自驅動關節(jié)臂坐標測量機軌跡優(yōu)化
2022-09-17 02:32:24楊洪濤劉月琪程晶晶
光學精密工程 2022年16期
楊洪濤,劉月琪,程晶晶,沈 梅,胡 毅
(1.安徽理工大學 機械工程學院,安徽 淮南 232001;2.合肥工業(yè)大學 儀器科學與光電工程學院,安徽 合肥 230009)
1 引 言
現有手動式關節(jié)臂測量機(Arm Articulated Coordinate Measuring Machine,AACMM)采 用人力拖拽的測量方式,雖然避免了路徑規(guī)劃問題,但存在測量力不可控制、測量位姿與測量路徑不可復現等問題[1-2]。因此提出一種自驅動關節(jié)臂坐標測量機[3-6](后簡稱為:自驅動關節(jié)臂測量機),通過在旋轉關節(jié)部分引入一體化關節(jié)模組,實現自驅動關節(jié)臂測量機自驅動控制以及對工件幾何特征的自動測量。軌跡規(guī)劃是自動測量中關鍵環(huán)節(jié),且自驅動關節(jié)臂測量機結構與常見工業(yè)機械臂結構相似,因此自驅動關節(jié)臂測量機也需要進行軌跡規(guī)劃及優(yōu)化。
合理的軌跡規(guī)劃有利于提高機械臂測量機的測量精度和測量效率,決定了機械臂的運動方式和工作性能[7]。機械臂的軌跡規(guī)劃[8-9]一般是在關節(jié)空間內和笛卡爾空間內,前者主要有多項式、S形速度曲線等規(guī)劃方法,后者則大多采用插值點坐標逆解的規(guī)劃方式。隨著對測量效率的要求越來越高,出現了以時間、能量、沖擊為目標或多目標的軌跡優(yōu)化算法。馬宇科等[10]針對兩棲機器人的水下軌跡優(yōu)化問題,通過對比基于GCOP與SQP的軌跡算法,證明了使用SQP算法規(guī)劃的路徑更合理、更有效。Amruta Rout等[11]為了降低機器人的位置誤差,采用一種改進的多目標蟻獅算法進行軌跡優(yōu)化,顯著降低了扭矩率和加加速度,使運行時間大大減少。韓江桂等[12]針對機械臂運動效率和沖擊問題采用灰狼算法進行優(yōu)化,降低了運動過程中的振動。袁錦濤等[13]針對工業(yè)機器人多目標綜合最優(yōu)軌跡規(guī)劃問題,采用粒子群算法對五次多項式構造的關節(jié)空間軌跡進行優(yōu)化,有效降低了工業(yè)機器人的沖擊振動,實現了時間-能量-沖擊的性能最優(yōu)。王延年等[14]針對六自由度機器人多目標綜合最優(yōu)軌跡規(guī)劃問題,采用改進粒子群算法對B樣條軌跡規(guī)劃進行優(yōu)化,有效降低運行過程中沖擊振動,實現了時間性能最優(yōu)。
本文基于自驅動關節(jié)臂測量機的機械結構及上述軌跡規(guī)劃、軌跡優(yōu)化的現有研究,提出自驅動關節(jié)臂測量機的混合軌跡規(guī)劃以及基于粒子群算法的多目標測量軌跡優(yōu)化方法,并通過以標準球為測量對象的仿真實驗和實際測量,驗證該方法的有效性。
2 自驅動關節(jié)臂測量機的結構原理與運動軌跡規(guī)劃
2.1 自驅動關節(jié)臂測量機結構原理
自驅動關節(jié)臂測量機的結構主要由6個轉動關節(jié)、3個連桿以及基座,測座,恒力觸發(fā)式測頭串聯組成,如圖1(a)所示。為實現在線自動測量,自驅動關節(jié)臂測量機采用一體化關節(jié)模組,組成部分分別為:驅動電路、伺服電機、諧波減速器、圓光柵等。
為了直觀反映自驅動關節(jié)臂測量機各個關節(jié)之間的運動傳遞關系,本文基于改進的Dena?vit-Hartenberg[15](MD-H)參數法建立自驅動關節(jié)臂測量機的連桿坐標系以及測量模型,坐標系建立情況如圖1(b)所示。
根據MD-H模型所得自驅動關節(jié)臂測量機參數以及坐標系變換的鏈式法則,得到相鄰坐標系之間的齊次變換矩陣,如式(1)所示。

