鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手移動(dòng)控制方法
2022-09-07 08:48:28王新平王永剛王子浩
鐵道機(jī)車(chē)車(chē)輛 2022年4期
王新平,王永剛,王子浩
(1 國(guó)家能源投資集團(tuán)有限責(zé)任公司, 北京 100011;2 北京鐵科合力科技有限責(zé)任公司, 北京 100082)
在鐵路貨車(chē)檢修過(guò)程中,制動(dòng)梁自動(dòng)組裝具有較高的難度,組裝間隙較小、滑槽方向、構(gòu)架姿態(tài)的不確定都對(duì)組裝過(guò)程中的移動(dòng)控制精度與柔性提出了很高的要求。將機(jī)械手應(yīng)用于鐵路貨車(chē)制動(dòng)梁組裝環(huán)節(jié)中,可自主判斷鐵路貨車(chē)制動(dòng)梁的組裝位置和姿態(tài),通過(guò)控制機(jī)械手移動(dòng)實(shí)現(xiàn)鐵路貨車(chē)制動(dòng)梁組裝[1]。因此,機(jī)械手移動(dòng)控制的性能對(duì)于鐵路貨車(chē)制動(dòng)梁組裝具有重要意義。
楊雨佳[2]等人在研究機(jī)械手控制方法過(guò)程中采用仿生群智能優(yōu)化RBF 神經(jīng)網(wǎng)絡(luò),通過(guò)RBF 神經(jīng)網(wǎng)絡(luò)權(quán)重和閾值的尋優(yōu)構(gòu)建最優(yōu)機(jī)械手控制模型。崔雅博[3]等人在研究機(jī)械手控制過(guò)程中引入自適應(yīng)模糊反演算法,依據(jù)機(jī)械手動(dòng)態(tài)方程設(shè)計(jì)控制律,實(shí)現(xiàn)機(jī)械手移動(dòng)控制。但上述方法在控制過(guò)程中的控制方式過(guò)于單一,在鐵路貨車(chē)制動(dòng)梁組裝多變的需求與環(huán)境中并不適用。
針對(duì)上述問(wèn)題,文中研究了一種鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手移動(dòng)控制方法,針對(duì)鐵路貨車(chē)制動(dòng)梁組裝多變的需求與環(huán)境,將模糊控制系統(tǒng)和PID 數(shù)字控制器結(jié)合在一起,提出模糊PID 融合控制方法,針對(duì)不同的實(shí)際情況,選取不同的控制主導(dǎo)方法。
1 方法設(shè)計(jì)
1.1 構(gòu)建鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手控制模型
鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手的移動(dòng)控制是通過(guò)將伺服電機(jī)設(shè)備與控制單元相連實(shí)現(xiàn)的[4]。因此,本研究在構(gòu)建鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手結(jié)構(gòu)模型后,對(duì)其進(jìn)行分析,并確定機(jī)械手移動(dòng)控制相關(guān)參數(shù)的定性范圍。組裝機(jī)械手模型結(jié)構(gòu)如圖1 所示。

圖1 組裝機(jī)械手模型結(jié)構(gòu)圖
針對(duì)模型中的伺服電機(jī)控制機(jī)構(gòu),描述鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手電樞回路的電壓平衡方程為式(1):
式中:U、U′分別為輸入電壓、反電動(dòng)勢(shì);L、R分別為電樞電感、電阻;I、β分別為回路電流、電機(jī)轉(zhuǎn)角。
電流是影響鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手電機(jī)力矩的主要因素[5],參考電機(jī)電樞力矩相關(guān)性得到式(2):

