市政工程用定向鉆機(jī)液壓系統(tǒng)運(yùn)動(dòng)學(xué)參數(shù)標(biāo)定技術(shù)
2022-09-05 06:25:20林集體
現(xiàn)代機(jī)械 2022年4期
關(guān)鍵詞:系統(tǒng)
林集體
(中鐵十八局集團(tuán)第五工程有限公司,天津 300450)
0 引言
定向鉆機(jī)液壓系統(tǒng)的工作原理為液壓泵對(duì)定向鉆機(jī)的鉆頭施加一定的軸向移動(dòng)壓力,控制懸掛移動(dòng)鉆具,實(shí)現(xiàn)鉆具的快速換向。
系統(tǒng)的穩(wěn)態(tài)特性可以滿足鉆井過程需要大扭矩的要求。然而,在系統(tǒng)工作初期,由于管道泄漏、油壓壓縮、液壓泵出口壓力等因素,系統(tǒng)的穩(wěn)態(tài)性能難以預(yù)測(cè),且定向鉆機(jī)液壓系統(tǒng)定向鉆具的運(yùn)動(dòng)控制效果直接影響系統(tǒng)的工作性能,可能導(dǎo)致系統(tǒng)回路壓力上升,影響液壓系統(tǒng)正常工作和使用壽命。因此,需要對(duì)液壓系統(tǒng)的運(yùn)動(dòng)學(xué)參數(shù)進(jìn)行標(biāo)定,進(jìn)一步校準(zhǔn)影響系統(tǒng)穩(wěn)態(tài)的參數(shù)。其中,文獻(xiàn)[1]研究了新型礦用鉆機(jī)開孔定向儀的標(biāo)定及誤差補(bǔ)償技術(shù),確定誤差來源,對(duì)高階性誤差進(jìn)行辨識(shí)補(bǔ)償,實(shí)現(xiàn)參數(shù)標(biāo)定;文獻(xiàn)[2]研究了基于無量綱化辨識(shí)雅可比矩陣選取測(cè)量位姿的Stewart并聯(lián)機(jī)構(gòu)運(yùn)動(dòng)學(xué)標(biāo)定方法,實(shí)現(xiàn)對(duì)并聯(lián)機(jī)構(gòu)運(yùn)動(dòng)學(xué)的標(biāo)定。
以往的方法雖然能夠?qū)崿F(xiàn)運(yùn)動(dòng)學(xué)參數(shù)標(biāo)定,但是在不同的驅(qū)動(dòng)力和阻尼力影響下,產(chǎn)生傾斜角誤差,運(yùn)動(dòng)學(xué)參數(shù)標(biāo)定效果較差,為此,設(shè)計(jì)一個(gè)市政工程用定向鉆機(jī)液壓系統(tǒng)運(yùn)動(dòng)學(xué)參數(shù)標(biāo)定技術(shù),以期解決當(dāng)前存在的問題。
1 定向鉆機(jī)液壓系統(tǒng)動(dòng)力學(xué)參數(shù)分析
1.1 確定系統(tǒng)穩(wěn)態(tài)響應(yīng)參數(shù)
定向鉆機(jī)液壓系統(tǒng)的動(dòng)態(tài)特性是重點(diǎn)分析內(nèi)容,即以系統(tǒng)的靜力荷載,作為載荷線性結(jié)構(gòu)穩(wěn)態(tài)響應(yīng)情況。對(duì)此,應(yīng)該使用模態(tài)分析對(duì)定向鉆機(jī)液壓系統(tǒng)進(jìn)行建模,以諧響應(yīng)過程的非線性特征,結(jié)合系統(tǒng)固有頻率,研究系統(tǒng)的動(dòng)態(tài)特性和穩(wěn)態(tài)響應(yīng)參數(shù)。
