基于飛秒激光電子激發標記測速技術的剪切流場速度測量
2022-09-26 08:40:10楊文斌陳力閆博王朝宗周江寧陳爽母金河王建新邱榮
實驗流體力學 2022年4期
楊文斌,陳力,閆博,王朝宗,周江寧,陳爽, *,母金河,王建新,邱榮
1. 中國空氣動力研究與發展中心 空氣動力學國家重點實驗室,綿陽 621000
2. 中國空氣動力研究與發展中心 設備設計與測試技術研究所,綿陽 621000
3. 西南科技大學 數理學院,綿陽 621010
0 引 言
在眾多流場參數中,流體的流動速度是最為基本的物理量,可以為評估飛行器的氣動性能提供重要參考。流場速度測量精度直接影響飛行器模型氣動系數測量的準確性,進而影響飛行器氣動性能的預測精度。目前常用的基于激光技術的非接觸式速度測量方法,如PIV(粒子示蹤測速法)、HTV(羥基標記測速法)、NO-PLIF(平面激光誘導熒光法)、IRS(干涉瑞利散射法)等,受粒子跟隨性等限制,已不能完全滿足流場速度高精度測量的需求。飛秒激光電子激發標記測速(Femtosecond Laser Electronic Excitation Tagging,FLEET)有望解決當前非接觸式測速技術存在的問題。
FLEET測速技術利用飛秒激光對空氣中大量存在的N分子進行標記,獲得長壽命的熒光,結合高速成像技術,通過追蹤被標記分子的運動軌跡,基于位移–時間關系實現流場速度的測量。在速度測量過程中,由于流場中存在大量的N分子,不需要另加任何示蹤粒子。FLEET技術不僅能夠應用于低速流動測量,在超聲速、高超聲速條件及邊界層、發動機燃燒室等復雜環境下,其可行性及可靠性也有所保證;并且FLEET技術不需要任何物理近似,具有極高的速度測量精度。由于誘導的電子熒光遠強于傳統散射信號,FLEET技術在低密度、低溫等特殊環境的速度測量中也頗具優勢。近年來,NASA、AEDC等機構已開展了FLEET技術在風洞試驗中的探索性應用研究工作。NASA Langley中心于2015年在0.3 m跨聲速低溫風洞(試驗參數:總壓100~400 kPa,總溫200~295 K,馬赫數0.20~0.75)中實現了該技術的初步應用。2016年,該機構在0.3 m跨聲速低溫風洞(試驗參數:總壓100~400 kPa,總溫100~325 K,馬赫數0.20~0.75)中開展了FLEET和Rayleigh散射同步測速實驗,并在2017年將FLEET技術應用于跨聲速翼面速度測量(試驗參數:總壓125 kPa,總溫280 K,馬赫數0.85)。2018年,AEDC的Dogariu等利用FLEET技術在超聲速風洞(馬赫數14)中開展了湍流邊界層測量試驗。2019年,Sandia國家實驗室Zhang等利用FLEET技術測量了尖錐模型(錐半角7°,底徑12.7 cm,尖端半徑<0.05 mm,長度0.517 m)在馬赫數8.0下的尾流流場速度分布。目前,FLEET技術已應用于可壓縮流、邊界層、湍流和火焰的速度測量。與其他分子標記測速方法相比,FLEET技術具有無需示蹤粒子、激發方案和探測方案簡單、動態范圍寬等優點。
