基于渦旋光與平面波干涉的微位移測量
2022-09-17 04:41:50韓世澤楊棟胡曉寧楊忠明莊新港劉兆軍
光學(xué)精密工程 2022年17期
韓世澤,楊棟,胡曉寧,楊忠明*,莊新港,劉兆軍
(1.山東大學(xué) 信息科學(xué)與工程學(xué)院,山東 青島 266237;2.山東大學(xué) 激光與紅外系統(tǒng)集成技術(shù)教育部重點(diǎn)實驗室,山東 青島 266237;3.中國電子科技集團(tuán)公司第四十一研究所,山東 青島 266555)
1 引言
渦旋光束是一種波前結(jié)構(gòu)呈螺旋狀、中心處光場復(fù)振幅為零且光強(qiáng)呈環(huán)形分布的新型光束。19世紀(jì)人們觀測到光渦旋現(xiàn)象后,隨激光技術(shù)及渦旋光理論的發(fā)展,人們不斷對這種新型光束進(jìn)行探 索。1994年,Allen等 基 于Hermite-Gauss光束制成Laguerre-Gaussian光束[1]。1995年,He等直接觀察了角動量向吸收粒子的轉(zhuǎn)移并形成具有相 位 奇 點(diǎn) 的激 光 束 的過 程[2]。2002年,Mac-Donald等研究了三維光阱結(jié)構(gòu)的產(chǎn)生和操縱方法[3]。2005年,Shvedov等人利用介質(zhì)楔產(chǎn)生了高階光學(xué)渦旋[4]。2008年,Milne等利用一種可調(diào)諧流體錐形透鏡,產(chǎn)生了渦旋光束[5]。2015年,Vaity等利用貝塞爾光束的傅里葉變換制備了完美的渦旋光[6]。2020年,Ding等基于低頻外差干涉測量方法,利用CCD相機(jī)觀測到渦旋光的相位分布[7]。2022年,本課題組提出了一種共形映射-空間相移干涉測量方法,測量和解調(diào)了拓?fù)浜蔀?,2,4和6的OAM模式螺旋波前,進(jìn)一步推動了渦旋光的波前解調(diào)與應(yīng)用[8]。
隨著現(xiàn)代精密加工及檢測精度要求的不斷提高,精度已進(jìn)入納米量級,為滿足現(xiàn)代測量需求,人們通過改良測量原理、光路設(shè)計和編碼算法等不斷提高測量系統(tǒng)的精度與分辨力[9]。渦旋光因具有角動量自由度,干涉圖信息量較多,在干涉測量技術(shù)中的應(yīng)用受到了越來越多的關(guān)注。2011年,F(xiàn)ujimoto等討論了渦旋光束與多種光束在旋轉(zhuǎn)及位移測量中的應(yīng)用[10]。2017年,Olivier等基于共軛渦旋光干涉在理論上將高精度微位移測量推進(jìn)到皮米級[11]。2019年,Yadav等利用共軛渦旋光設(shè)計了一種高精度干涉裝置,測量精度達(dá)到皮米級[12]。同年,Sirenko等將太赫茲渦旋光束用做磁激勵光譜探針,展示了渦旋光束在磁學(xué)探測中的優(yōu)異表現(xiàn)[13]。2020年,Emile等研究了共軛渦旋光的旋轉(zhuǎn)多普勒頻移,討論了共軛渦旋光干涉在物體旋轉(zhuǎn)定位和檢測的前景應(yīng)用[14]。2014年,孫平等對渦旋光的干涉特性及它在測量變形物體離面位移的應(yīng)用進(jìn)行了系統(tǒng)研究[15]。2020年,趙冬娥等基于渦旋光與球面波干涉,采用計算切線角度的方法得到中心螺旋條紋旋轉(zhuǎn)角度計算位移[16]。同年,夏豪杰等基于正負(fù)共軛渦旋光干涉,以質(zhì)心定位判斷干涉圖的旋轉(zhuǎn)角度并計算了位移[17]。2022年,Lu等基于共軛渦旋光干涉,通過擬合相位變化曲線得到圖像旋轉(zhuǎn)角度計算位移[18]。同年,本課題組提出了基于雙波長光學(xué)渦旋的共相誤差相移干涉測量方法,對共相誤差中位移誤差的測量精度達(dá)到約4.04 nm[19]。
為了進(jìn)一步提高微位移測量精度,本文設(shè)計了一種基于渦旋光與平面波干涉的位移測量系統(tǒng),建立并驗證了花瓣狀干涉圖旋轉(zhuǎn)角度與位移的線性關(guān)系。以改進(jìn)的馬赫-曾德干涉儀結(jié)構(gòu)為基礎(chǔ),結(jié)合渦旋光束干涉光路,搭建了高分辨率精密位移測量系統(tǒng)。基于模型干涉圖的特殊性質(zhì)提出一種高精度數(shù)據(jù)處理方法,顯著降低了測量誤差與偶然性。對比實驗結(jié)果表明,基于渦旋光與平面波干涉的微位移測量技術(shù)具有原理新穎、結(jié)構(gòu)簡單和測量準(zhǔn)確等優(yōu)點(diǎn)。
2 系統(tǒng)設(shè)計與仿真分析
2.1 系統(tǒng)設(shè)計
本文設(shè)計的測量方案是以渦旋光與平面波干涉模型為基礎(chǔ),平面波為測試光,渦旋光為參考光,將待測物體的位移變化轉(zhuǎn)化為測試光的光程變化。由于兩光束干涉產(chǎn)生的花瓣狀干涉圖在待測物體位移過程中產(chǎn)生旋轉(zhuǎn),根據(jù)建立的干涉圖旋轉(zhuǎn)角度與位移的線性關(guān)系,通過檢測干涉圖的旋轉(zhuǎn)角度計算被測位移。光路設(shè)計如圖1所示,器件參數(shù)見表1。He-Ne激光器出射光經(jīng)BS1分束,平面參考光經(jīng)SPP變?yōu)闇u旋參考光射入BS2。平面測試光經(jīng)BS3打在平面反射鏡M后回射依次進(jìn)入BS3,BS4,最終與參考光經(jīng)BS2合束后干涉,成像在CMOS的光敏面上。位移臺PECP承載平面反射鏡M以作階梯位移,由CMOS采集得到位移前后花瓣狀干涉圖。