其 中:αi-1為zi-1沿xi-1軸移動到zi軸的距離,ai-1為zi-1軸繞xi-1軸旋轉到zi軸的角度,di為xi-1軸沿zi軸移動到xi軸的距離,θi為xi-1軸繞zi軸旋轉到xi軸的角度。

圖1 自驅動關節(jié)臂測量機結構及MD-H模型Fig.1 Structure and MD-H model of self-driven AAC?MM
其測量模型為測頭到末端坐標系之間所有變換矩陣相乘得到的自驅動關節(jié)臂的正運動學方程,如式(2)所示。

其中:θ1,θ2,…,θ6為關節(jié)角度變量;07T表示測頭末端的位姿。
2.2 自驅動關節(jié)臂測量機的軌跡規(guī)劃
根據自驅動關節(jié)臂測量機的測量過程提出一種混合軌跡規(guī)劃方法,且將自驅動關節(jié)臂測量機的測量過程分為定位、測量、回退三個階段。在定位、回退中選擇關節(jié)空間內的軌跡規(guī)劃,測量階段選用笛卡爾空間內的軌跡規(guī)劃。
測量階段無需復雜路徑且速度過高會造成測量結果不準確和測桿折斷,因此在笛卡爾空間內選擇勻速直線軌跡規(guī)劃,其表達式如式(3)所示。直線插補示意圖如圖2(a)所示。

由于S形加減速法存在勻速段,并能夠提高電機利用率,因此在定位、回退階段中采用末速度不為0的S形加減速法,其運動參數曲線如圖2(b)所示。對圖2(b)中速度函數進行積分求解,得到運行軌跡的時間函數S(t),如式(4)所示。



圖2 軌跡規(guī)劃原理圖Fig.2 Trajectory planning schematic diagram
其中,Si(t)(i=1,2,…,7)表示不同階段運行的軌跡長度。
笛卡爾空間與關節(jié)空間之間的速度映射關系如式(5)所示。其中,v為速度矢量,J為雅可比矩陣,θ?為關節(jié)速度向量。

3 基于PSO的運動軌跡優(yōu)化與仿真
粒子群算法[16](Particle Swarm Optimiza?tion,PSO)是一種進化計算的技術,起源于鳥群捕食的行為研究,簡單易實現,收斂快且魯棒性高,僅有兩個屬性:速度和位置,分別代表移動的快慢和方向。初始值是一個隨機粒子,粒子在每一次迭代中,通過跟蹤兩個極值來更新自己,分別是粒子本身尋找到的最優(yōu)解稱為個體極值和整個種群目前尋找到的最優(yōu)解,用Pbest,Gbest表示,其流程圖如圖3所示。

圖3 粒子群算法流程圖Fig.3 Flow chart of PSO
3.1 目標函數和約束條件
為了保證自驅動關節(jié)臂測量機的測量精度與測量效率,將時間和運動平穩(wěn)性確定為優(yōu)化目標,并用脈沖來評價運動平穩(wěn)性,將多目標優(yōu)化轉為單目標優(yōu)化,因此本文的優(yōu)化目標函數如式(6)所示。

其中:H1表示各關節(jié)的運動總時間,H2表示關節(jié)的脈沖指標,Ti和ji分別表示第i個關節(jié)的運行時間和加加速度,a1、a2為歸一化系數,b1、b2為權重系數。
由于測量段采用勻速直線插補法,對測量時間和運動平穩(wěn)性影響較小,因此只優(yōu)化定位段和回退段中的運動學參數即可滿足優(yōu)化要求。即對定位段和回退段內采取的S形加減速參數進行優(yōu)化。結合自驅動關節(jié)臂測量機的關節(jié)角度、速度、加速度、加加速度等運動學參數限制,七段S形加減法軌跡規(guī)劃的優(yōu)化約束條件如式(7)所示。

