基于無人機傾斜影像的住宅區單株樹木檢測研究
2022-09-07 08:11:18馮啟翔
資源導刊(信息化測繪) 2022年7期
馮啟翔
(1.廣州市房地產測繪院,廣東 廣州 510030;2.廣州市測繪產品質量檢驗中心,廣東 廣州 510030)
無人機遙感技術正處于快速發展之中,無人機遙感應用具有許多優勢(如操作靈活性),針對不同的應用場景,業內提出并驗證了各種基于無人機的遙感方法。由于無人機飛行高度往往較低,無人機遙感很少受到云層的影響,飛行活動可以更靈活地規劃和操縱。因此,大量基于無人機成像的應用已經在多個領域進行了嘗試,如研究地質構造、森林、農業等[1]。
傾斜攝影的亮點在于其技術優勢,斜向成像可以用獨特的透視圖來補充傳統的垂直攝影。具體來說,這種技術可以看到建筑物、結構或特征的每一面,并可以暴露盲點、出口和入口[2]。它還可以改進對難以看到的基礎設施(如燈柱、電線桿、大道樹木等)的識別,它甚至可以直接測量地物的高度、長度和面積。而基于傳統的垂直攝影很難定位這些特征,這些優勢已經在生成城市區域的虛擬圖像、繪制三維城市模型的紋理、提取建筑的應用中得到驗證。
然而,無人機傾斜攝影成像較少應用于城市園林和城市綠化中,樹木等植被的重建仍然是一項具有挑戰性的任務,因為不同視角下,它們的外觀可能會有很大差異[3]。雖然已經有一些工作致力于通過從傾斜圖像生成點云(例如通過密集匹配)來開發解決方案,從無人機傾斜圖像中獲取樹木結構參數的技術進展一直被報道,但實踐表明,無人機的引入迄今為止幫助不大。雖然一些特征參數可以通過統計相關性進行檢索,但樹高方面的測量結果與實際結果相差很大。
提取無人機傾斜圖像中的單個樹木可為其三維結構重建提供一些先驗知識。與傳統最低點攝影中的樹冠上表面相比,以無人機傾斜圖像形式表示的孤立樹木有助于提供更多屬性。事實上,有許多應用場景只需要樹檢測,而不是復雜的樹結構重建,涉及三維點的生成。因此,開發無人機傾斜圖像中直接檢測單株樹木的方法具有十分重要的意義。