圖1 基于渦旋光與平面波干涉的微位移測量光學(xué)系統(tǒng)Fig.1 Optical system of micro-displacement measurement based on interference of vortex beams and plane wave
由于兩光束的初始光強(qiáng)僅影響干涉圖的對比度,為簡化運(yùn)算,令兩光束的初始光強(qiáng)均為1。
平面測試光的電場強(qiáng)度EP為:

拓?fù)浜蒻=4的渦旋光作為參考光,可簡寫為:

其中:xv為光程,φv為渦旋光初相位。
兩束光在BS2處干涉,此時CMOS相機(jī)上的干涉光強(qiáng)為:

當(dāng)待測物體產(chǎn)生位移S=vt,其中v為平面反射鏡的運(yùn)動速度,t為平面反射鏡的運(yùn)動時間。由于光路往返,測試光的光程變化為二倍的平面反射鏡位移,測試光光程變化為:ΔxP=2S,相位變化為Δφ,故CMOS相機(jī)上的干涉光強(qiáng)為:

取光強(qiáng)I最大時:

移項將位移量與旋轉(zhuǎn)量分離,整理得到:2kS+kxP-kxv+(φP-φv)+Δφ=mθ。求 導(dǎo)得:

式(6)表明,干涉圖旋轉(zhuǎn)角度與微位移的變化量呈簡單的線性關(guān)系,通過測量花瓣狀干涉圖的旋轉(zhuǎn)角度可以計算出微位移量。激光波長為632.8 nm時,干涉圖旋轉(zhuǎn)1°對應(yīng)的位移為3.52nm。
2.2 系統(tǒng)仿真與驗證
為了驗證2.1節(jié)提出的微位移測量系統(tǒng)模型,如圖2所示,在Zemax光學(xué)設(shè)計與仿真軟件中仿真了渦旋光與平面波干涉微位移測量系統(tǒng)。點(diǎn)光源出射的波長為633 nm的激光束經(jīng)透鏡準(zhǔn)直為一束平面波,經(jīng)BS1后分為兩束。參考光通過SPP變?yōu)橥負(fù)浜蔀?的渦旋光束進(jìn)入BS2。測試光經(jīng)BS3后,經(jīng)反射鏡M反射依次進(jìn)入BS3,BS4,與參考光于BS2合束。

