噴涂機械臂軌跡規劃控制系統設計
2022-09-08 04:18:08高清冉
今日自動化 2022年7期
劉 波,高清冉
(濟源職業技術學院,河南濟源 459000)
為了滿足各企業的實際應用需求,需要將軌跡規劃算法與實際生產的噴涂工藝相結合,實現對噴涂機械手的軌跡自動規劃控制。以前,噴涂機器人的軌跡都是根據現場工作人員的指導,設定參數,再進行最優的噴涂軌跡,而不同的外形和形狀的工件,則需要重新設計,這對提高效率是非常不利的。而且,重復而又繁瑣的工作,會讓工作人員更加疲憊。軌跡規劃控制系統能夠實現對噴涂機器人手臂的操作進行控制,能夠對噴漆的尺寸進行精確的控制,從而實現對復雜表面的噴涂,并實現了對工件噴涂過程的監測,實現了軌跡規劃與監測的綜合效應。該軌跡規劃控制系統能有效地減少傳統的手工指導作業,提高作業、管理的效率,保證作業的安全性。
1 體系結構
為了適應生產和使用的需要,本文對軌跡自動規劃控制系統進行了分析。機器人的軌跡自動規劃控制系統主要由兩個主要內容組成:工件的噴涂過程實時監測和離線噴涂軌跡的設計。在此基礎上,給出了噴涂機器人的自動軌跡規劃系統的結構。噴涂機器人手臂包括4臺噴涂底漆、6臺噴涂色漆、4臺噴涂清漆,共計14臺ABBIRB5400噴涂機械臂。離線噴涂軌跡設計是根據軌跡生成的,然后是工件三維模型的獲取、工件曲面的分析、噴涂軌跡的設計、噴涂線路的離線仿真。各功能模塊分別設計了相應的用戶界面,便于操作人員進行流程化的設計。根據通用化的方法,軟件分為兩個層面:接口層面和數據處理層面。
在C++語言和QT 架構的基礎上,開發了機械手噴涂軌跡自動規劃控制系統,見圖1。
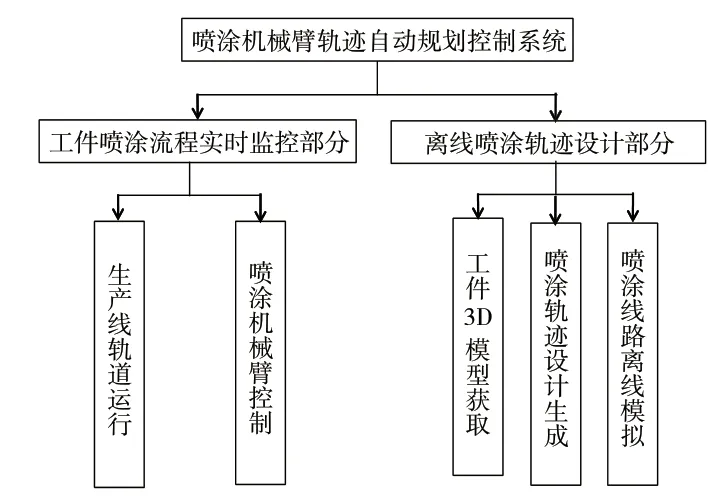
圖1 自動規劃噴槍機器人的軌道設計體系
2 噴涂過程監測
2.1 生產線軌跡運行監測
針對所要研究的目標,自動規劃噴涂機器人的軌跡規劃控制系統需要對工件的位置進行分析和監測。在噴涂工藝中,懸架的位置信息是一個非常關鍵的環節,它的位置和噴槍的位置以及噴涂過程中的位置信息都是由噴涂的軌跡信息來決定的。
