基于滑模擾動(dòng)觀測器和積分滑模控制器的活塞加速度控制研究
2022-09-15 09:15:02杜迎慧李強(qiáng)郗建國
機(jī)床與液壓 2022年11期
關(guān)鍵詞:系統(tǒng)
杜迎慧,李強(qiáng),郗建國
(1.新鄉(xiāng)職業(yè)技術(shù)學(xué)院交通學(xué)院,河南新鄉(xiāng) 274015;2.河南未來機(jī)電工程有限公司, 河南鄭州 450066;3.河南科技大學(xué)車輛與交通工程學(xué)院,河南洛陽 471003)
0 前言
流體技術(shù)涉及液壓和氣動(dòng)技術(shù),已廣泛用于各種場合中,如工廠中的重工業(yè)設(shè)備、機(jī)器人、建筑機(jī)械以及起重搬運(yùn)機(jī)械。液壓系統(tǒng)由不可壓縮的流體提供動(dòng)力,經(jīng)常用于要求高性能、高精度和高負(fù)荷控制的系統(tǒng)中。氣動(dòng)系統(tǒng)利用壓縮氣體作為工作介質(zhì)而具有物理意義上的彈性,可以在整個(gè)系統(tǒng)中起減振作用。在過去的幾十年中,對(duì)執(zhí)行器的控制研究主要在活塞的位置或速度跟蹤上,由于極其敏感和高度非線性的系統(tǒng)特性,其加速度跟蹤非常困難。因此,設(shè)計(jì)電液-氣動(dòng)混合執(zhí)行器系統(tǒng),建立其數(shù)學(xué)模型,研究活塞的加速度控制具有重要意義。
文獻(xiàn)[2-3]研究了氣動(dòng)執(zhí)行器的位置跟蹤問題,構(gòu)建了實(shí)驗(yàn)?zāi)P停o出了系統(tǒng)數(shù)學(xué)模型,在非線性PID基礎(chǔ)上,用粒子群優(yōu)化算法優(yōu)化速動(dòng)率和非線性增益,并加入死區(qū)補(bǔ)償,開發(fā)了自調(diào)節(jié)非線性PID控制器,通過實(shí)驗(yàn)證明了該控制器的可行性。文獻(xiàn)[4-5]提出了線性自抗擾控制器對(duì)氣缸進(jìn)行位置控制,設(shè)計(jì)實(shí)驗(yàn)平臺(tái),建立系統(tǒng)動(dòng)力學(xué)模型,設(shè)計(jì)了線性擴(kuò)張狀態(tài)觀測器和線性狀態(tài)誤差反饋控制器,并通過實(shí)驗(yàn)驗(yàn)證了該控制器的有效性。文獻(xiàn)[6-7]研究液壓驅(qū)動(dòng)活塞的位置控制,建立了液壓缸驅(qū)動(dòng)系統(tǒng)簡化示意圖,推導(dǎo)系統(tǒng)數(shù)學(xué)模型,基于神經(jīng)網(wǎng)絡(luò)算法和模糊切換規(guī)則對(duì)滑模控制器進(jìn)行優(yōu)化,最后通過MATLAB驗(yàn)證該方案的合理性。目前的研究主要采用單一液壓或者氣壓進(jìn)行活塞運(yùn)動(dòng)控制,而沒有將兩者結(jié)合起來。