首先,模態(tài)分析是研究物體結(jié)構(gòu)動(dòng)力學(xué)特征的一種近代方法,其主要以振動(dòng)理論為基礎(chǔ)[3],而在定向鉆具的傳動(dòng)和控制中,由于該系統(tǒng)結(jié)構(gòu)復(fù)雜,其動(dòng)態(tài)特性會(huì)響應(yīng)外界載荷的變化,導(dǎo)致系統(tǒng)偏離穩(wěn)態(tài),以此建模分析液壓系統(tǒng)的動(dòng)態(tài)特性,定向鉆機(jī)液壓系統(tǒng)穩(wěn)態(tài)模型如下[4]:
(1)
公式(1)中,K代表液壓系統(tǒng)動(dòng)態(tài)特征參數(shù),M代表系統(tǒng)固有振動(dòng)頻率,ω代表系統(tǒng)特有的振型,φi代表第i次振動(dòng)時(shí)的動(dòng)態(tài)特征向量。
其次,系統(tǒng)的動(dòng)態(tài)特性會(huì)響應(yīng)載荷,影響系統(tǒng)穩(wěn)態(tài),因此需要通過諧響應(yīng)計(jì)算方法和靜力學(xué)分析方法建模分析系統(tǒng)的穩(wěn)態(tài)響應(yīng)參數(shù)。
諧響應(yīng)是指液壓系統(tǒng)在外界載荷逐漸增加下的時(shí)間線性結(jié)構(gòu)穩(wěn)態(tài)響應(yīng)情況[5]。在計(jì)算過程中,將激勵(lì)開始時(shí)發(fā)生的瞬時(shí)振動(dòng)排除在外,同時(shí)其他非線性特征也忽略,將諧響應(yīng)的動(dòng)力學(xué)方程表示為[6]:
F=(-ω2M+iωC+K)({φ1}+i{φ2})
(2)
公式(2)中,C代表質(zhì)量矩陣。
最后,在此基礎(chǔ)上進(jìn)行靜力學(xué)分析,靜力學(xué)分析主要分析液壓系統(tǒng)在恒定荷載作用下的穩(wěn)態(tài)響應(yīng)情況[7],將計(jì)算公式表示為:
ku=F
(3)
公式(3)中,k代表剛度矩陣,u為系統(tǒng)的位移矢量,F(xiàn)代表系統(tǒng)的靜力荷載。
通過上述過程預(yù)先對(duì)系統(tǒng)模態(tài)分析與靜力學(xué)分析,確定了系統(tǒng)的穩(wěn)態(tài)響應(yīng)參數(shù)。
1.2 構(gòu)建定向鉆機(jī)液壓系統(tǒng)動(dòng)力學(xué)模型
液壓泵是整個(gè)定向鉆機(jī)液壓系統(tǒng)中的核心部分,通過施加軸向移動(dòng)壓力控制著定向鉆機(jī)轉(zhuǎn)向,因此需要對(duì)液壓泵的運(yùn)動(dòng)壓力建模。將液壓泵的運(yùn)動(dòng)微分方程表示為:
L=xL+As(ps-pL)-Fs
