豬舍靜電除塵器細顆粒脫除效應數值模擬及試驗*
2022-09-21 03:06:26胡捷文建萍黎波楊衛平肖志鋒
中國農機化學報 2022年10期
關鍵詞:效率
胡捷,文建萍,黎波,楊衛平,肖志鋒
(1. 江西農業大學工學院,南昌市,330045; 2. 江西省畜牧設施技術開發工程研究中心,南昌市,330045)
0 引言
豬場中的顆粒物可分為細顆粒物(PM2.5,空氣動力學直徑分別≤2.5 μm)和可吸入顆粒物[1],其中PM2.5是細菌、病毒傳播的載體,產生巨大的危害[2-3]。此外,細菌、病毒、NH3會吸附在豬舍PM2.5表面發生物理和化學反應形成危害性更強的二次污染[4-7]。因此,豬舍顆粒污染物脫除關系到舍內外人畜健康及周邊環境空氣質量。
豬舍EP可對顆粒物進行有效脫除[8-9]。吳新構建了一套EP系統,在保育豬舍內進行試驗,結果表明該系統能夠去除70%的粉塵;王樹華等[10]在保育豬舍內使用3DDF-450型EP系統,與對照豬舍相比后發現該系統最大可降低72.59%的舍內TSP濃度(P<0.01)。然而,上述試驗結果同時表明EP對細顆粒PM2.5的脫除效率比大顆粒要低。EP對豬舍顆粒污染物的捕集能力與EP內電場和流場特性密切相關[11]。但是,強電場的存在給EP內含塵氣體的流動和顆粒輸運的直接測量帶來極大的困難[11]。在此情況下,數值模擬成為揭示豬舍EP內輸運行為,實現豬舍EP對細顆粒脫除工藝優化的有效工具[12-13]。
本文針對豬舍細顆粒PM2.5脫除效率低的問題,重點開展顆粒在EP內的輸運行為研究。將采用多場耦合數值方法,分析豬舍線板型EP內電場、流場和細顆粒運動的特性,通過可視化試驗驗證電暈線電壓、流場流速對細顆粒物捕集效率的控制規律,提高豬舍空氣質量。
1 設計與方法
1.1 工作原理
靜電除塵器(Electrostatic precipitator, EP)主要由電暈線(Corona wire, CW)、捕塵極板(Collecting plate, CP)、氣溶膠通道、靜電控制組件等組成,該器件又稱為靜電空間電荷系統(Electrostatic Space Charge System, ESCS)。ESCS系統一般安裝在天花板等不易接觸的位置,對人畜無干擾、維護要求低,如圖1所示。