此外,在復(fù)雜的電液-氣動(dòng)混合執(zhí)行器系統(tǒng)中,執(zhí)行器位置的準(zhǔn)確估計(jì)通常較難實(shí)現(xiàn)。同時(shí),考慮到系統(tǒng)動(dòng)力學(xué)理論模型難以做到無偏差地體現(xiàn)實(shí)物系統(tǒng),會(huì)使外部干擾對(duì)系統(tǒng)的影響加劇,最終使控制性能進(jìn)一步變差。對(duì)此,本文作者采用基于滑動(dòng)擾動(dòng)的觀測器和積分滑模控制器對(duì)活塞加速度進(jìn)行控制。設(shè)計(jì)電液-氣動(dòng)混合執(zhí)行器系統(tǒng),建立電液-氣動(dòng)混合執(zhí)行器系統(tǒng)動(dòng)力學(xué)模型。在積分滑模控制器的基礎(chǔ)上,結(jié)合具有基于超扭曲算法估算復(fù)合擾動(dòng)能力的滑模擾動(dòng)觀測器,開發(fā)結(jié)合了滑模擾動(dòng)觀測器和積分滑模控制器的綜合控制器。在MATLAB軟件中對(duì)活塞運(yùn)動(dòng)進(jìn)行仿真驗(yàn)證,與傳統(tǒng)PID控制器仿真結(jié)果進(jìn)行對(duì)比,為活塞加速度精確控制提供參考。
1 電液-氣動(dòng)混合執(zhí)行器系統(tǒng)數(shù)學(xué)建模
圖1所示為電液-氣動(dòng)混合執(zhí)行器系統(tǒng)簡化圖。該系統(tǒng)由3個(gè)關(guān)鍵子系統(tǒng)構(gòu)成,分別為氣動(dòng)動(dòng)力系統(tǒng)、伺服液壓系統(tǒng)和機(jī)械制動(dòng)執(zhí)行器系統(tǒng)。氣動(dòng)動(dòng)力系統(tǒng)直接驅(qū)動(dòng)氣動(dòng)執(zhí)行器。伺服液壓系統(tǒng)向制動(dòng)系統(tǒng)提供液壓力,以控制活塞的運(yùn)動(dòng)。氣動(dòng)系統(tǒng)中的壓縮氣體使活塞能夠在大致不變的壓力下正向運(yùn)動(dòng),而液壓系統(tǒng)中不可壓縮流體的精確交替壓力會(huì)阻礙執(zhí)行機(jī)構(gòu)的傳動(dòng),從而精確控制其加速度。整個(gè)系統(tǒng)由工業(yè)計(jì)算機(jī)控制,該計(jì)算機(jī)接收系統(tǒng)的運(yùn)行參數(shù)并將控制信號(hào)發(fā)送到具有高頻帶寬的伺服閥。
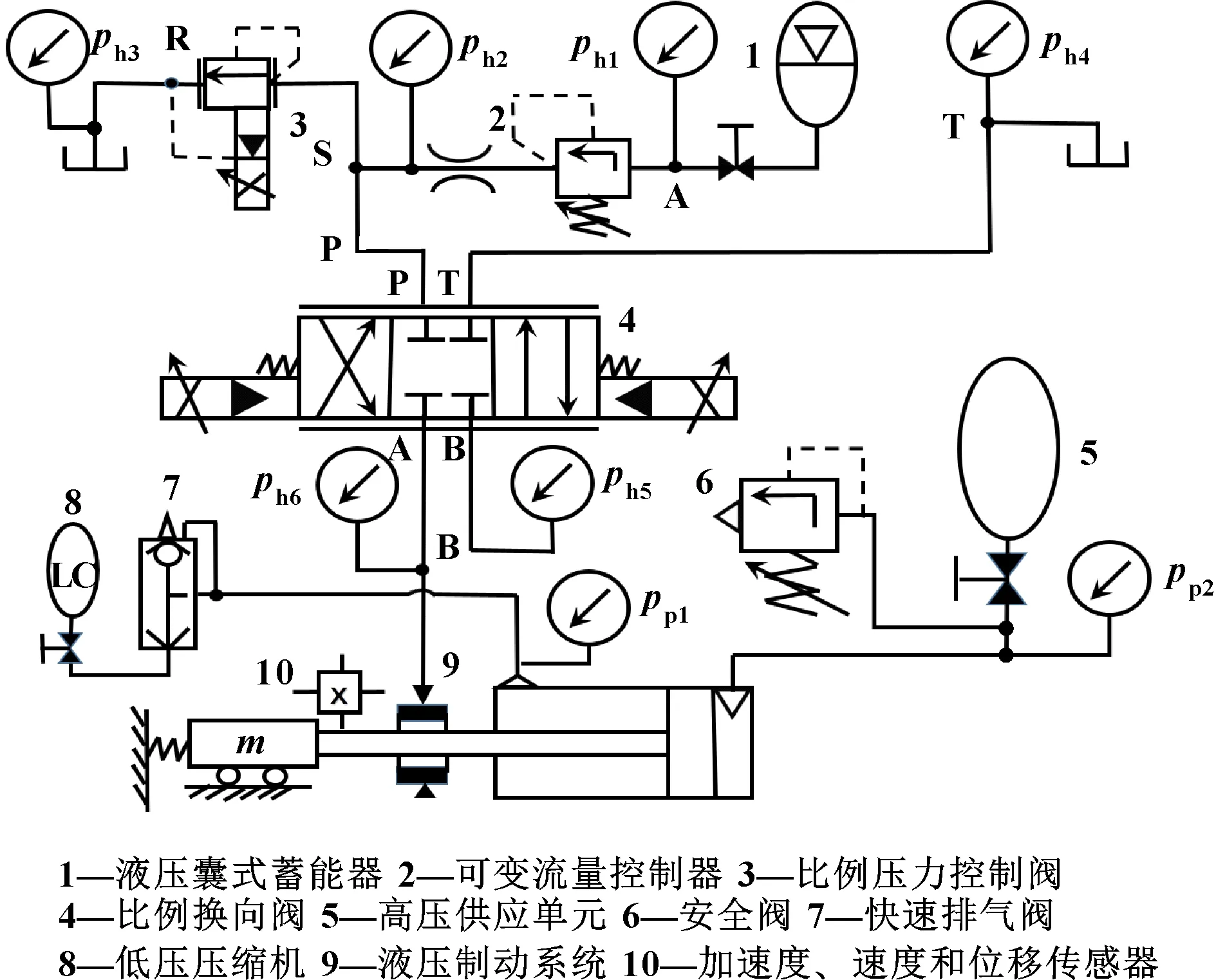
圖1 電液-氣動(dòng)混合執(zhí)行器系統(tǒng)簡化圖
執(zhí)行器受到活塞兩側(cè)壓縮氣體、活塞和外部質(zhì)量塊的慣性力以及運(yùn)動(dòng)時(shí)的約束力等壓力沖擊。根據(jù)牛頓第二定律并將力投射到運(yùn)動(dòng)方向,活塞運(yùn)動(dòng)的動(dòng)力學(xué)方程為


