考慮光伏輸出功率裕度的直流配電網自適應下垂控制
2022-09-13 05:56:46張彤鈺
可再生能源 2022年9期
劉 青,張彤鈺
(華北電力大學 電氣與電子工程學院,河北 保定 071003)
0 引言
多光伏電源經變流器并聯接入直流配電網,既可以滿足本地直流負載的需求,又可以補充外部輸配電網絡[1],[2]。下垂控制以其高可靠性、通信獨立性以及良好的冗余度在直流配電網中得到了廣泛的應用[3]。
傳統下垂控制的下垂系數按分布式電源額定容量成比例設定,當系統總不平衡功率達到閾值時,各變流器承擔的不平衡功率與其設定的下垂系數成反比[4]。在實際運行中,光伏電源輸出功率固有的隨機性和波動性,為并聯系統下垂控制的可靠運行帶來新的挑戰。文獻[5]通過引入虛擬電阻和電流補償,達到抑制并聯變流器間環流、準確分配負荷功率及穩定直流母線電壓的效果。文獻[6],[7]在直流側設置較大的虛擬電容,提高了直流微電網暫態調節能力。文獻[8]提出了一種基于饋線首端電壓追蹤的下垂控制策略,在保證良好的母線電壓控制特性的基礎上,降低線路損耗。文獻[9]利用變流器輸出端電壓偏差信息,實時調整下垂控制的運行工作點及下垂系數值以減小直流電壓的偏差。但虛擬慣量控制方法只能在變流器輸出端電壓變化時起到調節作用,系統重新穩定后下垂系數將恢復原有數值,無法一直維持調節作用。現有文獻中下垂系數改變仍基于并網端電壓變化,未考慮可再生能源輸出功率裕度的不確定性。對于多光伏電源并聯系統,各變流器并網端電壓相差不大,并網端電壓變化特性無法完全反映光伏電源輸出功率裕度的變化特性。
本文在分析光伏輸出功率裕度對光伏側變流器輸入電壓影響的基礎上,利用變流器輸入和輸出側電壓變化量判斷負載及光伏輸出功率裕度的情況,對下垂系數引入基于光伏側變流器輸入端電壓偏差的修正量,使輸出功率裕度大的光伏電源在系統負荷增加時產生更多的功率,輸出功率裕度小的光伏電源在系統負荷減少時產生更少的功率。建立光伏側變流器輸出阻抗模型,理論分析本文所提優化方法對系統穩定性的影響。最后,基于Matlab搭建多光伏電源并聯接入直流配電網仿真模型,驗證本文所提控制策略的可行性。
1 多光伏變流器并聯接入直流配電網拓撲結構
