基于無人機傾斜攝影測量系統的線性工程測量應用研究
2022-09-07 08:11:12張梁杰
資源導刊(信息化測繪) 2022年7期
張梁杰
(浙江納智土地勘測規劃設計有限公司,浙江 杭州 311400)
1 引言
為提升經濟活力,我國持續加大了交通、水利、電力、燃氣管線等基礎設施的投資力度,這些工程具有跨度長、規模大、總體呈線性分布等特征[1]。測量作為線性工程最基礎的工作,為線性工程的勘測設計、施工安裝以及運營管理提供了重要的數據圖件和技術支撐[2]。
由于線性工程特殊的地形條件,常規的線性工程測量手段通常存在工期長、勞動強度大、精度低、成本高等弊端。基于無人機平臺的傾斜攝影測量技術的廣泛應用,突破了傳統垂直攝影測量方法的技術瓶頸,通過掛載多鏡頭傳感器可以快速獲取到地面多角度的高分辨率影像數據,可以快速生成高精度三維實景模型,省去了過多的外業測量流程,提高了數據生產的效率與質量,為線性工程測量提供了一套嶄新的解決方案。
2 無人機傾斜攝影測量系統簡介
2.1 無人機平臺
隨著無人機與數碼相機技術的不斷發展,基于無人機平臺的數字航攝技術已顯示出其獨特的優勢,無人機與航空攝影測量相結合,使得“無人機數字低空遙感”成為航空遙感領域的一個嶄新發展方向。無人機航拍可應用于國家重大工程建設、災害應急與處理、國土監察、資源開發、新農村和小城鎮建設等方面,尤其在基礎測繪、土地資源調查監測、土地利用動態監測、數字城市建設和應急救災測繪數據獲取等方面,已經得到廣泛的應用。
2.2 傾斜攝影測量
攝影測量技術在新時代測繪工作中應用十分廣泛,通過該技術可以更高效、精確地獲取地理信息要素。但是,隨著人們對精度要求的不斷提高,傳統攝影測量只能獲取正射影像的問題也逐漸暴露出來。為彌補這一缺點,傾斜攝影測量技術應運而生。傾斜攝影測量技術有效融合了近景攝影測量與傳統航測技術優勢,但又與傳統航測只能單架次獲取地面物體下視影像的方式不同,其在飛行平臺上增加了與下視方向成15°以上的前、后、左、右4個傾斜鏡頭,加上一個下視鏡頭共五個鏡頭,同時曝光采集地面物體的多視角高清立體傾斜影像[3](如圖1 所示),再借助于全自動高性能后處理系統,可快速構建出具有地物準確位置和清晰紋理的高分辨率真三維實景圖和多種數字化測繪產品,滿足各行業的生產用圖需求。
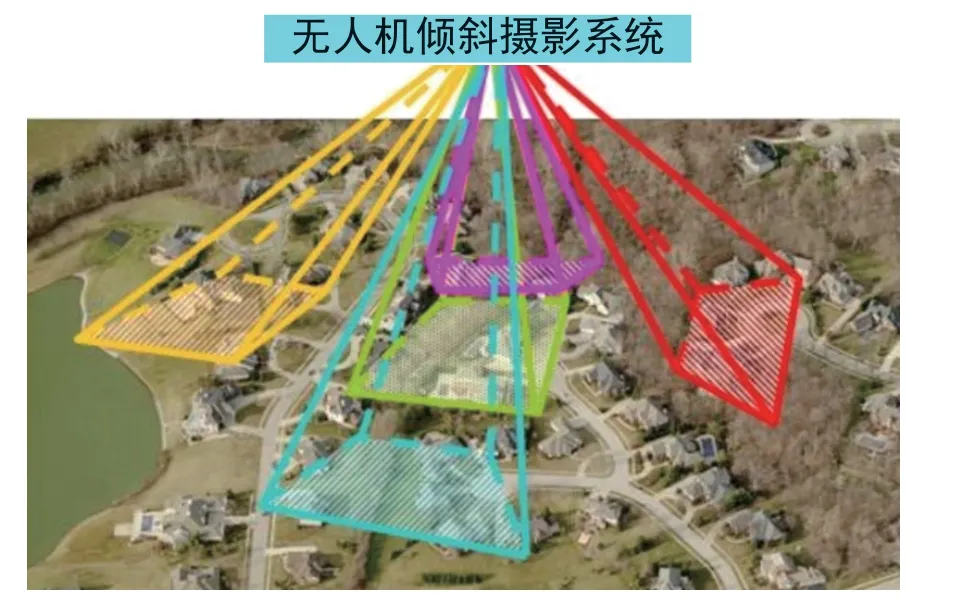
圖1 無人機傾斜攝影測量示意圖
2.3 無人機傾斜攝影測量的優勢
傾斜攝影測量自出現至今,已發展成一項較為成熟的測繪手段。該技術克服了以往航測過程中只能獲取地物垂直視角影像的缺點,可同時獲取多視角影像,通過獲取的多角度影像,快速建立實景三維模型。總體來說,無人機傾斜攝影測量的優點有以下幾方面:
(1)反映測區地物的真實情況。在傾斜攝影測量技術問世前,傳統的航測只能獲取垂直方向上的影像。利用傾斜攝影測量,可以獲取多角度的影像和更加準確的地理信息,更加真實地反映測區地物的真實情況。
