無信號控制路段人行橫道人車沖突風險分析
2022-09-19 08:09:08王曌亞周荷媛
交通運輸工程與信息學報 2022年3期
袁 黎,王曌亞,周荷媛
(1.河海大學,土木與交通學院,南京 210098;2.河海大學,計算機與信息學院,南京 210098)
0 引 言
無信號控制路段是未設置機動車和行人信號燈的路段。它是道路交通網(wǎng)的重要組成部分,其人行橫道處因行人過街存在大量行人和機動車交織,是人車沖突的高發(fā)點。相較于信號控制路段,此處缺乏信號燈的保護和引導,行人和駕駛員存在著爭奪路權的現(xiàn)象,極大地威脅著行人和駕駛員的人身安全。另外,與交叉口處的人行橫道相比,機動車在路段人行橫道處行駛速度較高,駕駛員警惕性不強。因此,衡量無信號控制路段人行橫道處的安全水平并提出合理的人車沖突風險評估方法,對提升此位置行人通行安全水平極其重要。
近年來,國內(nèi)外研究者對人車沖突進行了相關研究并取得了一定的成果,這些成果多為路段人車沖突概率、嚴重程度差別和評價。對于人車沖突概率,王俊驊等[1]基于交通沖突技術理論,通過攝影法獲得車流量、路段平均車速和行人流量變量指標,證明了人車沖突服從負二項分布并建立人車沖突概率模型;陸斯文等[2]利用概率論方法,研究行人與機動車之間的交通沖突和碰撞微觀機理,分別推導出人車沖突和碰撞概率微觀模型。對于人車沖突嚴重程度。Hyden[3]通過沖突速度(CS)和沖突時間(TTC)來確定交通沖突嚴重度水平;李杰等[4]以TTC 為指標,將模糊推理思想引入交通沖突嚴重度判別,有利于實現(xiàn)自動沖突檢測;牟瑞芳等[5]在Hyden 提出的指標基礎之上,建立評價指標屬性離散標準,構(gòu)建人車沖突嚴重度矩陣,通過云模型理論實現(xiàn)評價指標定量計算與人車沖突嚴重度定性模糊概念的互相轉(zhuǎn)換;除了CS 和TTC 兩個指標之外,Almodfer 等[6]通過視頻采集分析,研究了無信號控制路段各車道上的人車沖突分布情況,并以后侵入時間(PET)作為評估人車沖突的指標,提出一種基于車道的后侵入時間評估方法;Zhang 等[7]利用基于車道的后侵入時間(LPET)對多車道中段人行橫道人車沖突進行分析。然而沖突嚴重性可能會伴隨行人或駕駛員行為的變化而變化,上述指標作為嚴重性評估維度對此考慮不足,蔣沛[8]則采用行人安全邊際時間(PSMT)作為PCS(Pedestrian-vehicle Conflict Severity)分級指標,對人車沖突分級,再根據(jù)分級后的結(jié)果構(gòu)建基于Ordered probit 的人車沖突量化模型,對樣本進行OP 回歸分析后確定對無信號控制路段人車沖突嚴重程度有顯著影響的因素;Kadali等[9]采用數(shù)據(jù)搜集的方法,評估了在印度無信號控制路段人行橫道處人、車矛盾的嚴重程度,引入行人和駕駛員行為變化兩個因素,并探討其對嚴重程度的影響;Lu 等[10]以構(gòu)建人車交互仿真模型,結(jié)合TTC的定義對行人安全進行評估。
