免像控無人機大比例尺測圖技術要求及應用研究
2022-09-20 07:58:16朱立波黃文騫季宏超李澤宇
科技創新與應用 2022年26期
朱立波,黃文騫,季宏超,李澤宇,薛 斌
(1.海軍大連艦艇學院,遼寧 大連 116000;2.91937部隊,浙江 寧波 315000)
如今無人機航空遙感技術迅猛發展,在利用無人機進行航測成圖及三維建模方面,已經在工程勘測、城市建設和水利測量等各個領域發揮著越來越重要的作用[1]。常規航測作業受制于像控點,這對于外業測量和內業處理都是一件費時費力的事。無人機免像控測量技術的出現有效克服了這一不足,特別針對部分高山、密林、灘涂和沿岸等人員無法進行像控測量的困難地區,則更能突出免像控航測系統的優越性,也使得它在大比例尺測圖中越發受到重視[2]。作為一種前景巨大的新技術,需要對其技術要求展開研究并分析其成圖精度。
文中首先闡述了無人機測制大比例尺地形圖的常規作業過程,然后又著重介紹了免像控無人機測制大比例尺地形圖的技術要求,并以大連市區實測的1∶500大比例尺地形圖為例,使用飛馬D2000無人機,由此進行航空攝影測量成圖并進行了精度分析,最后對常規RTK、網絡RTK技術、動態后處理(Post Processed Kinematic,PPK)技術及免控測圖的優勢展開了討論,為大比例尺測圖實際工作提供參考。
1 無人機測制大比例尺地形圖的常規作業流程
1.1 比例尺
航攝像片上的一條線段與地面上對應線段水平距離的比值稱為航攝比例尺,成圖比例尺則表示了地圖上一條線段的長度與地面上對應線段的實際長度之比。人們常說的大比例尺測圖,一般指的是1∶500~1∶5 000之間比例尺地形圖的測制,兩者之間的關系見表1[3]。
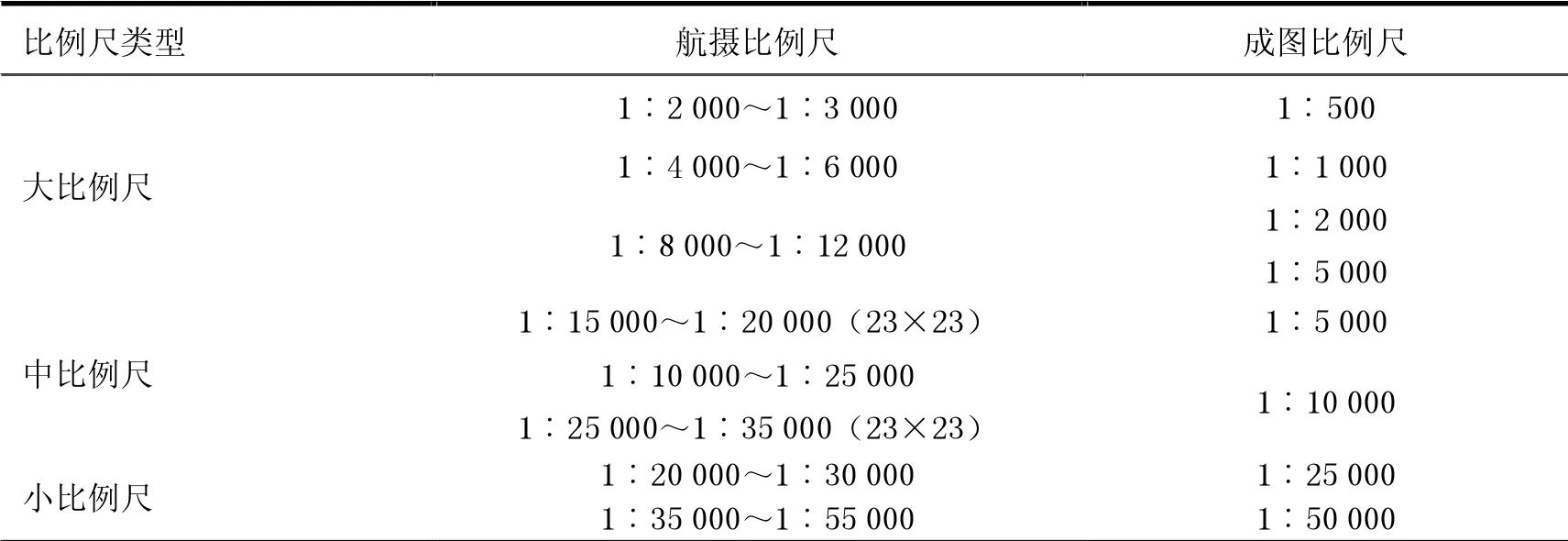
表1 攝影比例尺與成圖比例尺的關系
在開展航空攝影作業前,需要先確定相機和攝影比例尺,再按照計算的航高來設計飛行,以得到滿足實際需求的航攝產品。
1.2 常規作業流程
無人機測制大比例尺地形圖的常規作業流程主要包括收集資料、技術設計、航飛方案設計、像控布設與測量,以及航攝實施與內業處理等環節,如圖1所示[4]。

圖1 無人機進行大比例尺測圖的常規作業流程
在常規無人機開展航測作業時,其定位精度較低,一般只可以達到米級,必須通過在地面上布設像控點來加以修正,以得到更精確的位置信息。所以,相當數量的像控點是航攝像片信息處理中的數學基礎,它是航攝數據資料和大地成果連接在一起的紐帶,從而使得航攝測量具備和地面測量一致的數學關系[3]。通過空三解算,解決影像的定向及地面點的加密問題,最終獲取加密點的位置坐標。