在當下集約化、封閉化的豬舍中,大氣中的含塵空氣通過進風系統進入豬舍中,含塵氣流混合豬舍內產生的顆粒污染物通過舍內空氣流動進入ESCS系統入口,由電暈效應使得顆粒帶電,顆粒物或粉塵在電場力和流體曳力的共同作用下向捕塵極板聚集,實現顆粒污染物的吸附。含塵氣流通過ESCS系統后不僅輸出干凈、綠色的空氣至豬舍內部,同時通過排風系統輸出至豬舍外部,提高了豬舍內外的空氣質量,形成綠色、低排放的豬養殖場空氣循環。

圖1 豬舍靜電除塵器工作原理示意圖
1.2 可視化豬舍顆粒脫除試驗
顆粒污染物輸運可視化試驗平臺如圖2所示,該裝置包括:氣溶膠顆粒發生系統、風機、氣溶膠流道、高壓電源、高速相機、顆粒物荷電量裝置、DP-02激光粒度儀、計算機、流速傳感器。
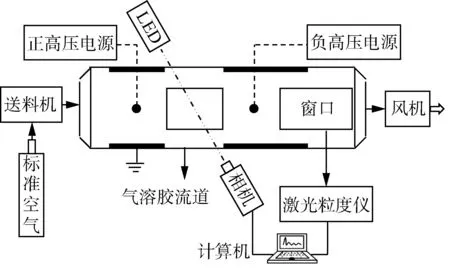
圖2 顆粒污染物輸運可視化試驗平臺
采用蚊香顆粒來研究PM2.5粒徑范圍及物性特征顆粒物的運動及捕集特性。通過氣溶膠顆粒發生系統產生蚊香顆粒的方法為:蚊香置于容積為50 L的不銹鋼儲煙罐中,通過壓縮空氣瓶提供燃燒所需要的標準空氣,空氣流量由ALICAT 21系列標準型數字質量流量控制器來控制。試驗中,需要根據可視化系統的拍攝要求選擇合適的氣流速度,通過調節送料機入口處的給氣壓力調節旋鈕,可以實現對氣流速的控制。
蚊香氣溶膠流道采用特氟龍材質,內部尺寸為50 mm×40 mm×1 000 mm,在距入口200 mm處和800 mm處前后開有石英玻璃觀察窗口,距入口100 mm 處水平插入直徑1 mm的不銹鋼針電極,電極上下流道內壁面嵌有接地鋼極板,同時,距出口400 mm 處水平等距插入4根直徑1 mm的不銹鋼針電極,其間距為100 mm,電極上下流道內壁面嵌有接地鋼極板,其作為電暈放電區。石英玻璃窗口處為可視化觀測界面。
高壓電源的型號為TRC2020P50-150,其輸出參數為:電壓0~±100 kV連續可調,電流0~3 mA連續可調,分別通過正、負直流電源實現對顆粒物的荷電。利用DP-02型激光粒度儀可實現對顆粒物氣溶膠粒徑分布變化和濃度的實時在線檢測,激光粒度儀與電腦連接,通過計算機中分析軟件可以得到輸出顆粒的濃度分布,進而獲得捕塵極板上的顆粒濃度,最終獲得顆粒捕集效率。該試驗驗證裝置的除塵效率可由式(27)表征。