其中:v0,v1分別代表軌跡規(guī)劃起點和終點所對應的速度;vimax,aimax,jimax分別表示第i個關節(jié)通過軌跡規(guī)劃可以達到的速度,加速度,加加速度峰值;Tv>0表示整段軌跡規(guī)劃中勻速段存在。
3.2 標準球測量軌跡仿真
為了驗證軌跡優(yōu)化的可行性,開展測量標準球的仿真分析,利用MATLAB中Robotics Tool?box工具箱創(chuàng)建自驅動關節(jié)臂測量機簡化模型及一個標準球,其球心坐標為(14.634 9 mm,482.808 6 mm,221.431 2 mm),半徑為19.056 4 mm。MATLAB仿真系統如圖4(a)所示。為使仿真結果更加貼合測量機實際工作情況,在AD?AMS中搭建測量機的虛擬樣機與標準球的碰撞環(huán)境,分析存在重力、慣性力、觸測力時測量機的定位精度與運動平穩(wěn)性。該環(huán)境中標準球參數與MATLAB仿真中一致,ADAMS虛擬樣機的仿真系統如圖4(b)所示。
需要在標準球表面選取6個測量點擬合完整球體,因此在測量過程中,自驅動關節(jié)臂測量機對該標準球體進行6次測量,每次測量后將會得到一個測量點的實際三維坐標,選取的測量點坐標如表1所示。


圖4 自驅動關節(jié)臂測量機仿真系統Fig.4 Simulation system of self-driven AACMM

表1 選取的測量點坐標Tab.1 Coordinates of selected measuring points
測量段的勻速速度設為5 mm/s,將測點按照測量順序1~6,經過基于粒子群算法的軌跡規(guī)劃后得到整個標準球測量仿真軌跡如圖5所示。
由于測量過程分為定位段、測量段、回退段,因此再引入5個中間點,其坐標分別為(76.56,447.23,234.84),(78.68,526.97,241.99),(-3.98,544.40,231.56),(-64.65,501.35,271.57),(-1.48,515.17,285.03),單位為mm。將測點過程分為6段,第1段是起始點到測量點1,其余五段是中間點到測量點。當測量過程處于定位階段時,測量機以先加速、后勻速、再減速的變速方式運動至測量點附近3~5 mm處。之后進入測量階段,測頭以5 mm/s的速度勻速緩慢觸測空間中的測量點。測頭觸測完畢后,測量機測頭回退至中間點。

圖5 標準球測量仿真軌跡Fig.5 Standard ball measurement simulation trajectory
當自驅動關節(jié)臂測量機產生振動時,因其串聯式結構,誤差會逐級放大,傳至測頭的振動會更明顯,影響最終的測量精度。因此選擇以測頭速度變化來評估自驅動關節(jié)臂測量機在標準球測量過程中的平穩(wěn)性。使用MATLAB對基于粒子群算法的標準球測量優(yōu)化軌跡進行仿真試驗,所得測頭速度曲線如圖6所示。