(1)
其中:和分別為活塞和外部負(fù)載的質(zhì)量;為活塞與氣缸之間的摩擦因數(shù);為與對(duì)液壓系統(tǒng)施加的沖擊有關(guān)的等效剛度;和分別為活塞運(yùn)動(dòng)時(shí)的約束力、外部質(zhì)量塊的約束力;和分別為活塞的有效面積和活塞桿的橫截面積;為制動(dòng)腔內(nèi)的壓力;為制動(dòng)活塞有效面積;為制動(dòng)襯塊和活塞桿之間的穩(wěn)態(tài)摩擦因數(shù);和分別表示摩擦速度指數(shù)函數(shù)的乘數(shù)和參數(shù)系數(shù);()為影響活塞運(yùn)動(dòng)的復(fù)合擾動(dòng)。
供給壓力方程為



(2)
其中:為閥門的排放系數(shù);為可變流量控制器的流通面積;為液壓油密度;和分別為比例壓力控制閥和換向閥的排放系數(shù);為比例換向閥閥芯直徑;為比例壓力控制閥閥芯直徑;()和()分別為輸入信號(hào)和的函數(shù);為液壓油的有效容積模量;()為可變流量控制器的流量;為液壓油的動(dòng)力黏度;表示從點(diǎn)到比例換向閥的管道長度;為管道的內(nèi)徑。sg()定義如下:
(3)
比例壓力控制閥閥芯的動(dòng)力學(xué)方程為

(4)
其中:為閥芯的質(zhì)量;為閥芯移動(dòng)時(shí)的阻尼系數(shù);為伺服閥復(fù)位彈簧的等效剛度;為控制器的輸入增益;為閥的輸入電壓;為來自內(nèi)部壓力與外部壓力之差的流體力系數(shù)。
比例換向閥閥芯的動(dòng)力學(xué)方程為

(5)
其中:為阻尼比;為伺服閥的固有頻率;Δ為壓降;為噴射角;和分別為閥芯的直徑和出口高度;為比例換向閥控制比例系數(shù)。
制動(dòng)腔內(nèi)壓力的動(dòng)力學(xué)方程為


(6)
其中:為端口A和T連接時(shí)比例換向閥的排放系數(shù)。
2 控制系統(tǒng)

將每個(gè)非線性方程視為單輸入單輸出系統(tǒng),一般形式為
?