目前,仍然缺乏直接在無人機傾斜圖像中檢測單個樹木的研究。針對這一差距,本研究試圖將無人機傾斜成像技術引入城市林業和城市綠化中的樹木調查,并致力于開發新方法,從無人機傾斜RGB 圖像中檢測住宅環境中的單個樹木。
1 數據獲取
1.1 無人機成像系統
無人機成像系統包括一架微型無人機md4-200,它是一種由電池供電的四旋翼無人機,能夠攜帶300克的有效載荷。這種無人機可以在一個小的開闊區域內垂直起飛和降落,并且有一個帶有羅盤和慣性、陀螺、氣壓和GPS 傳感器的機載飛行控制器。使用當前電池的飛行時間為10 ~20 分鐘。系統對風敏感,要求風速低于4 米/秒以獲得受控圖像塊[4];風速超過4 米/秒時,無人機會急劇傾斜,并導致較大的俯仰角和側傾角。md4-200 配備了理光GR Digital III(理光GR3)數碼緊湊相機。該相機的鏡頭固定焦距為6毫米,相機裝有一個7.6 毫米×5.7 毫米(3648×2736像素)的CCD 傳感器,像素大小為2μm。
1.2 數據獲取
研究區域位于廣州市南沙區(北緯22°38′,東經113°35′),是一個典型的居住區。數據采集時間為2021 年8 月,采集高度約為地面以上40 米,傾斜圖像的角度是任意的。未經失真校正等預處理,但直接用于測試的原始圖像以快視圖形式示出,如圖1 所示(主要<0.2m GSD)。有道路、燈桿、樹木、汽車、草坪、灌木和建筑物,這些都是住宅環境中常見的組成部分。試驗現場主要由紅色屋頂、綠色植被和灰色道路組成,它們的比例在不同地塊甚至不同視角下有所不同。一般來說,這表明植被是不可忽視的,這是試驗場地顯示的宜居環境的特征。香樟和松樹的樹木高度中等(4 ~5 米),即使在單個圖像中,每棵樹的視角仍然不同,這表明僅基于有限數量的采集圖像驗證所提出的算法是可行的。
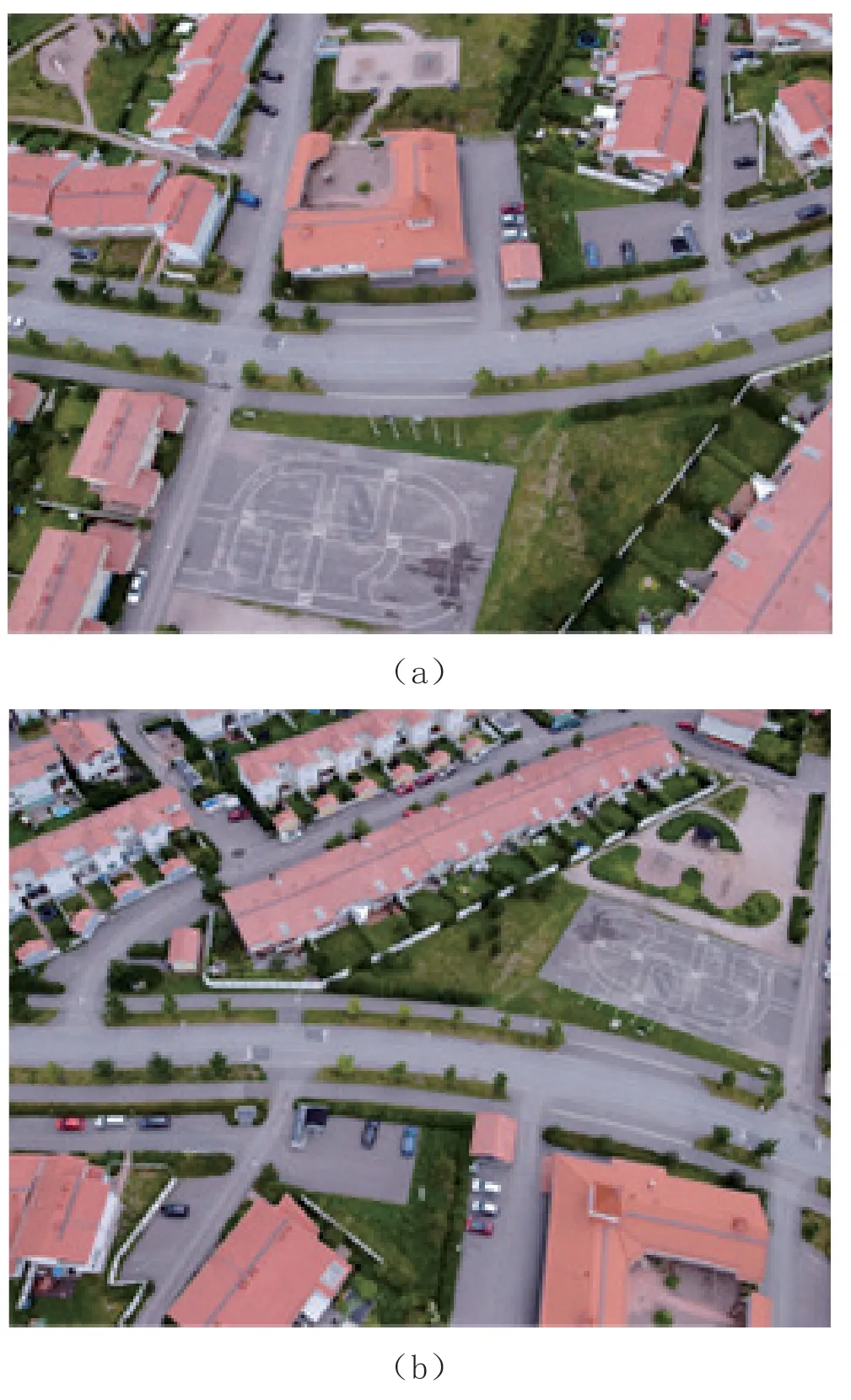
圖1 不同角度的無人機傾斜影像
2 研究方法