圖2 微位移測量仿真光路Fig.2 Optical path simulation of micro-displacement measurement

圖3 位移前后干涉圖仿真結(jié)果Fig.3 Interference intensity before and after micro-displacement in simulation
最終探測器D采集到的花瓣狀干涉圖如圖3所示。當(dāng)平面反射鏡M在x軸方向產(chǎn)生微小位移時,花瓣狀干涉圖發(fā)生旋轉(zhuǎn)。
如圖4(a)所示,干涉圖的中心坐標(biāo)為原點(diǎn)(0,0),另 取 任 意 一 點(diǎn) 坐 標(biāo)P(x1,y1),由θ=計算該點(diǎn)與中心坐標(biāo)連線與橫軸的夾角,由計算采樣點(diǎn)到中心坐標(biāo)的距離。繼續(xù)提取距離圓心距離為r的圓周區(qū)域,以rsinθ=acos(brcosθ+c)+d的 基 本 公 式 進(jìn) 行余弦擬合,r為采樣點(diǎn)到圓心的距離,θ為采樣點(diǎn)到圓心連線與橫軸的夾角。

圖4 數(shù)據(jù)采集示意圖Fig.4 Schematic diagram of data acquisition
如圖4(b)所示,逐步改變提取區(qū)域到中心坐標(biāo)的距離r,多次采樣計算相位變化取均值計算位移量。
3 實驗
3.1 實驗系統(tǒng)與算法分析
為了驗證本文提出的微位移測量模型及數(shù)據(jù)處理算法,搭建的實驗驗證系統(tǒng)如圖6所示。該系統(tǒng)由光源及光源擴(kuò)束系統(tǒng)、干涉測量系統(tǒng)和位移反饋反射鏡構(gòu)成。其中,干涉測量系統(tǒng)采用改進(jìn)馬赫-曾德干涉儀光路結(jié)構(gòu),包括分光鏡、螺旋相位板以及CMOS相機(jī)等。以高精密壓電納米位移臺承載平面反射鏡作為位移發(fā)生裝置,測量系統(tǒng)器件參數(shù)見表1。在測量實驗中,波長為632.8 nm的激光光束經(jīng)擴(kuò)束后進(jìn)入分光鏡BS1,參考光依次經(jīng)SPP,BS2。測試光經(jīng)過BS3入射到位移系統(tǒng)中待測平面鏡M上并反射,依次經(jīng)BS3,BS4后進(jìn)入BS2與參考光干涉。平面反射鏡M位移為100.0 nm,步長為10.0 nm,由CMOS采集位移過程中的干涉圖。

圖5 數(shù)據(jù)處理流程Fig.5 Flow chart of data processing

表1 微位移測量系統(tǒng)的器件參數(shù)Tab.1 Components parameters of micro-displacement measurement system
數(shù)據(jù)處理流程如圖5所示,首先根據(jù)參考光背景確定光束中心。如圖7所示,通過對比度調(diào)節(jié),邊緣檢測,聯(lián)通區(qū)篩選等步驟以及圖形中心計算得到渦旋光背景的中心坐標(biāo)。
確定中心坐標(biāo)后,在花瓣狀干涉圖中以中心坐標(biāo)為圓心,提取距離圓心為r的圓周區(qū)域。改變r的大小多次提取圖像信息,采用rsinθ=acos(brcosθ+c)+d進(jìn)行余弦擬合。如圖8所示,r為采樣點(diǎn)到圓心的距離,θ為采樣點(diǎn)與圓心連線與橫軸夾角。
從擬合曲線中提取各自的相位數(shù)據(jù),即可得到每一幅位移圖像的像素曲線。通過采集位移前后圖像的像素曲線,計算出相位變化的均值,即可得出旋轉(zhuǎn)角度。根據(jù)已建立的旋轉(zhuǎn)角度與位移變化的對應(yīng)關(guān)系,可計算出實際位移。

