(tǒng)預(yù)測(cè)時(shí)域P一般取動(dòng)態(tài)響應(yīng)時(shí)長(zhǎng)的1/4,P確定后影響該算法對(duì)系統(tǒng)控制效果的因素為球體序列中球體個(gè)數(shù)N。當(dāng)N發(fā)生改變時(shí),筆者提出的算法對(duì)系統(tǒng)的控制效果將會(huì)改變。 系統(tǒng)開環(huán)預(yù)測(cè)輸出值受球體區(qū)間約束序列的滾動(dòng)次數(shù)為N次。可以預(yù)見的是,隨著N的增大,球體區(qū)間約束的滾動(dòng)次數(shù)會(huì)增加,系統(tǒng)的響應(yīng)軌跡會(huì)越來越平滑,能夠完全在球體約束序列形成的通道中進(jìn)入目標(biāo)區(qū)間,相應(yīng)地系統(tǒng)響應(yīng)時(shí)間會(huì)變長(zhǎng)。如果N過小,被控變量響應(yīng)過程中在某些時(shí)刻會(huì)超出預(yù)測(cè)通道產(chǎn)生振蕩。
本研究的優(yōu)化問題表示為:
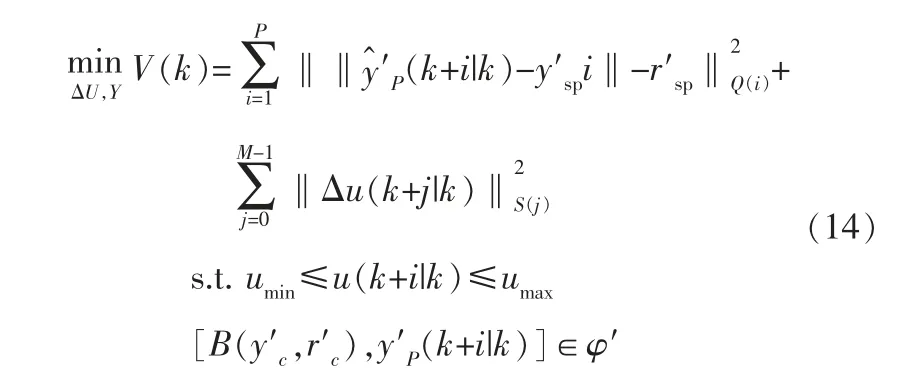
優(yōu)化目標(biāo)函數(shù)包括兩部分:狀態(tài)變量到目標(biāo)區(qū)間的距離度量函數(shù)與控制增量的變量。 約束條件中,[B(y′c,r′c),y′P(k+i|k)]∈φ′是本算法中開環(huán)預(yù)測(cè)狀態(tài)應(yīng)該滿足的約束條件,由于此條件滿足過程約束:

所以滿足此條件的開環(huán)預(yù)測(cè)狀態(tài)必然滿足過程約束。 不同情況下的球體區(qū)間約束序列為:

表現(xiàn)形式如式(12)、(13)。
3.2 區(qū)間預(yù)測(cè)控制優(yōu)化性能指標(biāo)求解
由于本算法對(duì)應(yīng)優(yōu)化問題并非標(biāo)準(zhǔn)形式,所以需轉(zhuǎn)化為標(biāo)準(zhǔn)形式后進(jìn)行求解。
假設(shè)預(yù)測(cè)控制采用如下線性時(shí)不變離散狀態(tài)空間模型:

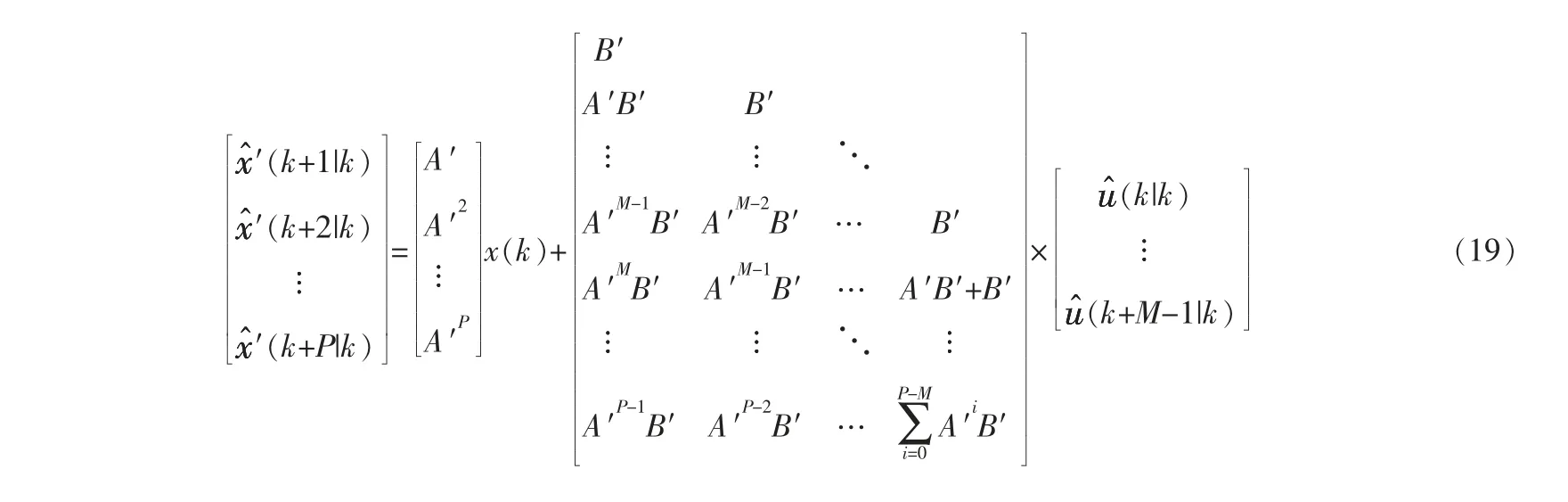
2.2節(jié)中分析了對(duì)控制系統(tǒng)整體做坐標(biāo)變換不會(huì)影響系統(tǒng)的控制效果,對(duì)系統(tǒng)模型整體左乘并做與漸變式橢球體區(qū)間同等的坐標(biāo)變換得到新的模型:

則系統(tǒng)狀態(tài)的預(yù)測(cè)表示成矩陣形式為:
此時(shí)系統(tǒng)輸出的預(yù)測(cè)表示為:
即:
未來M個(gè)控制增量的動(dòng)態(tài)矩陣Γ為:
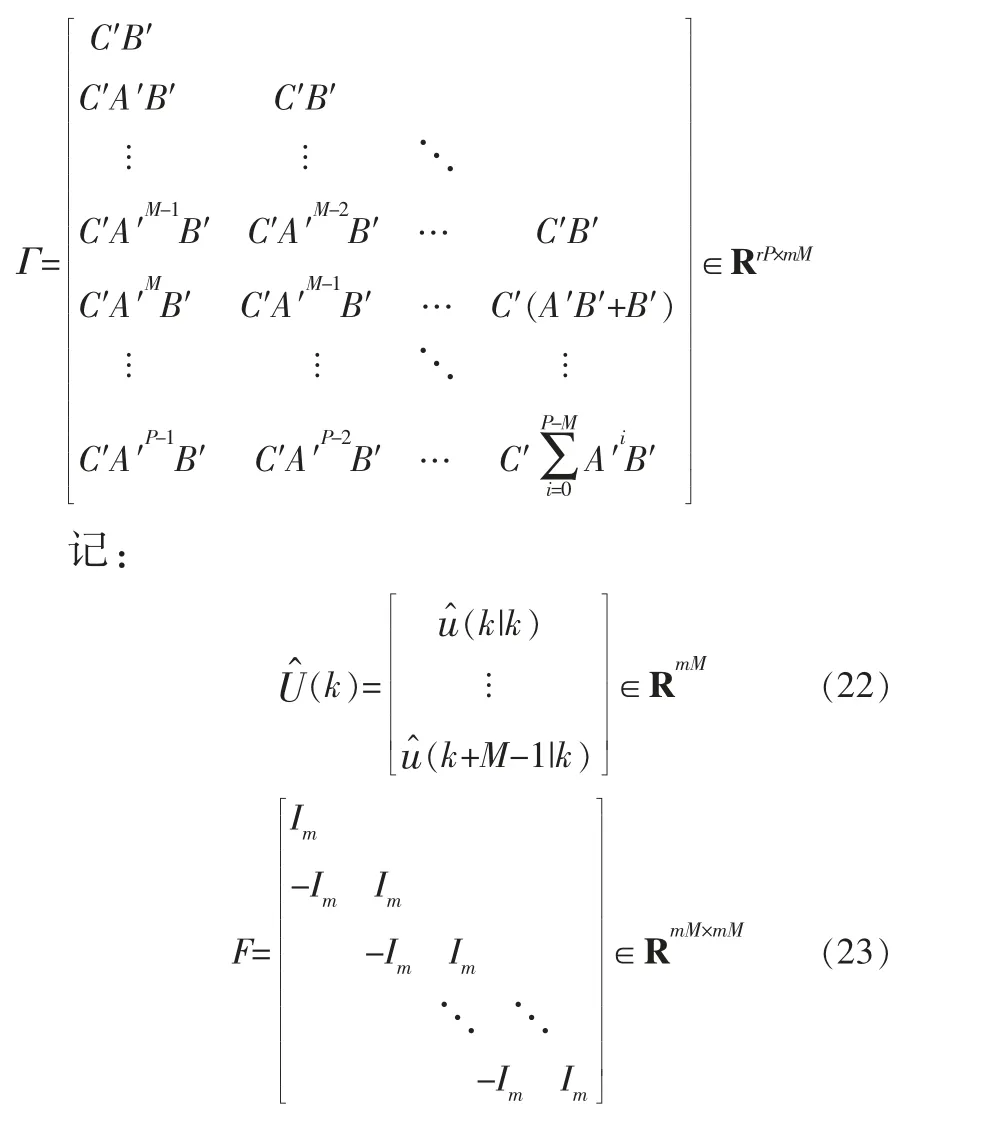