2.1 成像特征分析
在傳統的樹木檢測工作中,高密度或中等密度森林區域的高空間分辨率圖像的三維視圖通常被描述為山地空間結構[5]。對于具有這種圓錐形結構的樹木,圖像中的明亮峰值對應于通常具有更高水平太陽照明的樹梢。因此,檢測樹梢的問題可被視為在圖像中尋找明亮峰值的問題,即在其周圍像素中找到亮度值最大的像素。對于VHR 圖像,大多數針對樹木檢測的算法仍然植根于這一原理。
然而,居住環境圖像中的樹木呈現出顯著的特征。首先,在這樣的圖像中,斜視圖會使樹頂偏離其中心,而樹頂可能不是最亮的部分。其次,無人機低空飛行引發的超高空間分辨率(UHR,GSD<0.5m)使樹冠顯示出較大的反射率變化,將其視為傳統假設的山地空間結構是不合適的[6]。第三,在無人機傾斜圖像中,單個樹木的背景往往在很大程度上不同,無人機傾斜圖像可能會顯示以道路、土地、草坪、燈桿、墻壁或其混合物為背景的單個樹木。因此開發適合無人機傾斜圖像中樹木檢測的新算法需要考慮上述所有特征。
2.2 算法程序
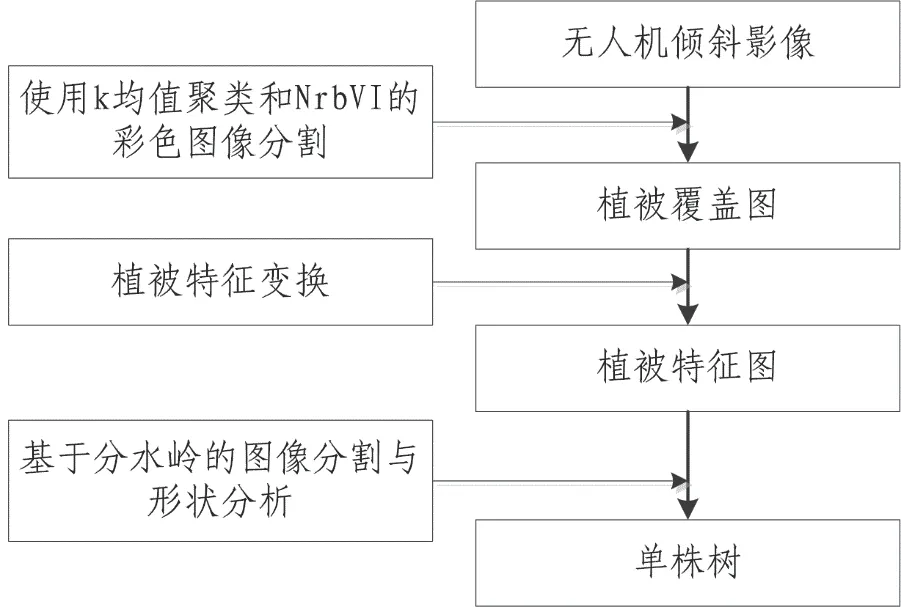
圖2 算法流程
2.2.1 土地覆蓋分類
(1)基于顏色的k 均值聚類圖像分割
居住環境通常意味著圖像中復雜的顏色分布,這對于單個樹木的檢測是一個挑戰。為了克服這個問題,首先對土地覆蓋分類進行操作,這有助于限制樹木檢測的有效范圍。本研究基于顏色的圖像分割算法,k均值是用于確定數據集中存在的自然光譜分組的聚類算法,數據中要定位的集群數量提前給出。該算法在多維測量空間中任意地對該數量的聚類中心進行定位。圖像中的每個像素都被分配給任意平均向量最接近的簇。該過程持續進行,直到在算法的連續迭代之間,類平均向量的位置沒有顯著變化。然后,利用k 均值聚類的結果對圖像中的每個像素進行標記,從而對圖像進行分割。
(2)使用從RGB 導出的新植被指數進行圖像分類