鑒于FLEET技術的優點及其在(高)超聲速和復雜流場測量中的應用潛力,近年來國內科研機構(中國空氣動力研究與發展中心、天津大學等)也開展了飛秒激光在流場速度測量中的應用,但目前仍然處于探索階段,距風洞試驗應用還有較大距離,主要原因在于目前的研究工作主要為基礎研究,流場結構比較單一,而真實的風洞試驗流場結構相對復雜(如剪切、轉捩以及各種渦結構)。本文搭建了FLEET速度測量系統,分析了FLEET熒光信號的時間演化規律、光譜構成及其來源,明確了FLEET測速技術適用的延遲時間。在射流剪切裝置上開展了剪切流場速度測量實驗,研究了延遲時間、流場速度對測量結果的影響,測量了不同高度下的流場速度及剪切層厚度。
1 理論基礎
將飛秒激光聚焦于待測流場區域,由于多光子電離效應,沿飛秒激光聚焦路徑的一段區域被解離,從而完成N分子的標記過程。解離的原子復合產生激發態分子,當激發態分子向低能級躍遷時會輻射出熒光信號,該物理過程如圖1(a)所示,其中,k、n、m表示3個不同的激發態。
當標記分子隨流場運動時,相應的電子熒光也會在氣流傳輸方向發生位移,在FLEET熒光信號壽命范圍內可以利用探測器記錄不同時刻標記分子的位置(如圖1(b)所示,t、t、t表示3個不同時刻),利用質心法、曲線擬合法、Hessian矩陣法等算法實現FLEET熒光信號位置的亞像素提取,基于標記分子的時間–位移關系獲得流場速度和結構。
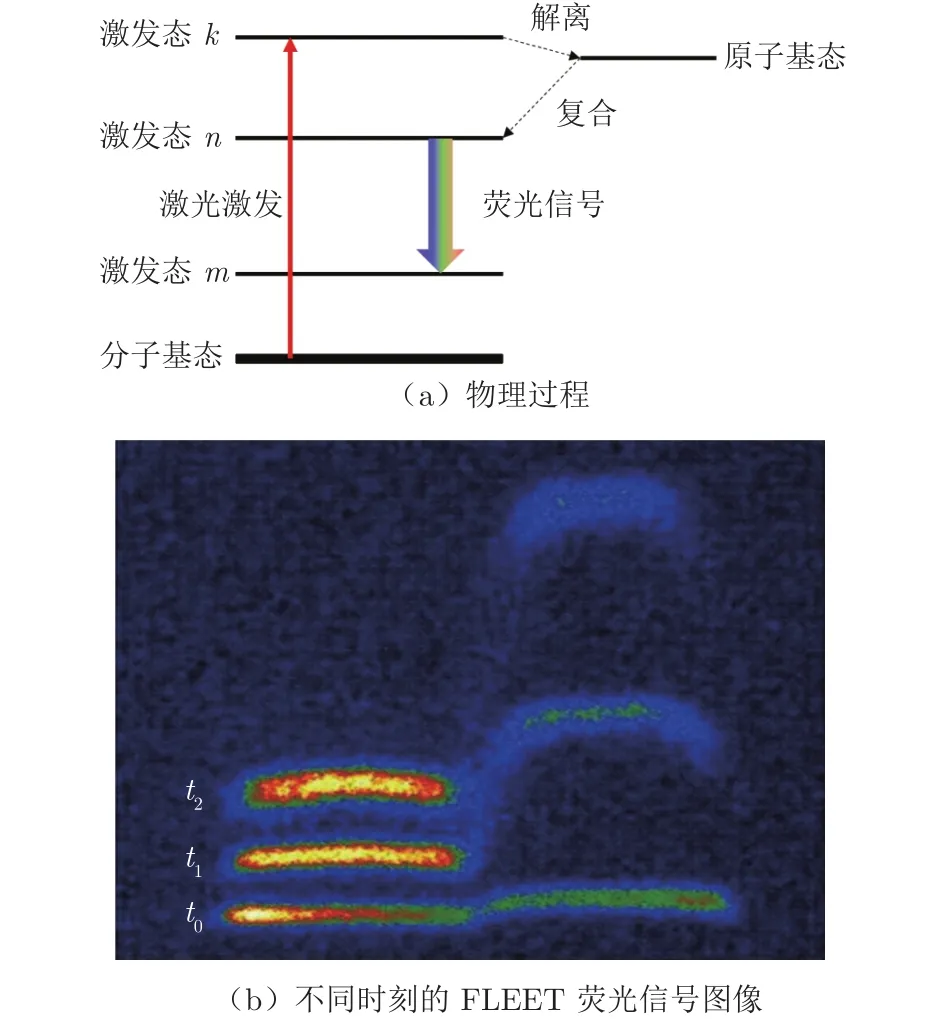
圖 1 FLEET技術N2標記物理過程及圖像Fig. 1 FLEET nitrogen tagging mechanism and images
對于一維速度測量,采用質心法獲取FLEET熒光信號的中心位置:
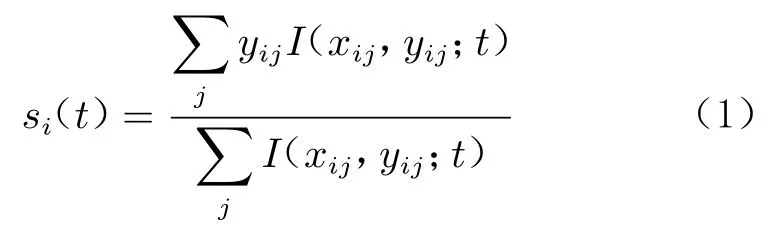
式中,s(t)為t時刻x處FLEET熒光信號的中心位置,I(x,y;t)為預處理(去背景、降噪)后t時刻的FLEET熒光信號圖像強度,x,y分別為激光傳輸方向和流向,下標i、j表示二維矩陣中熒光圖像的第i行、第j列。流場速度v可由2個不同時刻(時間間隔Δt)的FLEET熒光信號中心位置計算得出:

2 實驗及裝置
