基于單片機(jī)的多關(guān)節(jié)機(jī)械臂抓取系統(tǒng)
2022-09-19 04:40:52董一波劉立群李志華顧任遠(yuǎn)周煜博
物聯(lián)網(wǎng)技術(shù) 2022年9期
董一波,劉立群,楊 陽(yáng),李志華,顧任遠(yuǎn),周煜博
(甘肅農(nóng)業(yè)大學(xué) 信息科學(xué)技術(shù)學(xué)院,甘肅 蘭州 730070)
0 引 言
中國(guó)自古是農(nóng)業(yè)大國(guó),以傳統(tǒng)農(nóng)業(yè)生產(chǎn)方式為主。然而,隨著國(guó)際人口的增長(zhǎng),對(duì)自然資源的需求也不斷加大。這使得傳統(tǒng)農(nóng)業(yè)生產(chǎn)出現(xiàn)了越來(lái)越嚴(yán)重的供應(yīng)短缺,自然環(huán)境的負(fù)擔(dān)也成倍增加。為了緩解這種矛盾,最優(yōu)最大化利用自然資源并且將人類從繁重的體力勞動(dòng)中解放出來(lái),科學(xué)界提出了集中生產(chǎn)的現(xiàn)代化農(nóng)業(yè)構(gòu)想。近幾年,智能機(jī)器人頻繁出現(xiàn)在其他領(lǐng)域,考慮將智能機(jī)器人運(yùn)用于農(nóng)業(yè)方面也是一個(gè)不錯(cuò)的方案。迄今為止,應(yīng)用于農(nóng)業(yè)果實(shí)采摘方面的機(jī)器采集系統(tǒng)還沒(méi)有普及,因此本文設(shè)計(jì)一種智能抓取系統(tǒng),能夠幫助采摘果實(shí)。
1 系統(tǒng)的總體構(gòu)成
本文設(shè)計(jì)的機(jī)械臂智能抓取系統(tǒng)由三大模塊組成:視覺(jué)識(shí)別模塊、機(jī)械臂和底座。系統(tǒng)以89C51單片機(jī)為核心操作器、六自由度機(jī)械臂作為執(zhí)行合作機(jī)構(gòu)。視覺(jué)系統(tǒng)通過(guò)攝像頭捕獲圖像后進(jìn)行實(shí)時(shí)處理,并反饋果實(shí)的三維空間坐標(biāo),實(shí)現(xiàn)果實(shí)數(shù)據(jù)的精準(zhǔn)獲得。底座通過(guò)紅外線掃描獲取數(shù)據(jù),實(shí)時(shí)反饋前面路段的信息,實(shí)現(xiàn)小車的單目視覺(jué)正常行駛。系統(tǒng)組成結(jié)構(gòu)如圖1所示。
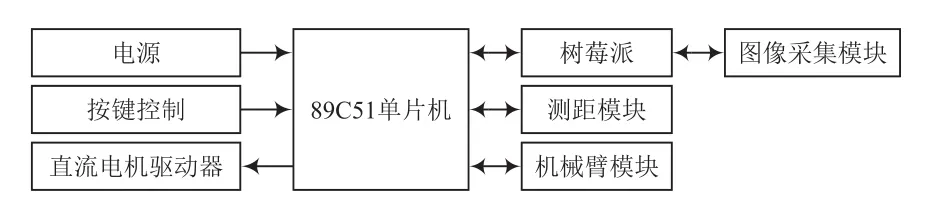
圖1 系統(tǒng)組成結(jié)構(gòu)
2 系統(tǒng)的硬件設(shè)計(jì)
2.1 89C51單片機(jī)