1.3 數學模型
1.3.1 電暈模型
1) 基本假設。(1)忽略電暈放電產生的磁場。(2)在靜電除塵器內,電荷移動速度約100 m/s,空氣的流速約為1m/s[14],因此空氣流動對電場分布的影響可以忽略。(3)電遷移率恒定。
2) 控制方程。電暈模型采用電荷守恒方程和泊松方程求解載流子的傳輸問題。載流子的傳輸包括電場漂移和對流。沒有源項,域方程
·J=0
(1)
J=zqγρqE+ρu
(2)
ε02V=-ρq
(3)
式中:J——電流密度;
zq——電荷數;
γ——電遷移率;
ρq——空間電荷數密度;
E——電場;
u——流體速度;
V——電勢;
ε0——真空介電常數。
可以修改這組方程以獲得控制方程
(4)
值得注意的是,域方程不包含任何與等離子體產生和維持有關的信息。所有等離子體物理場都縮減在內電極的邊界條件中。
3) 邊界條件。電暈電極上電場的法向分量用作泊松方程的邊界條件
n·E=E0
(5)
泊松方程的其他邊界條件是捕塵極板上的V=0以及入口和出口處的零電荷。方程(4)的邊界條件涉及采用拉格朗日乘子求得電暈電極上的空間電荷密度ρq,從而驗證施加的電勢V0。
V-V0=0
(6)
在模型中,電勢和電場都施加在電暈電極上。為了獲得預測結果,電暈處電場值必須足夠接近真實值。這里用的是匹克定律
(7)
式中:E0——擊穿電場;
δ——133.322 Pa、293.15 K下歸一化到氣體密度的氣體數密度;
ri——電暈電極的直徑。
1.3.2 湍流模型
1) 基本假設。(1)靜電除塵器內空氣是不可壓縮牛頓流體。(2)含塵氣體經過濕簾、過濾等一次除塵進入豬舍內。進入靜電除塵器的氣體僅含有少量的大顆粒粉塵和小顆粒粉塵,粉塵濃度很低,因此顆粒的存在對流體運動的影響可以忽略[15-16]。


(8)



u′——速度脈動;

(9)
式中:μT——湍流動力黏度。
因此只需求出μT即可。通過引入兩個額外的傳遞方程和兩個變量(湍動能k和湍動能耗散率ε)可求出μT。k-ε模型
(10)
(11)
(12)
式中:k——湍動能;
ε——湍動能耗散率;
σk、σε——k、ε對應的普朗克常數;
Cμ、Cε1、Cε2——經驗常數,其值如表1所示。