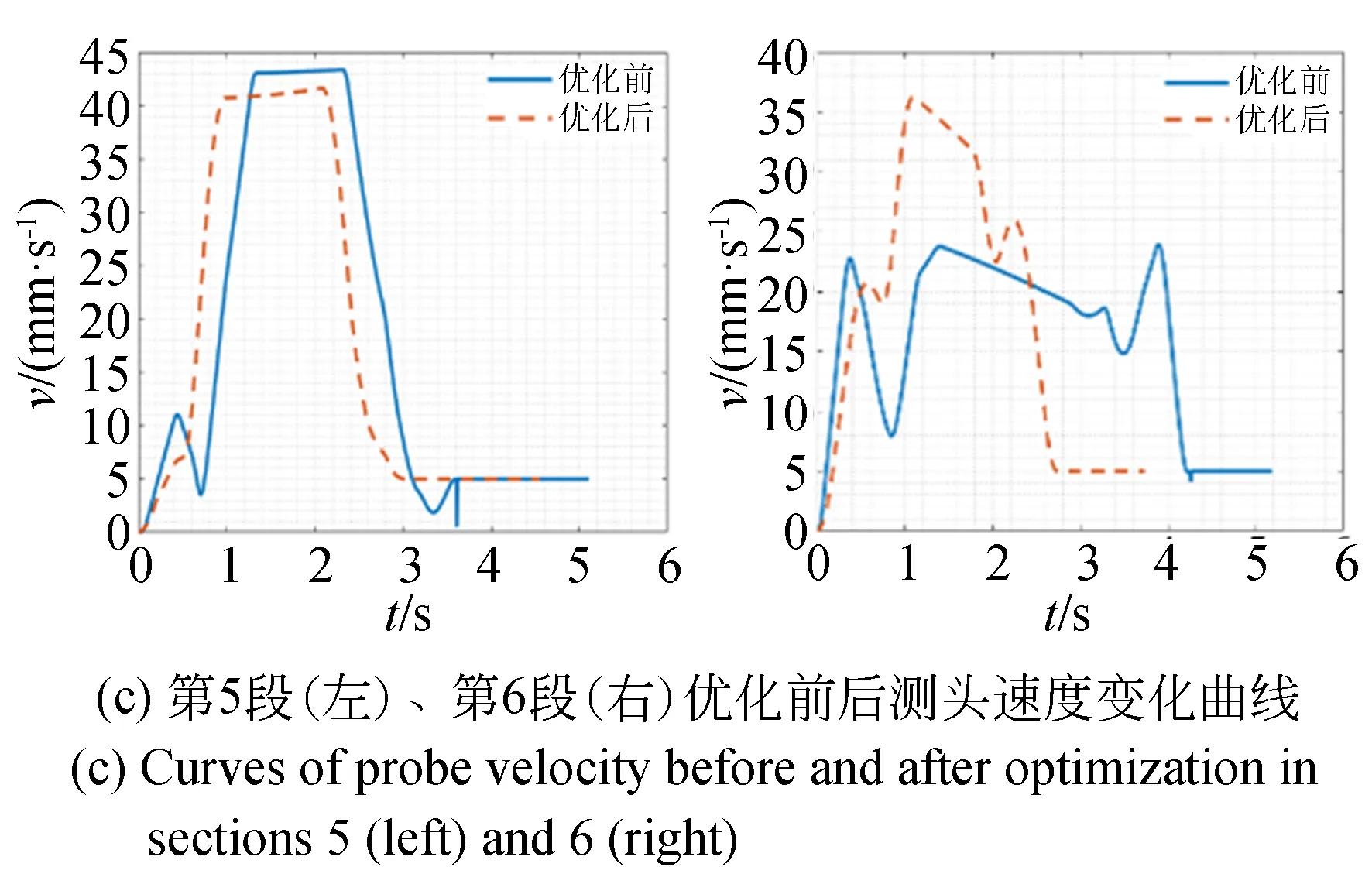
圖6 優(yōu)化前后測頭速度曲線Fig.6 Probe velocity curve before and after optimize
由圖6可知,經基于粒子群優(yōu)化算法軌跡優(yōu)化后,定位階段與測量階段的測頭速度變化曲線變化更為平穩(wěn),且無明顯突變,滿足測量機平穩(wěn)測量的要求。其中,圖6速度曲線存在的宏觀折線性質,驗證了測量機在定位階段的加速—勻速—減速運動特性和測量階段的勻速測量特性。但由于建立的剛柔耦合測量機虛擬樣機在仿真過程中,關節(jié)臂桿件因不同的空間測量姿態(tài)而發(fā)生不同的柔性變形,且相鄰兩個測量點之間的空間距離不同,因此導致測量機測量6個點的速度變化曲線存在差異,且第2~6段優(yōu)化后的定位階段速度微觀變化與第1段的加速—勻速—減速曲線變化特征存在差異。
為了進一步驗證基于粒子群算法的軌跡優(yōu)化方法對提高測量機平穩(wěn)運動測量的有效性,根據圖6仿真結果,求解并繪制出優(yōu)化前后的測量機測頭加速度變化曲線,如圖7所示。
根據圖7可知,經基于粒子群優(yōu)化算法軌跡優(yōu)化后,定位階段與測量階段銜接處的測頭加速度突變情況得到明顯改善,有效降低了測量機從定位轉向測量過程中的測頭振動,提高測量機的在線自動測量精度。
在ADAMS仿真環(huán)境中,分別對基于粒子群算法的標準球測量優(yōu)化軌跡與未優(yōu)化的測量軌跡進行仿真實驗,得到了軌跡優(yōu)化前后所對應實際測量點坐標以及整個測量過程所用的時間,如表2所示。