采用51單片機(jī)作為控制系統(tǒng),以89C51為主控芯片,擁有6路接口的PWM舵機(jī)和四個(gè)獨(dú)立接口的總線舵機(jī),實(shí)現(xiàn)按鍵控制、采集電路、電源和過(guò)流保護(hù)。89C51是一種高性能的CMOS8位處理器,通過(guò)電壓控制,32字節(jié)閃存邏輯器件和可擦除只讀存儲(chǔ)器是89C51的重要器件。目前,ATMEL的89C51是一款高效的微控制器,它將8位多功能CPU和閃存集成到一臺(tái)單片機(jī)中。單片機(jī)的結(jié)構(gòu)如圖2所示。
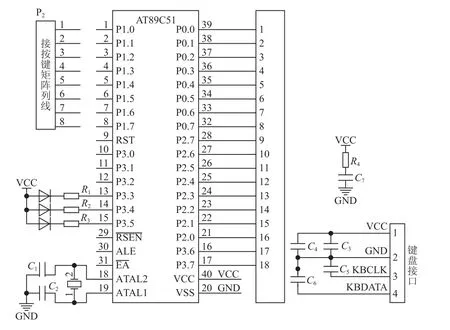
圖2 單片機(jī)的結(jié)構(gòu)
2.2 機(jī)械臂模塊
本抓取系統(tǒng)的機(jī)械臂由力臂和多功能爪子兩部分構(gòu)成。力臂上擁有六個(gè)數(shù)字舵機(jī),分別控制六個(gè)關(guān)節(jié),每個(gè)數(shù)字舵機(jī)都由單片機(jī)單獨(dú)控制,可以實(shí)現(xiàn)不同關(guān)節(jié)伸展或延伸不同的角度,完成不同的工作。為了使機(jī)械手具有良好的柔性,獲得良好的運(yùn)動(dòng)性能,并具有其他類型的角度冗余數(shù)據(jù),采用了六自由度柔性機(jī)械手。機(jī)械臂的結(jié)構(gòu)如圖3所示。采用新型可提升不同通道的機(jī)械臂,實(shí)現(xiàn)空間提升,使分揀機(jī)具有足夠的靈活性。另外,在移動(dòng)平臺(tái)的橡膠墊上設(shè)置了一個(gè)360°旋轉(zhuǎn)緊固桿,避免了因旋轉(zhuǎn)角度不足或夾住殼體而給機(jī)械臂的選擇帶來(lái)不便。后續(xù)根據(jù)實(shí)際的工作情況,針對(duì)不同應(yīng)用領(lǐng)域,通過(guò)六個(gè)關(guān)節(jié)的力矩傳感器與編碼器等工具進(jìn)行數(shù)據(jù)采集;然后通過(guò)一系列方法,主要是人類策略的控制方法、傅里葉級(jí)數(shù)表達(dá)式擬合等,逐步建立一個(gè)運(yùn)動(dòng)軌跡庫(kù),有利于機(jī)械臂在以后的工作中適應(yīng)不同的作業(yè)。
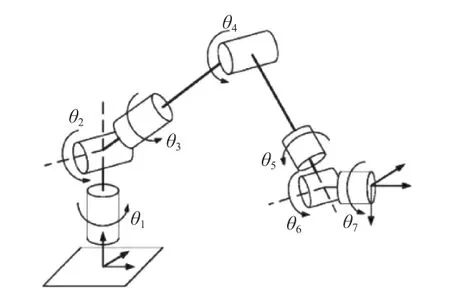
圖3 機(jī)械臂總體結(jié)構(gòu)
爪子是由三個(gè)數(shù)字舵機(jī)控制三個(gè)枝節(jié)組成的,三個(gè)枝節(jié)形成的三角形在抓取果實(shí)時(shí)更具有穩(wěn)定性。三個(gè)數(shù)字舵機(jī)與單片機(jī)相連接,具有同時(shí)性,再提供足夠抓力的前提下保障了爪子的穩(wěn)定性。爪子的材料采用的是柔性材料,在抓取果實(shí)時(shí),爪子可以根據(jù)果實(shí)的大小和形狀,產(chǎn)生相應(yīng)的形變,減小爪子與果實(shí)間的縫隙,盡可能地實(shí)現(xiàn)完美閉合,防止果實(shí)脫落。機(jī)械爪結(jié)構(gòu)如圖4所示。