={=,∈[1,],,∈}
(7)
其中:(,)和(,)為非線性函數(shù);()為擾動(dòng)的有界函數(shù);()為每個(gè)系統(tǒng)的輸入信號(hào);= [,,…,]。
滑動(dòng)面定義為

(8)

因此,狀態(tài)空間中的滑動(dòng)表面改為


(9)
(10)
一階時(shí)間導(dǎo)數(shù)為

(11)
根據(jù)方程(7)和(11),得到:

(,)()+()]=-sgn()
(12)
選擇綜合控制律為


(13)
用如下飽和函數(shù)sat()代替函數(shù)sgn():
(14)
根據(jù)方程(13)和(14),整個(gè)積分滑模控制器可以分為三部分:
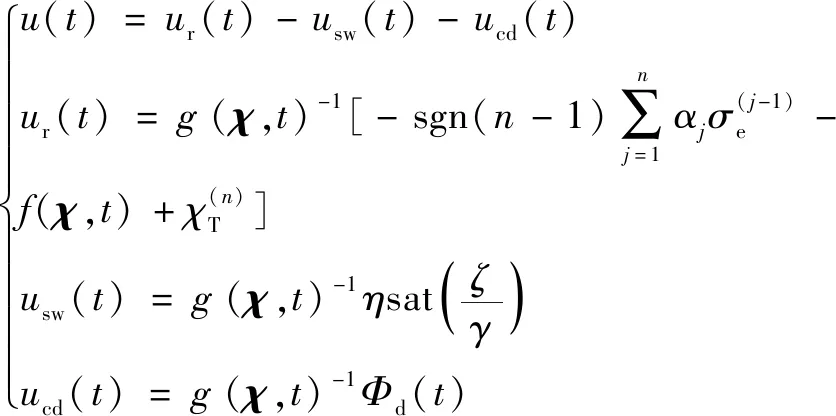
(15)
其中:()用于將系統(tǒng)狀態(tài)合并到滑動(dòng)表面;()通過切換律得到;()用于補(bǔ)償滑模擾動(dòng)觀測器估計(jì)的復(fù)合擾動(dòng)。
圖2所示為滑模擾動(dòng)觀測器-積分滑模控制器的結(jié)構(gòu)。系統(tǒng)的機(jī)械狀態(tài)參數(shù)直接由高階積分滑模控制器1控制。在輸入到機(jī)械系統(tǒng)之前,通過滑模擾動(dòng)觀測器將輸入信號(hào)添加到復(fù)合干擾的補(bǔ)償中。由于式(6)所示的動(dòng)力學(xué)模型中顯示的比例換向閥的布置不平衡,開發(fā)了開關(guān)技術(shù)來提供控制信號(hào)。該開關(guān)技術(shù)分別使用基于反向動(dòng)態(tài)模型和正向動(dòng)態(tài)模型的積分滑模控制器2R和積分滑模控制器2F。積分滑模控制器2的指令信號(hào)成為積分滑模控制器3的期望值,信號(hào)是積分滑模控制器3的指令信號(hào)。
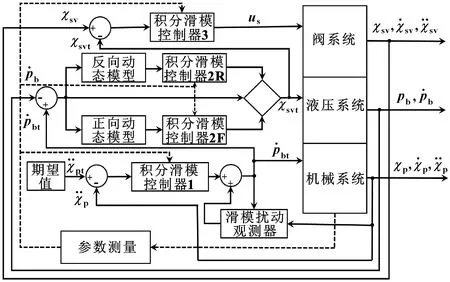
圖2 滑模擾動(dòng)觀測器-積分滑模控制器結(jié)構(gòu)
活塞動(dòng)力學(xué)方程(1)的數(shù)學(xué)模型變?yōu)?/p>



e- -]
(16)
其中:=1/(+)。





(17)
(18)