k-ε模型由式(10)~式(12)構成,其中式(10)~式(12)分別為湍流黏度方程,湍動能k輸運方程及生成項,湍動能耗散率ε輸運方程。本文利用式(8)~式(12) 對豬舍內流場進行建模求解,以獲得舍內的速度、壓力和渦量分布。
表1 經驗常數Tab. 1 Empirical constant
3) 邊界條件。(1)在壁面處采用無滑移邊界條件。(2)在出口處,應用壓力出口條件。
1.3.3 顆粒追蹤模型
1) 基本假設。(1)忽略顆粒之間的相互作用。(2)顆粒在到達捕塵極板之后會被完全吸附,不會有顆粒反彈。
2) 控制方程。遵循牛頓第二定律,通過求解顆粒位置矢量分量的二階運動方程來計算顆粒位置,表達式
(13)
式中:q——顆粒位置;
v——顆粒速度;
mp——顆粒質量;
Ft——施加在顆粒上的總力。
模型中,作用在顆粒上的力是曳力和電力。由于顆粒半徑變得非常小,因此曳力中需要包含稀薄效應。這里,曳力FD用Cunningham-Millikan-Davis模型
(14)
式中:τp——顆粒速度響應時間。
(15)
式中:ρp——顆粒的密度;
dp——粒徑;
CD——曳力系數;
Rer——相對雷諾數。
(16)
S是曳力校正系數,定義
(17)
式中:Kn——無量綱系數。
作用在顆粒上的電力Fe(SI單位:N)定義
Fe=eZE
(18)
式中:e——是元電荷;
Z——每個顆粒上的累積電荷數。
使用Lawless模型計算顆粒上累積的電荷,表達式
(19)
式中:τc——特性充電時間。
(20)
式中:kB——玻爾茲曼常數;
Ti——離子溫度。
Rf和Rd分別是由場和擴散傳輸引起的無量綱充電速率,定義
(21)
(22)
式(21)和式(22)中,ve和vs分別表達
(23)
(24)
(25)
式中:εr,p——顆粒的相對介電常數;
fa——將擴散充電速率和場充電速率相結合的函數。
(26)
捕集效率是衡量靜電除塵器性能的重要指標。
(27)
式中:η——捕集效率,無量綱;
N1——靜電除塵器入口處顆粒數量;
N2——靜電除塵器出口處顆粒數量。
3) 邊界條件。電暈線:采用對稱邊界條件。
1.3.4 計算條件、計算方法和收斂標準