上述研究大多只考慮時間和速度這兩個沖突嚴重度指標,并且路段的安全評價結(jié)果都主要基于對單個機動車與個體行人之間沖突嚴重度的衡量,考慮沖突可能性和碰撞后果較少,不能很好地評價路段整體的人車沖突風險。而現(xiàn)有的沖突風險評估多集中在交叉口交通沖突上,袁黎等[11]提出“車流沖突線”概念,通過概率、嚴重度、沖突向后傳遞長度構(gòu)建無信號交叉口安全風險評估;朱勝雪等[12]利用沖突指數(shù)、幾何設計影響系數(shù)、安全設施影響系數(shù)建立交叉口安全評價指標;王春勤等[13]以交通沖突數(shù)與混合當量交通量的比值(TC/MPCU)作為指標對沖突進行分級評價;袁黎等[14]以期望值的觀點構(gòu)建交叉口車流當量沖突量,用以評估交叉口潛在風險性的高低。針對無信號路段的人車沖突風險評估較少。
除了嚴重度指標,對無信號控制路段人車沖突風險的考量也應該包括曝光程度和發(fā)生的概率[15]。此外,已有的沖突時間、后侵入時間等指標數(shù)據(jù)在實際中獲取難度較高。故本文從車流-行人流出發(fā),利用道路條件、交通流特征、數(shù)學概率與期望、物理碰撞原理、行人碰撞損傷等知識,探討分析人車沖突概率、肇事后嚴重性以及期望人車沖突量,并給出具體量化方法。基于此,構(gòu)建無信號控制路段人行橫道處人車沖突風險評估模型,可在不需觀測和統(tǒng)計沖突情況下,對無信號路段的安全性進行評估。該模型可為交通設計、管理者服務,讓其快速得到目標無信號路段風險程度,為控制事故率、安全決策提供依據(jù)。
1 無信號控制路段人車沖突
1.1 無信號控制路段人車沖突定義
交通沖突指交通行為者在參與道路交通中,兩個或兩個以上的道路使用者在空間和時間上接近彼此到某種程度,此時如果二者的運動保持不變則會導致交通損害危險的發(fā)生。根據(jù)交通沖突定義及相關文獻,本研究將無信號控制路段人車沖突定義為行人和駕駛員在參與道路交通中,雙方感知到危險時,行人或駕駛員必須改變路線或速度或采取其他避險措施以避免碰撞的交通遭遇事件,如圖1所示。
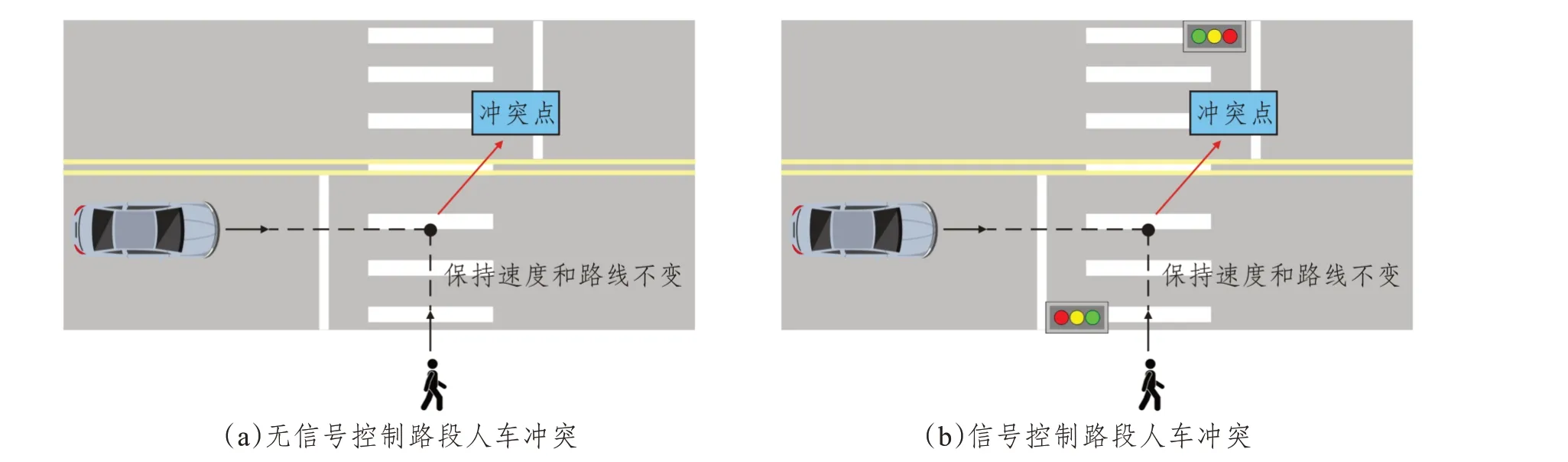
圖1 人車沖突示意圖Fig.1 Diagram of pedestrian-vehicle conflicts
1.2 無信號控制路段人車沖突特性
隨機性、可避免性和嚴重性是人車沖突的三個基本特性。行人和機動車在一段時間內(nèi)出現(xiàn)在路段的時間和位置是不確定的,故人車沖突是一件不可預測的高度隨機事件,可用數(shù)學概率和期望知識來描述人車沖突的隨機性。行人和機動車在不斷接近的過程中,行人和駕駛員出于求生本能會采取一定的避險行為來規(guī)避沖突,因此人車沖突具有一定的可避免性。
當人車沖突發(fā)生時,因沖突發(fā)生的后果接近肇事事故的程度各異而存在不同的嚴重性。根據(jù)嚴重程度不同可將人車沖突分為無沖突、一般沖突和嚴重沖突三種,其中嚴重沖突是最接近事故的沖突。
2 無信號控制路段人車沖突風險評估模型構(gòu)建
在分析無信號控制路段人車沖突特性的基礎上,本研究采用人車沖突概率、人車沖突肇事后嚴重性、人車沖突期望沖突量三個指標來構(gòu)建無信號控制路段人車沖突風險評估模型。模型如下式所示:

式中:Ai為人車沖突風險值;Pi為人車沖突概率;Ti為人車沖突嚴重程度;Di為人車沖突期望沖突量;i為與行人發(fā)生沖突的機動車類型。
無信號控制路段人車沖突風險評估流程如圖2所示。

圖2 人車沖突風險評估流程Fig.2 Establishing process of risk evaluation model
根據(jù)《城市道路工程設計規(guī)范》(CJJ37—2012),本研究將機動車分為小客車和大型車,i=1,2 分別代表小客車和大型車(“小型普通客車”和“輕型普通貨車”統(tǒng)一簡稱為“小客車”,“大型普通客車”和“重型普通貨車”統(tǒng)一簡稱為“大型車”)。考慮到在城市道路上行駛的小客車多為小轎車,大型車多為公交車或大型巴士,綜合考慮載客因素并參考《機動車運行安全技術條件》(GB7258—2017)和《汽車、掛車及汽車列車外廓尺寸、軸荷及質(zhì)量極限》(GB1589—2016),確定出小客車和大型車的相關基本參數(shù)假定值,如表1所示。
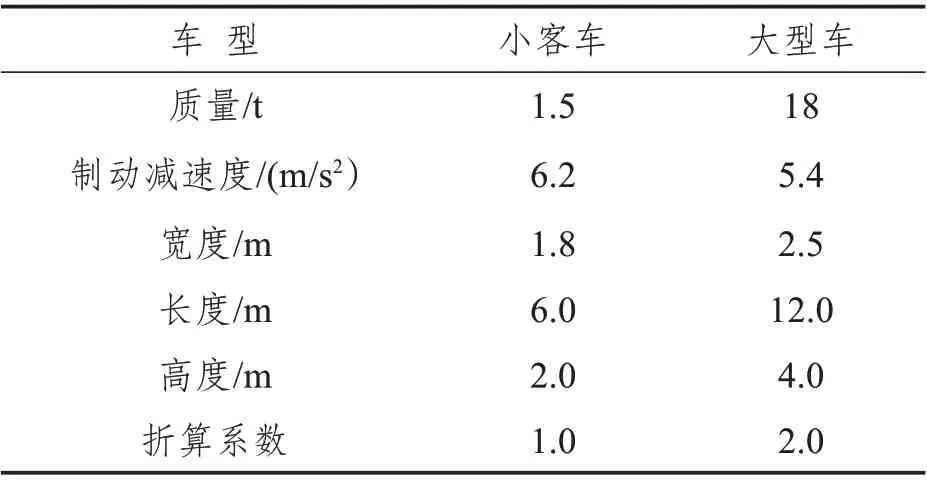
表1 不同車型的基本參數(shù)Tab.1 Essential parameters of different vehicle models
2.1 人車沖突概率模型
無信號控制路段人行橫道處發(fā)生人車沖突時,行人和機動車將同時出現(xiàn)在過街人行橫道某處,故針對無信號控制路段的單一車道,分析機動車和行人出現(xiàn)在人行橫道處的概率。
2.1.1 機動車出現(xiàn)在人行橫道處概率
研究顯示機動車到達服從泊松分布,則機動車在行人穿越機動車寬度范圍所需時間內(nèi)到達的概率可用下式表示:

式中:PVi為i種機動車到達行人行橫道的概率;QVi為i種機動車流量(pcu/h);Ei為i種機動車寬度(m);VP為行人的步行速度(m/s)。
2.1.2 行人出現(xiàn)在人行橫道處概率
行人在無信號控制路段人行橫道處過街時的過街行為包括兩個部分:一是行人到達人行橫道過街起點;二是行人選擇合適過街間隙選擇過街。因此分析行人出現(xiàn)在人行橫道處概率時需要考慮上述兩部分的概率。
(1)行人到達概率
研究顯示行人到達與機動車到達一樣服從泊松分布,則行人在機動車穿越行人位置所需時間內(nèi)到達的概率可用下式表示:

式中:PAi為行人在i種機動車穿越行人位置所需時間內(nèi)到達的概率;QP為行人流量(人/h);Fi為i種機動車長度(m);VV為機動車速度(m/s)。
(2)行人選擇過街概率
假設道路寬度為L,當行人能順利穿越道路時,車頭時距需大于所設置最小可接受安全間隙t0=L VP,即在t0時間內(nèi)沒有機動車到達,此時行人選擇過街。由于機動車到達服從泊松分布,車頭時距則服從負指數(shù)分布,行人選擇過街概率可用下式表示:式中:Pi為人車沖突概率值;H為路段道路車道數(shù)。

2.2 人車沖突肇事后嚴重性分析
在行人與車輛發(fā)生碰撞時,碰撞時的能量會造成行人、駕駛員的受傷或者死亡以及車輛的變形,碰撞時產(chǎn)生的能量即機動車與行人之間傳遞的動能的大小與事故的嚴重性呈正相關。此外,根據(jù)文獻[16]中關于人車碰撞數(shù)據(jù)研究,可總結(jié)得到影響行人損傷嚴重程度的主要因素是碰撞速度和車輛體型。其中隨著碰撞速度的增加,行人受重傷的概率增大;同時與小型車相比,行人在被大型車撞擊時受重傷的風險更大。因此本研究分車型探討人車沖突肇事后的嚴重性,依據(jù)物理動力學原理并利用機動車的質(zhì)量以及碰撞速度來量化嚴重程度。
(1)不同車型的人車沖突嚴重程度


圖3 人車碰撞示意圖Fig.3 Diagram of pedestrian-vehicle collisions
依據(jù)物理動力學以及數(shù)學概率知識可得到人車沖突的嚴重程度如下式所示:

式中:Ti為i種機動車沖突嚴重程度;λ為雙向所有車種車流量之和(pcu/s);tP為駕駛員的反應時間(s),依據(jù)《城市道路設計手冊》推薦混合車流取1.5 s;tsi為i種機動車減速至完全停止所需時間(s);ai為i種機動車的制動減速度(m/s2);VV為機動車的行駛速度(m/s);Mi為i種機動車的質(zhì)量(t)。
同時,碰撞位置的不同也會影響人車沖突肇事后的嚴重性。因碰撞過程中的動力學響應非常復雜,行人頭部損傷與胸部損傷之間具有較強的相關性[17],故本文僅以行人的頭部損傷指標HIC(Head Injury Criterion)作為判別不同碰撞位置對人車沖突肇事后嚴重性造成的影響。從計算公式看,HIC 是對行人頭部響應加速度短時間內(nèi)的積分,且指數(shù)為2.5[18]。因此,為簡化計算,可以不同碰撞位置下行人拋出速度比的2.5 次方作為標準探討不同碰撞位置所帶來的影響。
行人與機動車前部碰撞位置是隨機的,假設碰撞位置服從均勻分布[18],則碰撞位置在機動車的左側(cè)、中部、右側(cè)(各部分寬度為車寬的三分之一)的概率是一致的。在人車碰撞過程中,行人側(cè)向形態(tài)被機動車碰撞的情況占比為68 %[18],加之人行橫道上行人縱向穿越過街,故本文主要考慮行人側(cè)向形態(tài)的碰撞。
根據(jù)文獻[19]中關于行人拋距與機動車碰撞速度之間關系的研究,可分別得到行人側(cè)向形態(tài)與機動車側(cè)邊三分之一、中部碰撞時行人拋距與機動車碰撞速度的擬合關系,并結(jié)合行人拋距公式,得到行人拋出速度比,如式(10)、(11)所示:


式中:ei為行人與i種機動車在不同位置碰撞時的拋出速度比;vai為行人側(cè)向形態(tài)與i種機動車側(cè)邊三分之一碰撞時拋出速度(m/s);vbi為行人側(cè)向形態(tài)與i種機動車中部碰撞時拋出速度(m/s);hi為與i種機動車碰撞后行人平拋高度(s),行人被平拋的高度大致是機動車發(fā)動機罩高度與行人軀體半徑之和[19],本文取機動車高度的一半;φ為行人與地面的摩擦系數(shù),本文取0.48[19];V′Vi為i種機動車的碰撞速度(m/s)。
(2)權重一致化
為避免扭曲期望人車沖突量的計算,需保持兩種車型的沖突權重值的總和為2,權重值計算結(jié)果如表2所示。

表2 各車型期望人車沖突嚴重比權重值一致化Tab.2 Weight value of the expected pedestrian-vehicle conflict of each vehicle model
2.3 期望人車沖突量
由于人車沖突發(fā)生時行人的步行方向與機動車的行進方向相互垂直,且行人需要從人行橫道的一側(cè)行至另一側(cè),則行人與機動車可能會產(chǎn)生交叉沖突。假設每股行人流對應行人數(shù)為S,每股機動車流對應當量交通量為N(其中小客車為N1,大型車為N2,N=N1+N2)。當發(fā)生人車沖突時,S個行人對應于S+ 1 個行人位置中,任意一個位置都有可能和N輛機動車交叉沖突,則根據(jù)排列組合可知S個行人與N輛機動車發(fā)生沖突的可能數(shù)F以及概率Pc:


2.4 模型構(gòu)建
根據(jù)上述關于人車沖突概率、沖突嚴重性、期望沖突量的分析,構(gòu)建無信號控制路段人行橫道處人車沖突風險評估模型,即式(1)可改寫如下:

2.5 安全風險等級劃分
以人車沖突風險值A為劃分指標,將路段危險程度劃分為很安全(A 級)、較安全(B 級)、一般(C級)、較危險(D 級)、很危險(E 級)這5 個安全風險等級,安全風險等級越高,事故發(fā)生的概率越大[20]。在江蘇省南京市15個無信號控制路段進行現(xiàn)場觀測,并以問卷調(diào)查的方式問詢得到受訪人員的主觀危險度感受。梳理調(diào)查問卷結(jié)果,結(jié)合模糊理論得到人車沖突風險值與不同安全風險等級之間的隸屬函數(shù)值,利用Origin軟件對不同等級下的隸屬函數(shù)值進行擬合[21]。由于擬合輸出結(jié)果較多,故以參數(shù)少、相關性高為篩選原則對擬合結(jié)果進行篩選。篩選后的擬合結(jié)果如圖4所示。

圖4 各安全風險等級隸屬度擬合曲線Fig.4 Fitting curve of membership degree of each risk level
為了將隸屬函數(shù)描述的迷糊集合明確化,需要通過水平截集α確定新的集合。水平截集α越高,則對安全風險等級的描述越苛刻。為了更為保守且高標準地劃分安全風險等級,本文選用α=0.9 時各等級下隸屬度大于或等于α的人車沖突風險值集合作為等級區(qū)間,并以區(qū)間右邊界值與相鄰等級的左邊界值的平均值作為最終區(qū)間劃分標準值,具體各等級區(qū)間左右邊界值以及劃分情況如表3、表4所示。
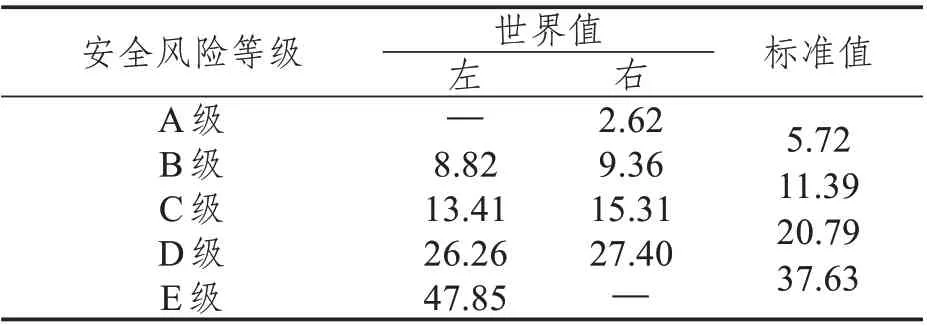
表3 無信號控制路段各安全風險等級區(qū)間邊界值(α=0.9)Tab.3 Interval boundary value of each risk level at unsignalized mid-block crosswalks(α = 0.9)