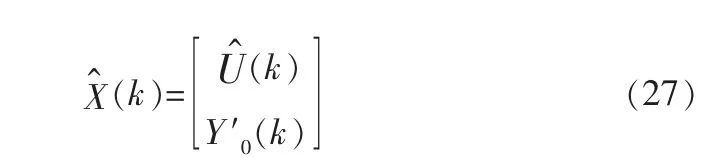
性能指標(biāo)函數(shù)可以寫為:
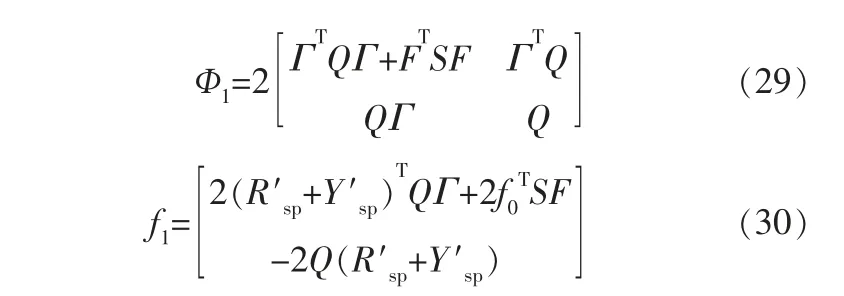
const為常數(shù)部分, 對(duì)優(yōu)化問題不構(gòu)成影響,可以忽略,所以新的性能指標(biāo)函數(shù)為:

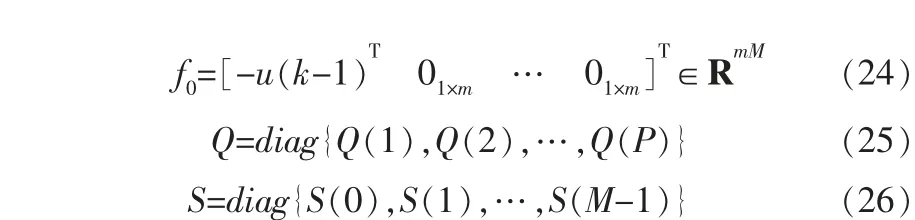
本算法預(yù)測(cè)控制中輸入約束條件為:

記:

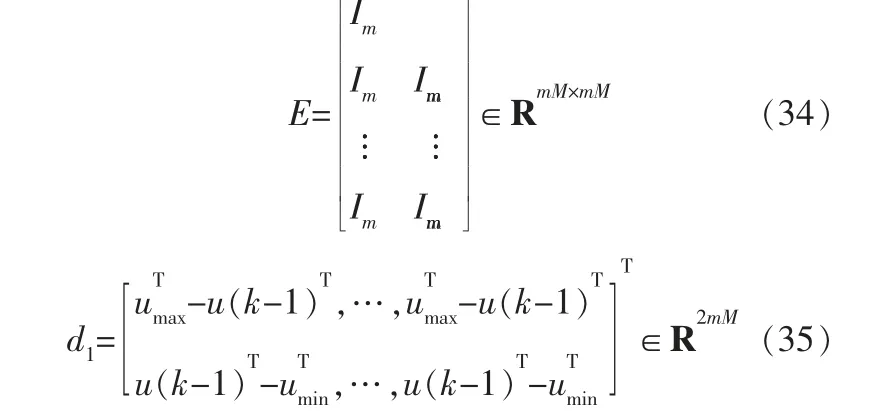
輸入約束條件轉(zhuǎn)化為:

k時(shí)刻對(duì)應(yīng)的開環(huán)預(yù)測(cè)輸出應(yīng)該滿足的條件描述如下。
假設(shè)約束球體個(gè)數(shù)足夠多,即N取值足夠大,此時(shí)滿足k+P<N,則開環(huán)輸出滿足的條件為:

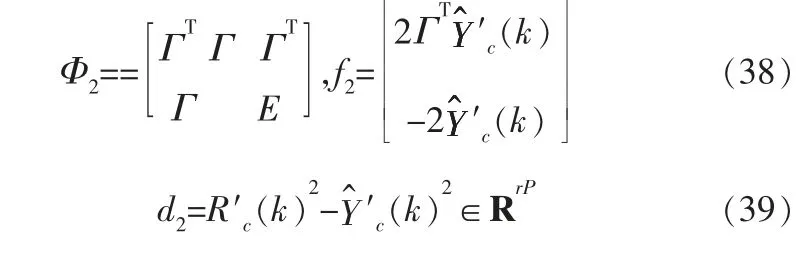
此時(shí)開環(huán)輸出滿足的約束可以寫為:

本研究的優(yōu)化問題轉(zhuǎn)化為:

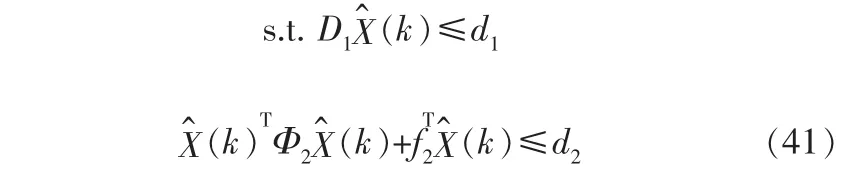