FLEET測速系統如圖2所示。FLEET系統由激勵光源、光路系統、數據采集系統和時序控制系統4部分組成。光源為中心波長800 nm的鈦藍寶石飛秒激光,輸出脈寬為45 fs。當光源頻率為1000 Hz時,單脈沖最大輸出能量為10 mJ。光路系統包括半波片(H1)、偏振片(P1、P2)、聚焦透鏡(L1、L2、L3)和帶通濾光片(BP)等。半波片用于防止反射光返回激光器,壁免對其輸出造成影響甚至損壞。偏振片用于調節飛秒激光能量。飛秒激光經聚焦透鏡L1(焦距為400 mm)聚焦于待測流場區域,激發流場中的N進行標記。帶通濾光片用于濾除FLEET熒光信號外的雜散光干擾。數據采集系統包括ICCD相機和光纖光譜儀。ICCD相機用于記錄標記分子在流場中的位置,測量過程中ICCD積分時間為120 ns,空間分辨率為21 μm/像素。光纖光譜儀用于記錄標記分子的FLEET熒光信號。DG535信號發生器用于控制飛秒激光器的時序關系以及ICCD相機的時序關系和積分時間。
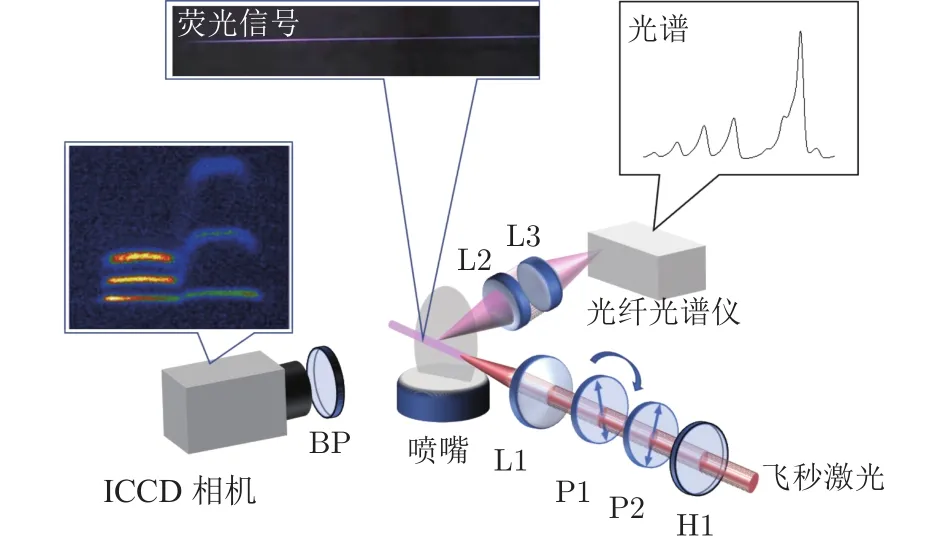
圖 2 FLEET測速系統示意圖Fig. 2 Schematic diagram of FLEET experimental setup
剪切流場噴嘴以及出口位置處的坐標系如圖3所示,噴嘴出口為矩形(5 mm×5 mm),通道1為低速通道,通道2為高速通道。調節噴嘴中雙通道的流量/壓力可以獲得不同結構的剪切流場。
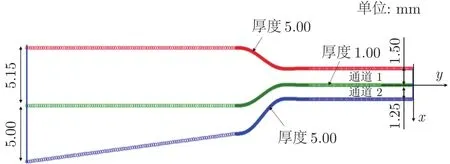
圖 3 剪切流場噴嘴結構示意圖Fig. 3 Schematic diagram of shear flow nozzle
3 實驗結果與分析
3.1 FLEET熒光信號光譜分析

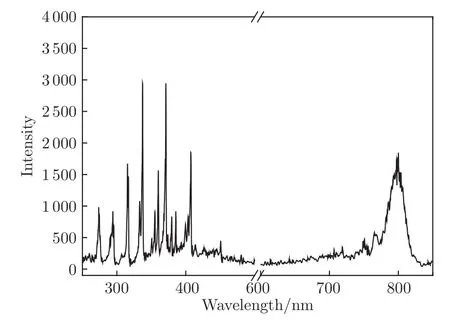
圖 4 FLEET熒光信號250~850 nm波段光譜Fig. 4 The spectrum from 250 nm to 850 nm of FLEET signal
不同延遲時間t下的雙低速剪切流場(雙通道流量均為10 L/min)FLEET熒光信號如圖5所示。可以看到,FLEET熒光信號可以持續到300 μs,具有足夠的信號強度用于流場速度測量。但隨著延遲時間的增加,FLEET熒光信號會在空間上發生彌散,導致測量的不確定度增加。對圖5中的FLEET熒光信號強度進行積分,得到其隨延遲時間的演化關系,如圖6所示。FLEET熒光信號強度隨延遲時間的增加而急劇增大,隨后緩慢衰減。這是由于流場中N分子在飛秒激光作用下發生多光子電離,產生的自由電子碰撞激發周圍的分子,導致FLEET熒光信號強度的急劇增大;隨著電子與分子的碰撞,分子不斷失去能量,激發態的分子數不斷減少,導致時間和積分強度,I為背景信號積分強度)對FLEET熒光信號積分強度進行擬合,結果顯示FLEET熒光信號強度上升和衰減過程的特征時間分別為20 ns和190 μs。
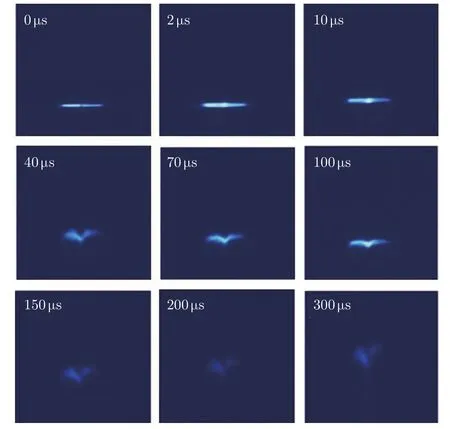
圖 5 不同延遲下的剪切流場FLEET熒光信號Fig. 5 FLEET signal of shear flow with different delays.