參照通用型3DDF-450、3DDF-300等靜電除塵器的幾何尺寸,模擬需要的器件幾何參數和物性參數分別如表2、表3所示。
表2 靜電除塵器幾何尺寸范圍Tab. 2 Dimension scope of electrostatic precipitator

表3 靜電除塵器物性參數Tab. 3 Physical parameters of EP
采用有限元法(Finite Element Method, FEM)對二維模型進行網格劃分,局部網格如圖3所示。本文采用自由剖分三角形網格,網格大小為標準,最大單元尺寸3.5 mm,最小單元尺寸0.1 mm,最大單元生長率為1.13,曲率因子0.3,狹窄區域解析度1。對于捕塵極板附近及電極線附近設置邊界層并進行網格加密,邊界層數為2,邊界層拉伸因子為1.2,厚度調節因子為5。整個計算域劃分為25 272個三角形網格。并利用MATLAB求解上述偏微分方程。電場計算收斂標準為
(28)
(29)
式中:K——迭代次數。
在流場計算過程中,采用SIMPLE算法處理壓力和速度的耦合。收斂標準為
(30)
(31)
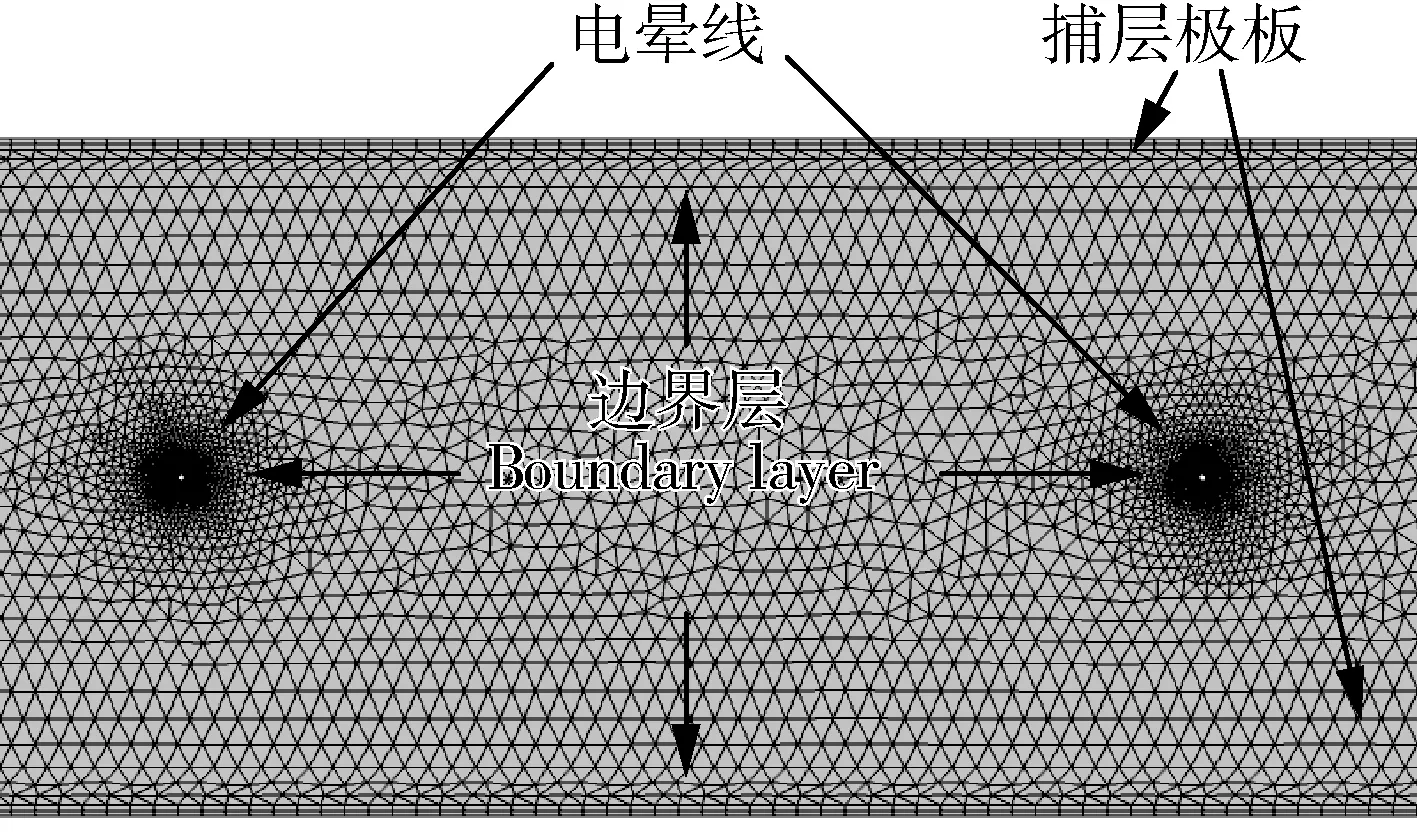
圖3 局部網格
2 模型驗證
2.1 電勢分布
圖4給出了文獻[17]的電勢測量試驗點位置A-A。計算過程中,參照文獻中電勢探針測量X=228.6 mm 處電勢剖面的電勢分布,X表示以入口為起點的橫軸位置,Y表示X=228.6 mm位置上以捕塵極板為起點到電極的縱軸位置。結果表明靜電除塵器內的電勢分布是不均勻的,電極線周圍電勢最高。將X=228.6 mm剖面下測量的電勢與試驗值進行了比較,如圖5所示,表明電勢的數值解和文獻[17]的試驗數據值吻合良好,計算得到的電勢分布與試驗結果在誤差范圍內,說明數值模擬建立的電勢是正確的。

圖4 文獻[17]的靜電除塵器

圖5 電勢計算值與試驗值對比
2.2 流場分布
靜電除塵器的流場計算采用文獻[19]的試驗條件,數值模擬分別采用了RNGk-ε湍流模型。圖6表明,使用該模型得到的流場流體速度非常接近試驗值,在56 mm處計算獲得的流體速度與試驗值誤差最大,為12.4%。需要指出的是,10 mm,90 mm分別為靠近收塵極和電暈線處;由圖可知,該兩處的計算結果與試驗結果的誤差較小。同時,文獻指出在捕塵極板處,存在明顯的回流區,而在電暈線處存在明顯的邊界層分離現象。因此,RNGk-ε湍流模型對靜電除塵器內流場的計算結果比較準確。
