基于人工智能的混凝土橋梁裂縫識別方法及應用
2022-09-20 07:58:20魏堅強曹仲龍
科技創新與應用 2022年26期
曹 峰,魏堅強,曹仲龍
(中交公路養護工程技術有限公司,北京 100037)
改革開放以來,中國橋梁工程緊跟時代步伐與國家經濟發展需求,取得長足發展,橋梁建設規模不斷擴大,預計到2025年中國公路橋梁總數將突破100萬[1],其中以混凝土結構橋梁數量最為龐大。由于國家經濟飛速發展和對超高交通運輸能力、運輸效率的需求,惡化了橋梁服役條件,導致這些橋梁實際使用年限大大降低[2],大多已經開始進入“老齡化”階段,病害問題越來越突出,安全事故日益增多,嚴重影響橋梁的實際營運狀態與正常使用[3-4],而裂縫屬于混凝土結構橋梁相對嚴重的病害,表現為混凝土表面多分支、長延展的細小開裂,是混凝土結構物承載能力、耐久性及防水性降低的主要原因[5],據有關調查,混凝土橋梁結構壞損的事故中九成都是因為裂縫沒有及時發現導致[6],因此定期對橋梁裂縫進行檢測在橋梁運營階段十分必要,有助于及時發現混凝土結構損傷有效降低安全事故的發生率。傳統混凝土橋梁裂縫檢測是利用橋檢車或人工搭架將檢測人員送至橋梁對應位置使用裂縫觀測儀器進行近距離觀測估值[7-8],如圖1所示,但是混凝土橋梁形狀多樣,橋型及其周邊地形環境復雜,檢測危險性大,費時費力,且結果會受檢測人員的主觀性影響,所以僅靠傳統方法很難對各種混凝土橋梁進行全面檢測[9]。隨著無人航拍技術在各行業的發展,敏銳的工程師也將無人機引入到橋梁檢測領域,通過在無人機上安裝高清攝像頭、定位導航系統、測距儀等檢測設備,利用無人機機動靈活的特點,可以解決傳統檢測方法的局限性對橋梁進行全面高效的監測[10-12],并已應用于實際橋梁檢測項目中。然而,目前無人機檢測多是操縱無人機抵近橋梁進行高清圖像采集生成結構全景圖,橋梁的裂縫缺陷仍然需要后期人工進行測量統計,冗多的檢測影像數據極易造成視覺疲勞,檢測結果的主觀性誤差仍舊沒有得到有效解決[13],如圖2所示。面對以上問題,基于計算機圖像處理技術的發展成果,將機器視覺的自動檢測系統應用于無人機圖像處理,并應用于混凝土結構橋梁的實際裂縫檢測以驗證其效果。

圖1 傳統人工檢測方法

圖2 傳統無人機橋梁檢測
1 無人機硬件平臺設置
根據無人機橋梁檢測特點和要求,自主配置了無人機硬件平臺,見表1。無人機選擇經緯MATRICE 600-Pro高載無人機,如圖3所示。內置于A3-Pro飛控系統的D-RTKGNSS模塊可以提供北斗+GPS或者GPS+GLO-NASS等組合定位,確保無人機在強磁干擾環境飛行動態定位精度和信號安全。云臺選擇了DJI禪思Z15-GH4云臺,其角度抖動量可以限制在±0.01°范圍內,確保無人機在8 m/s以下風速條件下也能拍攝出滿足要求的高質量圖像。相機選擇有效像素2 430萬的索尼Alpha 7R III微單相機。電池選擇容量為18 000 mA的格氏6S鋰電池,續航最大時長可達15 min。