本文采用的多光伏并聯接入直流配電網系統拓撲如圖1所示。為了研究光伏輸出功率裕度對光伏側電壓的影響,本文采用3個額定容量相等的光伏電源。圖 中:Upvi,Ipvi,Ppvi分 別 為 光 伏 電 源PVi輸 出 的 電壓、電 流 及 功 率;Uoi,Idi,Pdi分 別 為 光 伏 側 變 流 器DC/DCi輸 出 電 壓、電 流 及 功 率;Ioi,Poi分 別 為 光 伏側變流器DC/DCi輸入直流母線電流和功率;Cpvi為光伏側變流器DC/DCi輸入側電容;Coi為光伏側變流器DC/DCi輸出側電容;Roi為負載等效阻抗;為本地直流額定負載。直流配電網通過網側變流器DC/DC與交流電網進行能量交換。
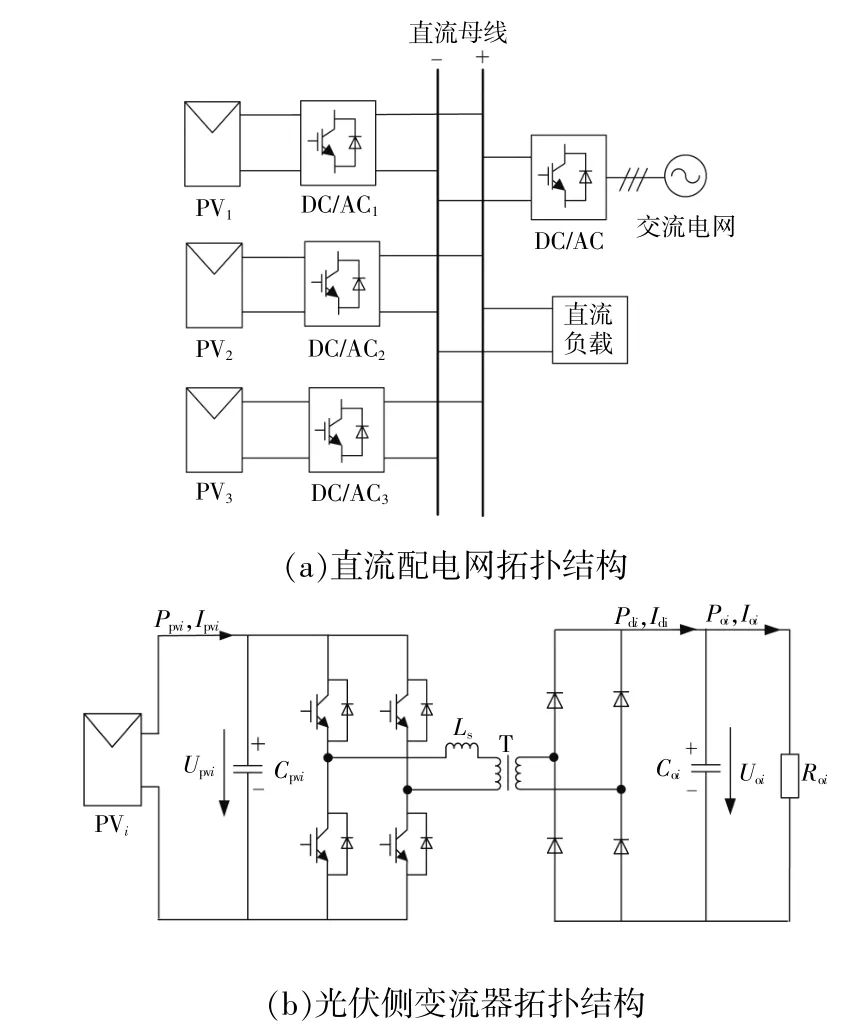
圖1 多光伏并聯接入直流配電網系統拓撲結構Fig.1 Topology of multi photovoltaic parallel connected DC distribution network system
正常情況下,網側變流器具有穩定直流母線電壓的作用,光伏側變流器運行于最大功率點跟蹤(MPPT)模式,光伏電源輸出功率除滿足本地直流負載外,其余輸入交流電網。當交流電網發生故障需要有功功率及無功功率支撐時,網側變流器由定電壓控制切換到輸入交流電網的有功、無功(PQ)控制,向外輸出有功功率Pw。此時網側變流器無需調節直流配電網母線電壓;光伏側變流器由MPPT控制切換到下垂控制,能夠穩定直流配電網母線電壓,并向交流電網及直流負荷定功率輸出。
2 考慮光伏輸出功率裕度的直流配電網自適應下垂控制
2.1 光伏側變流器輸入端電壓與光伏輸出功率裕度的關系
根據光伏電源輸出功率特性[10],在光伏側電容器充電階段,光伏輸出電流等于短路電流,光伏側電壓不斷增大,光伏輸出功率不斷升高,到達光伏最大輸出功率點后,隨著電壓升高輸出功率將減小,最終達到光伏側變流器輸入、輸出功率平衡。
光伏電源Ppv-Upv輸出特性方程為[11]
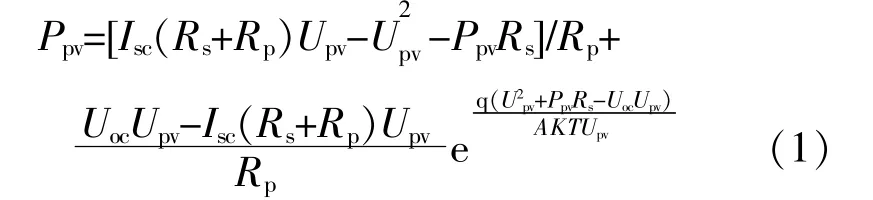
式中:A為光伏電源二極管理想常數;Rs為光伏電源串聯電阻,Ω;Rp為光伏電源并聯電阻,Ω;q為電 荷 量;Iph為 光 生 電 流,A;Isc為 短 路 電 流,A;K為玻爾茲曼常數;T為光伏電源環境溫度,℃;Uoc為開路電壓,V。
光伏電源Ppv-Upv特性曲線如圖2所示。
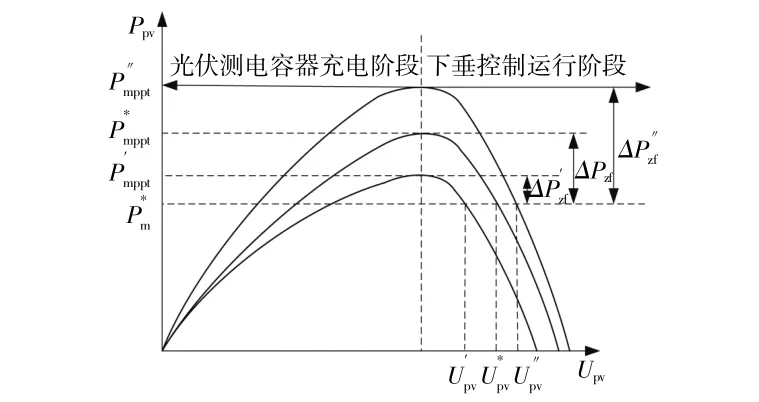
圖2 光伏電源Ppv-Upv特性曲線Fig.2 Ppv-Upv characteristic curve of PV power supply
2.2 直流配電網下垂控制方法
傳統P-U下垂控制表達式為