因此,漸變式橢球體區(qū)間預(yù)測(cè)控制算法轉(zhuǎn)化為一個(gè)具有二次約束的二次規(guī)劃問題。 采用有關(guān)算法可以獲得最優(yōu)解X*(k),由此得到U*(k)=[ImM0mM×rP]X*(k),k+1時(shí)刻重新滾動(dòng)計(jì)算優(yōu)化問題。
4 實(shí)驗(yàn)仿真分析
為了驗(yàn)證筆者所提算法在多輸入多輸出線性離散系統(tǒng)中的有效性,實(shí)驗(yàn)采用殼牌公司的重油分餾塔進(jìn)行仿真,其傳遞函數(shù)矩陣為:
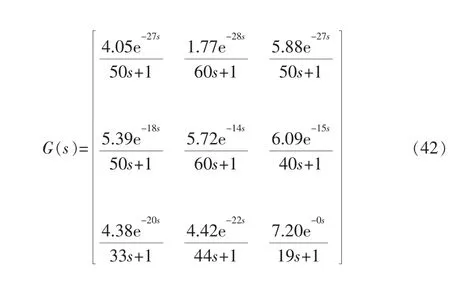
實(shí)驗(yàn)仿真結(jié)果中y1、y2、y3是輸出變量,本實(shí)驗(yàn)仿真的系統(tǒng)預(yù)測(cè)時(shí)域P取25 min。 u1∈[-0.5,0.5],u2∈[-0.5,0.5],u3∈[-0.5,0.5],y1∈[-0.5,0.5],y2∈[-0.5,0.5],y3∈[-0.5,0.5], 系統(tǒng)各個(gè)變量表示含義以及約束條件見表1、2。 對(duì)于系統(tǒng)變量與約束條件均做了無量綱處理。
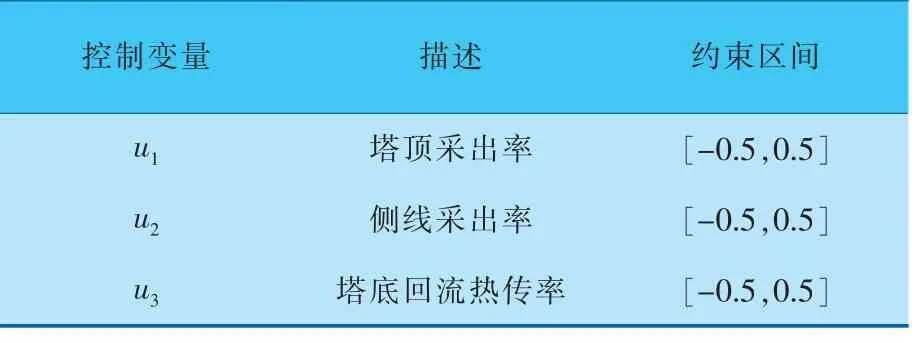
表1 Shell控制問題的各控制變量約束區(qū)間
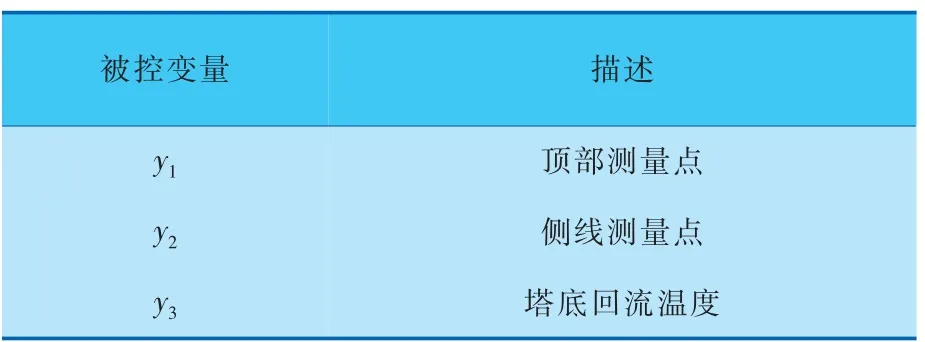
表2 Shell控制問題的各被控變量