(19)
積分滑模控制器3經(jīng)計(jì)算為



(20)


(21)
擾動(dòng)的非線性微分函數(shù)為

(22)
其中:函數(shù)()為未知的有界擾動(dòng);()為狀態(tài)變量;和為觀測器系數(shù)。和的公式分別為
[()]=|()|12sg[()]
(23)

(24)
因此,滑模擾動(dòng)觀測器經(jīng)計(jì)算為
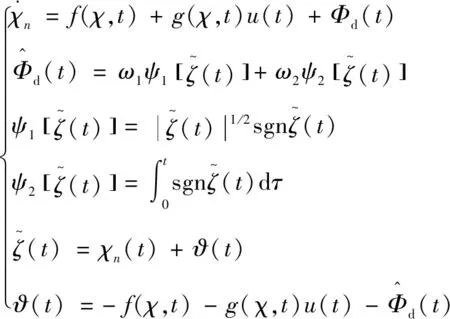
(25)
滑模擾動(dòng)觀測器主要側(cè)重于消除機(jī)械系統(tǒng)的干擾。因此,利用滑模擾動(dòng)觀測器-積分滑模控制器控制策略,不僅能克服快速運(yùn)動(dòng)過程中系統(tǒng)的極端敏感性,而且還能消除在跟蹤快速增益調(diào)度的活塞運(yùn)動(dòng)時(shí)內(nèi)部參數(shù)的不確定性和外部負(fù)載干擾。
3 仿真模擬
為驗(yàn)證所設(shè)計(jì)的電液-氣動(dòng)混合執(zhí)行器系統(tǒng)的可行性,同時(shí)對(duì)比傳統(tǒng)PID控制器與滑模擾動(dòng)觀測器-積分滑模控制器的控制效果,在MATLAB/Simulink環(huán)境下,對(duì)電液-氣動(dòng)混合執(zhí)行器系統(tǒng)進(jìn)行仿真。仿真參數(shù):=60 kg,=300 kg,=20 N·s/m,=7 450 N/m,=105 N,=86 N,=25×10m,=13×10m,=8.4×10m,=0.44,=0.125,=0.023,=0.65,=880 kg/m,==0.55,=0.005 m,=0.007 m,=2×10N/m,=2.2×10m,=4.22 m,=0.004 m,=0.2 kg,=250 N·s/m,=65 kN/m,=0.04 mm/V,=0.45,=0.8,=10 Hz,=1.22 rad,=6.2 mm,=4.3 mm,=0.25。
無外部干擾情況下,當(dāng)系統(tǒng)期望加速度響應(yīng)為方波曲線形響應(yīng)(幅值40 m/s,頻率0.5 Hz)時(shí),傳統(tǒng)PID以及滑模擾動(dòng)觀測器-積分滑模控制器的響應(yīng)曲線如圖3所示。可知:電液-氣動(dòng)混合執(zhí)行器系統(tǒng)采用滑模擾動(dòng)觀測器-積分滑模控制器控制時(shí),超調(diào)量小;采用傳統(tǒng)PID控制器控制時(shí),超調(diào)量增加54%,同時(shí)達(dá)到穩(wěn)態(tài)時(shí)間更長。
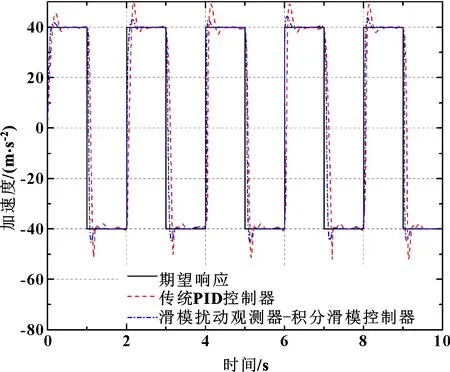
圖3 傳統(tǒng)PID及滑模擾動(dòng)觀測器-積分滑模控制器控制下的方波響應(yīng)
進(jìn)一步驗(yàn)證對(duì)不同響應(yīng)曲線的跟蹤效果,期望加速度響應(yīng)為正弦波形(幅值40 m/s,頻率0.5 Hz)時(shí),得到如圖4所示的傳統(tǒng)PID以及滑模擾動(dòng)觀測器-積分滑模控制器的響應(yīng)曲線。可以看出:傳統(tǒng)PID控制器下的加速度跟蹤誤差在±2.5 m/s之內(nèi);滑模擾動(dòng)觀測器-積分滑模控制器下的跟蹤誤差減少約65%。
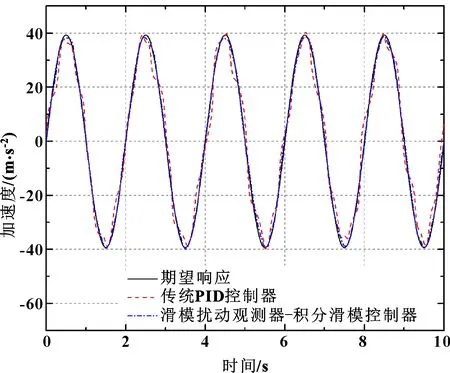
圖4 傳統(tǒng)PID及滑模擾動(dòng)觀測器-積分滑模控制器控制下的正弦響應(yīng)
為驗(yàn)證所設(shè)計(jì)的滑模擾動(dòng)觀測器-積分滑模控制器的抗干擾性能,在正弦響應(yīng)下,分別在2、4.2以及7.1 s對(duì)系統(tǒng)施加一個(gè)隨機(jī)干擾,結(jié)果如圖5所示。可見:滑模擾動(dòng)觀測器-積分滑模控制器下的加速度曲線在隨機(jī)干擾下的誤差和偏移比傳統(tǒng)PID控制器的小,同時(shí)其消除干擾影響的時(shí)間明顯變短。