該系統能實時、直觀地將噴涂過程的狀態呈現在顯示屏上,便于操作人員對被噴工件進行色彩轉換的準確掌握,并能有效地減少工作人員的往返操作,有效地防止了油漆噴涂過程中的有毒氣體泄漏,從而提高了作業效率。作業掛車的位置,直接關系到噴漆機械手能否正常工作。在圖2中顯示了監控過程。在此過程中,在工件掛車達到預定位置時,噴漆機器人就會開始工作。根據計劃的軌道進行操作。在進行噴漆作業時,掛車會減速、低速、勻速行駛。噴涂機器人根據參數設置的參數,進行了反饋控制,使噴涂機器人能夠與軌道配合工作。
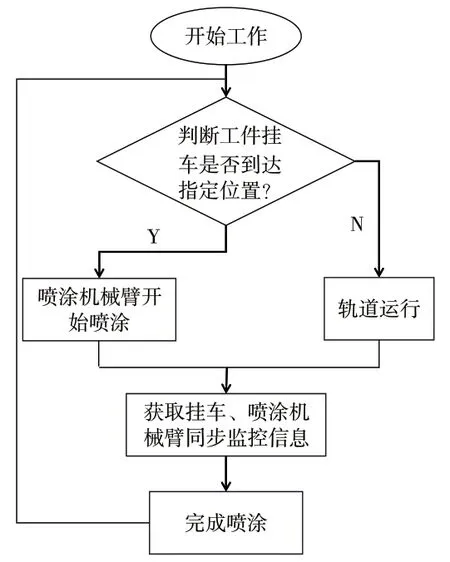
圖2 噴涂監測過程
圖3顯示了掛車地面軌道的操作控制原理,在掛車到達預定的位置時觸碰到了紅外線傳感器,向控制主部件發送信號。指令傳至CPU,由CPU 進行操作控制,噴涂機器人便會發出脈沖訊號至伺服驅動器。操作導軌與噴漆機械臂一起工作,電機轉速由轉速伺服運算來控制,然后由轉速反饋進行相關的反饋校正,使之達到穩定的輸出。
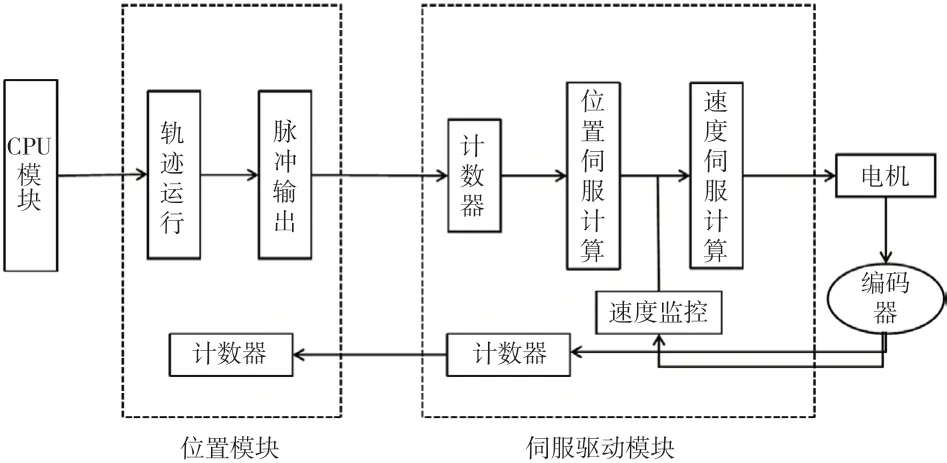
圖3 掛車地軌運行控制
2.2 噴涂機械手的操縱
本文采用ABB 公司的IRB5400噴涂機械臂作為研究對象。機器人的運動控制是西方國家最先提出的。20世紀70年代,斯坦福大學的機器人控制語言小組首先提出了WAVE 語言的概念,它是通過對運動和力量的分析,與人工智能方法相結合來實現的。
該系統可以利用離線程序進行編程,然后在計算機上對其進行仿真,經過模擬和優化后與CPU 相連。位置感應器對工件掛車的就位進行檢測,一旦發現,就進行噴漆。如果半成品掛車還沒有達到預定的地點,則繼續等待。圖4為噴涂控制流程。
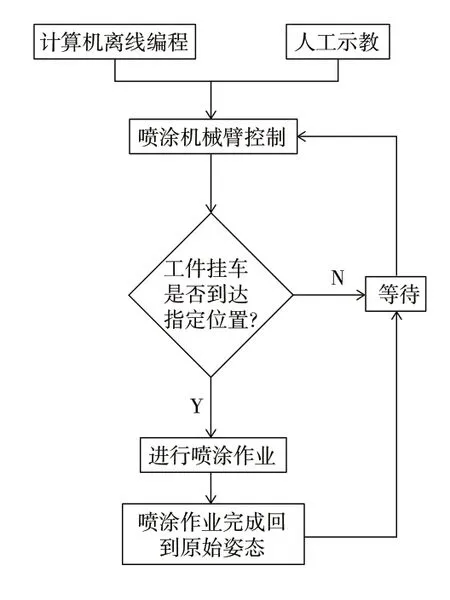
圖4 噴涂系統的流程
2.3 離線噴涂軌跡設計
離線噴涂軌跡設計主要由工件三維模型獲取、噴涂軌跡設計、離線模擬模擬三個方面構成。該系統利用QT 框架建立了噴涂軌跡圖形用戶界面,該界面是在Robot Studio機器人手臂控制軟件上進行二次開發,實現了工件的自動識別和軌跡規劃。
在QT 編程中,該軟件的圖形接口尺寸設定為1 920*1 080,能夠滿足普通計算機的要求。圖5中顯示了噴涂機器人的軌道規劃程序接口。其中,序號①是選擇噴涂機械手臂的設備,當前只能選擇IRB5400型噴涂機械手臂;序號②是工件3D 模型的導入,當前只能導入STL;序號③是軌道計劃的起始和隨后的軌道窗口;序號④是一個異常信號的反饋窗口;在整個信息列中,如果工件的識別有異常或軌道計劃的問題。序號⑤為柔性控制選項窗,包含了兩種抖動處理方法,分別是:力-位相混合控制和自適應控制。