式中:D、Z分別為鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手電機(jī)電磁轉(zhuǎn)矩、阻尼系數(shù);K、G分別為轉(zhuǎn)矩常數(shù)、轉(zhuǎn)動(dòng)慣量;q、l分別為組裝機(jī)械手阻尼、等效到電機(jī)軸上的轉(zhuǎn)動(dòng)力矩。
在鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手控制過(guò)程中,將采集碼盤(pán)返回的信號(hào)作為反饋[6],對(duì)機(jī)械手的移動(dòng)過(guò)程實(shí)施閉環(huán)控制,對(duì)上述2 個(gè)公式實(shí)施拉氏變換處理得到式(3):

式中:k為反饋比例控制系數(shù)。
在此基礎(chǔ)上,分析q對(duì)U和l的傳遞函數(shù)穩(wěn)定性,得到U和l的閉環(huán)特征方程,表達(dá)式為式(4):

依照Hurwitz 穩(wěn)定判據(jù)得到式(5):

式中:W1、W2分別為鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手移動(dòng)控制相關(guān)參數(shù);a為無(wú)理數(shù)。
依照鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手手冊(cè)確定相關(guān)常數(shù)[7],計(jì)算k值大于0,由此能夠說(shuō)明鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手移動(dòng)控制過(guò)程中,為確保控制過(guò)程的穩(wěn)定性需確保k值大于0。
1.2 機(jī)械手模糊PID 融合控制過(guò)程設(shè)計(jì)
針對(duì)模型中的伺服電機(jī)控制機(jī)構(gòu),本研究利用模糊PID 融合控制對(duì)其實(shí)施控制。
模糊PID 控制過(guò)程既具有基礎(chǔ)PID 控制過(guò)程高魯棒性的優(yōu)點(diǎn),其控制自學(xué)習(xí)更強(qiáng)。作為一種具有優(yōu)秀控制性能且易于實(shí)現(xiàn)的控制方法,由比例、積分與微分項(xiàng)3 個(gè)參數(shù)共同組成的PID 控制器被廣泛應(yīng)用于工業(yè)控制系統(tǒng)[8-9],通過(guò)確定合適的參數(shù)能夠提升控制效果。
在模糊PID 控制之前,需要確定PID 控制過(guò)程的3 項(xiàng)參數(shù),依次為比例參數(shù)?p、積分作用參數(shù)?i以及微分作用參數(shù)?d。在模糊PID 控制過(guò)程中,還涉及到加權(quán)因子?e與控制偏差e。跟蹤觀察?e和e的變化態(tài)勢(shì),根據(jù)觀察結(jié)果調(diào)試3 項(xiàng)參數(shù),可使被控的組裝機(jī)械手動(dòng)靜態(tài)性能達(dá)到更好狀態(tài)。
在本研究中,將加權(quán)因子?e與控制偏差e作為模糊控制器的輸入信息,以?p、?i和?d為輸出項(xiàng),構(gòu)建基于模糊PID 融合方法的鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手移動(dòng)控制方法結(jié)構(gòu)如圖2 所示。

圖2 模糊PID 控制結(jié)構(gòu)圖
在基于模糊PID 的鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手移動(dòng)控制過(guò)程中,最為關(guān)鍵的就是設(shè)定調(diào)節(jié)加權(quán)因子?e,針對(duì)鐵路貨車(chē)制動(dòng)梁組裝多變的需求與環(huán)境,在偏差|e|較大和較小的條件下,控制過(guò)程分別以模糊控制系統(tǒng)和PID 數(shù)字控制器為主導(dǎo)[10]。
基于模糊PID 融合方法的鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手移動(dòng)控制中,控制輸出過(guò)程以鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手移動(dòng)控制相關(guān)參數(shù)的定性范圍為約束,由模糊控制系統(tǒng)輸出與PID 控制輸出融合所得式(6):

