氣壓驅動仿生柔性機械臂的設計
2022-09-07 06:14:00于有河張釗萁
機電信息 2022年17期
于有河 李 建 周 燕 張釗萁
(北京工商大學,北京 100048)
0 引言
軟體機器人是從仿生學的角度,基于自然界中的生物,如大象、海星和章魚等設計出的一種具有連續變形結構和高自由度的新型機器人。機器人的本體通常是利用柔性材料制作,通常認為是楊氏模量低于人類肌肉的材料,一般有介電彈性體(DE)、離子聚合物金屬復合材料(IPMC)、形狀記憶合金(SMA)、形狀記憶聚合物(SMP)等。區別于傳統機器人電機驅動,軟體機器人的驅動方式主要取決于所使用的智能材料,根據響應的物理量暫時分為幾類:電場、壓力、磁場、光、溫度、化學反應。仿生機器人的設計與制作涉及材料學、力學等多種學科,同時還與3D打印技術、傳感技術及智能新型材料驅動等先進技術相結合,逐漸成為國內外機器人領域的研究熱點之一[1]。
本文模擬章魚觸手運動特點,設計了一款柔性機械臂。不同于常見軟體機器人采用柔性材料實現變形和多自由度,本設計采用多關節構造,不同關節間采用不同方向的鉸鏈布局,以此實現機械臂在不同方向的彎曲運動;多關節間的協調變形可以實現機械臂的伸縮運動。驅動部分采用電磁閥控制的氣缸,利用氣體的可壓縮性實現部分柔性。機械臂末端安裝柔性仿生機械爪,從而使其能夠實現物體的抓取。為了滿足氣動軟體機器人的靈活利用以及多場景工作的需求,將柔性機械臂安裝在電驅動小車上。
1 柔性機械臂結構設計與運動實現
1.1 機器人整體布局設計
本研究主要關注多自由度柔性機械臂和氣動手爪,為了擴大機械臂作業空間,其整體機構設計與分布如圖1所示。

圖1 機械臂整體結構示意
將其連接在一個移動平臺上,平臺為一遙控電動小車,本文不作具體介紹。柔性機械臂和移動平臺之間通過舵機和固定梁連接,氣動手爪固定于機械臂末端。
作為核心部件的機械臂共有6個關節,每個關節結構一致,串行連接。相鄰關節間有120°夾角。機械臂末端連接一氣動機械爪,用于抓取物體。獨立關節的結構如圖2所示。
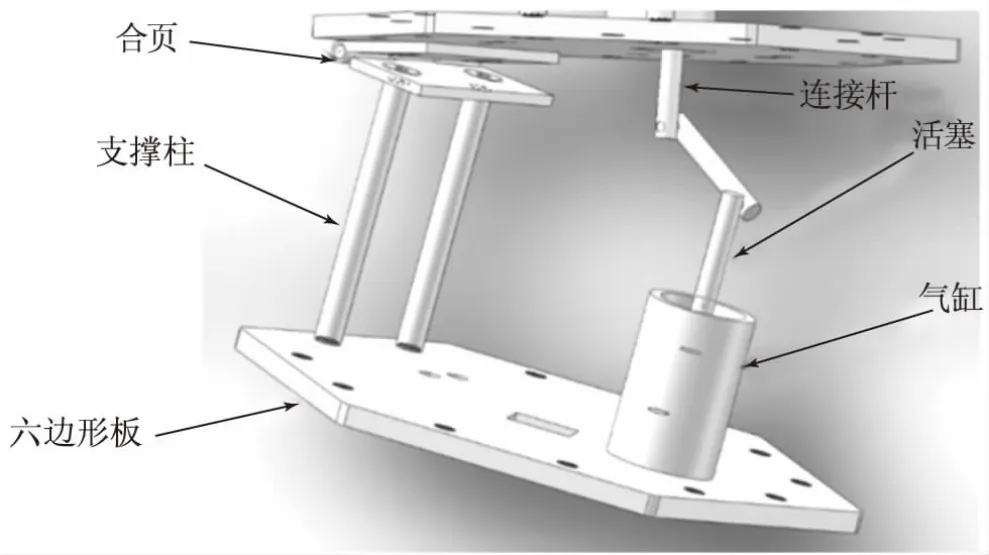
圖2 機械臂單個關節結構示意圖
1.2 彎曲運動實現
每個獨立關節均為旋轉關節,當氣缸內部充氣時,活塞伸長,使上層板繞合頁軸翻轉一定的角度,從而實現機械臂向特定方向彎曲。活塞行程越大,翻轉角度越大。由于各關節之間120°夾角放置,因此可實現多個方向彎曲運動。
當關節一氣缸伸長時,機械臂彎曲情況如圖3所示。其他關節彎曲情況類似。

圖3 機械臂關節一氣缸伸長時示意圖
1.3 伸縮運動實現
伸縮運動的實現是靠多個關節間的協調旋轉實現。機械臂共有6個獨立關節,相鄰關節成120°夾角,前3個關節與后3個關節間具有空間位置相似性。針對前3個關節(后3個關節類似),當它們相對各自轉軸做合適的轉動時,關節轉動會相互抵消,表現為空間直線運動,也就是機械臂的伸長(同時會有徑向偏移,偏移尺寸較小,在此忽略)。前3個關節各旋轉特定角度時,機械臂變形情況如圖4所示。

圖4 機械臂關節一、二、三伸長時示意圖
1.4 回轉關節設計