由此可以看出,無人機測制大比例尺地形圖的常規作業對于像控點有著較大的依賴,無論是外業像控測量還是內業刺點,都將耗費一定的時間和精力,同時,控制點布設方案的選擇、布設點的穩定程度及內業刺點的精度也都會對測量結果的精度造成直接的影響。相較于常規作業,免像控作業受天氣影響以及地形條件限制較弱,降低了對外業像控點布設的依賴,縮短航測生產工期,減少外業工作量,大幅提高工作效率。
2 免像控無人機測制大比例尺地形圖的技術要求
2.1 厘米級導航定位系統
免像控無人機需要安裝RTK模塊,即運用RTK技術。其工作原理是:安裝在基準站及移動站上的接收機不斷同步接收衛星信號,基準站利用觀測數據與已知的位置信息進行分析解算得到GPS差分改正值,移動站通過這個改正值以修正自身數據,從而獲得經差分修正之后厘米級的定位結果,達到提高移動站定位精度的目的[5-6]。
按照基準站和移動站通訊方式的不同,RTK技術可以分為常規RTK和網絡RTK。在常規RTK中,流動站獲取的修正值數據信息來源于基準站的電臺;而在網絡RTK中,流動站的修正數據信息來源于專用的GPRS(General packet radio service)網絡,這個專用網由基準站網、數據中心和數據通信線路構成,常規RTK與網絡RTK兩者具體原理分別如圖2(a)、圖2(b)所示。
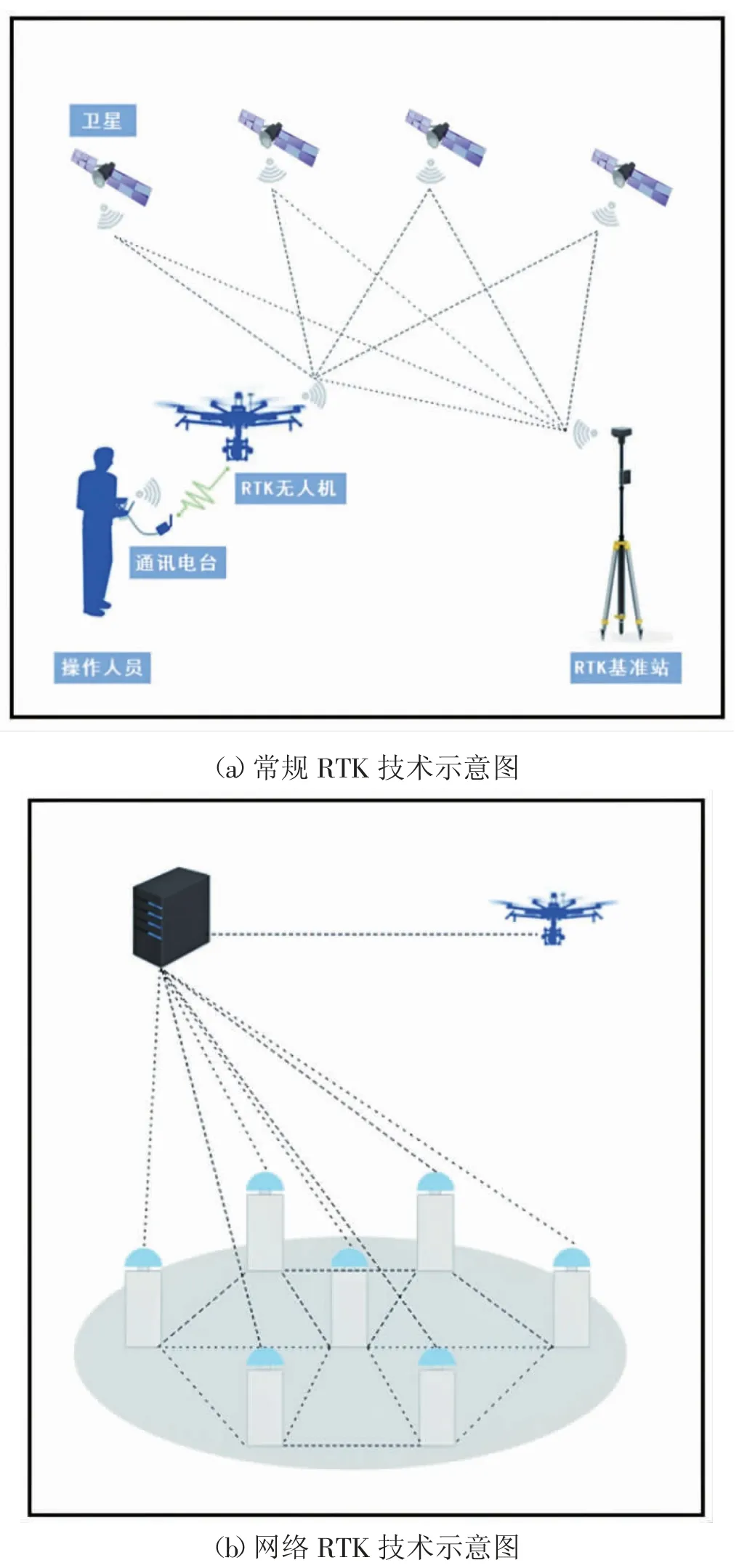
圖2 常規RTK和網絡RTK技術示意圖
在RTK技術的基礎上,可以再結合PPK技術,PPK數據事后處理的方式可以解決一部分因曝光延時和衛星信號丟失出現偏差的問題,通過融合解算有效提高定位精度。
PPK技術的工作原理是:基準站和移動站上的接收機同步接收衛星信號,事后通過計算機的處理軟件將觀測數據進行線性組合,生成虛擬的載波相位觀測量,由此確定接收機之間的相對位置關系,再結合基準站的已知位置信息,便可通過解算獲取移動站的坐標信息,具體原理如圖3所示[7]。
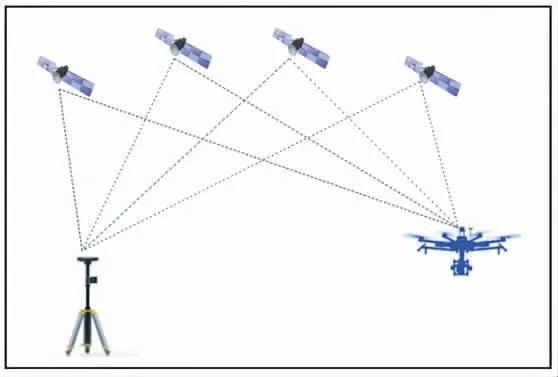
圖3 無人機PPK技術示意圖
綜上所述,搭載RTK模塊后的無人機,利用常規RTK或者網絡RTK的方式,就可以獲取厘米級的定位精度,基本可以滿足免像控大比例尺地形圖航測作業的要求。如果可以結合PPK技術,則可以進一步提高測圖精度,從而保障無人機無需像控點便可實現測制各種地區大比例尺地形圖的要求。
2.2 高精度姿態數據及三軸云臺
無人機高精度的姿態信息主要通過在定位定姿系統(Position and Orientation System,POS)中的INS(Inertial Navigation System),即慣性導航系統。慣性導航系統的3個加速度計可以敏感地捕捉目標物體在3個方向的加速度信號。另外,3個單軸的陀螺儀則可以檢測出目標物體的角速度信息。再通過數學積分運算就可計算得到目標物體的速度和位置信息[8]。