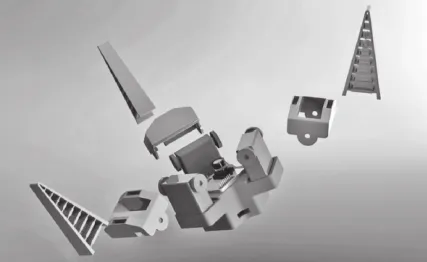
圖4 機(jī)械爪結(jié)構(gòu)
2.3 底座模塊
根據(jù)果園道路泥濘崎嶇的突出特點(diǎn),移動(dòng)平臺(tái)必須具備一定的道路選擇和避障能力。平臺(tái)系統(tǒng)采用四輪差速器,提高了移動(dòng)平臺(tái)的承重能力和穩(wěn)定性,并在一定程度上提高了轉(zhuǎn)向精度,更適合通道內(nèi)的路徑選擇和避障,使移動(dòng)平臺(tái)更加平穩(wěn)安全。每個(gè)輪子由電機(jī)驅(qū)動(dòng)芯片控制單獨(dú)的伺服電機(jī)控制。移動(dòng)平臺(tái)使用鋰電池作為能源,通過(guò)不同的電源處理器及穩(wěn)壓模塊,輸送不同電壓和電流到相應(yīng)的工作單位中,實(shí)現(xiàn)能源的驅(qū)動(dòng)。本文采用E18-D80NK-N紅外線傳感器和US-100超聲波避障模塊。E18-D80NK-N紅外線傳感器的功能:前方無(wú)障礙時(shí)輸出高電平;有障礙時(shí)輸出口電平會(huì)從高電平變成低電平,傳感器檢測(cè)到這一信號(hào)就可以確認(rèn)正前方有障礙物,并傳送給單片機(jī),單片機(jī)通過(guò)輸入內(nèi)部的算法,協(xié)調(diào)小車兩輪工作,從而完成躲避障礙物的動(dòng)作。US-100超聲波避障模塊的主要功能:通過(guò)超聲波發(fā)射裝置發(fā)出超聲波,根據(jù)接收器接到超聲波時(shí)的時(shí)間差就可以測(cè)算距離。超聲波發(fā)射端在單片機(jī)前置電路的驅(qū)動(dòng)下工作,接收端的信號(hào)放大、整形后在單片機(jī)的中斷口產(chǎn)生中斷,通過(guò)發(fā)射和接收的時(shí)間差計(jì)算出小車與障礙物的相對(duì)距離。模擬圖如圖5所示。
圖5 避障模擬圖
2.4 視覺(jué)模塊
為了能夠精準(zhǔn)地抓取果實(shí),在抓取系統(tǒng)中增加視覺(jué)系統(tǒng)。視覺(jué)模塊相當(dāng)于抓取系統(tǒng)的眼睛,其作用決定了采摘果實(shí)的質(zhì)量和現(xiàn)場(chǎng)采摘的速度;同時(shí)在視覺(jué)模塊中引入了深度學(xué)習(xí),重新建立模型和模擬人的大腦進(jìn)行分析和預(yù)測(cè),進(jìn)而處理3D圖像和數(shù)據(jù)。