(2)自動化程度高。無人機傾斜攝影測量系統數據處理過程無需過多人工干預,可自動完成實景三維模型的建立,在已生成三維模型的基礎上進行地形要素采集,并進一步生成多種數字化測繪產品。
(3)室內可實現數據的立體量測。通過配套軟件的應用,可直接基于成果影像進行包括高度、長度、面積、角度、坡度等數據的量測,擴展了傾斜攝影技術在行業中的應用。
(4)數據量小易于智慧管理。相較于傳統的人工三維建模技術,傾斜攝影獲取的影像及輸出的模型數據量要小得多,其影像的數據及模型數據格式可采用成熟的技術進行網絡發布,快速實現共享及應用。
3 實例應用
3.1 項目背景
本次施測的嘉紹高速公路地處杭嘉湖平原嘉興境內,地勢平坦,水系發達,公路沿線多橋梁涵洞,兩側零星分布居民地及工廠企業,植被以水田為主,視野開闊。經過前期的現場踏勘及技術調研,本項目存在幾個工作難點:(1)高速公路指揮部要求工期非常短,20 天內必須提交40km 1 ∶1000 帶狀圖的全部成果;(2)該路段已于2013 年7 月通車,路面車流量大,如果采用傳統方法派大量人員上路測繪存在重大安全隱患;(3)全封閉道路有鐵絲網與外界隔斷,人員進出不便,地形圖實測難度大。
為解決上述困難,按時完成工作任務,最終決定采用無人機傾斜攝影測量系統進行施測。
3.2 生產流程
無人機傾斜攝影測量系統應用于線性工程測量的主要生產流程如圖2 所示。
3.3 傾斜影像數據采集
(1)外業航飛
本項目采用華測導航公司的P330 Pro 純電動垂起固定翼無人機進行傾斜數據采集(如圖3 所示),P330 Pro 平臺具有長航時、多載荷等優勢,飛機搭載睿鉑DG3 傾斜攝影相機,適用于線性工程的傾斜數據采集。根據區域圍線,制定本次飛行計劃,設置無人機航飛的高度為200m,獲取影像地面分辨率為0.05m,航向重疊度為80%,旁向重疊度為70%。本項目按照作業范圍線路方向敷設航線,一架次航程小于飛行器的最遠航程,采用用地紅線外擴≥200m 以確保本次航測作業全部覆蓋攝區。選擇有利的氣象條件進行外業航飛,最終飛行30 多個架次,共獲取測區16978 張傾斜影像,覆蓋面積為25km2。經檢查本次航攝攝區未有漏洞,目標區域邊界全部覆蓋,影像色彩鮮明、反差適中,無明顯模糊、重影和錯位現象,可用于后期產品的制作。
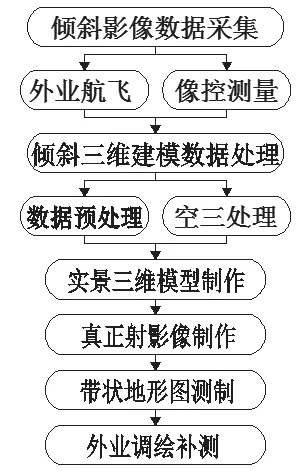
圖2 生產流程

圖3 華測P330 Pro純電動垂起固定翼無人機
(2)像控測量
為保證成圖精度,本項目像控測量全部采用平高點單航帶布設方案,按分段6 點法進行布設。采用ZJCORS 網絡RTK 系統進行像控點測量,測量時每個控制點觀測次數不少于2 次,每次采樣間隔應重啟儀器,取各次測量中數作為最終結果。
3.4 傾斜三維建模數據處理
(1)數據預處理航攝飛行獲取的原始影像數據,使用與相機鏡頭配套的專業軟件進行圖像后處理,對每架次飛行獲取的影像數據進行及時、認真的檢查和預處理,對不合格的區域需進行補飛,確保所有的影像清晰、色彩柔和無反差、拼接無明顯重影和錯位現象。
(2)空三處理