無人機的實時速度可以通過三軸的加速度大小和時間得到

已知無人機的初始位置,無人機的實時位置就可以通過對三軸的速度分量進行積分可以得到

式(1)—式(2)中:v為速度;a為加速度;r為目標載體的位置;t0為初始時刻;tk為某一瞬時時刻。
慣性導航系統除了慣性測量單元(Inertial Measurement Unit,IMU)外,計算裝置、控制顯示器等部件也是必不可少的,具體工作原理如圖4所示[8]。

圖4 IMU原理圖
除了高精度的姿態數據之外,還需要精密的云臺,以保證無人機可以平穩地搭載各種載荷。無人機一般要求具有高精度的三軸云臺,從而可隔離對無人機姿態的干擾、框架之間的相互耦合,從而減少機械振動、點擊的反電動勢的誤差影響,從而保證了無人機機載相機視軸的穩定性,并確保拍攝出高精度、無失真的中低空遙感影像。
2.3 精準數據采集系統
無人機免像控應用離不開精準的數據采集系統,系統的時間同步功能將飛控、載荷和RTK時間同步在一起,以保證相機成像時刻的超低時間誤差。另外,對相機鏡頭點和天線系統的中心點位置進行修正,減少位置信息和相機的時間誤差,從而獲取更加精確的影像位置信息[9]。
2.4 準確的相機內方位元素
無人機搭載的相機載荷一般都是非量測相機,這種相機鏡頭畸變較大,內方位元素未知。為了提高其數據產品的精度,需要在航空攝影測量之前對無人機相機參數進行標定[9]。
直接線性變換法是建立像點坐標和相應物點物方空間坐標之間直接的線性關系的算法,其嚴格的共線方程為
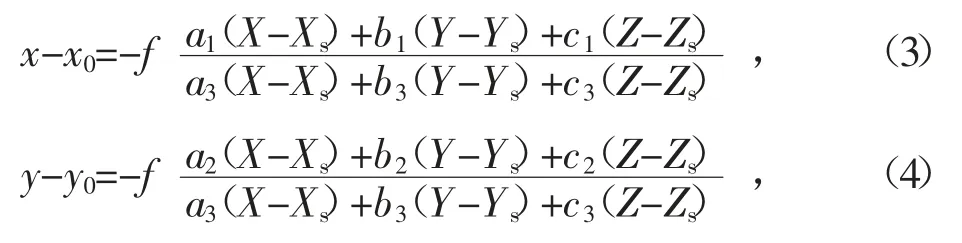
式(3)—式(4)中:(x0,y0)表示像主點坐標;(x,y)表示像點坐標;(X,Y,Z)表示的是物方空間坐標系下像點所對應的地面點坐標;(Xs,Ys,Zs)表示的是攝站點在物方空間的三維坐標;f表示相機的主距;ai,bi,ci(i=1,2,3)是其所關聯坐標軸的系數。若采用直接線性變化對其進行計算,所得到的直接線性變換公式為

式(5)中:Li(i=1,2,3,…,11)是直接線性變換方法的待定參數,表示了物空間坐標系和圖像空間坐標系之間的關系。考慮到無人機搭載的非量測相機物鏡畸變較大,需要附加畸變改正,由此列出以下公式:
考慮鏡頭的仿射變形和徑向、偏心畸變,畸變改正參數△x、△y可以表示為

式中:m1、m2為仿射和剪切畸交換系數;r為像點徑向半徑;ki(i=1,2,3)為徑向畸變系數;p1、p2為徑向畸變系數。由此可以解算出Li(i=1,2,3,…,11)和k1、k2、k3、p1、p2、m1、m2,然后再進一步計算,可以得到相機的內方位元素x0、y0。