表1 無人機檢測硬件平臺

圖3 經緯MATRICE 600-Pro無人機
2 無人機三維建模
2.1 航拍方案制定
航飛拍攝方案需要根據具體的橋梁檢測任務和橋梁類型來確定。對于橋面系檢測,在滿足航拍圖像航向重疊度和旁向重疊度在75%以上條件下,分別拍攝目標范圍內的前、后、左、右及下視高清圖像,并同步記錄對應的定位數據,如果不滿足要求,或重點檢測部位的圖像質量不足時,可針對該區域單獨進行補拍;對于像索橋、拱橋等特殊橋梁構件局部檢測,可針對性圍繞檢測部位環繞飛行,獲取多視角圖像及定位數據,照片須確保無死角,鄰接圖像重疊度在80%以上,拍攝方位夾角在30°內;對于下部結構病害進行局部重點檢測時,由于信號較弱,檢測安全風險較大,此時可以通過旋轉云臺拍攝橋下結構的多視角圖像,但是這種拍攝手段得到的照片傾角較大,三維建模往往要針對橋梁兩側分別進行,圖像要求與特殊構件檢測類似。確定好航拍方案之后,便可依靠無人機的定位導航實現飛行路徑智能規劃。無人機飛行路徑如圖4所示。
圖4 無人機航拍方案示意圖
2.2 圖像處理與三維立體重建
橋梁周邊環境復雜,尤其是在橋下采集圖像時,各角度圖像亮度、色調及對比度差異性較大,為了得到高質量圖像便于后續建模精確度,需要通過累積分布函數計算圖像前后強度映射關系進行圖像預處理來解決以上問題。
無人機采集的橋梁病害檢測影像數據數量巨大,且重疊度較高,如果人工篩選,不僅效率低,還極易由于視覺疲勞出現遺漏。針對此問題,隨著圖像識別技術的發展與高精確的圖像分割算法的不斷改進,基于機器視覺的自動檢測系統已經問世[14],裂縫圖像識別技術已經進入到智能化時代。基于圖像的裂縫檢測過程如圖5所示。
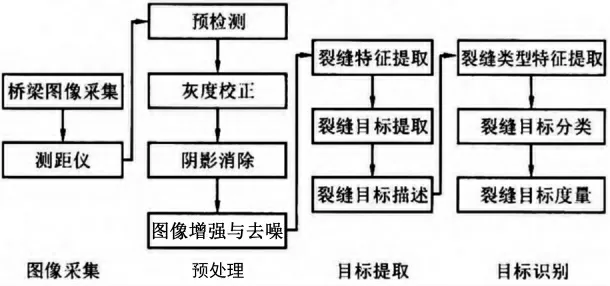
圖5 基于圖像的裂縫檢測過程
得到處理過后的高質量圖像之后,通過多視圖像聯合空中三角測量提取多視點立體影像中的同名像點生成具有真實坐標信息的密集點云,再構建Delaunay三角網就完成了三維立體重建,所有裂縫病害信息包含其內。
3 檢測應用實例
選擇某跨鋼筋混凝土梁橋,將機器視覺的自動檢測系統應用于無人機圖像處理系統,開展基于無人機三維模型的橋梁檢測試驗驗證工作。
檢測對象為跨度20 m的大箱梁,無人機通過旋轉云臺與位置調整相結合的方式對梁體腹板進行多角度拍攝,獲取了60張多視角高重疊度照片,梁體三維模型如圖6所示。基于機器視覺的自動檢測系統通過對裂縫圖像進行特征提取得到檢測結果,如圖7所示,檢測結果與實際情況對比如圖8所示,在三維模型上得到裂縫長度為321 mm,寬度為0.12 mm,與人工現場實測結果(長334 mm,寬0.16 mm)基本一致,說明三維模型可以滿足對梁體裂縫檢測的需求。

圖6 梁體三維模型

圖7 三維模型上量測距離
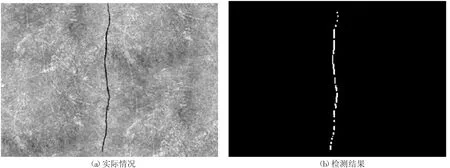
圖8 圖像處理識別后的裂縫檢測結果
4 結束語
基于計算機圖像處理技術的發展成果,將機器視覺的自動檢測系統應用于無人機圖像處理,提出了一種基于無人機三維建模技術的橋梁裂縫智能檢測方法。首先,針對無人機橋梁檢測工作的特點自主配置了無人機硬件平臺,然后,根據不同橋梁類型及檢測任務簡述了航飛拍攝方案,最后,闡述了無人機圖像處理和裂縫檢測的流程。使用該檢測方法對試驗橋梁開展檢測驗證,效果良好。
猜你喜歡
現代裝飾(2022年5期)2022-10-13 08:48:04
建材發展導向(2022年10期)2022-07-28 03:04:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
水利規劃與設計(2020年1期)2020-05-25 08:01:30
小哥白尼(趣味科學)(2019年3期)2019-06-17 11:57:44
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
山東工業技術(2016年15期)2016-12-01 05:31:04