由于機械臂各獨立關節間夾角均為120°,只能朝向特定角度彎曲。為了實現機械臂多向彎曲運作,擴大作業空間,團隊為機械臂增加了回轉關節。設計將機械臂安裝在舵機上,舵機結構如圖5所示。通過89C51主控芯片控制舵機旋轉的角度和角速度,以此來實現對機械臂轉向的控制。回轉關節的設計,既增加了機械臂的自由度,又可以在某些情況下替代移動平臺的運動,完成搬運操作,大大提高了工作效率。
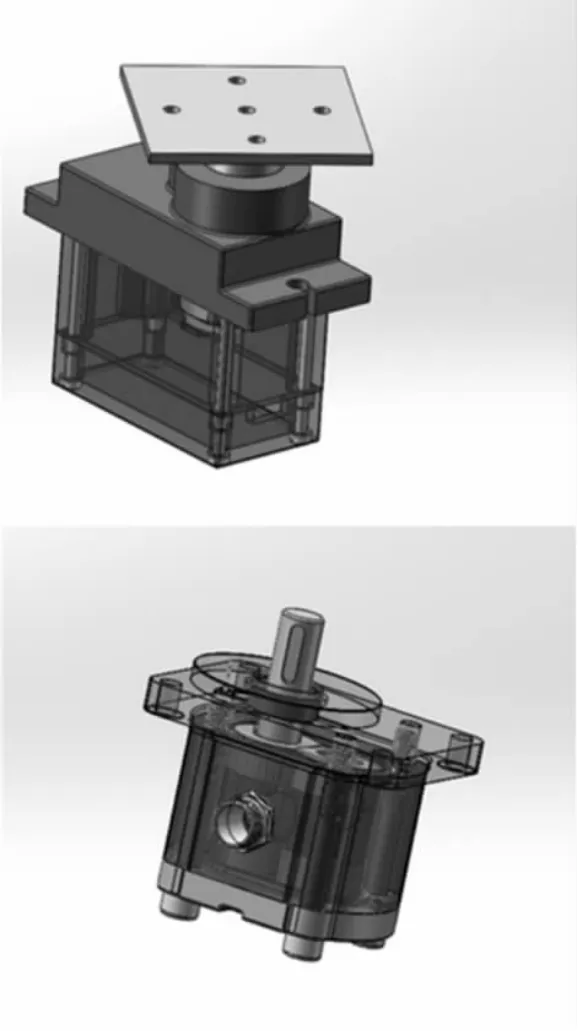
圖5 舵機結構圖
1.5 爪部設計
氣動五指機械爪主要是利用中間一系列的連桿鉸鏈配合,將小型氣缸的氣缸桿往復運動轉化為機械爪的抓取運動。當氣缸桿向外部伸長時,機械爪呈張開形式;當氣缸桿向內收縮時,機械爪呈抓握形式。機械爪的抓取角度取決于氣缸桿的伸縮長度,圖6展示了機械爪放松與抓取時的狀態。

圖6 氣動機械爪兩種狀態
2 柔性機械臂驅動設計
2.1 常用驅動方式比較
2.1.1 電機驅動方式
電機驅動是利用各種電機產生的力或轉矩直接驅動關節,或者通過諸如減速的機構來驅動機器人的關節,以完成所需的位置、速度、加速度或其他指標。該方式具有環保、整潔、控制方便、運動精度高、維護成本低和驅動效率高的優點。使用的電機有4種類型:步進電機、直流伺服電機、交流伺服電機和線性電機。
2.1.2 液壓驅動方式
液壓驅動器使用液體作為介質來傳遞力,并使用液壓泵使液壓系統產生的壓力來驅動執行器運動。液壓驅動模式是成熟的驅動模式,它具有易于控制的壓力和流量、高剛性、不可壓縮的液壓油、簡單穩定的調速、方便的操作和控制以及廣泛的無級調速(調速范圍高達2000:1)等特點,并且使用較小的驅動力或扭矩便可獲得更大的動力。然而,由于流體流動阻力、溫度變化、雜質、泄漏等的影響,工件的穩定性和定位精度不準確,并且還會造成環境污染,增加了維護技術要求。因此,該方式經常用于需要較大輸出力和低運動速度的場合。在電驅動技術成熟之前,液壓驅動是使用最廣泛的驅動方法[2]。
2.1.3 氣動驅動方式
氣動驅動器使用空氣作為工作介質,并使用氣源發生器將壓縮空氣的壓力能轉換為機械能,以驅動執行器完成預定的運動。氣動驅動具有節能簡單、時間短、動作快、柔軟、重量輕、產量/質量比高、安裝維護方便、安全、成本低、對環境無污染的優點。然而,由于空氣的可壓縮性,要實現高精度、快速響應的位置和速度控制并不容易,而且還會降低驅動系統的剛性。
2.2 彎曲與伸縮關節的驅動
近年來,人們已經利用氣動驅動的靈活性來開發在康復、護理和協助方面與人類協作的機器人[3]。本文研究設計的仿生柔性機械臂要求結構簡單緊湊、便于攜帶、易于拆卸,且對位置和速度精度要求較高。綜合以上3種驅動方式的優缺點,結合仿生柔性機械臂的實際情況,本研究選擇氣動驅動方式。驅動部分主要構成包括氣泵、管路、氣缸與電磁閥。
氣泵,即“空氣泵”,從一個封閉空間排除空氣或從封閉空間添加空氣的一種裝置。氣泵種類繁多,而本設計只需采用微型氣泵即可滿足要求。微型氣泵是指體積小巧,工作介質為氣態,主要用于氣體采樣、氣體循環、真空吸附、真空保壓、抽氣、打氣、增壓等的氣體輸送裝置[4]。微型氣泵的優點:體積小巧、噪聲小、功耗小、易于操作、便于攜帶、免維護、可24 h連續運轉,還允許介質富含水汽。最重要的是,微型氣泵是干式、無油的,無須真空泵油或潤滑油,所以不會污染工作介質,不會干擾對介質的分析,而且價格相對便宜得多。