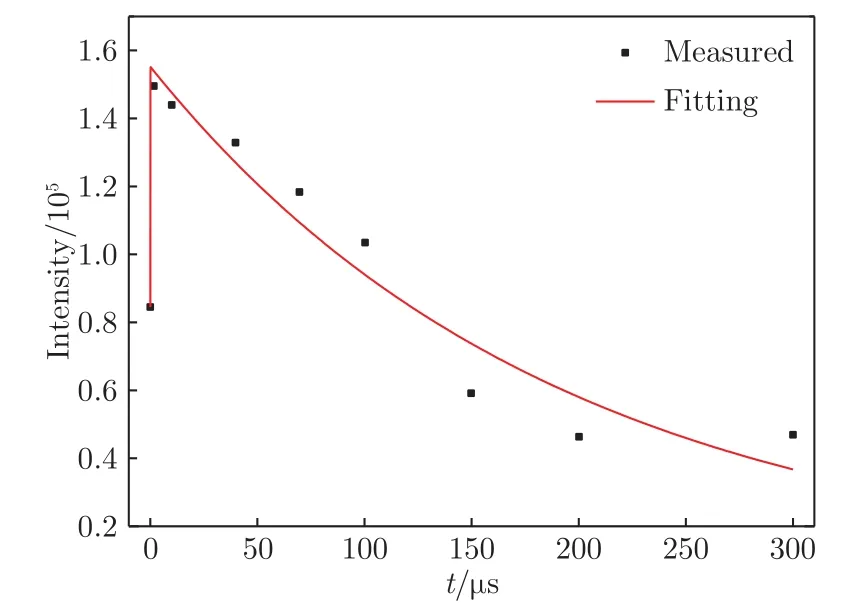
圖 6 實測FLEET熒光信號及擬合結果Fig. 6 Measured FLEET signal and corresponding fitting results
3.2 剪切流場FLEET測速
基于搭建的FLEET測速系統,開展了剪切流場FLEET測速實驗。實驗中,工作氣體為N,測量位置在噴嘴上方y=2 ~15 mm之間,參數設置如表1所示,其中工況1~4為雙低速剪切流場,工況5~7為高速剪切流場。由于實驗條件限制,本文只對 30~170 m/s 流速范圍的剪切流場進行了實驗研究。
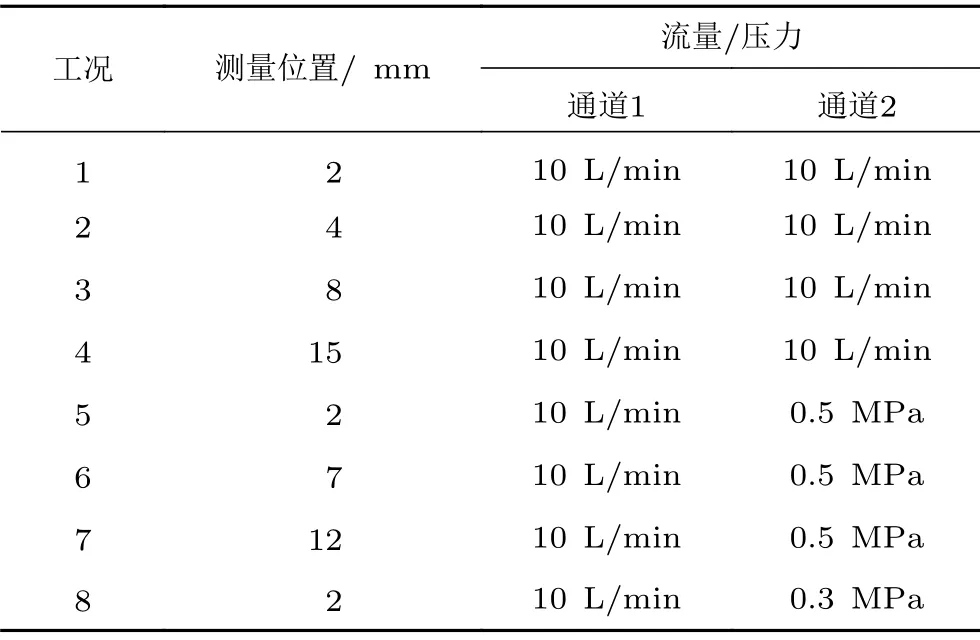
表 1 剪切流場FLEET測速中的實驗參數Table 1 Experimental parameters of FLEET velocimetry in shear flow
在不同延遲時間下,剪切流場的FLEET熒光信號分布及速度測量結果如圖7和8所示。圖7(a)為工況1的FLEET熒光信號分布,標記分子隨流場運動,不同時刻的FLEET熒光信號位置不同,通過追蹤標記分子的運動軌跡可以反演出流場的速度分布。圖7(b)為工況1流場的速度反演結果,插圖為噴管中心(x=0)處的速度隨延遲時間的變化。可以看到,不同延遲時間下反演的速度分布基本一致,但在剪切流場區,流場速度反演結果隨延遲時間的增大而增大,流場速度測量結果的標準差(用于表征多次測量結果間的離散程度)明顯高于其他流場區域,不確定度(標準差與平均值之比)最大值為10.22%,這是由于剪切流場區的速度/壓力梯度使得標記分子的彌散效應增強,并且這種彌散效應隨著延遲時間的增加而增大,從而導致測量結果不確定度的增大。圖8為工況5的FLEET熒光信號分布及速度測量結果。同樣地,剪切流場區的速度測量結果標準差存在整體增大現象,不確定度最大值為5.58%,相比于工況1的測量結果,FLEET技術在較高速度流場下具有更低的不確定度。