改進下垂控制方法是對下垂系數引入基于系統實際運行時,輸出端電壓偏差的修正量[12],或基于輸出端電壓變化量dUoi/dt的修正量[6]。由于光伏側變流器并網端電壓Uoi的變化無法反應光伏電源輸出功率裕度的變化,因此,現有基于變流器輸出端電壓變化量修正的下垂控制改進方法,無法在系統負荷變化的情況下,根據各光伏電源實際輸出功率裕度的變化情況調節輸出功率。而基于dUoi/dt修正的下垂控制改進方法,只由在光伏側變流器并網端電壓Uoi變化的瞬間產生作用,無法長時間維持控制效果,也無法解決由系統功率長時間變化而引發的系統穩定性問題。
在傳統下垂控制方法和改進下垂方法的系統中,當某臺光伏達到最大出力,無法繼續增大輸出功率時,將下垂控制切換為MPPT控制,其余光伏繼續維持下垂控制。若系統中各光伏功率裕度的變化引起變流器控制模式頻繁切換,會增大變換器輸出電壓和光伏輸出功率的波動,系統穩定性變差[13],[14]。對于系統中輸出功率裕度較大的光伏電源PVi,現有的下垂控制改進方法不能判斷出與輸出功率裕度小的光伏電源的區別,因此,將要求其與輸出功率裕度小的光伏電源輸出相同的功率,不能充分利用其輸出功率裕度調節母線電壓。同時,利用光伏側變流器輸入端和輸出端電壓信息,可以合理分配光伏電源因輸出功率裕度不同時系統的不平衡功率。
2.3 考慮光伏輸出功率裕度的直流配電網自適應下垂控制
直流系統在負載功率變化,且交流系統不通過網側變流器對直流母線電壓進行調節的情況下,在直流負載增大的起始階段,由于系統功率缺額,Uoi將減小,下垂控制將增加光伏電源功率,因此Upvi也會減小,向MPPT點電壓靠近,最終再次達到光伏側變流器兩端功率平衡,系統穩定運行;在直流負載減小的起始階段,由于系統功率冗余,Uoi將增大,下垂控制將減少光伏電源功率,因此Upvi也會增大而遠離MPPT點電壓,最終再次達到光伏側變流器兩端功率平衡,系統穩定運行。
本文所提出的方法在考慮負載功率變化影響的基礎上,對下垂系數引入基于光伏變流器輸入端電壓(±ΔUpv-Upvi)的修正量。考慮光伏輸出功率裕度的直流配電網自適應下垂控制的下垂系數為

式中:Δkdroopia為系統負荷減小時下垂系數修正量;Δkdroopib為系統負荷增大時下垂系數修正量。
Δkdroopia與 Δkdroopib的 計 算流 程 如圖3所 示。