通過(guò)對(duì)攝像機(jī)以各種方式采集的圖像進(jìn)行分析,可以得到PTZ緩動(dòng)控制的能力,以便將來(lái)將運(yùn)動(dòng)目標(biāo)保持在中心區(qū)域。運(yùn)動(dòng)目標(biāo)跟蹤在過(guò)去的十年中得到了廣泛的研究,但在相同的經(jīng)濟(jì)背景下,運(yùn)動(dòng)目標(biāo)跟蹤面臨著許多新的挑戰(zhàn)。進(jìn)一步的優(yōu)化算法可以提高目標(biāo)跟蹤系統(tǒng)的魯棒性。
2.5 藍(lán)牙模塊
本文的操作系統(tǒng)增添了HC-08藍(lán)牙串行通信處理模塊,該模塊是新一代數(shù)據(jù)傳輸系統(tǒng)模塊,基于藍(lán)牙規(guī)范V4.0藍(lán)色協(xié)議。增添藍(lán)牙模塊的作用在于:操作人員可以根據(jù)任務(wù)需求手動(dòng)控制操作系統(tǒng)來(lái)完成相應(yīng)的工作。手機(jī)可以在開放的環(huán)境中實(shí)現(xiàn)80 m網(wǎng)絡(luò)通信。電路如圖6所示。
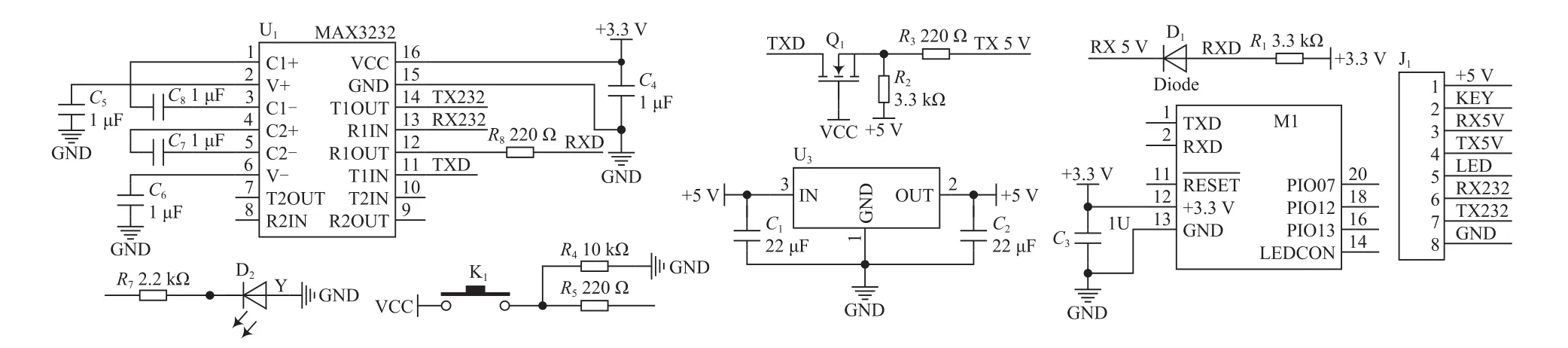
圖6 藍(lán)牙模塊電路
3 結(jié) 語(yǔ)
本文的智能抓取系統(tǒng)以51單片機(jī)作為控制系統(tǒng),89C51作為主控芯片,擁有六路接口的PWM舵機(jī)和四個(gè)獨(dú)立接口的總線舵機(jī),實(shí)現(xiàn)按鍵控制、采集電路、電源和過(guò)流保護(hù)等功能。用樹莓派作為視覺(jué)處理系統(tǒng)的處理芯片進(jìn)行圖像采集;支持藍(lán)牙4.0的遠(yuǎn)程操控,可以通過(guò)手柄、手機(jī)APP和電腦對(duì)機(jī)械臂進(jìn)行操控,實(shí)現(xiàn)機(jī)械臂軀干的活動(dòng)和機(jī)械爪的抓取工作。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09

- 物聯(lián)網(wǎng)技術(shù)的其它文章
- 基于任務(wù)驅(qū)動(dòng)法與拼圖法的數(shù)據(jù)庫(kù)課程小組項(xiàng)目實(shí)踐改革
- 程序設(shè)計(jì)類課程的實(shí)踐與創(chuàng)新能力的培養(yǎng)研究
- 應(yīng)用型本科物聯(lián)網(wǎng)工程專業(yè)課程思政實(shí)踐探索
- 基于MATLAB GUI的《信號(hào)與系統(tǒng)》課程仿真實(shí)驗(yàn)平臺(tái)設(shè)計(jì)
- 面向新工科的物聯(lián)網(wǎng)綜合應(yīng)用教學(xué)與實(shí)踐
- 基于無(wú)線傳感網(wǎng)與人機(jī)交互管控的智能嬰兒車