圖6 微位移測量實驗裝置Fig.6 Experimental devices for micro-displacement measurement

圖7 光束中心坐標(biāo)提取Fig.7 Extraction of beam center coordinate

圖8 干涉圖數(shù)據(jù)處理坐標(biāo)示意圖Fig.8 Schematic diagram of interferogram coordinate data processing

圖9 實驗采集的干涉圖Fig.9 Interferogram collected in experiment

圖10 位移數(shù)據(jù)曲線Fig.10 Curves of displacement data
實驗結(jié)果如圖9所示,平面反射鏡位移后,花瓣狀干涉圖產(chǎn)生明顯的旋轉(zhuǎn)。實驗采集到的花瓣狀干涉圖與仿真結(jié)果一致。數(shù)據(jù)處理結(jié)果如圖10所示,擬合結(jié)果RMSE=0.150 2,擬合效果較好。由于光路往返,系統(tǒng)的實際位移應(yīng)為200.0 nm。由圖10(b)可知,平面反射鏡以20.0nm步長進(jìn)行位移,經(jīng)計算位移量為196.3 nm,與實際位移相比誤差為3.7 nm,誤差百分比為1.9%。
設(shè)置位移為200.0 nm,每10次實驗為一組,共計10組重復(fù)實驗,結(jié)果如圖11和表2所示。平均測量誤差約為±2.9 nm,平均誤差百分比為1.5%。實驗誤差主要受三個方面因素的影響:首先是環(huán)境因素,包括實驗環(huán)境的溫度、濕度、氣壓等參數(shù)變化引起的折射率與波長變化;其次是實驗系統(tǒng)硬件,包括激光器頻率漂移,輸出光束的穩(wěn)定性,壓電位移臺在啟動、停止過程中的微振動,CMOS相機(jī)采樣速率與分辨率,電子噪聲以及系統(tǒng)光學(xué)元件的質(zhì)量,如螺旋相位板的均勻性、分光鏡的加工質(zhì)量等;最后是系統(tǒng)優(yōu)化及算法的有效實現(xiàn)程度,包括測量過程中干涉圖中心定位的準(zhǔn)確程度,數(shù)據(jù)采集結(jié)果的有效性,相位曲線擬合結(jié)果與實際采集數(shù)據(jù)的一致性等。
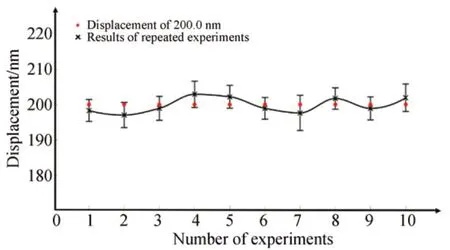
圖11 重復(fù)實驗結(jié)果Fig.11 Experimental results of repeated experiments

表2 重復(fù)實驗結(jié)果Tab.2 Experimental results of repeated experiments(nm)
如圖12(a)所示,在測量連續(xù)微位移時,采集到的相位數(shù)據(jù)出現(xiàn)包裹相位,位移曲線出現(xiàn)相位包裹現(xiàn)象。若在一個連續(xù)的相位區(qū)間末端檢測到相位大幅度變化(與相位包裹區(qū)間相當(dāng)),將處于新相位區(qū)間的部分整體提高一個包裹區(qū)間,得到連續(xù)無包裹相位的實驗數(shù)據(jù)曲線。解包裹后的相位變化曲線如圖12(b)所示。

圖12 相位變化曲線Fig.12 Curves of phase changing
控制位移臺進(jìn)行不同行程的位移測量,實驗結(jié)果如圖13和表3所示。