分割結果并不意味著每個分段對應的對象類型已知,需要確定由樹木組成的植被段集。對于這個問題,植被指數的傳統概念有助于對如何構思可能的解決方案提供一些啟發。眾所周知,植被識別通常采用歸一化差異植被指數(NDVI)的參數(Liang,2004)。盡管理光GR3 相機的RGB 相關顏色通道與NDVI 中通常定義的光譜帶并不完全一致,但可以基于相機R 和B 波段(NrbVI)合成一個類似NDVI 的植被指數,用于植被識別。如公式(1)所示,NrbVI 值大于0.1 的像素可以標記為植被類型,這符合NDVI 應用中的常見規則。

注意提取的像素需要進一步篩選,以減少顏色通道不一致情況下引入的虛假像素。考慮到輸入的不一致性往往表現為極端的輸出情況,但數量很少,篩選是基于統計數據進行的。具體而言,根據直方圖單獨分析RGB 值,并使用高斯函數擬合其概率分布,它們的平均和標準偏差參數可以計算出來,然后將排除位于范圍之外的像素。從理論上講,這種行為可以增加顏色通道一致性的比率,并且可以以更高的精度識別植被覆蓋。
(3)通過綜合分割和分類結果生成植被覆蓋圖
很難保證存在一組完全重疊植被類型像素的同類型分段。解決方案是使用邏輯AND 運算處理它們的重疊程度。經過重疊像素統計和比較,顯示最大重疊程度的一組線段被視為植被覆蓋圖。
2.2.2 植被特征轉換
植被覆蓋圖可以有效地縮小單個樹木檢測的搜索范圍,但仍然不能直接給出孤立的樹木。此外,樹木、灌木和草坪在顏色上的相似性使它們很難區分。就亮度而言,樹木可能比草坪暗、類似草坪或比草坪亮。因此,單純依靠RGB 值的參數不足以區分樹木、灌木和草坪。為了區分不同的植被類型,需要找出能夠一致表征其特征的新參數。
事實上,就質地而言,樹冠明顯不同于草坪,樹枝和樹葉的復雜多變的布局使得樹冠比草坪表現出更高的顏色變化,草坪在相對光滑的表面上往往呈現出相對較高的反射率,尤其是在斜視圖中較明顯。當然,亮度作為植被類別的一個重要指標仍然是假設的,畢竟在大多數情況下,樹木呈現出與草坪不同的顏色。此外,如果樹木和草坪顯示相同的紋理,顏色可能會有所幫助。