由 圖3可 知 , 當Uoi∈[Uoref-ΔUoref,Uoref+ΔUoref]時,判斷為系統正常運行,Δkdroopia=Δkdroopib=0。設置合理的采樣時間將兩側電壓信號離散化,ε1為變流 器 輸 出 側 電 壓 判 斷 閾 值,ε1>0;ε2為 變 流 器 輸 入端 電 壓 判 斷 閾 值,ε2>0。
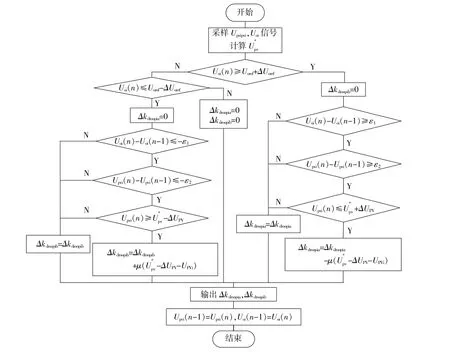
圖3 下垂系數修正量Δkdroopia,Δkdroopib的計算流程圖Fig.3 Calculation flow chart ofΔkdroopia,Δkdroopib
為了排除由控制器超調引起的電壓波動現象,本文采用組合判據判斷系統負荷變化。計算變流 器 兩 端 電 壓 信 號 差Uoi(n)-Uoi(n-1)和Upvi(n)-Upvi(n-1)。若Uoi(n)-Uoi(n-1)≤-ε1且Upvi(n)-Upvi(n-1)≤-ε2,則 判 斷 為 系 統 負 載 增 加;若Uoi(n)-Uoi(n-1)≥ε1且Upvi(n)-Upvi(n-1)≥ε2,判 斷 為 系統負載減小。當系統運行狀態判斷為負荷增大時,Δkdroopia=0。為了使額定輸出功率裕度的光伏電源也 參 與 功 率 調 節,以 μ(-ΔUPV-UPVi)為 步 長,減小光伏側電壓高于(-ΔUPV)的變流器i的下垂系數增量 Δkdroopib,且在負載切除電壓恢復額定電壓前 一直 保持 Δkdroopia及 Δkdroopib數值 ,使輸 出功 率裕度大的光伏電源輸出更多的功率,輸出功率裕度小的光伏電源下垂系數不變。
當系統運行狀態判斷為負載減小時,Δkdroopib=0。為了使額定輸出功率裕度的光伏電源也參與功率 調 節,以-μ(+ΔUPV-UPVi)為 步 長,減 小 光 伏 側電壓低于 (+ΔUPV)的變流器i的下垂系數Δkdroopia,且在負載重新投入電壓恢復額定電壓前,一 直 保 持 Δkdroopia及 Δkdroopib數 值 。
下垂系數過小會導致較大的環流損耗,因此需要對下垂系數的最小值進行限制。下垂系數最小值的設置方法為[15]

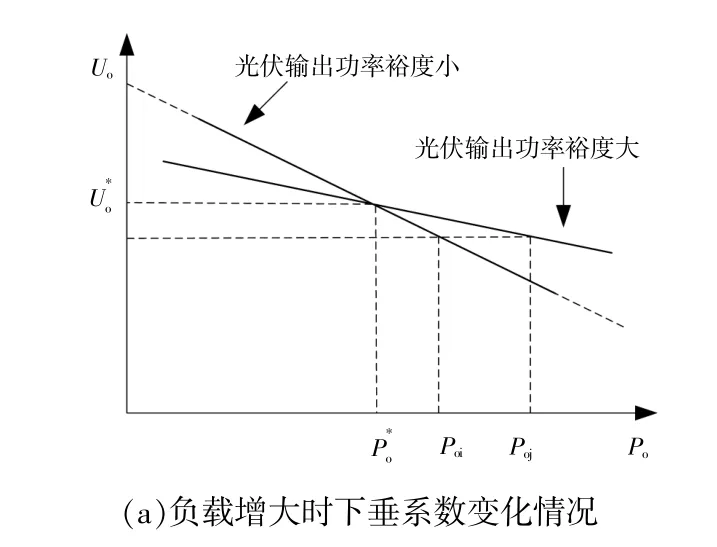
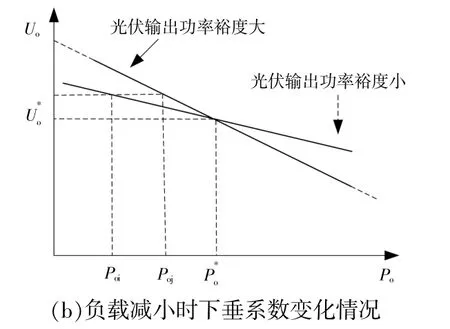
圖4 下垂系數變化情況Fig.4 Variation of droop coefficient
3 自適應下垂控制設計及輸出阻抗特性建模
3.1 P-U下垂控制的電壓電流雙環控制的控制系統設計