圖13 不同位移的測量結(jié)果Fig.13 Measurement results of different displacements

表3 不同位移的測量結(jié)果Tab.3 Measurement results of different displacements(nm)
改變渦旋光拓?fù)浜蛇M(jìn)行位移測量(100.0,200.0,300.0,400.0,500.0 nm),實驗結(jié)果如圖14所示。選用拓?fù)浜蛇^大的渦旋光,其干涉圖中花瓣狀亮斑數(shù)量多、體積小,延伸的葉狀干涉圖排布過于密集。雖然相位擬合過程中可提取的波峰組數(shù)多,但每組波峰可供提取的像素點(diǎn)較少,擬合較為困難,測量精度較低。選用拓?fù)浜蛇^小的渦旋光,花瓣狀亮斑數(shù)量過少,雖然每組波峰可供提取的像素點(diǎn)較多,但可提取的波峰組數(shù)較少,擬合結(jié)果偶然性大。選用拓?fù)浜蔀?的渦旋光,測量精度最高。

圖14 不同拓?fù)浜傻臏u旋光實驗測量結(jié)果Fig.14 Measurement results of vortex beams with different topological charges
3.2 對比實驗
為了驗證本文提出的渦旋光與平面波干涉微位移測量方法的優(yōu)越性,將本測量系統(tǒng)與共軛渦旋光干涉[18]、基于渦旋光與球面波干涉[16]等方法進(jìn)行對比實驗。搭建了渦旋光與平面波干涉、渦旋光與球面波干涉、渦旋光與共軛渦旋光干涉3組實驗。如圖15(a)所示,在渦旋光與平面波干涉實驗中,采集方法為對花瓣狀干涉圖進(jìn)行多次圓周采樣并擬合得出相位變化均值、旋轉(zhuǎn)角度。如圖15(b)所示,在渦旋光與共軛渦旋光干涉實驗中,采集方法為對小花瓣狀干涉圖進(jìn)行一次圓周采樣擬合相位。如圖15(c)所示,在渦旋光與球面波干涉實驗中,采集方法為擬合位移螺旋條紋的中心切線計算角度變化。
渦旋光與平面波干涉方法的花瓣狀干涉圖從暗核附近的4個花瓣狀亮斑開始,呈葉狀向外延伸,特征點(diǎn)更多;一次采樣即可提取4組波峰進(jìn)行計算,對圖片的邊緣質(zhì)量要求不高,可供采樣區(qū)域多,便于實現(xiàn)多次采樣重復(fù)計算,計算結(jié)果更加精確。相比之下,共軛渦旋光干涉圖的主要特征區(qū)域集中在暗核結(jié)構(gòu)附近的花瓣狀亮斑,位移增大,干涉圖中心暗核面積增大,花瓣狀亮斑排布過于密集,圓周采樣時明暗條紋較窄,可采集的數(shù)據(jù)量少,擬合較為困難,圖像分辨率要求較高。渦旋光與球面波干涉圖需要精確提取中心螺旋條紋的切線角度,對中心螺旋條紋邊緣的圖像質(zhì)量要求高,當(dāng)干涉圖分辨率較低時,測量誤差較大,且在連續(xù)實時測量中難以精確提取,可供采樣的條紋區(qū)域較模糊,多次采樣的實現(xiàn)難度較大。共進(jìn)行5組對比實驗,結(jié)果見表4。

圖15 三種干涉圖及數(shù)據(jù)處理方法對比Fig.15 Comparison of three interferograms and calculation methods

表4 三種測量方式結(jié)果對比Tab.4 Comparison of results of three measurement methods
4 結(jié)論
本文基于渦旋光與平面波的干涉模型,研究了干涉圖變化與位移變化的對應(yīng)關(guān)系,建立并驗證了花瓣狀干涉圖旋轉(zhuǎn)角度與位移的線性關(guān)系,提出了一種微位移測量方法。搭建了位移實驗系統(tǒng),測量實驗得到的計算位移量為196.3 nm,與系統(tǒng)實際位移200.0 nm相比,誤差為3.7 nm。與球面波干涉和共軛渦旋光干涉的對比實驗表明,基于渦旋光與平面波的干涉測量方法在測量精度及可靠性方面具有顯著的優(yōu)勢。基于渦旋光與平面波干涉的微位移測量方法是一種高精度、高靈敏度、更為簡單實用的測量方法。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