因此,通過合成用于植被特征轉換的紋理和RGB亮度的特征參數,提出了公式(2)中列出的新參數。對于植被覆蓋圖中的每個像素,其值將替換為公式(2)的結果。具體來說,在植被覆蓋圖上部署半徑為R 的圓形窗口,其中心位于每個像素上。對于每個這樣的像素,窗口內像素的標準偏差(std)和R、G 和B 值的平均值Pmn-Pij≤R是計算出來的。然后,將像素值替換為它們各自的比值之和。由于使用圓形窗口只是為了檢查紋理特征,因此可以通過比較經驗得出的樹木大小或樹木樣本的平均大小與平均GSD 來確定R 值。這個新變量的新植被特征圖將用于單株樹木檢測。

2.2.3 單株樹檢測
本文使用標記控制的分水嶺分割提取單株樹木。植被特征圖有助于提取單株樹木,而且樹木和灌木的亮度相對高于草坪。然而,這與植被覆蓋圖中顯示的場景不同。基于這一現象,本文提出一種基于分水嶺分割的樹木檢測解決方案。分水嶺分割的原理是將灰度圖像視為地形表面,其高度與灰度成反比,然后逐漸淹沒。隨著水位上升,封閉的分水嶺線可以形成分段的邊界,即此處的單個樹木,該方法可以在一定程度上解決冠合并問題。
3 數據處理和精度評估
3.1 植被覆蓋圖
首先,使用k 均值聚類的基于顏色的圖像分割的結果如圖3(a)所示。分割產生了三種土地覆蓋類型,即綠色標記植被、紅色標記建筑屋頂和藍色標記其他。而后,使用從RGB 導出的新植被指數(NrbVI)進行圖像分類,結果如圖3(b)所示。在這種情況下,從原始圖像中導出的用于公式(2)中R、G 和B 的平均值和標準偏差分別為63 和21、77 和26,以及7 和21。雖然并非所有的植被都已經被提取,但提取的像素大多屬于植被。這確保了下一次操作的效果。在綜合分割和分類結果后,如圖3(c)所示為植被覆蓋圖生成結果。
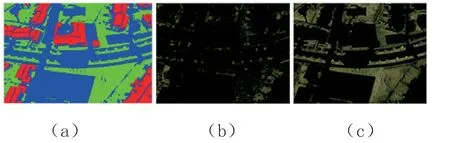
圖3 植被覆蓋圖生成結果
3.2 植被特征圖