表4 無信號控制路段安全風險等級劃分Tab.4 Risk level of unsignalized mid-block crosswalks
2.6 模型有效性驗證
為了驗證無信號控制路段人車沖突風險評估模型的合理性,選擇南京市15 處無信號控制路段作為數(shù)據(jù)采集的對象,計算出模型結(jié)果。同時,組織8 名交通從業(yè)人員依據(jù)對現(xiàn)場錄像的觀察以及自己的知識和經(jīng)驗,對這15 處路段的人車沖突風險性打分(100 分制),分數(shù)越低,路段人車沖突風險性越高。利用SPSS 軟件對模型計算值與主觀打分均值進行相關性分析,如表5和圖5所示。
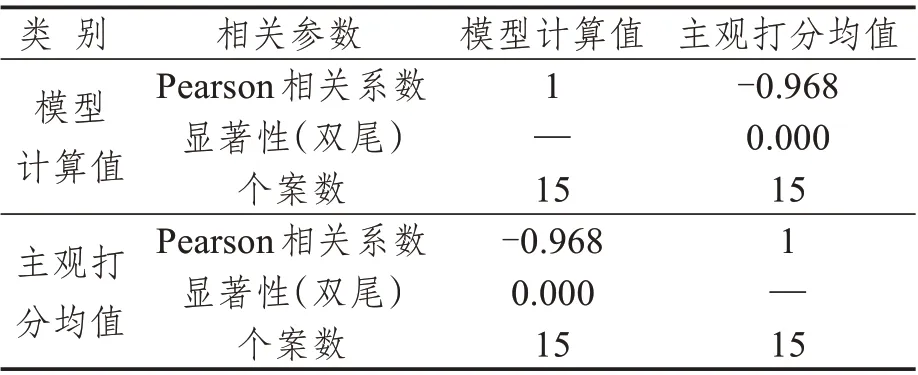
表5 模型計算值與主觀打分均值相關性分析Tab.5 Relativity analysis of the values calculated by the model and subjective average score

圖5 模型計算值與主觀打分均值相關性分析Fig.5 Relativity analysis of the values calculated by the model and subjective average score
由表5 和圖5 可知,無信號控制路段人車沖突風險評估模型計算值與主觀打分均值之間呈較強的負相關性,模型具有一定的合理性。
3 實例應用
以南京市一處無信號控制雙向4車道路段(南京古南都飯店)為例進行實證研究,此處道路限速50 km/h,寬度為12 m,人行橫道寬度為4.9 m,其地理位置如圖6(a)所示。