式中:cf、cP分別為模糊控制輸出、PID 控制輸出。
依照偏差|e|的值調(diào)節(jié)?e值,以此為基礎(chǔ)優(yōu)化模糊控制系統(tǒng)與PID 控制器的加權(quán)系數(shù),從而調(diào)節(jié)組裝機(jī)械手移動(dòng)量。偏差|e|和加權(quán)因子?e的相關(guān)性見(jiàn)表1。
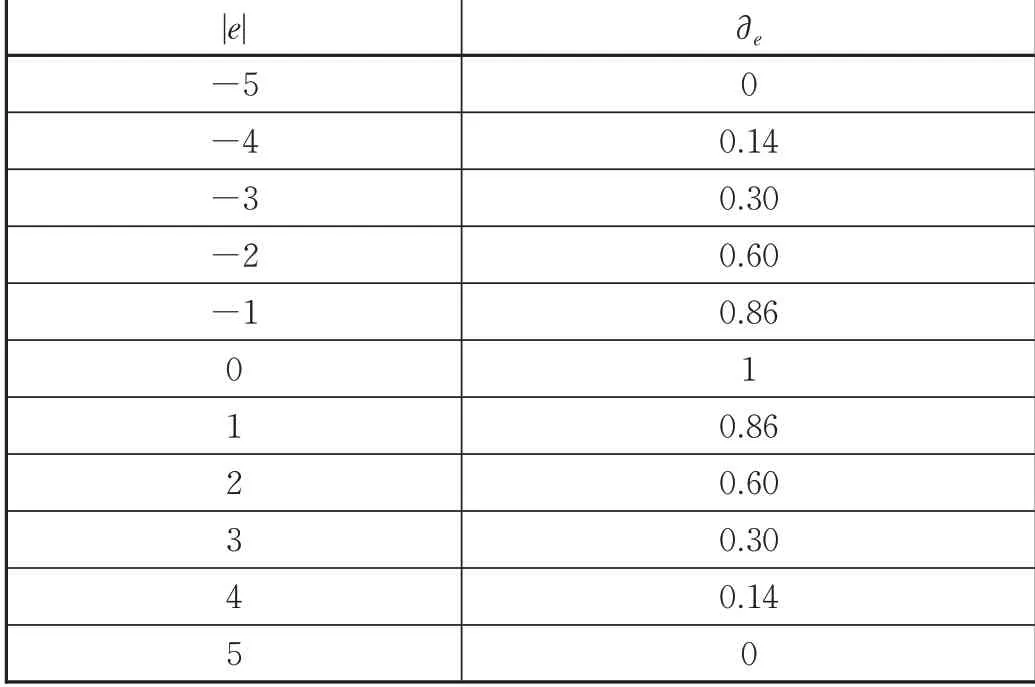
表1 |e|和?e 間 的相關(guān)性
PID 控制微分方程為式(7):

式 中:hp、hi、hd分 別 為 比 例 系 數(shù)、積 分 系數(shù)、微 分系數(shù)。
利用e(t)表示模糊PID 控制器輸出的誤差,描述誤差積分性能評(píng)價(jià)函數(shù)為式(8):

利用誤差積分性能指標(biāo)分析模糊PID 控制器的誤差函數(shù)[11],在PID 控制器設(shè)置參數(shù)最優(yōu)的條件下,令誤差函數(shù)達(dá)到下限,由此能夠提升PID 控制器的輸出精度,從而提高對(duì)組裝機(jī)械手的控制精度。
1.3 基于粒子群優(yōu)化控制過(guò)程
作為一種進(jìn)化算法,粒子群算法以隨機(jī)解為初始,通過(guò)對(duì)初始化時(shí)產(chǎn)生的隨機(jī)解進(jìn)行迭代尋優(yōu)而實(shí)現(xiàn)的。該算法認(rèn)為每個(gè)個(gè)體粒子都有一個(gè)位置適應(yīng)值,將該粒子截止到某時(shí)刻的最好位置視為個(gè)體最優(yōu),將粒子群體的最好位置視為全局最優(yōu)。將其應(yīng)用于PID 控制器參數(shù)尋優(yōu)中,粒子經(jīng)由搜索個(gè)體極值Pt和群體極值Gt,迭代更新自身速度V與位置X。迭代方程式為式(9):