3 低空攝影實驗及精度分析
本文的試驗研究區域位于遼寧省大連市,測區面積約1.5 km2,試驗采用飛馬D2000多旋翼無人機系統,該系統裝載了RTK模塊,支持網絡RTK/PPK融合差分作業模式,配套飛馬無人機管家可以進行高精度RTK/PPK融合解算,全面提升了定位精度及數據質量的可靠性。機上配備了D-OP3000傾斜五鏡頭相機,通過相機與平臺之間的硬件協同與控制算法,保證了DOP3000每攝站具有突出的時間同步與姿態控制能力。另外,飛馬配套建設的相機實驗室檢校場提供了相機高精度的相機內方位元素,能夠滿足載荷的畸變改正達到亞像元級別。以上技術要求為飛馬無人機的免像控應用打下了基礎。
在任務過程中,航高設置為120 m、航向重疊率設置為80%、旁向重疊率設置為70%,綜合考慮測量區域的面積、形狀和地形地貌形態等特點,均勻布設了25個檢查點,用于對成果質量的控制,具體檢查點分布情況如圖5所示。

圖5 檢查點分布情況圖
試驗研究中數據處理所使用的是LENOVO 30DJS8HX00計算機,其采用了Windows1 064位操作系統,搭載了i9-10900處理器,運行內存為128 GB,機身內存為10 T,可以為海量航攝影像提供充沛的存儲空間并較為高效地完成數據處理工作。試驗中將基站GPS數據與飛機GPS數據通過飛馬無人機管家進行后處理差分解算,無像控點參與計算,運用飛馬無人機管家生產的測區一部分DSM、DOM及25個檢查點精度檢核情況分別如表2和圖6所示。
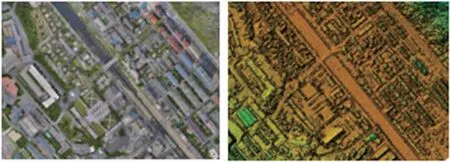
圖6 試驗區部分區域數字正射影像(DOM)和數字表面模型(DSM)
從表2中可以看出,平面坐標X、Y方向的偏差均在0.15的限差范圍內,高程Z方向的限差也在基本等高距的1/3(0.15 m)限差范圍內。根據GB/T 7930—2008《1∶500 1∶1 000 1∶2 000地形圖航空攝影測量內業規范》,平面及高程精度均滿足1∶500地形圖測制要求,因此利用飛馬D2000無人機采用免像控技術測制1∶500大比例尺地形圖是完全可行的,可以高效地滿足實際生產需求。

表2 試驗區檢查點精度檢核
4 討論
4.1 常規RTK與網絡RTK的比較