圖7 優(yōu)化前后測頭加速度曲線Fig.7 Probe accelerate curve before and after optimize
利用最小二乘法[17]將仿真得到的6個實際測量點擬合為球面,擬合得到標準球半徑與誤差如表3所示。
從仿真結果可知,優(yōu)化前測量標準球所需的總時間為63.534 7 s,優(yōu)化后總時間為57.886 2 s,效率提高了8.890 5%。同時標準球體半徑誤差由0.165 5 mm減少到0.056 88 mm,測量精度提高了65.631 4%,該優(yōu)化算法的有效性得到了驗證。

表2 仿真測量點坐標與所用時間Tab.2 Simulation coordinates and measurement time

表3 擬合的球體半徑與誤差Tab.3 Fitting the sphere radius and error
4 標準球測量軌跡實驗驗證
4.1 實驗平臺搭建
為了驗證自驅動關節(jié)臂測量機的實際測量效果,搭建了自驅動關節(jié)臂測量機實驗平臺,如圖8所示,其組成部件有:測頭、測量機本體、電氣箱、上位機。
其中紅寶石測頭采用Renishaw公司的恒力觸發(fā)測頭,一體化關節(jié)模組則采用INNFOS公司的關節(jié)模組。電氣箱是集成了關節(jié)模組驅動與接口電路、測頭電路和NI MYDAQ。上位機軟件由LabVIEW平臺編寫搭建,可以通過導入規(guī)劃好的路徑實現自動測量,并實時顯示自驅動關節(jié)臂測量機的狀態(tài),同時輸出測頭空間坐標等信息。

圖8 自驅動關節(jié)臂測量機實驗平臺Fig.8 Experimental platform of self-drive AACMM
4.2 標準球測量實驗及結果
將自驅動關節(jié)臂坐標測量機樣機固定在工作臺上,標準球通過磁性表座固定在剪式升降臺上,剪式升降臺可調節(jié)標準球在空間中的位置。保持實驗室溫度在20?左右,并保持標準球的空間位置不變,利用自驅動關節(jié)臂測量機測量標準球表面6個點的實際坐標,標準球參數、6個點的理論坐標與仿真實驗相同。
將采用傳統算法規(guī)劃的軌跡和利用粒子群算法的優(yōu)化算法規(guī)劃的混合軌跡分別導入上位機,測量得到6個測量點的實際坐標,再利用最小二乘法把實驗測得的6個點坐標擬合成球體。重復測量標準球實驗5次,經數據處理后得標準球測量半徑。優(yōu)化前后所得測量半徑和誤差如表4所示。上位機采樣時間為10 ms,根據采集的角度數據個數計算得到優(yōu)化前測量機測量標準球耗時62.91 s,優(yōu)化后測量機測量標準球耗時57.35 s。
實驗表明:軌跡優(yōu)化后,標準球半徑的平均測量誤差由0.057 1 mm降至0.042 3 mm,降幅為25.919 4%,測量時間由62.91 s降至57.35 s,效率提升了8.838%,驗證了該軌跡優(yōu)化算法的有效性,能夠提高自驅動關節(jié)臂坐標測量機的自動測量精度。

表4 優(yōu)化前后的測量半徑和誤差Tab.4 Measurement radius and error before and after op?timization
5 結 論
本文提出基于粒子群算法的自驅動關節(jié)臂測量機多目標軌跡優(yōu)化方法,根據時間和運動平穩(wěn)性綜合確定了軌跡優(yōu)化的目標函數,并通過基于粒子群算法的S形加減速和勻速直線插補法進行混合軌跡規(guī)劃,實現了運行時間和運動平穩(wěn)的性能完善。通過實驗驗證,使用基于粒子群算法的多目標測量軌跡優(yōu)化方法后,自驅動關節(jié)臂測量機測得的標準球半徑誤差值從0.057 1 mm下降為0.042 3 mm,降低了25.919 4%,測量時間由62.91 s降至57.35 s,提升了8.838%,表明該方法優(yōu)化效果明顯。所提出的基于粒子群算法的軌跡優(yōu)化方法保證了自驅動關節(jié)臂測量機平穩(wěn)運行,提高了自驅動關節(jié)臂測量機的在線測量精度和效率。
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年8期)2019-05-09 02:22:48
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21