除此之外,對比圖7(b)和8(b)中通道1(x<0)和2(x>0)出口前方流場(即y>0區域)的速度測量結果可以發現,通道2出口前方流場速度測量結果的標準差較大,這主要是由等離子體對飛秒激光的散焦作用引起的:在通道1出口前方流場,飛秒激光在等離子體的散焦作用下光斑發生彌散,引起通道2出口前方流場中產生的等離子體半徑增大和FLEET熒光信號強度降低,從而引起標記分子位置測量誤差,速度測量結果不確定度增大。
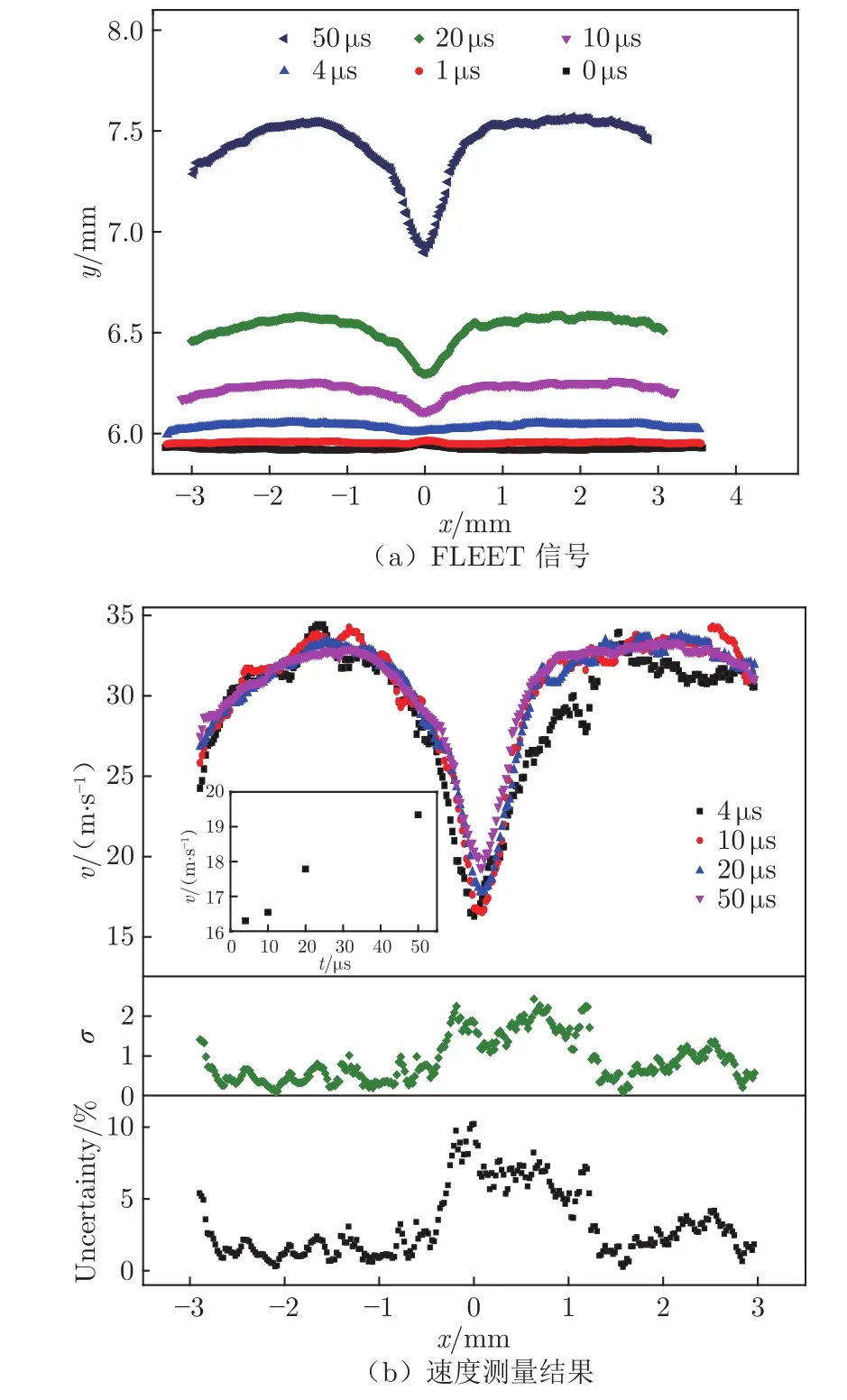
圖 7 工況1不同延遲下的FLEET信號及速度測量結果Fig. 7 FLEET signal and corresponding calculated velocities with different delays of case 1
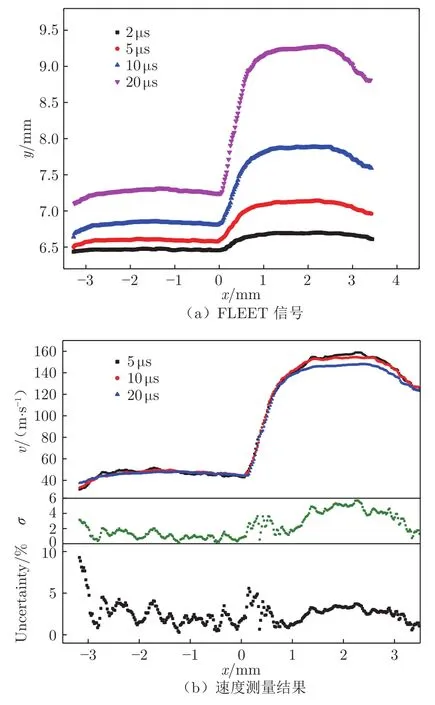
圖 8 工況5不同延遲下的FLEET信號及速度測量結果Fig. 8 FLEET signal and corresponding calculated velocities with different delays of case 5
雙低速剪切流場(工況1~4)在不同測量高度y下的速度測量結果如圖9所示。對于雙低速剪切流場,x=0處的速度隨著y的增大而增大。為研究射流混合區域隨y的變化,對噴管中心位置兩側1 mm范圍內(即x為–1~0 mm和0~1 mm)的速度進行線性擬合(圖9中的2條黑色直線表示y=2 mm時的擬合結果)。本文用2條直線夾角的變化表征混合區域的變化,如圖9(b)所示,夾角隨y的增大從6.5°增大至31.0°,x=0處的速度隨著y的增大從17.7 m/s增大至26.8 m/s。
高速剪切流場(工況5~7)在不同測量高度y下的速度測量結果如圖10所示。在G?rtler理論中,剪切層厚度為流體速度接近零的點與接近核心射流速度u的點之間的距離。為使剪切層厚度計算不受邊界選擇的影響,引入動量厚度:

式中,u為剪切層軸向速度。剪切層厚度可由= 4計算得到。為了定量描述雙射流混合區域的剪切層厚度,令u=u–u,u=u–u,其中u為實測流場速度,u和u分別為低速、高速射流速度,將u/u歸一化至[0,1]區間。由此得到的如圖10(b)所示,隨y增大從0.71 mm增大至1.83 mm,并且符合線性關系,其校正決定系數R=0.9750。
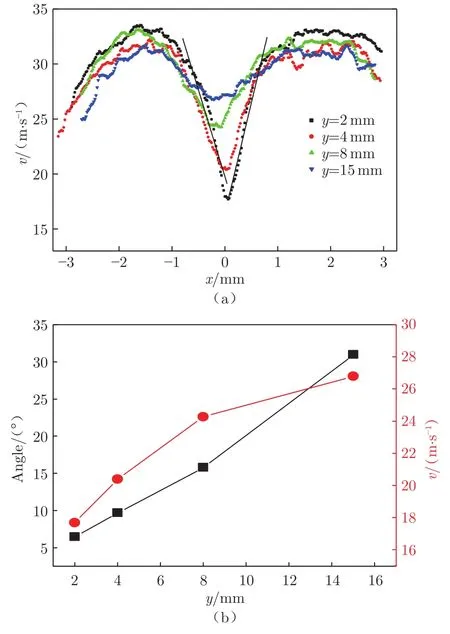
圖 9 剪切流場不同高度速度測量結果Fig. 9 Measured velocities with different heights in shear flow
不同射流速度(工況1、5、8)下y=2 mm處的剪切流場速度測量結果如圖11所示。對于雙低速剪切流場(工況1),x=0處的速度存在一個極小值。隨著通道2射流速度的增大,x=0處的速度隨之增大,當通道2射流壓力增大至0.5 MPa時(工況5),x=0處的速度已趨近于通道1外的流場速度,可以預見,隨著通道2射流速度的繼續增大,x=0處的速度將繼續增大且極小值消失。除此之外,通道2射流速度對通道1外的流場速度產生了一定的影響,使之隨通道2射流速度的增大而增大。
3.3 FLEET實驗結果與仿真結果對比
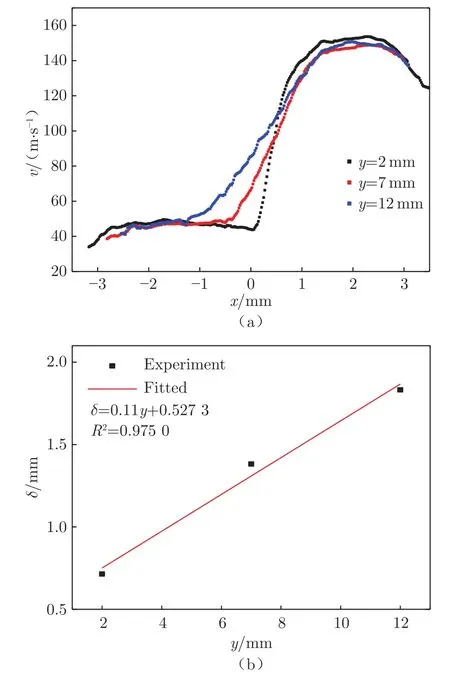
圖 10 剪切流場不同高度的速度分布及剪切層厚度Fig. 10 Velocity distribution and shear layer thickness with different heights in shear flow
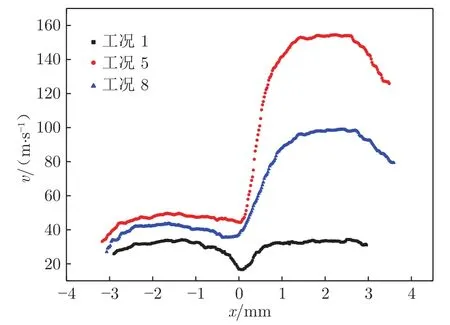
圖 11 不同射流速度時y = 2 mm處的剪切流場速度Fig. 11 Velocity distribution at 2 mm with different jet velocities