仿真實(shí)驗(yàn)的預(yù)測(cè)時(shí)域P取25 min,約束序列個(gè)數(shù)N取25、50、75。 改變N值系統(tǒng)的控制效果不同,仿真實(shí)驗(yàn)重點(diǎn)關(guān)注N取不同值情況下, 最佳的控制效果, 即兼具響應(yīng)快速性與穩(wěn)定性的最佳N的取值情況。
控制目標(biāo)設(shè)置為以(0.13,0.17,0.18)為球心,半徑為0.1的球體區(qū)間。 N取25、50、75不同值時(shí),系統(tǒng)響應(yīng)曲線如圖5所示。N越大系統(tǒng)輸出進(jìn)入目標(biāo)區(qū)間的響應(yīng)軌跡越平滑。
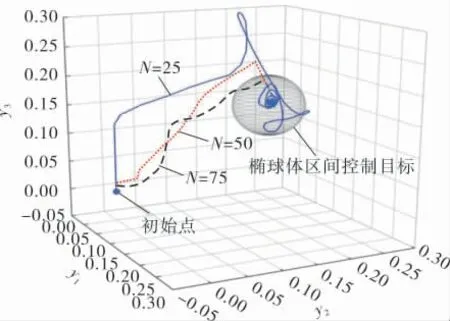
圖5 系統(tǒng)響應(yīng)軌跡
由圖5可以看出,N取任何值系統(tǒng)輸出都能最終到達(dá)目標(biāo)區(qū)間,并且保持穩(wěn)定。N取25時(shí)系統(tǒng)的響應(yīng)軌跡不在約束球體序列形成的通道中,N取50時(shí)會(huì)有部分時(shí)刻的狀態(tài)變量超出預(yù)設(shè)通道,當(dāng)N取75時(shí)系統(tǒng)狀態(tài)變量能完全在預(yù)設(shè)通道內(nèi)部到達(dá)球體控制目標(biāo)。