式中:w、fn(n=1,2)、rn(n=1,2)分別為慣性權(quán)重、速度更新參數(shù)、隨機(jī)數(shù)。
在粒子迭代次數(shù)逐漸提升的條件下,不同粒子將產(chǎn)生較為類似的狀態(tài),由此令算法陷入局部最優(yōu)解狀態(tài)[12]。因此,以最大化體現(xiàn)局部搜索與全局搜索的性能優(yōu)勢(shì)為目的[13],修正模糊PID 控制過(guò)程中的加權(quán)因子?e的權(quán)重,過(guò)程為式(10):

式中:w0、o分別為加權(quán)因子?e的初始權(quán)重、當(dāng)前迭代次數(shù);w1、O分別為迭代次數(shù)上限條件下的權(quán)重系數(shù)、迭代次數(shù)上限。利用上述過(guò)程實(shí)現(xiàn)對(duì)模糊PID 控制過(guò)程的優(yōu)化處理,通過(guò)不間斷的移動(dòng)控制和數(shù)據(jù)反饋完成對(duì)鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手的智能控制。
2 試驗(yàn)結(jié)果與分析
為驗(yàn)證鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手移動(dòng)控制方法的實(shí)際應(yīng)用效果,設(shè)計(jì)如下試驗(yàn)。
試驗(yàn)對(duì)象的整體結(jié)構(gòu)如圖3 所示。

圖3 試驗(yàn)對(duì)象整體結(jié)構(gòu)
將文中方法應(yīng)用于試驗(yàn)對(duì)象內(nèi),利用文中方法實(shí)現(xiàn)試驗(yàn)對(duì)象移動(dòng)控制。試驗(yàn)對(duì)象機(jī)械手作業(yè)半徑與負(fù)載分別為2 500 mm 和130 kg,制動(dòng)梁質(zhì)量約為75 kg。
2.1 移動(dòng)控制測(cè)試
為驗(yàn)證文中方法的移動(dòng)控制性能,在無(wú)波形干擾條件下與有波形干擾條件下,分別從選取階躍波形與正弦波形2 方面出發(fā),驗(yàn)證文中方法的控制性能。
2.1.1 無(wú)波形干擾條件
外界環(huán)境無(wú)波形干擾條件下,文中方法的移動(dòng)控制效果如圖4 所示。
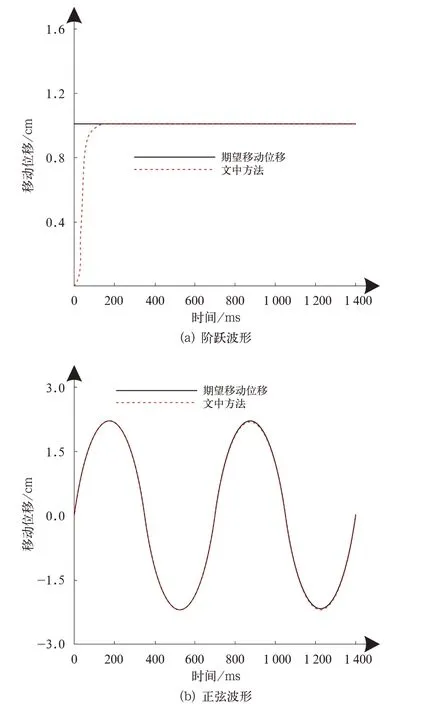
圖4 無(wú)波形干擾條件下移動(dòng)控制結(jié)果
分析圖4 可知,在無(wú)外界干擾環(huán)境下,試驗(yàn)對(duì)象移動(dòng)位移為階躍波形時(shí),采用文中方法能夠較快地實(shí)現(xiàn)移動(dòng)控制,且移動(dòng)控制路線與期望移動(dòng)位移結(jié)果基本一致;試驗(yàn)對(duì)象移動(dòng)位移為正弦波形時(shí),采用文中方法同樣能夠較快地實(shí)現(xiàn)移動(dòng)控制,且移動(dòng)控制路線與期望移動(dòng)位移結(jié)果基本一致。以上結(jié)果充分說(shuō)明文中方法在無(wú)波形干擾條件下能快速、準(zhǔn)確地進(jìn)行試驗(yàn)對(duì)象移動(dòng)控制。
2.1.2 有波形干擾條件
外界環(huán)境存在正弦波形干擾條件下,文中方法的移動(dòng)控制結(jié)果如圖5 所示。