圖4(a)中示出了窗口半徑R 設置為15 像素的步驟2 的結果。與直接從RGB 彩色圖像轉換而來的相應灰度圖像[如圖4(b)所示]中的場景相比,在生成的植被特征圖中,樹木比草坪相對明亮。事實上,一些在RGB 圖像中很難通過視覺判讀識別的樹木在NrbVI變換后清晰地顯示出閃亮的斑點。在RGB圖像中,一些模式相同的小尺寸樹也顯示出清晰的邊界。這有助于區分個別樹木。
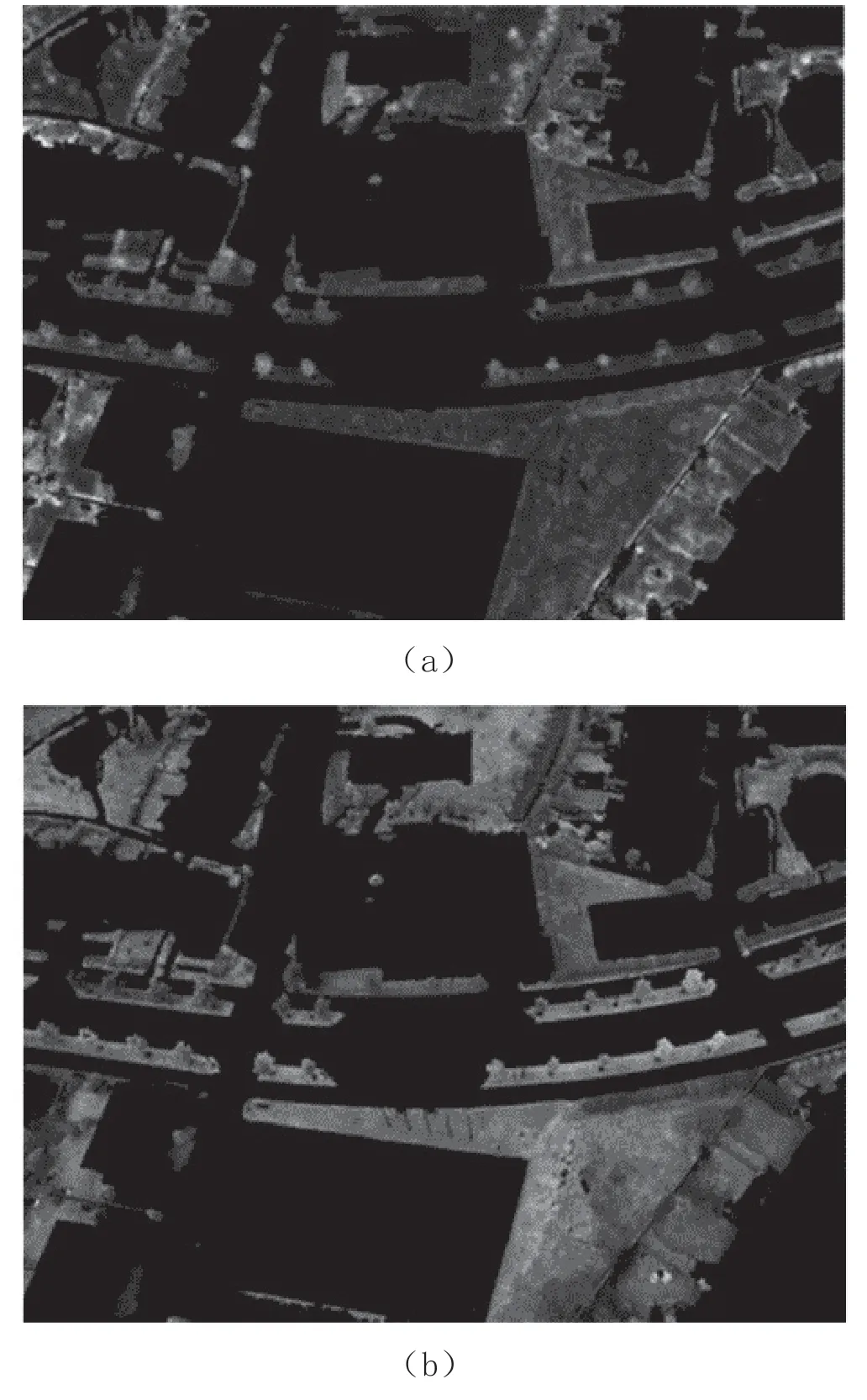
圖4 植被特征圖
3.3 單株樹檢測
使用標記控制的分水嶺分割提取單個樹木的結果如圖5 所示。形狀分析后(通過對PCA 確定的長軸與其垂直軸之間的比率設定閾值,并排除邊界線性部分的樹木),可以在一定程度上排除特征類似于樹木的灌木和當地草坪。然后,在表1 的圖2a 和圖2b 中,分別確定54 和33 棵形狀相對完整且可區分的樹作為基本事實,并根據誤判和漏判誤差評估所提出算法的性能。如表1 所示,可以驗證新算法的有效性。
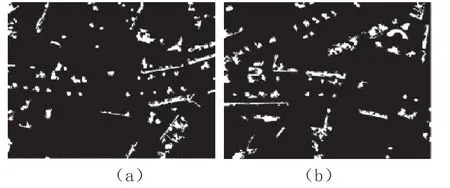
圖5 單株樹分割結果
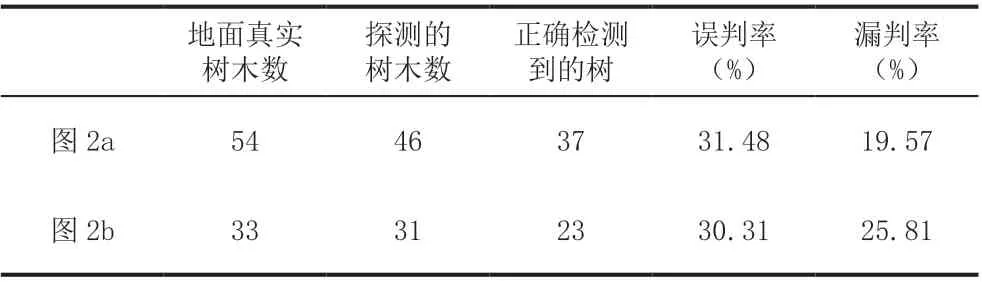
表1 算 法的精度評估
4 結論
本文提出的新特征參數綜合了紋理和RGB 亮度的常用特征參數,測試的結果驗證了所開發的算法可用于在無人機采集的住宅環境的單個傾斜圖像中直接檢測單個樹木。該算法還需要不斷改進,以適應不同的場景。對于天然林中的單株樹木,可能會滿足不同的空間分布模式,樹冠可以部分成像,樹干可以完全著色,這將不同于本研究部署在住宅環境中的場景。在住宅環境中,單個樹木的分布相對孤立,樹干通常在圖像中可見。此外,將森林圖像區分為樹木和背景對象也是一項具有挑戰性的任務,因為光照、不同顏色陰影和不均勻的樹皮紋理等變化很大。因此,本研究中提出的算法在應用于茂密森林時需要進行調整。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