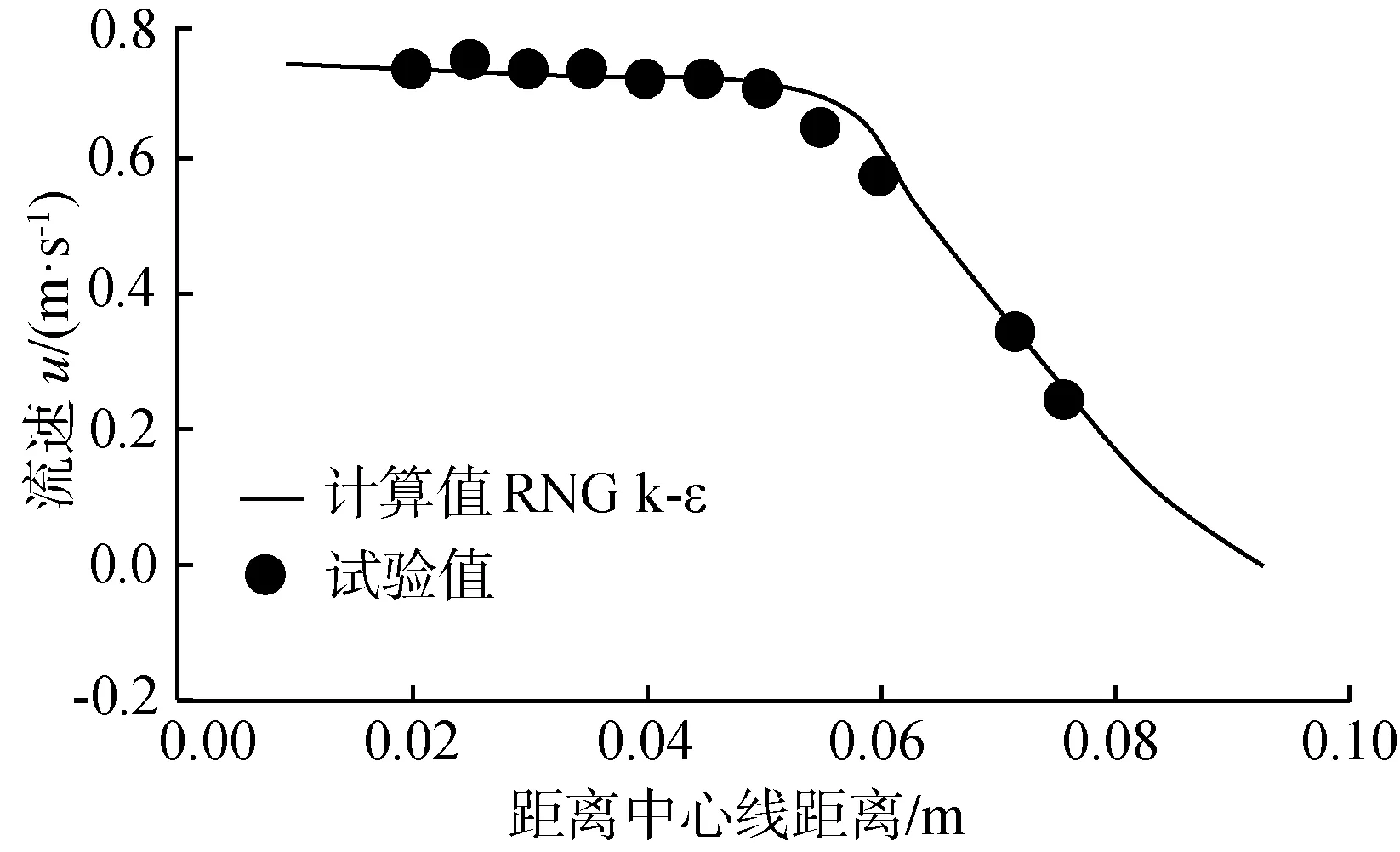
圖6 流速計算值與試驗值對比
2.3 捕集效率計算
靜電除塵器的收塵率計算采用文獻[20]的試驗條件,采用RNGk-ε模擬獲得的數值結果如圖7所示。在不同入口速度下,靜電除塵器收塵效率的預測值與試驗值基本吻合。當入口流速從0.15 m/s上升到0.35 m/s 時,顆粒捕集效率η有明顯下降,顆粒捕集效率從81.2%下降到64.5%。當入口速度為0.25 m/s 時,模擬值與試驗值相對誤差最大,其值為2.6%,該誤差同時證明了本文數值建模與求解的準確性和合理性。
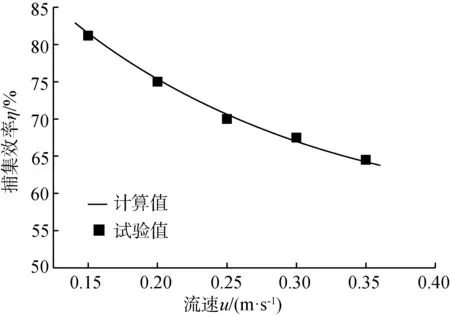
圖7 不同速度下收塵效率的計算值與試驗值
3 結果與討論
3.1 靜電除塵器內電勢和電荷密度分布
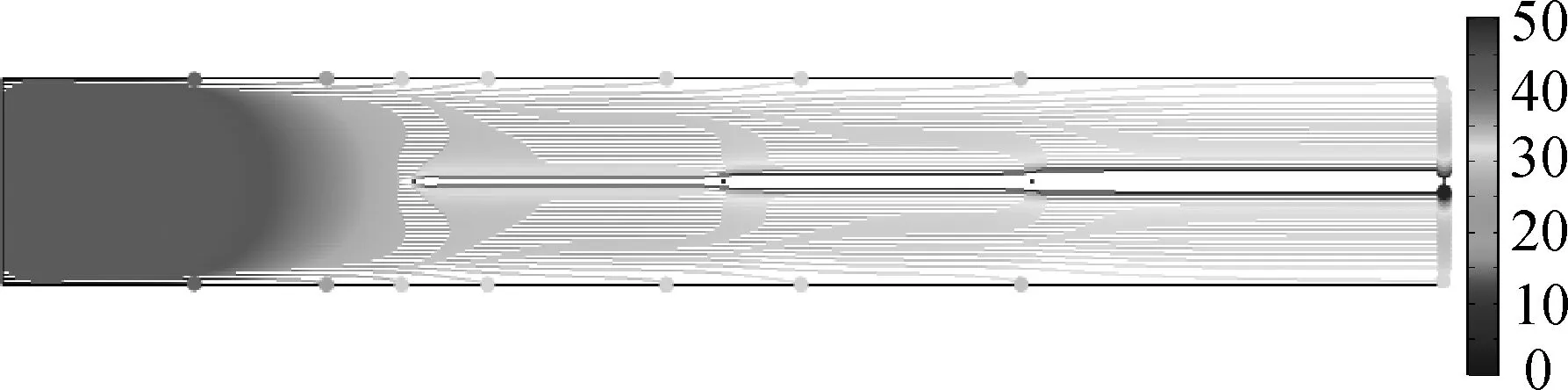
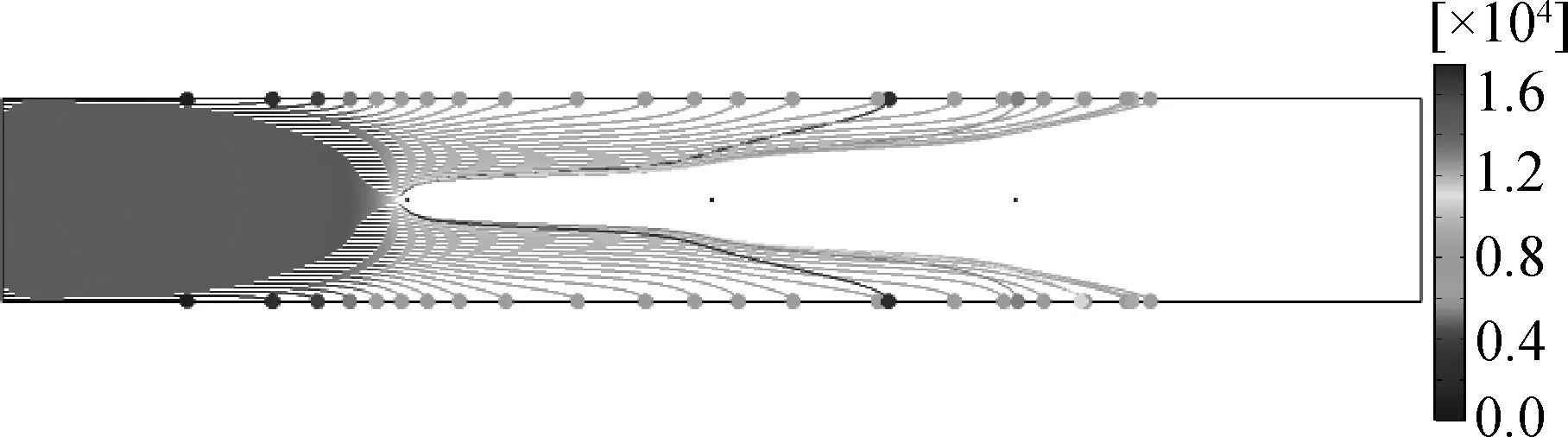
圖8和圖9展示了在V=30 kV下,二維靜電除塵器XOY面的電場分析特點。(1)電勢和電荷密度均以電暈線的連線為對稱軸呈對稱分布。(2)在相鄰電暈線連線的中點處,電勢和電荷密度出現極小值。(3)電勢和電荷密度以電暈線為中心呈環狀分布;遠離電暈線時,電勢和電荷密度逐漸變為橢圓分布。這是因為在遠離電暈線的過程中,鄰近電暈線對電勢和電荷密度影響越來越明顯。(4)可視化闡明了,根據式(4),靜電除塵器內部的電場由施加在放電極上的電壓V以及空間電荷ρq共同作用形成。
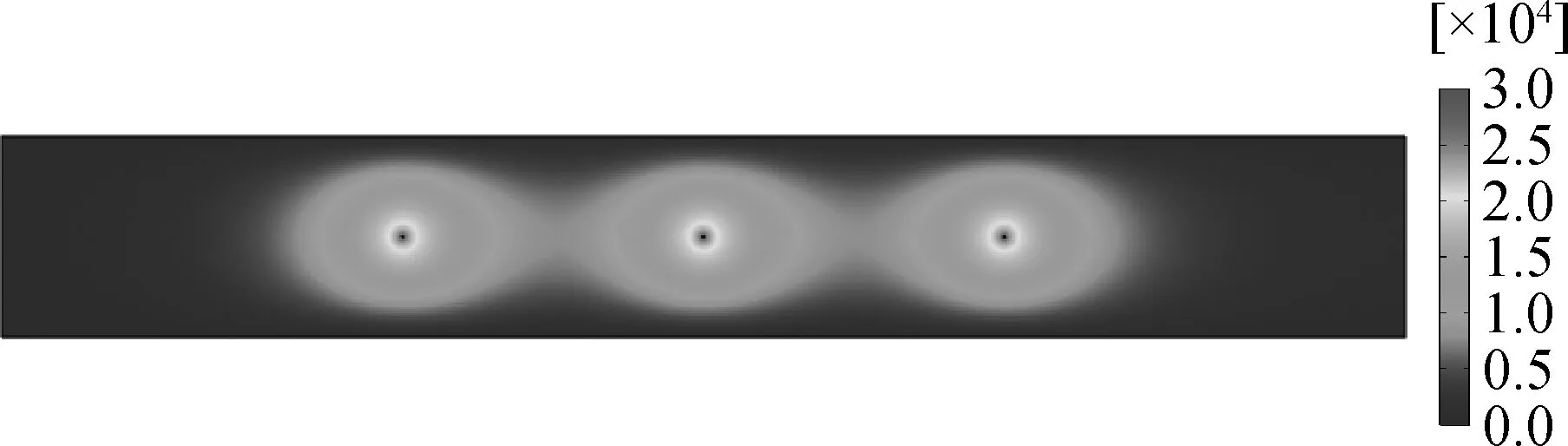
圖8 二維線-板式靜電除塵器XOY面的電勢分布
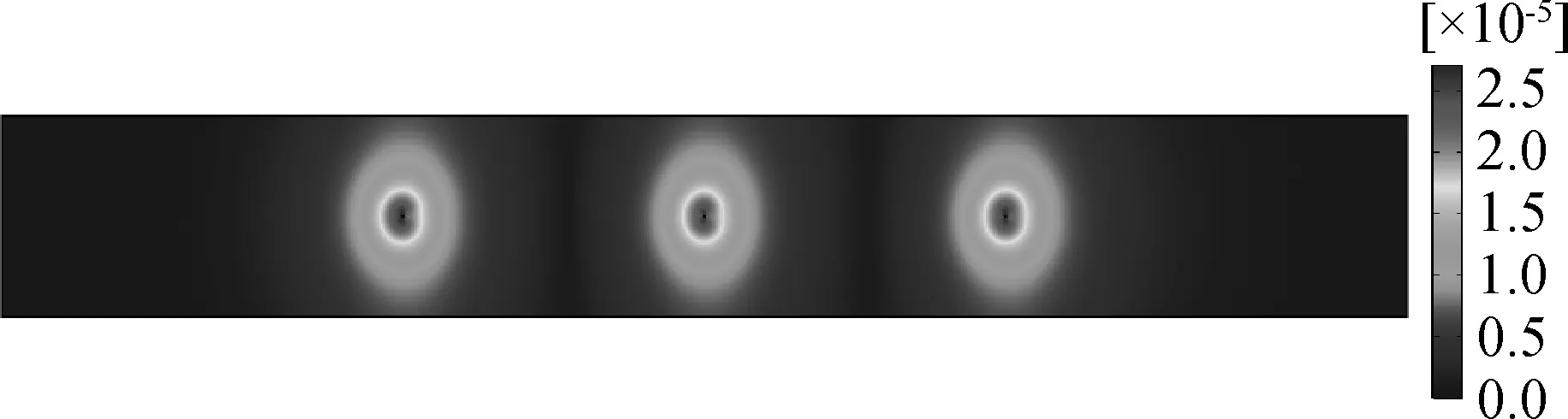
圖9 二維線-板式靜電除塵器XOY面的電荷密度分布
3.2 不同直徑顆粒的運動軌跡和捕集效率
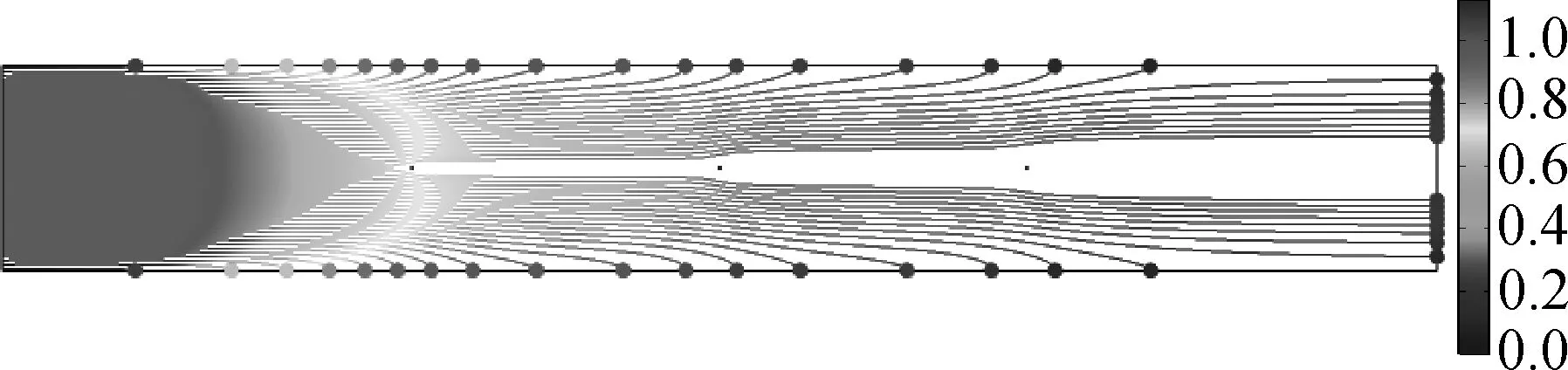