圖5 有波形干擾條件下移動(dòng)控制結(jié)果
分析圖5 能夠得到,在外界環(huán)境存在正弦波形干擾的情況下,試驗(yàn)對(duì)象移動(dòng)位移為階躍波形時(shí),采用文中方法能夠在100 ms 左右實(shí)現(xiàn)有效地移動(dòng)控制,移動(dòng)控制路線與期望移動(dòng)位移結(jié)果差異并不顯著;試驗(yàn)對(duì)象移動(dòng)位移為正弦波形時(shí),采用文中方法同樣能夠較快地實(shí)現(xiàn)移動(dòng)控制,且移動(dòng)控制路線與期望移動(dòng)位移結(jié)果差異并不顯著。由此能夠說(shuō)明文中方法在外界有波形干擾條件下也可準(zhǔn)確實(shí)現(xiàn)試驗(yàn)對(duì)象移動(dòng)控制。
結(jié)合2.1.1 與2.1.2 試驗(yàn)結(jié)果能夠得到文中方法移動(dòng)控制反應(yīng)速度較快,且移動(dòng)控制量輸出結(jié)果具有較高精度。
2.2 移動(dòng)控制性能對(duì)比
為進(jìn)一步驗(yàn)證文中方法的控制性能,以文獻(xiàn)[2]中基于仿生群智能優(yōu)化RBF 神經(jīng)網(wǎng)絡(luò)的控制方法和文獻(xiàn)[3]中基于自適應(yīng)模糊反演算法的控制方法為對(duì)比方法,分析試驗(yàn)對(duì)象不同移動(dòng)目標(biāo)點(diǎn)條件下,各關(guān)節(jié)的移動(dòng)控制結(jié)果,所得結(jié)果見(jiàn)表2。
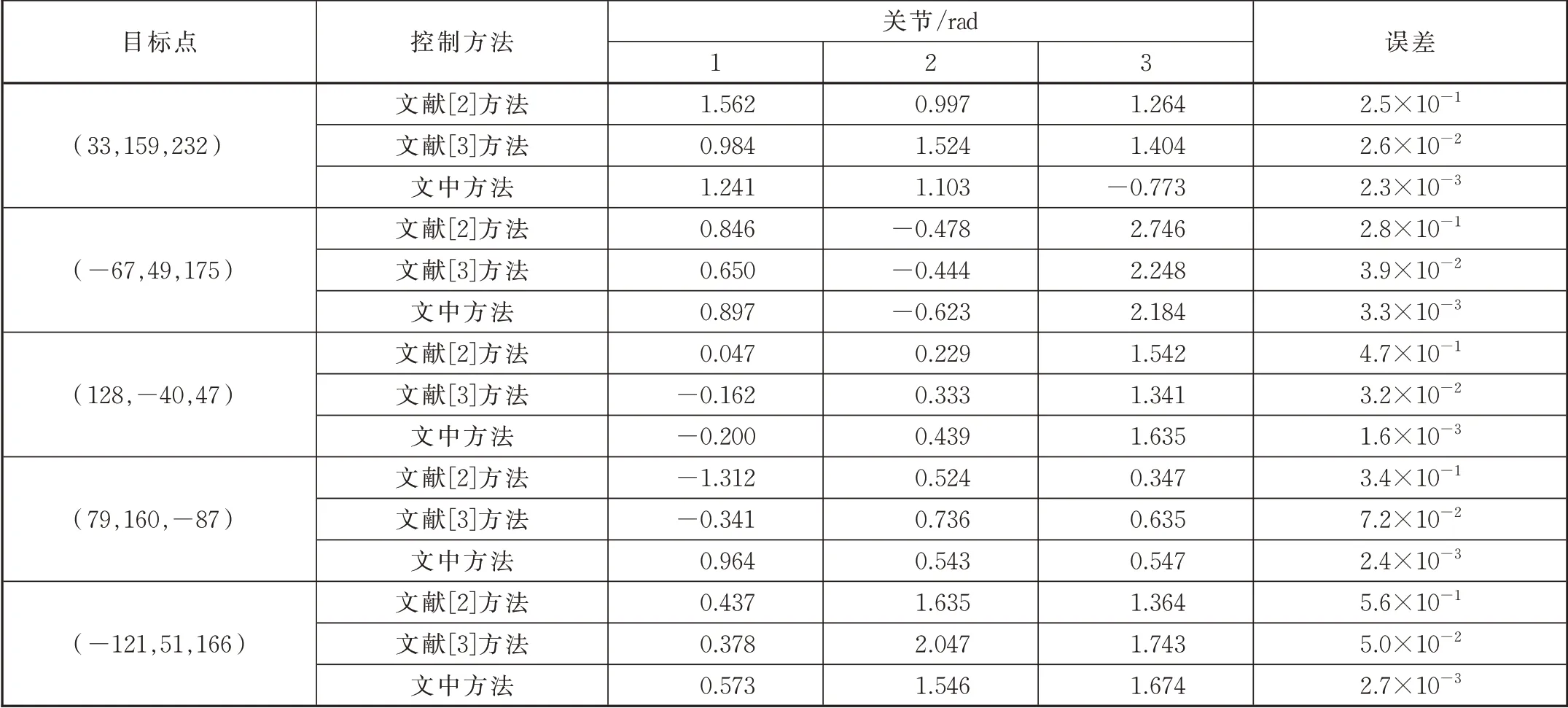
表2 不同控制方法控制結(jié)果對(duì)比
