特種高壓清洗機器人集群監控系統技術研究
2022-09-06 02:52:14張培銘汪子睿
今日自動化 2022年8期
張培銘,汪子睿
(1.廣西機械工業研究院有限責任公司,廣西南寧 530007;2.廣西交通投資集團南寧高速公路運營有限公司,廣西南寧 530007)
高壓清洗技術作為環保的新興技術已經逐漸替代會污染環境的化學清洗,在制糖、酒精、氧化鋁等行業開始廣泛應用。特種高壓清洗機器人的成功研發解決了高壓清洗領域機器換人的問題,并在制糖、氧化鋁等行業逐漸推廣應用。在設備的推廣過程中,發現特種高壓清洗機器人的設備操作人員和維護人員文化水平不高,且年齡普遍偏大,現場培訓需要投入大量的人力物力,且只能達到簡單的應用效果,有些流程性工廠還遇到崗位經常變動的情況,這些問題的存在制約了設備性能的發揮和推廣,更嚴重者由于操作者對設備的不熟悉,在設備發生故障時不能夠快速排查故障并解決問題,容易影響生產效率。
因此,需要結合物聯網、大數據分析、人工智能等技術,開發易操作,具備故障自診斷、遠程運維、智能分析、能夠集群監控等功能的特種高壓清洗機器人系統,降低使用者的運維難度,能夠實現遠程指導和快速排除故障,并對機器人進行健康監測研究,提高設備的穩定性。
文章介紹特種高壓清洗機器人集群監控系統的一些關鍵技術研究,為高壓水射流清洗機器智能化系統研究提供參考。
1 特種高壓清洗機器人組成和原理
特種高壓清洗機器人為XY平臺式或關節式結構,其中XY平臺式特種高壓清洗機器人由XY運動平臺、換區頂桿、高壓水槍輸送裝置組成,如圖1和圖2所示。采用機器視覺系統進行列管坐標數據的采集,采用數據庫技術記錄和優化清洗路徑,通過上位機下達指令控制四軸數控系統實現清洗設備的XY軸運動、旋轉、換區和定位,以帶動高壓水槍至所需清洗列管,并準確帶動高壓水槍往復運動,實現對列管的清洗除垢作業。
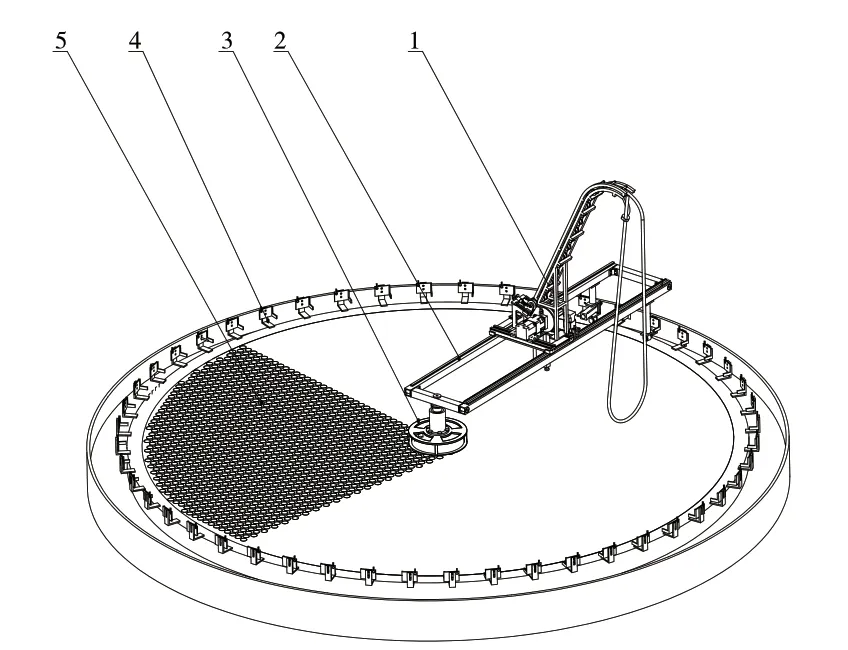
圖1 XY平臺式特種高壓清洗機器人結構

圖2 XY平臺式特種高壓清洗機器人的應用
2 特種高壓清洗機器人集群監控系統
特種高壓清洗機器人集群監控系統由上位機、下位機、通訊模塊組成。系統上位機采用.net4.6設計。系統設計需重點研究機器人之間的干涉、最優路徑規劃,沖突規劃等內容,同時開發具備一鍵啟動,一鍵復位等智能化功能簡易版操作系統。
同時,酒精、氧化鋁行業因為沒有進行冗余設計,對高壓清洗作業的時效性要求很高,往往需要控制多臺機器人設備同時作業,因此集群監控系統還需具備自動選擇清洗模式和根據情況進行清洗路徑優化,能夠避免多機器人相互干涉的功能。
3 基于多傳感器融合的特種高壓清洗機器人智能化控制研究
特種高壓清洗機器人是多傳感器融合的智能化設備,在進行系統設計時,需根據客戶的清洗時間速度來配置多臺清洗機器人協同作業,同時通過傳感器來檢測設備的運行狀態和對故障進行智能診斷,并設計設備生命周期監測系統,提高設備的使用壽命。