為了使結構在抓取重物或受自身重力的影響時不會發生形變、能夠恢復原狀,需要結構之間是剛性連接,同時驅動部分也要滿足在抓取物體時能夠使結構彎曲伸縮到達指定位置,在抓取物體后能夠使變形部分通過驅動部分恢復原狀。因此,設置氣缸為驅動部分,當抓取物體時,進氣口打開,出氣口封閉,由于氣缸內部氣壓比氣缸外部氣壓大,活塞向上運動。當恢復原狀時,進氣口封閉,出氣口打開,活塞由于氣缸外部氣壓大于氣缸內部氣壓而使活塞向下運動。
電磁閥選用兩位三通先導式電磁閥。將氣泵通過氣管與電磁閥連接,再將電磁閥通過氣管與氣缸連接。使用控制開關實現氣泵和電磁閥的啟動與停止,當開關打開時,氣泵啟動,電磁閥導通。機械臂每節由單獨的氣缸控制,每個電磁閥分別由一個開關控制,通過氣缸活塞的運動使機械臂張開以實現彎曲,彎曲角度的大小取決于兩個活塞向上運動的行程。氣缸在機械臂上呈螺旋式每節相隔120°排列從而實現多角度彎曲。氣管分布在機械臂周圍,以便于機械臂靈活運動。機械臂頭部裝有一個氣動手爪,當機械臂到達被抓取物體附近時,氣動手爪張開,抓取物體,通過氣缸活塞的運動、舵機的旋轉,使機械臂運動到所要求的位置,然后氣動手爪打開,將物體放在相應位置處。
2.3 回轉關節驅動
電機種類繁多,本設計用了較為常見的兩種電機進行對比分析,并結合實際情況選出最佳方案。
直流電機是依靠直流工作電壓運行的電機,廣泛應用于收錄機、錄像機、影碟機、自動剃須刀、電吹風、電子表、玩具等。直流電機具有調速性能好、啟動容易、能夠載重啟動等優點,所以目前直流電機的應用仍然很廣泛,尤其是在可控硅直流電源出現以后。
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元件。在非超載的情況下,電機的轉速、停止位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。步進電機主要應用在數控機床制造領域,由于步進電機能夠直接將數字脈沖信號轉化為角位移,所以是理想的執行元件。
根據本次設計的要求,采用兩相交流86 mm步進電機。
3 結論與展望
本文介紹了一種氣動仿生柔性機械臂的設計,主體機械臂結構采用多關節構造,不同關節間采用不同方向的鉸鏈布局,以此實現機械臂在不同方向的彎曲運動;多關節間的協調變形可以實現機械臂的伸縮運動。驅動部分采用電磁閥控制的氣缸,利用氣體的可壓縮性實現部分柔性。機械臂末端安裝氣動機械手爪,從而使其能夠實現物體的安全抓取。本設計雖然能夠實現預期運動,但設計精度及自動化程度不高,下一步研究將集中在這兩個方面。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
現代裝飾(2020年7期)2020-07-27 01:27:42
當代工人(2020年8期)2020-05-25 09:07:38
流行色(2020年1期)2020-04-28 11:16:38
電腦報(2019年40期)2019-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09