常規RTK與網絡RTK的對比可以從工作效率、作業精度和作業距離這幾個方面展開。在工作效率上,常規RTK作業流程相對比較麻煩,主要包括收集已知控制點、現場踏勘、已知點上架設基準站和配置基準站等多個環節,而網絡RTK只需要設置好連接基準網絡的參數就可以開展移動站的作業;在作業精度上,常規RTK的誤差處理方式是先采用鐘差模型修正,再利用同步觀測值差分來減小誤差。當基準站和移動站之間的距離控制在一定范圍內,GPS誤差的空間相關性大致是隨距離線性變化的,如果超出一定范圍,則會導致數據出現較大的觀測誤差。網絡RTK主要是通過同步觀測值求差的方式來減小誤差。相對距離較近的虛擬基準站為移動站提供了所需的數據,這種方式可以有效減小軌道誤差。另外,服務器也可以充分調動整個網絡的資源,用于更加精確地解算模糊度,明顯加快了初始化速度;在作業距離上,常規RTK作業常常受到數據鏈電臺傳輸距離和定位精度的制約,使得作業距離往往十分有限,一般最遠作業距離在15 km左右。而網絡RTK克服了定位精度與距離相關的缺點,只要有網絡覆蓋,就可以直接使用網絡高精度的差分信息,作業范圍得到擴大[10]。
4.2 RTK技術和PPK技術的比較
RTK技術和PPK技術兩者操作模式相同,都需要使用基準站及移動站的模式,而且都可以獲取厘米級的定位精度。但二者的通信手段有所不同,使用RTK時,必須使用無線電臺或網絡來傳送差分數據,而在利用PPK技術開展測量作業時,則無須攜帶通信裝置。二者在定位方式上也存在差異,使用RTK時,能夠實時掌握測點的位置信息和精度信息,而使用PPK必須先進行測量后處理才能夠看到測量結果。另外,在作業范圍上,常規RTK受制于基準站和作業精度,網絡RTK受制于網絡信號的覆蓋范圍,理論上一般RTK最遠的工作距離在15 km內,但PPK一般操作半徑可以達到50 km,同時定位精度也比RTK要高些。因此,PPK技術相較于RTK技術還是有一定優勢的,擁有著廣闊的應用前景[11]。
4.3 免控制點測圖的優勢分析
免控制點測圖免去了布設外業控制點這一步驟,這使得外業工作量大大減少,可以縮短航測生產工期,提高了工作效率。在內業數據處理時,需要人工刺控制點,這些對于人員的專業素質要求相對較高,難免會引入人為誤差,空三解算時造成誤差累積,導致成果質量的降低,免控制點則能有效避免刺點誤差。除此之外,對于一些通視較差,或者不易于布設控制點的危險區域,免控制點測圖的方式發揮的作用更加明顯,它使得航測作業更加高效、安全和可靠。
5 結束語
隨著對無人機技術研究的不斷深入,在精度滿足需求的情況下進行產業化應用推廣,將逐步擺脫航空遙感對地定位長期受制于地面控制的情況,大幅度提高工作生產效率,同時解決高山、荒漠、沼澤、茂密森林、海島礁等復雜和危險地區快速獲取地理信息的難題,使得無人機免像控技術得以充分發揮高效、快速、靈活及機動的特點,廣泛應用于國民經濟建設的各個領域。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
兒童故事畫報(2013年3期)2013-06-24 05:40:30