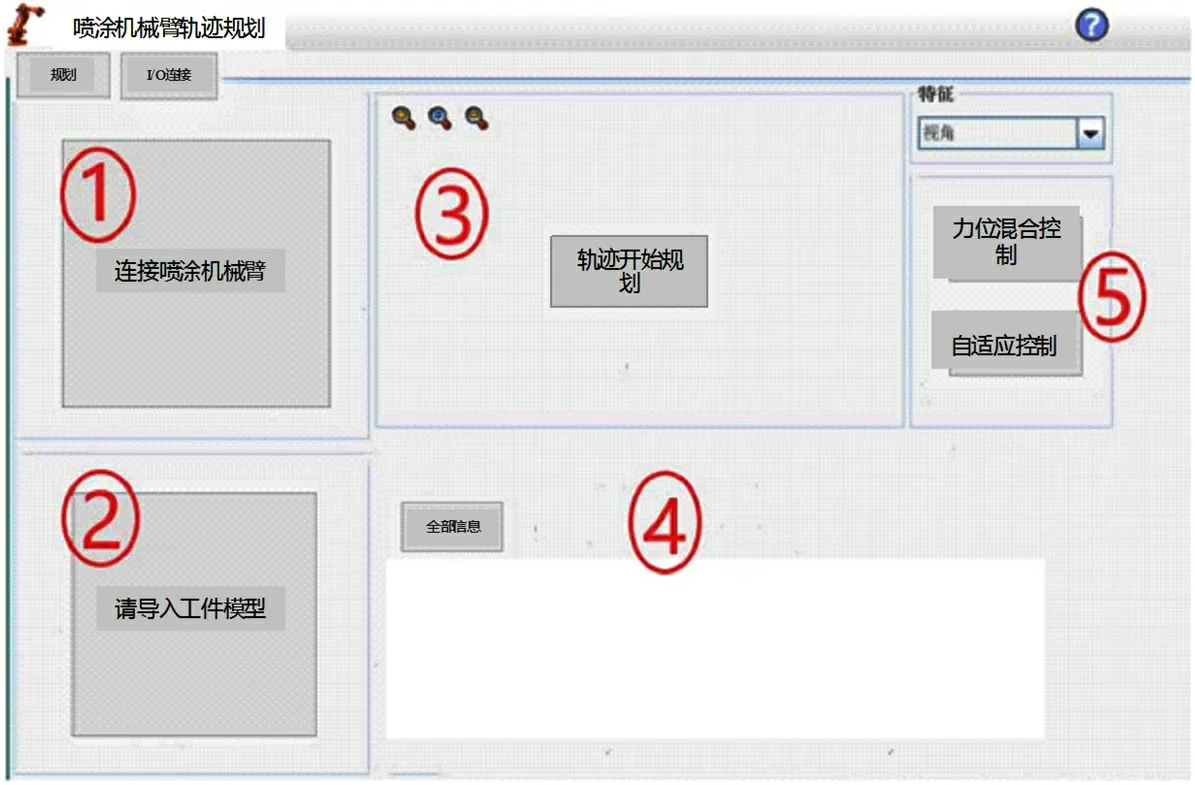
圖5 噴漆機器人的軌道規劃端口界面
2.4 工件三維建模
工件三維建模是實現工件軌跡規劃的首要環節,它可以將工件的三維模型直接引入到噴塑件模型中。GUI 接口呼叫Robot Studio 標識工件應用系統,具有相同的系統特性,同時也為以后的計劃提供了一個簡潔的計劃。在圖形用戶界面的左下角,利用QPush Button 組件產生導入按鈕,并將其與父類組件連接。
當前,只有在副接口中引入STL 格式的模型,才能對工件模型進行正確的識別。導入保險杠模型視窗,可清楚地顯示所導入的STL 格式保險杠模式,見圖6。

圖6 保險杠模型視窗
2.5 軌道生成單元
在整個軟件系統中,軌道產生模塊是一個非常關鍵的部分,它以這個為中心,展示窗口位于軟件的中部偏上。通過采集到的零件的參數,可以根據需要選擇合適的噴漆機器人。引入力位混合控制或自適應控制,并對運動軌跡進行了優化,降低了機械手的擺動。圖7中顯示了軌跡生成接口。

圖7 軌跡生成
利用五次多項式插值方法,在機器人Studio 工作站上建立GUI 接口連接系統模塊,然后通過Robot Studio 軟件實現對應的噴涂軌跡。
3 結論
設計了一種用于噴涂機器人的軌跡規劃控制系統。該系統主要分為兩個方面:流水線作業監測與離線作業跟蹤。在生產中,動態噴涂軌跡的設計與生產線的操作速度密切相關,其中的軌道規劃也包括在內。本系統基于Robot Studio 軟件的二次開發,采用QT 軟件開發了噴漆用戶界面。利用該系統對噴涂軌跡進行了優化,并將其用于工業噴涂軟件Shop Floor Editor 中,實現了噴涂過程的規劃和噴涂過程的仿真。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數學物理學報(2020年2期)2020-06-02 11:29:24
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
光學精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08
中國工程咨詢(2016年4期)2016-02-14 07:28:28