N取25時(shí)的仿真結(jié)果及其對(duì)應(yīng)的控制律如圖6所示。 此時(shí),輸出變量在進(jìn)入目標(biāo)區(qū)間之前產(chǎn)生劇烈振蕩,會(huì)有大部分時(shí)刻的實(shí)際輸出超出預(yù)設(shè)通道并且產(chǎn)生很大的超調(diào)量。
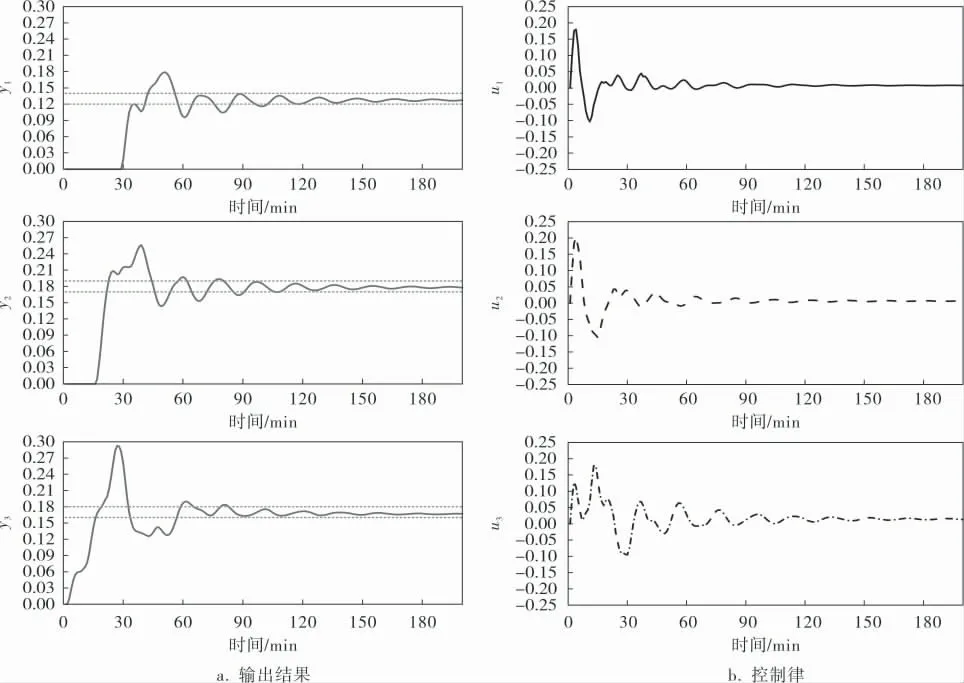
圖6 N取25時(shí)系統(tǒng)的輸出結(jié)果與系統(tǒng)控制律
N取50時(shí)的仿真結(jié)果及其對(duì)應(yīng)的控制律如圖7所示。 系統(tǒng)輸出在進(jìn)入目標(biāo)區(qū)間前不會(huì)產(chǎn)生振蕩,但仍然有部分時(shí)刻輸出超出預(yù)設(shè)通道,但超調(diào)量明顯變小。
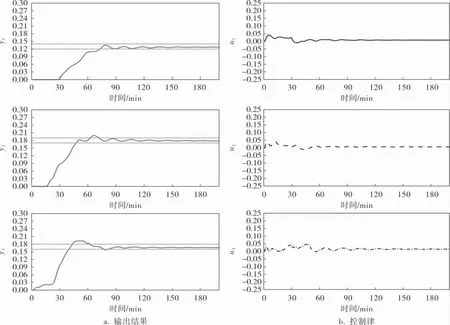
圖7 N取50時(shí)系統(tǒng)的輸出結(jié)果與系統(tǒng)控制律
N取75時(shí)的仿真結(jié)果及其對(duì)應(yīng)的控制律如圖8所示。 系統(tǒng)輸出平緩地進(jìn)入目標(biāo)區(qū)間并達(dá)到穩(wěn)態(tài),不會(huì)產(chǎn)生超調(diào)量且完全在預(yù)設(shè)通道內(nèi)進(jìn)入目標(biāo)區(qū)間。
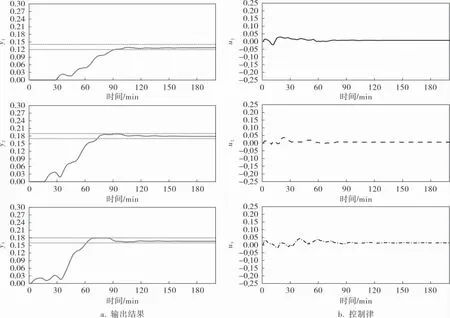
圖8 N取75時(shí)系統(tǒng)的輸出結(jié)果與系統(tǒng)控制律