為了驗證FLEET實驗測量結果的可靠性,對剪切流場進行了計算流體力學(Computational Fluid Dynamics,CFD)仿真。數值求解采用SIMPLE算法,壓力采用二階差分格式,動量采用二階迎風差分格式,湍流動能和比耗散率采用一階迎風差分格式。通道1和2流量均設置為10 L/min時的仿真結果如圖12(a)所示;通道1流量設置為10 L/min、通道2壓力設置為0.5 MPa時的仿真結果如圖12(b)所示。由圖可見,在通道1和2之間存在一個流速均小于通道1和2的低速區。當通道1和2流速相等時,低速區會在很長的范圍內存在;當通道1和2流速存在較大差異時,低速區的長度減小,可見通道1和2的流速差異對剪切流場速度分布影響較大。
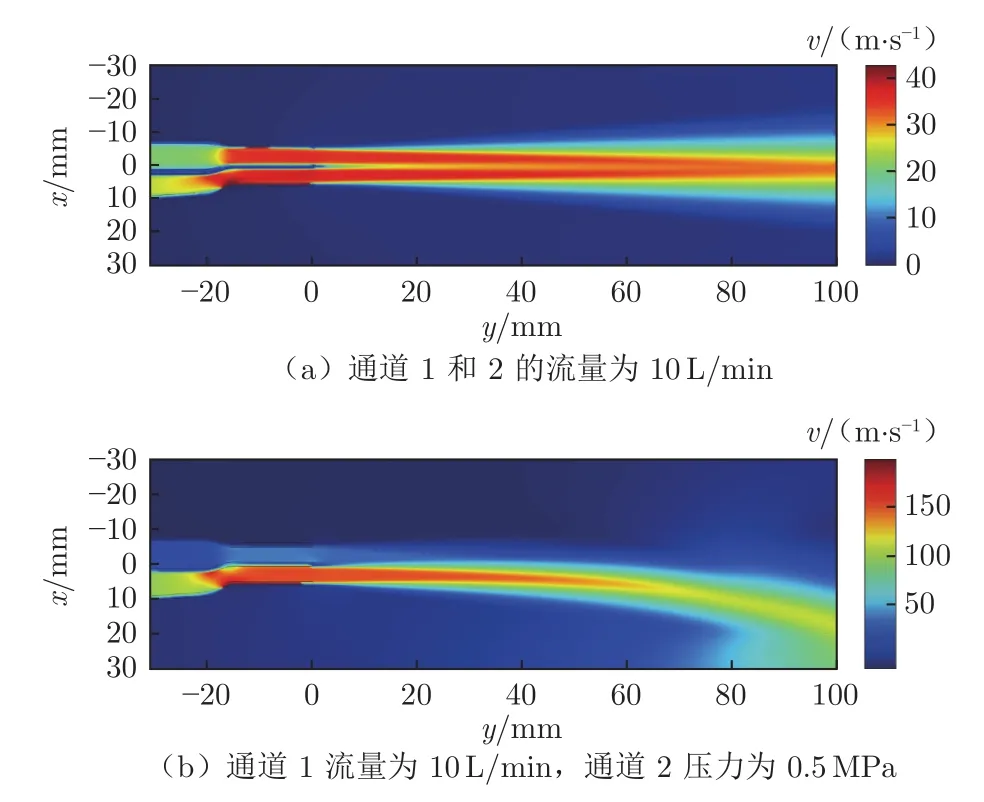
圖 12 剪切流場速度分布仿真結果Fig. 12 Simulated velocity distribution of shear flow
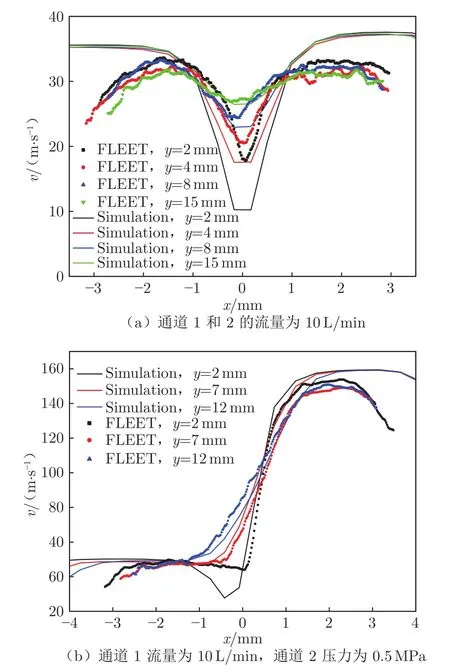
圖 13 剪切流場速度分布仿真結果與FLEET測量結果對比Fig. 13 Comparison between simulation velocity distributions and FLEET measurement results of shear flow
通道1和2流量均設置為10 L/min時,不同高度y下工況1~4流場速度的仿真結果與FLEET實驗測量結果如圖13(a)所示。當雙通道流速相同時,仿真結果和實驗測量結果都顯示出相同的剪切流場速度分布,噴管中心(x=0)處速度存在一極小值,在雙通道各自的射流中心位置速度達到極大值。通道1流量設置為10 L/min、通道2壓力設置為0.5 MPa時,不同高度y下工況5~7流場速度的仿真結果與FLEET實驗測量結果如圖13(b)所示。當由流速差異較大的雙通道形成剪切流時,仿真結果和實驗測量結果依然都顯示出相同的剪切流場速度分布,當測量位置靠近噴管出口(即y較小)時,在噴管中心(x=0)處存在速度極小值。