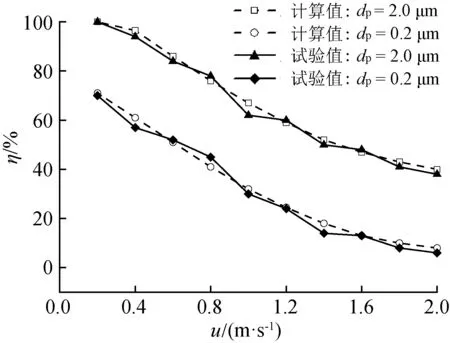
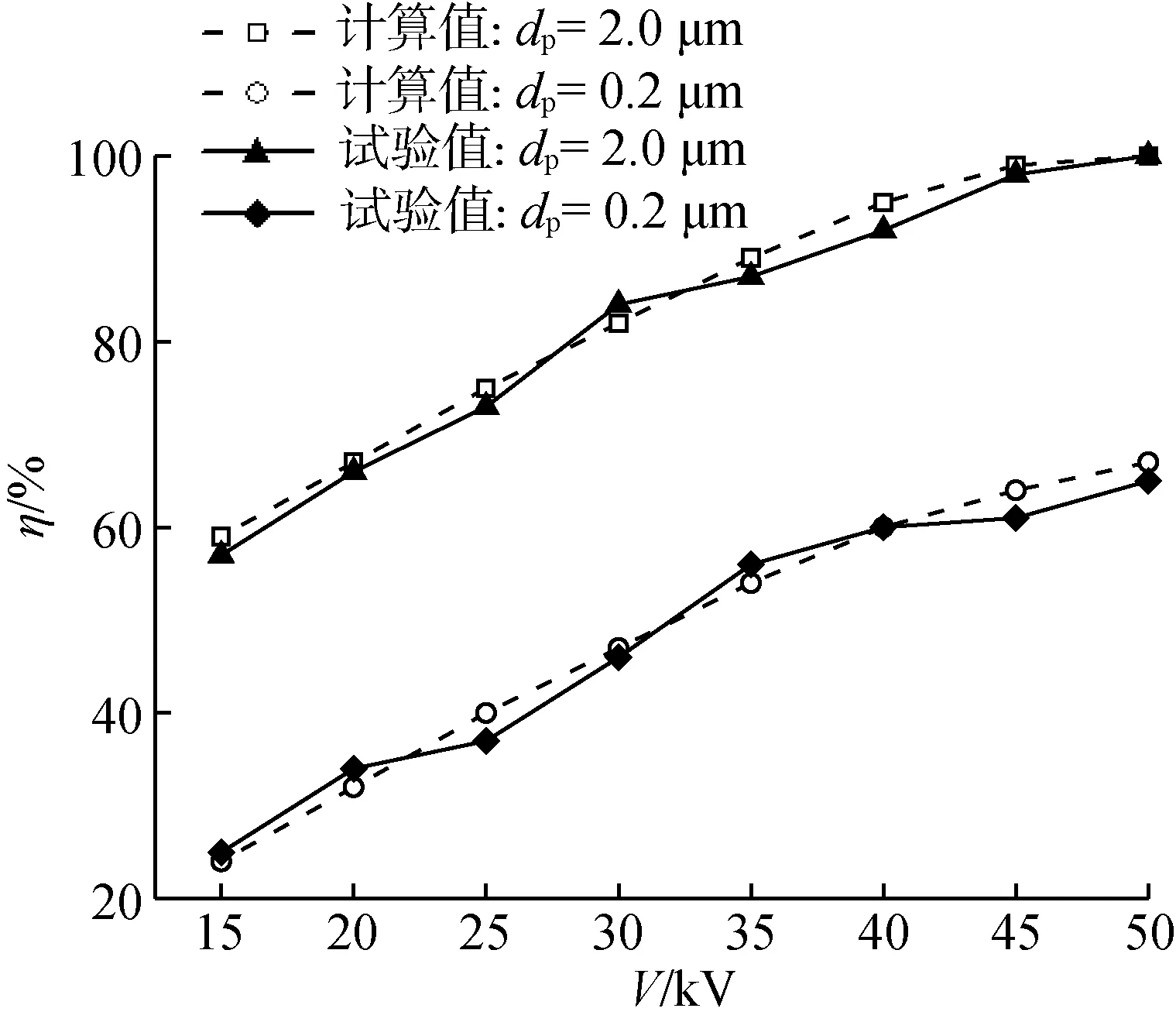
圖10展示了當u=1 m/s、V=20 kV時,顆粒收集效率與顆粒直徑的關系。從捕塵效率角度具體分析,(1)當0.01 μm 圖11顯示了4個不同直徑顆粒的顆粒軌跡和顆粒中累積的電荷。顆粒在左側釋放,并在流體流動中向右側出口傳輸。顆粒沿著其軌跡逐漸變為帶電狀態,產生的電力使其軌跡在壁方向上發生偏轉。顆粒半徑影響顆粒受到的曳力和電力的平衡,從而影響顆粒軌跡和靜電除塵器的收集效率。綜上可知,在顆粒尺寸大小兩種極端情況下,收集效率更高,即dp大于5 μm 和dp小于0.05 μm時η均超過了50%。這兩個極端表現是因為,顆粒越大會獲得越大的電荷,顆粒越小則受到的曳力越小。在這兩個極端之間,曳力對顆粒軌跡的影響最大,同時,電場荷電導致的顆粒電遷移率增大,擴散荷電導致的顆粒電遷移率減小,二者的綜合作用在這兩個極端之間粒徑最弱,因此0.05 μm 圖10 0.01~10 μm粒徑顆粒與捕塵效率之間的關系 (a) dp=0.01 μm (b) dp=0.2 μm (c) dp=2.0 μm (d) dp=5.0 μm 圖12展示了當V=20 kV時,顆粒收集效率與流速大小的關系。本文探究了PM2.5主要粒徑(dp為0.2 μm 和2.0 μm)在0.2~2.0 m/s范圍內的捕集效率變化特征,該流速變化為典型豬舍舍內空氣流速變化范圍。由圖可知,當流速減小時,顆粒捕集效率η有明顯上升,均成線性變化。2 μm徑粒顆粒捕集效率從40%上升到100%;0.2 μm徑粒顆粒捕集效率從8%上升到71%。該變化規律說明了靜電除塵器除塵過程中空氣流速是影響顆粒污染物脫除的一個重要因素,同時,基于上述u-η曲線可有效調控舍內顆粒分布。 圖12 顆粒收集效率與流速大小的關系 圖13展示了當u=1 m/s時,顆粒收集效率與電暈線電壓的關系。由圖可知,施加在電暈線上的電壓越高,靜電除塵器對于dp=0.2 μm和2.0 μm的脫除效果就越高,V-η曲線呈現線性變化,且試驗結果與算計結果相一致。因為隨著V升高,除塵器中的電場強度也隨之增大,PM2.5顆粒所受到的電場力隨之上升,細顆粒向捕塵板的偏移效果加強,從而η增大。