圖6 南京古南都飯店實地調(diào)查情況Fig.6 Survey in Nanjing Grand Hotel
3.1 數(shù)據(jù)獲取
選擇攝影法,在平峰時段(15:00 開始計時)對此處無信號控制路段進行為期1 h 的觀測。利用圖林白板和視頻播放軟件獲取并處理數(shù)據(jù)(如圖6(b)所示),得到行人流量、車流量、行人步行速度以及車輛速度等數(shù)據(jù)的觀測值,如表6所示。
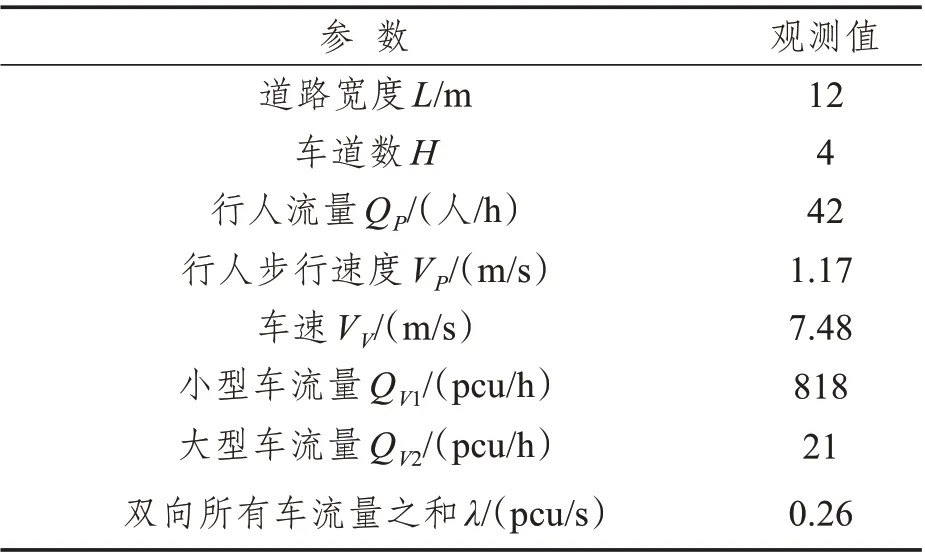
表6 模型參數(shù)標定值Tab.6 Model parameters calibration
3.2 人車沖突風險值計算
(1)人車沖突概率
根據(jù)式(6)計算不同機動車類型下的沖突時間間隔,同時接受路段人行橫道人車沖突概率等于1 減去路段人行橫道內(nèi)每條車道均不發(fā)生沖突的概率,即結(jié)合式(7)、(8)計算得到路段行人與小型車、大型車沖突概率分別為P1=0.000 536,P2=0.000 06。
(2)肇事后嚴重性分析
肇事后嚴重性分析可根據(jù)式(9)計算得出T1=100.3678,T2=1075.883,再根據(jù)式(10)、(11)計算得出e1=1.0126,e2=1.0123。故各車型期望人車沖突量權重值一致化結(jié)果如表7所示。

表7 各車型期望人車沖突量權重值一致化Tab.7 Calculation of the weight value of the expected pedestrian-vehicle conflict of each model
(3)期望人車沖突量
根據(jù)式(15)計算得到每分鐘內(nèi)人與小型車、大型車的期望人車沖突量D1=9.54pcu/min,D2=0.25pcu/min。
(4)人車沖突風險值
根據(jù)式(16)計算得到無信號控制路段人行橫道處人車沖突風險值為:

結(jié)合表4 無信號控制路段安全風險等級劃分標準,判斷該無信號控制路段人行橫道處人車沖突風險等級為B級,處于較安全水平。
4 結(jié) 論
在分析無信號控制路段人行橫道人車沖突基本特性的基礎上,構(gòu)建無信號控制路段人行橫道人車沖突風險評估模型,劃分安全風險等級并進行實例應用。
(1)分析無信號控制路段人車沖突基本特性。經(jīng)剖析無信號控制路段人行橫道處行人與機動車在發(fā)生沖突時的過程,得出無信號控制路段人車沖突的基本特性:隨機性、可避免性及嚴重性。
(2)構(gòu)建無信號控制路段人車沖突風險評估模型。不同于僅從速度和時間的角度來考慮單個機動車與個體行人之間沖突的嚴重程度,本文模型綜合考慮了人、車、路的相關基本參數(shù)以及人車沖突的概率、肇事后的嚴重性和期望沖突量這三個指標,其中還將行人與機動車在不同碰撞位置下對嚴重性所帶來的影響納入探究范圍,更為全面地描述人車沖突的可能性、嚴重性和曝光程度。該模型可以針對某一具體無信號控制路段人行橫道處的人車沖突風險進行評估。將調(diào)查數(shù)據(jù)帶入模型中獲得模型計算值,其與交通從業(yè)人員主觀打分均值之間的相關性分析驗證了模型的有效性。
(3)建立無信號路段人車沖突安全風險等級劃分標準。基于受訪行人對無信號路段危險感受度調(diào)查問卷,利用模糊隸屬函數(shù)的分級方法得到在水平截集為0.9條件下的5個風險等級的區(qū)間邊界值,最后確定出無信號控制路段人車沖突安全風險值的等級標準量化值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03