用系統(tǒng)動(dòng)態(tài)響應(yīng)過程中超出預(yù)設(shè)通道的輸出變量到預(yù)設(shè)通道距離的平方之和ε表示被控變量偏離預(yù)設(shè)通道的程度, 在P取25、N取值不同的情況下,y1、y2、y3的偏離程度見表3。 可以看出,在預(yù)測(cè)時(shí)域P確定的情況下,隨著N取值變大,系統(tǒng)的控制效果會(huì)越來越穩(wěn)定, 當(dāng)N的取值超過50時(shí)系統(tǒng)輸出變量能完全沿著橢球體區(qū)間的約束序列形成的通道達(dá)到穩(wěn)態(tài),不會(huì)超出通道,系統(tǒng)不會(huì)產(chǎn)生任何超調(diào)量。系統(tǒng)的被控變量在N取50~75之間某一確定值時(shí)能夠完全在預(yù)設(shè)通道內(nèi)達(dá)到目標(biāo)區(qū)間。
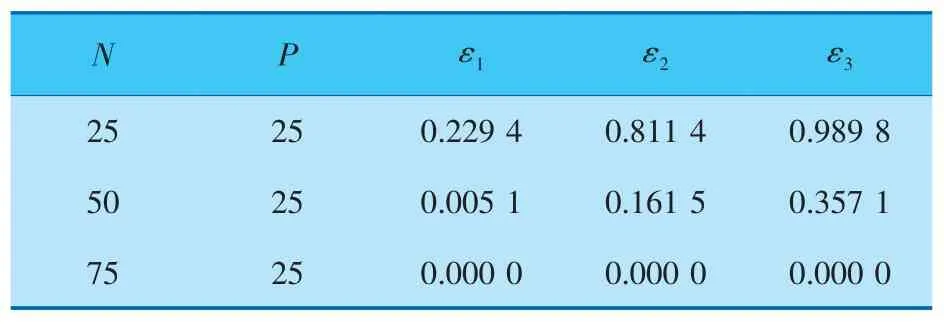
表3 輸出偏離預(yù)設(shè)通道程度
為了驗(yàn)證筆者所提方法的有效性,將漸變式橢球體區(qū)間預(yù)測(cè)控制算法與普通區(qū)間預(yù)測(cè)控制系統(tǒng)輸出結(jié)果進(jìn)行對(duì)比,結(jié)果如圖9所示。
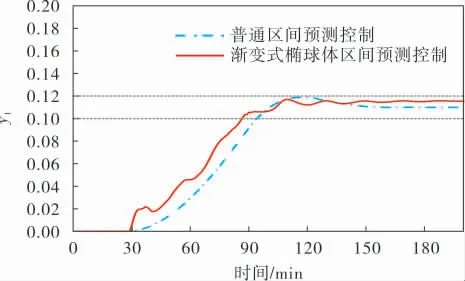