圖5 隨機(jī)干擾下的活塞加速度響應(yīng)
為驗(yàn)證滑模擾動(dòng)觀測器-積分滑模控制器對(duì)活塞位置的跟蹤效果,在上個(gè)實(shí)驗(yàn)的基礎(chǔ)上進(jìn)行測試,結(jié)果如圖6所示。可以看出:滑模擾動(dòng)觀測器-積分滑模控制器下活塞的位置與期望位置基本一致,在外部干擾作用下,活塞位置波動(dòng)較小。
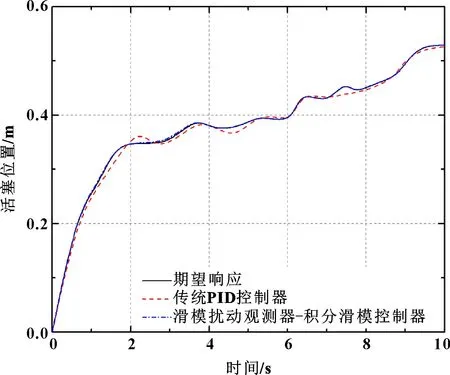
圖6 活塞位置響應(yīng)
因此,采用滑模擾動(dòng)觀測器-積分滑模控制器的電液-氣動(dòng)混合執(zhí)行器系統(tǒng),可補(bǔ)償擾動(dòng)并精確跟蹤活塞的加速度和位置。
4 結(jié)論
本文作者結(jié)合單一液壓和氣動(dòng)技術(shù)的優(yōu)點(diǎn),設(shè)計(jì)了用于活塞加速度控制的電液-氣動(dòng)混合執(zhí)行器系統(tǒng),構(gòu)建了電液-氣動(dòng)混合執(zhí)行器系統(tǒng)簡化模型及建立電液-氣動(dòng)混合執(zhí)行器系統(tǒng)動(dòng)力學(xué)方程。在積分滑模控制器的基礎(chǔ)上,添加了用于消除機(jī)械系統(tǒng)干擾的滑模擾動(dòng)觀測器。在MATLAB中對(duì)活塞加速度以及位置進(jìn)行仿真驗(yàn)證,并與傳統(tǒng)PID控制器的仿真結(jié)果進(jìn)行對(duì)比。結(jié)果表明:采用基于滑模擾動(dòng)觀測器和積分滑模控制器的活塞,不僅加速度跟蹤精度高、抗干擾性強(qiáng),同時(shí)位置跟蹤誤差小。研究結(jié)果可為活塞加速度控制的研究提供參考。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