3.1 參數的智能化設置和記錄
特種高壓清洗機器人應用在制糖、酒精、冶金等行業,根據生產工藝不同,積垢的硬度、物質、厚度以及加熱管的孔徑和長度也不同,系統在不同的工況中運行,需要調節和固化不同的運行參數。機器人在實際使用中需要設置和調節相關參數:調節清洗長度、清洗速度、雙系統作業的安全距離、檢測清洗長度脈沖信號等。在對一個罐體進行清洗時,通過調節相關參數,使系統在最優的狀態下運行,以優化清洗時間,提高清洗效率,同時系統自動記錄其罐體的最優清洗參數并進行固化,實現“一鍵開機”,減少人為干擾。
3.2 實現對特種高壓清洗機器人傳感器和電機等設備的運行狀態監控
特種高壓清洗機器人有壓力、電磁、溫度等傳感器和伺服電機等執行元件,監控系統通過采集各傳感器的運行狀態,運用數據分析與處理技術,來監控特種高壓清洗機器人是否正常工作,一旦發生故障提示,系統根據傳感器的故障類別和故障組合指導操作人員進行故障排除。
如系統可通過采集伺服電機的主電機電流、過載率、電機轉速、電機溫度、清洗速度等關鍵參數,并結合清洗工藝,實現設備的智能化運行分析,如圖3所示,可根據電機的電流變化等參數,來判斷設備是否存在機械故障隱患,電機電流在綠色區域表示設備運行正常,在黃色區域狀態下表示存在機械隱患,紅色區域狀態下表示機器人運行異常,應強制停機。
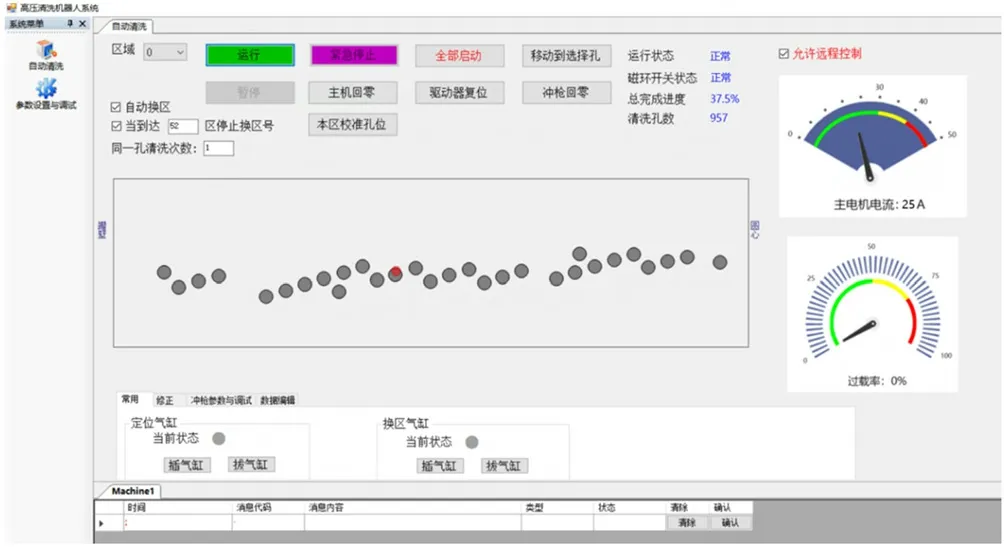
圖3 用戶設備運行狀態與主電機電流監控
3.3 基于多傳感器融合技術的智能診斷技術研究
總結特種高壓清洗機器人的不同狀況,并跟相關狀況對應傳感器的狀態聯系起來,將清洗狀態進行數字化,并結合對應的處理工藝,構建特種高壓清洗機器人智能診斷系統。
以“行程檢測開關+編碼器+合理清洗周期”檢測加熱管是否堵塞為例。在實際使用過程中,由于生產工藝的波動或清洗不及時,會造成加熱管積垢積累較多,形成堵塞,在面對半堵塞孔時,若特種高壓清洗機器人不設置感知程序,其往往會造成高壓噴嘴卡在半堵塞的加熱管里,更嚴重時需要停機處理,每次處理時間在0.5h 以上,嚴重影響清洗效率。本文將“主電機速度(編碼器)+行程檢測開關輸出信號頻率+單管清洗時間”三者融合用于判斷加熱管是否堵塞。例如設定清洗速度80后,主電機轉速(編碼器)應該是500 r/min,此時檢測開關對應輸出脈沖信號頻率是600 Hz,行程檢測開關低于預測頻率的1/2即300 Hz,即可判斷加熱管堵塞。同時系統設置了兩種策略處理半堵塞孔的清洗。
(1)若清洗時間充足,檢測到堵塞后系統記錄該次堵塞行程,高壓噴嘴立即回收,然后繼續清洗該目標清洗,清洗行程是上次堵塞行程2~100 cm(可調),如此反復直到該目標被清洗完成。