在較低電壓區間內V的升高對η的提高比較明顯;在較高電壓區間內V的升高對除塵率也有提高,但對于dp=2 μm在電壓達到45 kV后提高效果不明顯。 圖13 顆粒收集效率與電壓的關系 試驗結果表明,當u=1 m/s,V=50 kV時,η可達100%。因此,上述V-η曲線可有效的調控舍內顆粒分布,提高PM2.5的脫除效果。 本文以豬舍靜電除塵器為載體,針對豬舍細顆粒PM2.5脫除效率低的問題,利用電場-流場耦合的數值模擬和試驗手段重點分析了顆粒在靜電除塵器內的傳輸行為。 1) 靜電除塵器內電勢和電荷密度以電暈線為中心呈環狀分布。0.01~10 μm粒徑范圍內,捕集效率η隨粒徑dp的增大,先減小,再保持不變,再增大,直至恒定不變。 2) 0.2~2.0 m/s流速范圍內,當流速u減小時,PM2.5顆粒的η有明顯上升,u-η曲線成線性變化。15~50 kV電暈線電壓范圍內,當電暈線電壓V增大時,PM2.5顆粒的η有明顯上升,V-η曲線成線性變化。因此,利用上述數值模型所獲得的方法及規律為豬舍內細顆粒污染物的綠色高效脫除技術奠定了科學方法,增強了對豬舍細顆粒的脫除效果,解決了豬舍內PM2.5難脫除的問題。

3.3 流速對細顆粒捕集效率的影響
3.4 電暈線電壓對細顆粒捕集效率的影響
4 結論
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28甘肅教育(2020年14期)2020-09-11 07:57:42中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08商周刊(2017年9期)2017-08-22 02:57:49遼寧經濟(2017年6期)2017-07-12 09:27:16中國衛生(2016年9期)2016-11-12 13:27:54時代英語·高二(2015年1期)2015-03-16 00:08:11中國洗滌用品工業(2015年7期)2015-02-28 19:02:38電子設計工程(2015年12期)2015-02-27 12:06:10中國衛生(2014年11期)2014-11-12 13:11:32