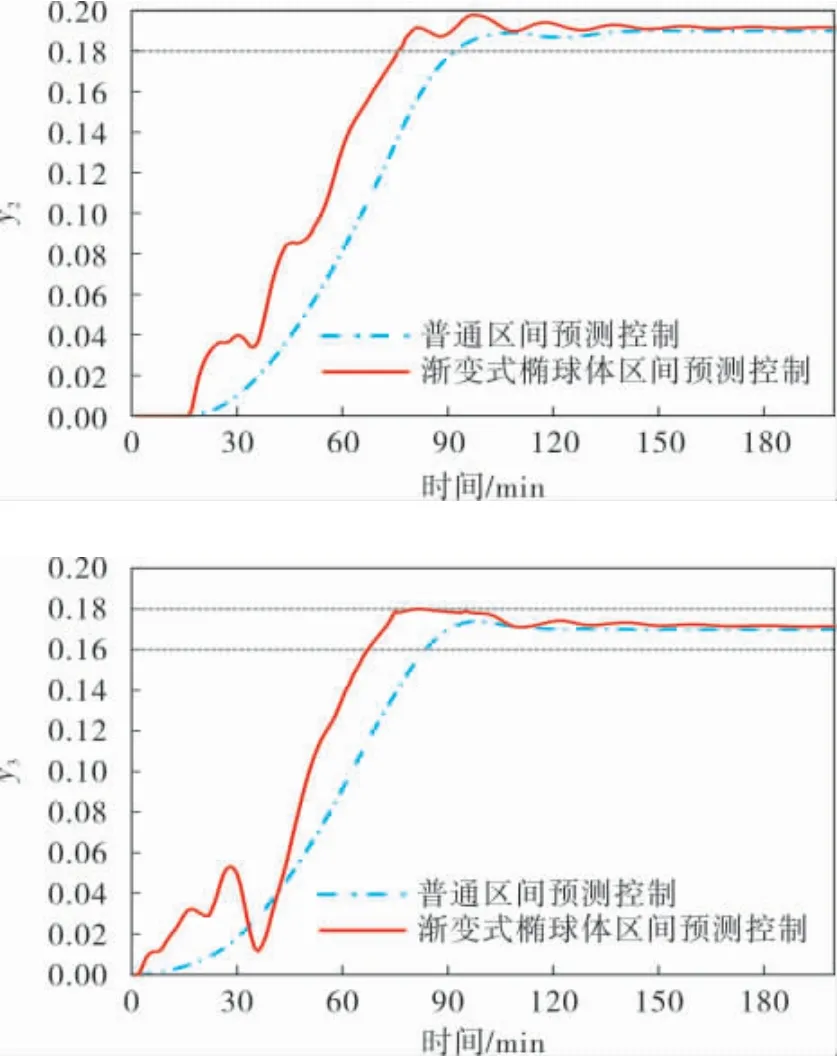
圖9 兩種控制方法的控制效果對(duì)比
控制目標(biāo)設(shè)置為以(0.11,0.19,0.17)為球心,半徑為0.1的球體區(qū)間。 仿真實(shí)驗(yàn)中預(yù)測(cè)時(shí)域P取40 min,球體序列約束個(gè)數(shù)N取80,在使得系統(tǒng)控制效果都穩(wěn)定的且不產(chǎn)生超調(diào)量的前提下,筆者所提漸變式橢球體預(yù)測(cè)控制算法有效提高了系統(tǒng)的響應(yīng)速度。
5 結(jié)束語(yǔ)
筆者在區(qū)間預(yù)測(cè)控制的框架下,提出基于漸變式橢球體區(qū)間的區(qū)間預(yù)測(cè)控制算法,該算法通過設(shè)置預(yù)設(shè)通道,使得被控變量在預(yù)設(shè)通道中進(jìn)入目標(biāo)區(qū)間。 同時(shí),基于此建立相應(yīng)的優(yōu)化問題。在預(yù)測(cè)時(shí)域值確定的情況下,找到兼具穩(wěn)定性與快速性的預(yù)設(shè)通道長(zhǎng)度的值,使得被控變量在不超出預(yù)設(shè)通道的前提下快速進(jìn)入目標(biāo)區(qū)間,提高了控制的整體性能。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