空三處理使用Context Capture 軟件,該軟件的AT 模塊采用光束法局域網平差,支持垂直影像和傾斜影像同時導入參與空三計算,根據外業測定的像控點成果提取特征點和同名像對,再通過連接點匹配、相對定向、區域網聯合平差等步驟,最終獲取到空中三角測量成果。
(3)實景三維模型制作
本項目利用Smart3D 軟件進行實景三維模型的生產,由于模型制作的計算任務量較大,為提高數據處理速度,在處理過程中將攝區分割成多個模型單元進行處理,同時工作站采用并行CPU 框架硬盤。以空三成果作為數據源,Smart3D 軟件無需人工干預就能全自動快速生成逼真的實景三維模型。測區部分正射影像和實景三維模型如圖4 所示。

圖4 測區部分正射影像和實景三維模型
(4)帶狀地形圖測制
在實景三維模型建立完成后,基于Cass3D 進行帶狀地形圖要素采集,內容主要有宅基地及其上定著物與附著物,道路、水系等。測圖成果為初級DWG 格式的線劃圖,采用CASS9.1 進行圖形數據的編輯。
(5)外業調繪補測
矢量數據測圖完畢,經粗略編輯后的數字線化圖打印輸出進行外業調繪,對原圖上錯繪和遺漏的地物、地貌進行補測,測注高程注記點,同時調注各種地理名稱、房屋層數結構等,賦予屬性信息,外業調繪完成后再轉內業進行成果整理,經質量檢查合格后完成帶狀地形圖的測制。
3.5 精度檢查
為了檢測本次實景三維模型成果以及帶狀地形圖的精度,均勻選取三維模型與地形圖內房角以及地面具有明顯特征的若干個檢查點,利用全站儀和ZJCORS網絡RTK 實測的方法,將實測坐標與從模型及地形圖上量測的解析坐標進行比對,經統計分析后的結果如表1 所示。
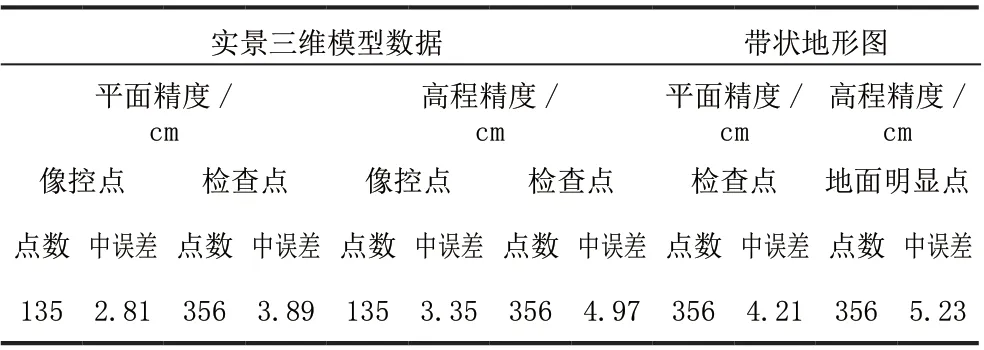
表1 實景三維模型與帶狀地形圖精度檢查統計
從表1 的檢查結果可以看出:實景三維模型像控點的平面位置中誤差為2.81cm,高程中誤差為3.35cm ;檢查點的平面位置中誤差為3.89cm,高程中誤差為4.97cm。帶狀地形圖檢查點的平面中誤差為4.21cm,高程中誤差為5.23cm,均滿足《三維地理信息模型數據產品規范》(CH/T9015-2012)以及《公路勘測規范》(JTG C10-2018)的相關精度要求[4]。
4 結束語
無人機傾斜攝影測量系統具有機動靈活、高效、成本低、精度高等優勢,本項目利用該技術成功完成了40km 的高速公路測量任務,其構建的三維實景模型真實逼真、紋理豐富,生成的正射影像以及帶狀地形圖在精度上完全滿足線性工程的實際生產需求,為線性工程測量提供了一條嶄新的技術思路。針對線性工程戰線長、專業性強等特點,通過本次應用,提出以下兩點建議:
(1)選用長航時、圖傳距離長的無人機,這樣就可以減少飛行架次,節省外業時間。
(2)針對建模處理工作量大的問題,建議工作站采用并行CPU 框架硬盤,專用硬盤存儲可保證快速數據讀取及高效計算[5],處理能力極大提高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