分析表2 能夠得到,采用文中方法對(duì)試驗(yàn)對(duì)象進(jìn)行移動(dòng)控制,在控制精度方面顯著優(yōu)于2 種對(duì)比方法,由此說(shuō)明文中方法具有更高的可應(yīng)用性。
3 結(jié) 論
文中研究鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手移動(dòng)控制方法,將模糊控制系統(tǒng)與PID 控制器相結(jié)合,通過(guò)模糊PID 融合控制方法實(shí)現(xiàn)鐵路貨車(chē)制動(dòng)梁組裝機(jī)械手移動(dòng)控制。試驗(yàn)結(jié)果顯示文中方法在不同情況下均可具備快速、準(zhǔn)確地控制性能,具有更高的可應(yīng)用性。文中方法的研究主要針對(duì)PID 控制器的控制,在后續(xù)研究過(guò)程中將針對(duì)模糊控制系統(tǒng)實(shí)施深度研究,提升文中方法應(yīng)用性能。
猜你喜歡
天天愛(ài)科學(xué)·科學(xué)啟蒙(2025年3期)2025-03-27 00:00:00
云南畫(huà)報(bào)(2021年12期)2021-03-08 00:50:54
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
鐵道通信信號(hào)(2018年7期)2018-08-29 01:17:04
通信電源技術(shù)(2016年4期)2016-04-04 02:58:04
Coco薇(2016年2期)2016-03-22 02:42:52
工程建設(shè)與設(shè)計(jì)(2016年3期)2016-02-27 10:50:46
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
中國(guó)火炬(2015年7期)2015-07-31 17:40:05