(4)
公式(4)中,xL代表閥芯位移參數(shù),As代表控制腔的作用面積,ps代表液壓泵的出口壓力參數(shù),pL代表負(fù)載反饋口的壓力參數(shù),F(xiàn)s代表閥彈簧預(yù)調(diào)力。
在定向鉆機(jī)液壓系統(tǒng)動(dòng)態(tài)分析過程中,位置和位姿是會(huì)發(fā)生改變的,所以使整個(gè)系統(tǒng)的驅(qū)動(dòng)力和阻尼力狀況有所不同,聯(lián)立上述公式,將定向鉆機(jī)液壓系統(tǒng)的動(dòng)力學(xué)模型表示為:
(5)
通過定向鉆機(jī)液壓系統(tǒng)動(dòng)力學(xué)模型,為系統(tǒng)動(dòng)力學(xué)參數(shù)標(biāo)定提供基礎(chǔ)。
2 定向鉆機(jī)液壓系統(tǒng)運(yùn)動(dòng)學(xué)參數(shù)標(biāo)定實(shí)現(xiàn)
2.1 構(gòu)建傾斜角校準(zhǔn)誤差模型
為了描述定向鉆機(jī)液壓系統(tǒng)運(yùn)動(dòng)學(xué)位姿,設(shè)基準(zhǔn)參考系原點(diǎn)為:
P=[px,py,pz]T
(6)
公式(6)中,px、py、pz分別代表坐標(biāo)系中的3個(gè)坐標(biāo)分量。
建立上述坐標(biāo)系后,進(jìn)行運(yùn)動(dòng)學(xué)變換,將運(yùn)動(dòng)學(xué)模型表示為:
f(θ)=gfE0*fE0
(7)
公式中,fE0代表系統(tǒng)相對(duì)于基礎(chǔ)坐標(biāo)系的位置矩陣,g代表矩陣變換參數(shù)。
為了計(jì)算尋北系統(tǒng)坐標(biāo)軸與安裝軸之間的補(bǔ)充和誤差,需要構(gòu)建傾斜角校準(zhǔn)誤差模型。將帶誤差值的模型表示為:
(8)
在此基礎(chǔ)上,進(jìn)一步對(duì)誤差計(jì)算,定向鉆機(jī)液壓系統(tǒng)實(shí)際運(yùn)動(dòng)距離與指定距離會(huì)存在一定的偏差,為此將距離誤差模型引入到其中,將兩點(diǎn)之間的距離誤差表示為:
Δl=|pM2-pM1|-|pB2-pB1|
(9)
公式中,pM2、pM1分別代表距離點(diǎn),pB2、pB1代表實(shí)際位置的參數(shù)點(diǎn)。
將兩點(diǎn)之間的距離誤差與位置誤差關(guān)系表示為:
(10)
公式中,dp代表在基礎(chǔ)坐標(biāo)系中某一點(diǎn)的位置偏差向量。
上述計(jì)算的誤差中不包含位移信息,這會(huì)導(dǎo)致計(jì)算模型出現(xiàn)復(fù)共線性特征,導(dǎo)致原始辨識(shí)矩陣發(fā)生錯(cuò)誤,為此在上述計(jì)算的基礎(chǔ)上設(shè)置約束條件,將計(jì)算公式表示為:
Δex,2=Δey,d=Δey,3=0
(11)
公式中,Δex,2、Δey,d、Δey,3分別代表位置向量。
經(jīng)過上述計(jì)算保證辨識(shí)矩陣滿秩,將無偏估計(jì)公式表示為:
(12)
公式中,H*代表偽逆矩陣。
上述計(jì)算中,通過H的選擇能夠使模型包含充足的解釋信息并能夠應(yīng)對(duì)計(jì)算模型中的共線性特征,從而利用較少的數(shù)據(jù)對(duì)位置的末端誤差測(cè)量。
2.2 定向測(cè)量位形優(yōu)選
增加位形測(cè)量參數(shù),以提高后續(xù)傾斜角校準(zhǔn)誤差補(bǔ)償?shù)男Ч埐罹礁挠?jì)算公式表示為:
(13)
公式中,SEy為轉(zhuǎn)角在任意一個(gè)位形下的測(cè)量誤差函數(shù),fE代表任意一個(gè)位形下的誤差預(yù)估函數(shù)。
通過上述計(jì)算能夠?qū)δ┒苏`差估計(jì)值與真實(shí)值之間的差距進(jìn)行反映,但是由于實(shí)際計(jì)算中位移誤差值會(huì)隨著真實(shí)位移發(fā)生變化,為此需要進(jìn)一步對(duì)隨機(jī)誤差測(cè)量,將殘差比例指標(biāo)定義為:
(14)
進(jìn)行測(cè)量的殘差分析,將公式表示為:
ηE,x[fc]={ηE,y|fC=[fC]}
(15)
公式(13)中,fC代表計(jì)算過程中的累積頻率,[fC]代表預(yù)先給定的置信度水平,ηE,y代表殘差比例。
通過上述計(jì)算對(duì)測(cè)量位形優(yōu)選,并對(duì)末端位姿測(cè)量,提高辨識(shí)方法的魯棒性。
2.3 傾斜角校準(zhǔn)誤差補(bǔ)償
若想進(jìn)行參數(shù)標(biāo)定需要對(duì)傳感器傾斜角校準(zhǔn)誤差補(bǔ)償,加速度誤差模型如(6)式所示:
(16)
矩陣中,fa、fb、fc分別為三軸加速度的輸出值,m1、m2、…、mnm分別代表誤差模型建立中的相互交叉影響系數(shù),pa、pb、pc分別代表傳感器中加速度非線性誤差系數(shù)。
在加速度傾斜角校準(zhǔn)誤差補(bǔ)償中,為了增加加速度非線性誤差系數(shù),提高標(biāo)定精度,對(duì)陀螺傳感器傾斜角校準(zhǔn)誤差進(jìn)行補(bǔ)償,該精度決定了系統(tǒng)的跟蹤精度,定向鉆機(jī)液壓系統(tǒng)的傾斜角校準(zhǔn)誤差補(bǔ)償?shù)挠?jì)算公式表示為:
(17)
公式中,λi、λj分別代表待辨識(shí)的參數(shù),p代表空間降維參數(shù),參考公式(1)和公式(11),將誤差補(bǔ)償模型表示為:
(18)
2.4 運(yùn)動(dòng)學(xué)參數(shù)標(biāo)定
按時(shí)間順序進(jìn)行一系列采樣,每一個(gè)采樣值之間都有一定的相關(guān)性,時(shí)間序列分析模型通過對(duì)這些數(shù)據(jù)建模,挖掘出序列間存在的規(guī)律,使其反映系統(tǒng)靜態(tài)輸出特性,獲得運(yùn)動(dòng)學(xué)參數(shù)變化規(guī)律,表示為:
V=?1xk-1+?2xk-2+ak-θ1ak-1
(19)