光伏側變流器自適應P-U下垂控制的電壓電流雙環控制如圖5所示。電壓外環確定光伏側變流器輸出電流的參考值,以穩定輸出電壓。電流內環根據實現電流的跟蹤控制。通過輸入Upvi及Uoi信 號,對 下 垂 系 數 修 正 量 Δkdroopia,Δkdroopib進 行整定。GDC/DC-I為光伏側DC/DC變流器的輸出電流Id與占空比D之間的傳遞函數。
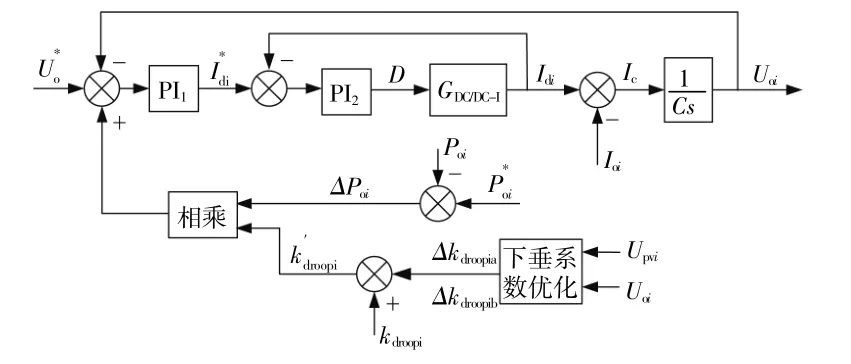
圖5 P-U下垂控制的電壓電流雙環控制框圖Fig.5 Control block diagram of voltage and current double loop control of P-U droop control
3.2 并聯光伏側變流器等效阻抗模型
選定光伏側變流器的狀態變量為輸出電流Id和輸出電壓Uo。在變壓器T匝數比為1∶1且無損耗 的 情 況 下,列 出 狀 態 空 間 方 程[16],[17]:
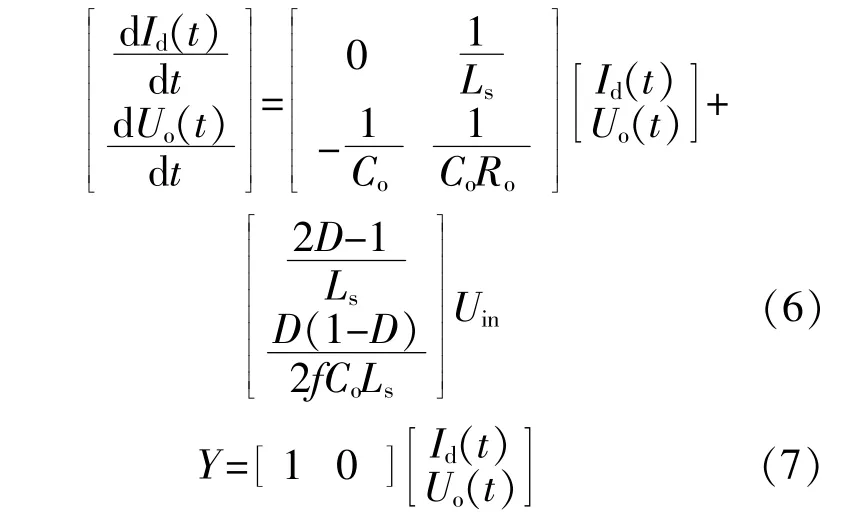
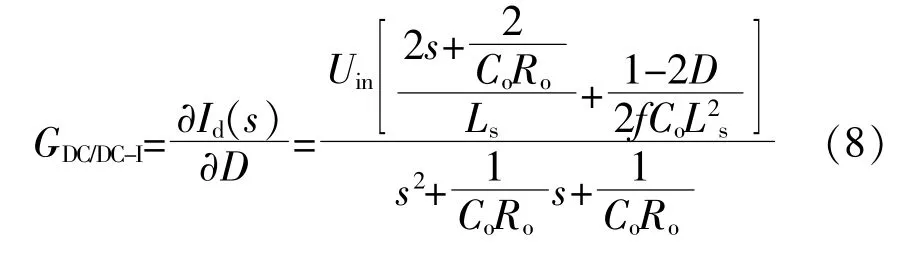
由 式(6),(7)得 出GDC/DC-I為
電流內環閉環傳遞函數為

根據式(6)得出與下垂系數相關的系統傳遞函數為

式中:GPI1(s)為電壓外環PI控制器的傳遞函數。
對式(10)的 ΔPoi進行小信號處理后可得:
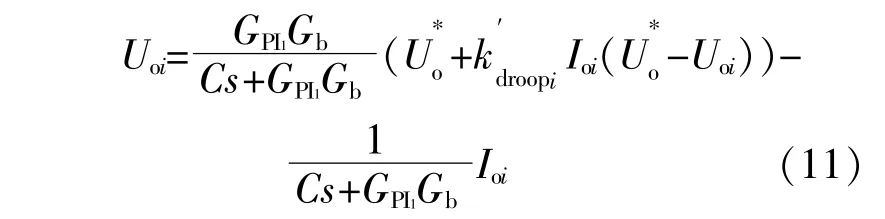
將下垂控制等效為電壓源時,輸出阻抗表達式為
本次提升面積為4 200 m2。該節點是在保留原有鋪裝的基礎上,增加點景大樹,提升景觀效果,如圖8所示。

并聯系統等效輸出阻抗Zbl的表達式為

在圖1拓撲結構中,光伏側變流器與網側變流器是交互的子系統,光伏側變流器在下垂控制模式時等效為電壓源,網側變流器在PQ控制模式時等效為電流源。在兩個交互的子系統中,等效為電壓源的子系統阻抗越小,等效為電流源的子系統阻抗越大,系統越穩定。由式(13)可知,任意一個光伏側變流器等效輸出阻抗減小,Zbl都將減小,系統穩定性得到了提高。
3.3 算例分析
直流配電網系統主要參數如表1所示。
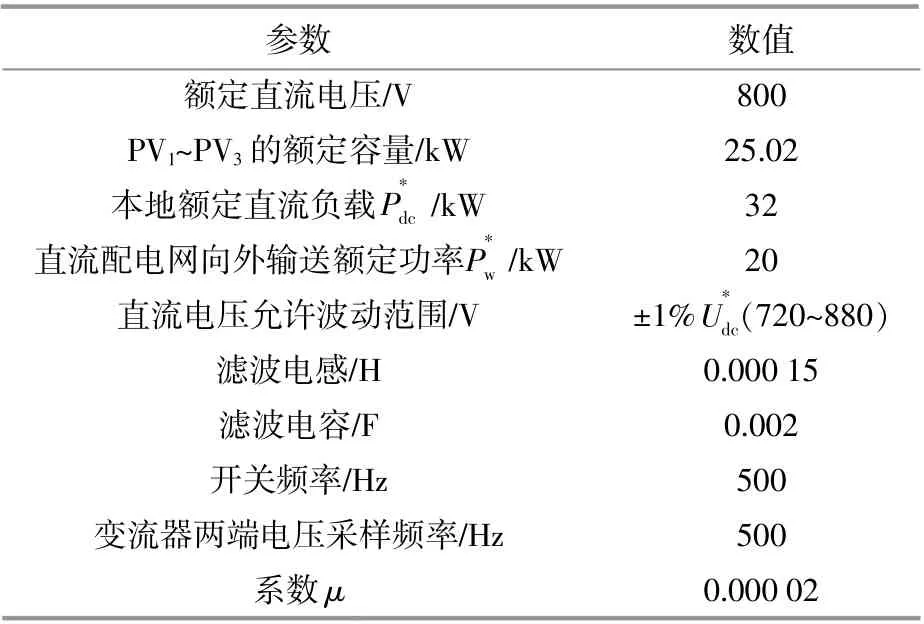
表1 系統主要參數Table1Main parameters of the system