值得注意的是,仿真結果和實驗測量結果存在一定的偏差,且y=2 mm時x=0處的偏差較大,該偏差會隨著y的增大而減小,其主要原因是在仿真過程中忽略了噴管隔板厚度的影響,特別是噴管中心(x=0)處的隔板厚度。此外,加工工藝等因素導致實驗裝置與仿真模型存在一定的差異,進一步增大了實驗測量結果和仿真結果間的偏差。
4 結 論
本文基于飛秒激光器搭建了FLEET速度測量系統,分析了FLEET熒光信號的時間演化規律、光譜構成及其來源,在射流剪切裝置上開展了剪切流場速度測量實驗,研究了延遲時間、流場速度對測量結果的影響,測量了不同高度下的流場速度及剪切層厚度,驗證了FLEET技術用于測量剪切流場的可行性。結論如下:
1)FLEET熒光信號主要來源于N第二正帶系和N第一負帶系,隨延遲時間的增大而急劇增大,隨后緩慢衰減,上升和衰減過程的特征時間分別為20 ns和190 μs。
2)不同延遲時間下反演的流場速度分布基本一致,但在剪切流場區,速度/壓力梯度使得標記分子的彌散效應增大,且這種彌散效應隨著延遲時間的增加而增大,導致剪切流場區域不同延遲時間下流場速度反演結果的不確定度(5%~10.22%)明顯高于其他流場區域(除邊緣區域外,不確定度在3%以內),但這種不確定度會隨著射流速度的增大而減小,表明FLEET測速技術在較高速度流場測速中具有更高的準確性。由于實驗條件限制,本文只對30~170 m/s流速范圍的剪切流場進行了實驗研究。理論上,流場速度越高,FLEET熒光信號的位移距離越大,彌散效應和測量誤差引起的不確定度越低。因此,FLEET技術在高速流場測量中的應用潛力和測量精度都比低速流場更高,理論上不存在速度測量上限。
3)對于雙低速剪切流場,在不同測量高度下,噴管中心位置的速度隨著測量高度的增大而增大;對于高速剪切流場,剪切層厚度隨測量高度的增大從0.71 mm增大至1.83 mm。
4)仿真結果和實驗測量結果都顯示出相同的剪切流場速度分布。在噴管中心處,仿真結果和實驗測量結果的偏差會隨著與噴管出口的距離增大而減小,主要原因是仿真過程中忽略了噴管隔板厚度的影響。