(2)若清洗時間緊張,記錄該堵塞目標,立即移動到下一目標。全部加熱管清洗完成后再判斷是采用人工清洗還是下次再清洗。
3.4 高壓水系統智能化監管
高壓水系統是清洗效果的關鍵因素,其由高壓泵站、水循環處理單元、高壓連接管和噴嘴組成。糖廠、酒精廠等行業的高壓水系統通常由簡易水箱和泵組成,需要派駐專門的人員時刻關注設備的運行狀態,如有沒有水,泵壓力是否下降等,人工作業環境惡劣,效率低,時常出現因為對高壓水系統監控和處置不及時,清洗效果差等情況。為了改變這種情況,本文設計了一套智能化程度比較高的高壓水系統,通過PLC實時采集水量、壓力、流量等數據,并結合特種高壓清洗機器人的工作狀態,建立相關的診斷分析模型,實現高壓水系統的智能化管理。其能夠對水循環單元進行水量控制,通過分析水量的變化波動,分析水循環中的過濾系統或噴嘴是否堵塞等;通過檢測水系統的壓力和水流量變化,分析高壓連接管和噴嘴是否工作正常等。
3.5 特種高壓清洗機器人生命周期健康監測
特種高壓清洗機器人是多傳感器融合的智能化系統,其常工作在高溫高濕的環境,清洗打散的積垢也會常常附在設備上,設備的高速往復運轉也會造成如軸承、滑塊、噴嘴、高壓管、壓輪等成為需要定期更換的易損件,如不及時監測和更換,會造成故障并影響生產。因此,項目團隊研發了設備生命周期健康監測系統,根據清洗機器人的工作時間、清洗速度變化情況等綜合因素,指導用戶對設備進行保養、更換易損件等,確保設備運行穩定。圖4所示為關鍵部件的工作壽命分析圖。

圖4 關鍵零部件的工作壽命分析
4 應用情況
結合磁力、光電、視覺、溫濕度、壓力等傳感器,實現了傳感器數據采集和數據融合,自主開發了分布式多傳感器信息融合的特種高壓清洗機器人集群監控系統,具有自檢測、自診斷,及在線工業物聯網集群監控功能,該系統實現了基本設置、全自動找孔、全自動清洗、高壓水系統監控、智能化等功能。實現了對單機多機高速視覺找孔監管、全自動清洗,并在清洗過程中可以根據不同的狀況調整不同的清洗策略,可遠程監控、故障診斷和維護,為企業實現一體化管控、遠程管控、無線端管控、智能管控的自動清洗提供最佳的解決方案。
5 結束語
高壓清洗的專業性比較強,需要根據不同的清洗情況調整不同的策略,不少企業高壓清洗使用者文化水平低,對哪種場景使用何種噴嘴經驗總結不足,造成清洗能耗高、清洗效果不好,研究人員下一步將研究一套高壓清洗策略庫,便于提升清洗品質。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
印刷工業(2020年4期)2020-10-27 02:45:52
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國交通信息化(2017年4期)2017-06-06 07:21:52
工業設計(2016年12期)2016-04-16 02:52:00