設PV1~PV3的 環 境 溫 度 都 為25℃,PV1~PV3的 輻 照 度 分 別 為1300,1000,800W/m2。在 額 定負 載 狀 態 下,根 據 式(1)可 計 算 得 出PV1~PV3均 分輸出功率時,輸出電壓分別為178,173.5,167V。假設某時刻直流配電網向外輸送總功率由額定功率52kW變為60kW,輸入、輸出電壓同時跌落時間為0.1s,根據式(4),圖3計算出下垂系數變化,如表2所示。

表2 下垂系數變化情況Table2Variation of sag coefficient
根據式(12)得出下垂系數優化前、后3個光伏變流器輸出阻抗波特圖,如圖6所示。由圖6可知,考慮光伏輸出功率裕度的直流配電網自適應下垂控制減小了系統中所有光伏側變流器輸出阻抗幅值,由式(13)可知,Zbl也會隨之減小。采用本文所提自適應下垂控制將提高負載變化時系統的穩定性。
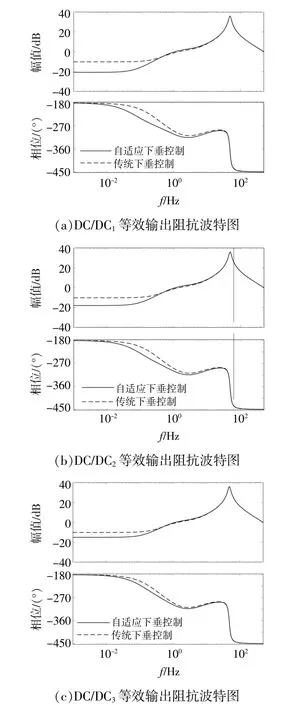
圖6 光伏側變流器等效輸出阻抗波特圖Fig.6 Equivalent output impedance bode diagram of photovoltaic side converter
4 仿真模型驗證及對比分析
基于Matlab/Simulink搭建圖1的直流配電網仿真模型,對本文所提考慮光伏輸出功率裕度的直流配電網自適應下垂控制可行性進行驗證。系統主要仿真參數見表1,PV1~PV3環境溫度均為25℃,輻 照 度 分 別 為1300,1000,800W/m2。
4.1 負載增加時仿真對比分析
在系統負載增加情況下,本文對采用考慮光伏輸出功率裕度的直流配電網自適應下垂控制、文 獻[12]所 提 改 進 下 垂 控 制 方 法、以 及 式(2),(3)傳統下垂控制方法進行對比。直流配電網向外輸送功率保持額定負載20kW,本地負載在1~2s為32kW,2~4s增 加 到37kW,4~6s增 加 到43 kW,6~8s恢 復32kW。
在3種控制方法下,直流母線電壓對比如圖7所示。
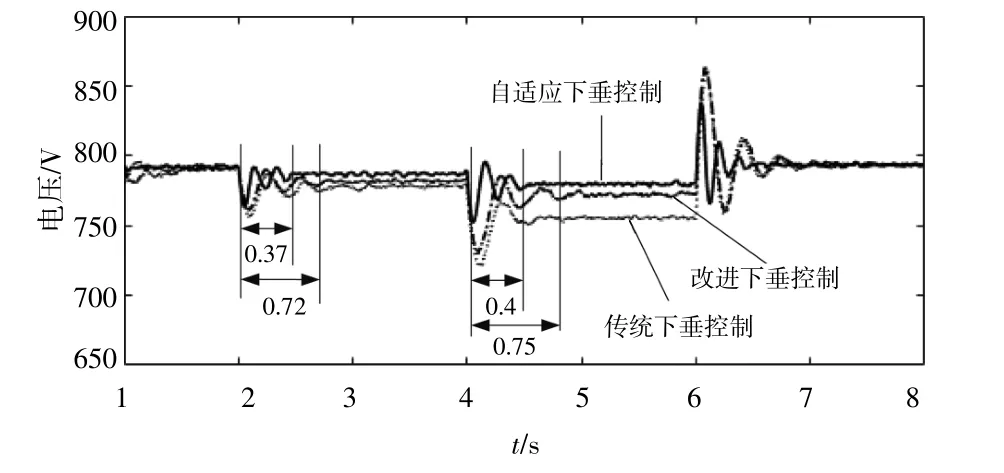
圖7 負荷增大情況下3種控制方法電壓對比Fig.7 Voltage comparison of three control methods in case of load increase
2~4s,系統中所有的DC/DC變流器均處于下垂控制狀態運行。4~6s,在采用本文所提自適應下垂控制方法中,3個DC/DC變流器均處于下垂控制運行模式;在采用改進下垂控制方法及傳統下垂控制方法運行的系統中,由于PV3功率裕度較小,因此DC/DC3變流器由下垂控制切換為MPPT控制,其余光伏繼續維持下垂控制。6~8s系統負荷恢復額定值,在采用本文所提自適應下垂控制方法運行的系統中,3個DC/DC變流器仍處于下垂控制運行模式;在采用改進下垂控制方法及傳統下垂控制方法運行的系統中,DC/DC3變流器由MPPT控制切換為下垂控制模式運行。由圖7可知,系統在4s和6s發生控制模式切換的時候,采用改進下垂控制方法及傳統下垂控制方法運行的系統母線電壓波動較大,本文所提自適應下垂控制維持了各變流器下垂控制運行,提高了系統在下垂控制模式下可以承受的功率波動范圍,減小了母線電壓的波動幅度。改進下垂控制方法及傳統下垂控制在負載變化時,電壓恢復穩定運行的時間分別約為0.72s和0.75s,本文所提自適應下垂控制在負載變化時,電壓恢復穩定運行的時間約為0.37s和0.4s,縮短了系統恢復穩定狀態的時間。并且,本文所提自適應下垂控制在減小系統重載狀態下穩定運行后母線電壓的偏差方面可以取得更好的效果。
3種控制方法輸出功率對比如圖8所示。
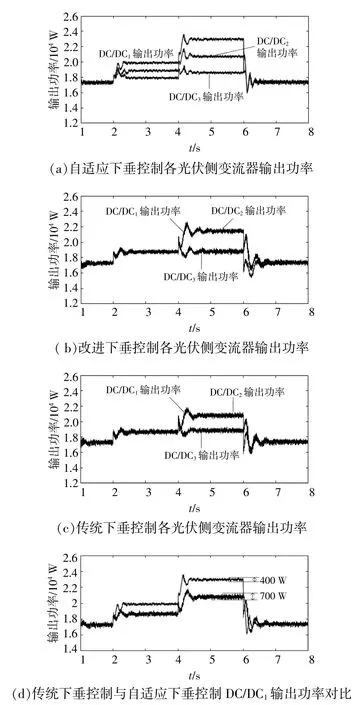
圖8 負荷增加情況下3種控制方法輸出功率對比Fig.8 Comparison of output power under three control methods under load increase
由圖8可知,本文所提自適應下垂控制在負載增大的情況下,輸出功率裕度大的光伏電源輸出功率較多,輸出功率裕度小的光伏電源輸出功率較少,而在其余兩種控制方法控制下,所有的光伏電源輸出相同的功率。由圖8(d)可知,本文所提自適應下垂控制在重載穩定運行狀態下,由于對下垂系數進行相應的改變,因此輸出功率波動幅度減小,提高了系統的穩定性。
4.2 負載減小時仿真對比分析
本直流配電網向外輸送功率保持額定負載20kW,本 地 負 載 在1~2s為32kW,2~4s減 小 到25kW,4~6s減 小 到18kW,6~8s恢 復32kW。3種控制方法直流母線電壓如圖9所示。
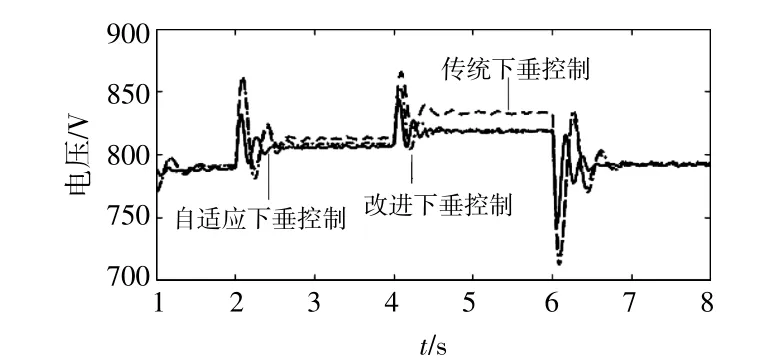
圖9 負荷減小情況下3種控制方法電壓對比Fig.9 Voltage comparison of three control methods under load reduction
由圖9可知,在負荷減小的情況下,本文所提自適應下垂控制減小了電壓的波動幅度,縮短了系統恢復穩定狀態的時間,增強了系統的穩定性。當負荷減小時,輕載狀態穩定運行后,本文所提自適應下垂控制在控制母線電壓的偏差方面,達到良好效果。
3種控制輸出功率對比如圖10所示。在系統負載減小時,本文所提自適應下垂控制使功率裕度小的光伏電源輸出更少的功率,而其余兩種控制使所有的光伏電源輸出相同的功率。本文所提自適應下垂控制功率達到穩定狀態的時間約為0.4s和0.38s,改進下垂控制方法功率達到穩定狀態的時間約為0.65s,傳統下垂控制方法達到穩定狀態的時間約為0.7s。因此,本文所提自適應下垂控制減小了系統在負載變化時,輸出功率達到穩定的時間。本文所提自適應下垂控制主要作用時間在2~6s,由于對下垂系數進行相應的改變,因此輸出功率波動幅度減小,系統的穩定性得到了提高。
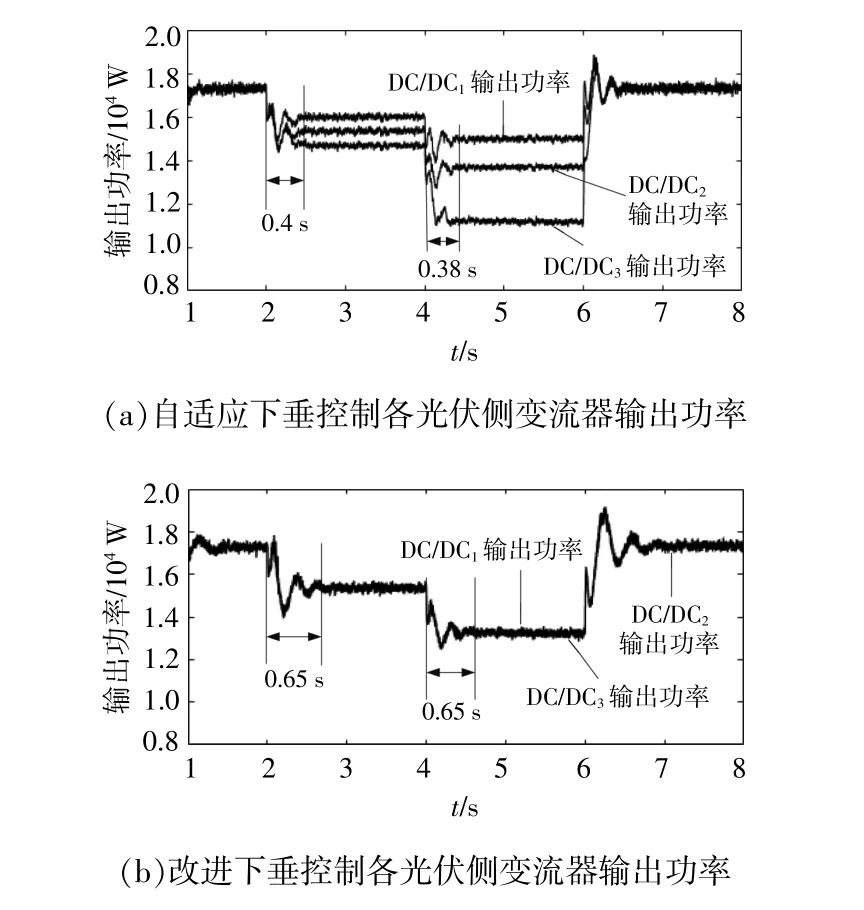
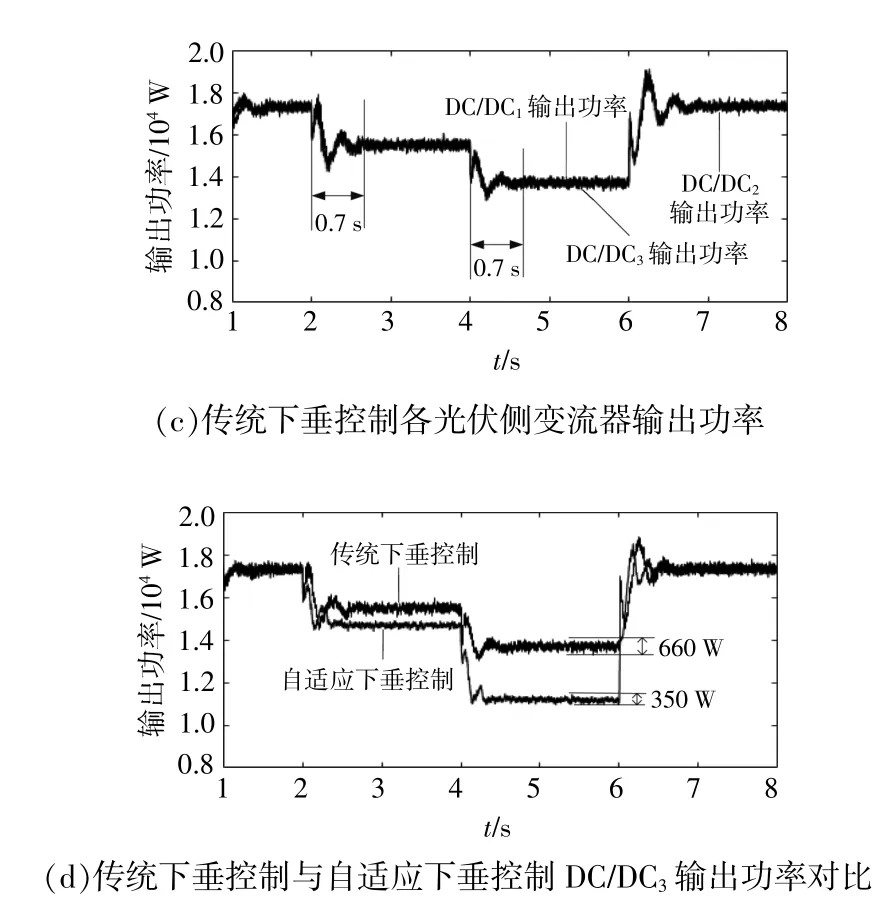
圖10 負荷減小情況下3種控制方法仿真輸出功率對比Fig.10 Comparison of output power under three control methods in case of load reduction
5 結論
多光伏并聯接入直流配電網系統在實際運行情況下,各光伏輸出功率裕度不同。本文在分析負載變化以及光伏輸出功率裕度變化對變流器兩端電壓影響的基礎上,提出了一種考慮光伏輸出功率裕度的直流配電網自適應下垂控制。對光伏側變流器輸出阻抗進行建模分析,理論分析及仿真驗證表明:①本文所提考慮光伏輸出功率裕度的直流配電網自適應下垂控制,在系統負荷增大時能控制功率裕度大的光伏電源發出更多的功率,在系統負荷減小時控制功率裕度小的光伏電源發出更少的功率;②本文所提自適應下垂控制方法可以提高多光伏并聯接入直流配電網系統的穩定性,減小了負載變化時直流母線電壓偏差,提高了系統下垂控制模式運行下承受的功率變化范圍,避免了系統因光伏功率裕度變化而產生的控制模式切換。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年32期)2018-11-30 01:43:16
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2016年23期)2016-05-17 03:54:05
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24