公式(19)中,?1、?2分別代表時(shí)間差序列,xk-1、xk-2分別代表靜態(tài)輸出參數(shù),ak代表自然回歸參數(shù),θ1代表滑動(dòng)平均參數(shù)。
在此基礎(chǔ)上,將卡爾曼濾波方法應(yīng)用到其中,以遞推形式描述定向鉆機(jī)液壓系統(tǒng)穩(wěn)態(tài)方程,表示為:
X(k)=A(u-1)+BW(u)
(20)
公式(20)中,u代表液態(tài)系統(tǒng)的動(dòng)力學(xué)參數(shù),B代表噪聲參數(shù),A代表系統(tǒng)動(dòng)態(tài)參數(shù),W代表隨機(jī)誤差參數(shù)。
將計(jì)算結(jié)果與穩(wěn)態(tài)響應(yīng)參數(shù)進(jìn)行對(duì)比,對(duì)狀態(tài)向量最優(yōu)值估計(jì),估計(jì)過程如下:
(21)
公式(21)中,AJ代表第J個(gè)參數(shù)的狀態(tài)向量最優(yōu)估計(jì)值,Ak-1代表第k步的狀態(tài)方程。
以此增加位形測(cè)量參數(shù),反映末端誤差估計(jì)值與真實(shí)值之間的差距,將殘差比例指標(biāo)應(yīng)用到優(yōu)選中,動(dòng)態(tài)地獲取殘差比例指標(biāo),狀態(tài)向量最優(yōu)值越低,運(yùn)動(dòng)學(xué)參數(shù)標(biāo)定效果越好,實(shí)現(xiàn)定向鉆機(jī)液壓系統(tǒng)運(yùn)動(dòng)學(xué)參數(shù)標(biāo)定。
3 實(shí)驗(yàn)對(duì)比
為驗(yàn)證定向鉆機(jī)液壓系統(tǒng)運(yùn)動(dòng)學(xué)參數(shù)標(biāo)定技術(shù)的應(yīng)用效果,進(jìn)行實(shí)驗(yàn),并將新型礦用鉆機(jī)開孔定向儀的標(biāo)定及誤差補(bǔ)償技術(shù)、基于無量綱化辨識(shí)雅可比矩陣的標(biāo)定方法與所研究方法進(jìn)行對(duì)比。
3.1 實(shí)驗(yàn)準(zhǔn)備
此次研究應(yīng)用到的定向鉆機(jī)主要技術(shù)參數(shù)如表1所示。
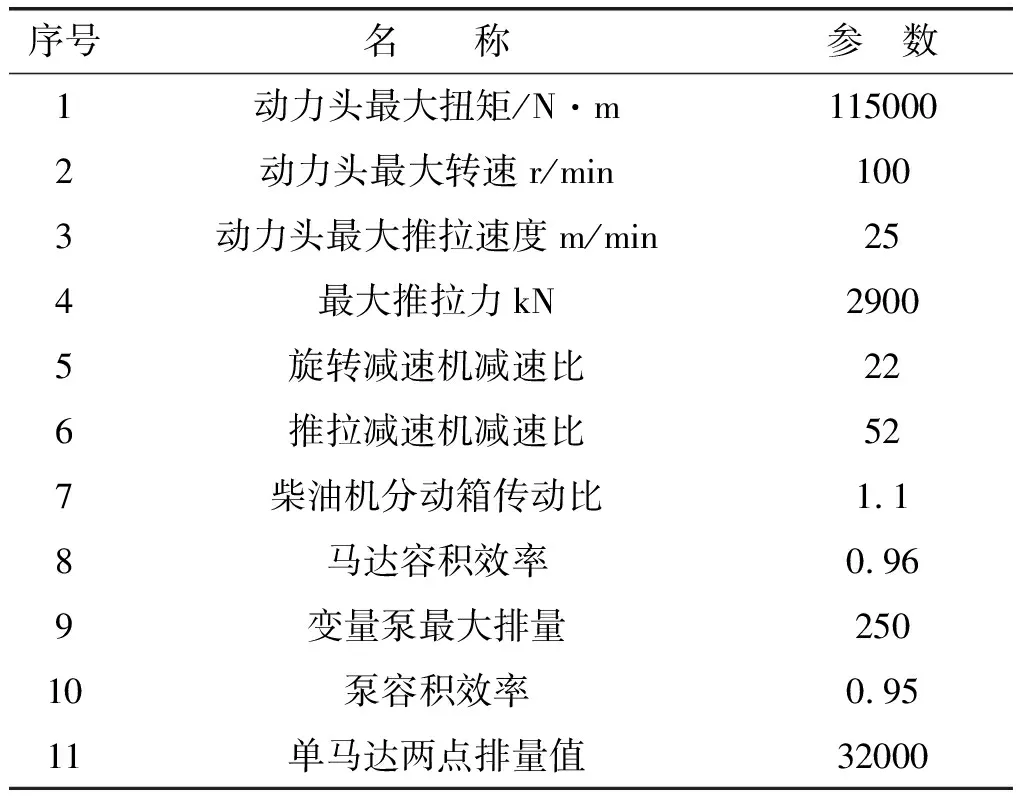
表1 實(shí)驗(yàn)定向鉆機(jī)主要技術(shù)參數(shù)
在實(shí)驗(yàn)過程中,將鉆桿旋轉(zhuǎn)速度、最大回拖參數(shù)與最大回推力、最大輸出扭矩4個(gè)參數(shù)作為主要的實(shí)驗(yàn)數(shù)據(jù)。
3.2 鉆桿旋轉(zhuǎn)速度分析
對(duì)比此次研究提出的定向鉆機(jī)液壓系統(tǒng)運(yùn)動(dòng)學(xué)參數(shù)標(biāo)定技術(shù)與其他兩種技術(shù)的鉆桿旋轉(zhuǎn)速度標(biāo)定結(jié)果,如圖1所示。
圖1中,標(biāo)定結(jié)果與實(shí)際值具有一定的差距,且差距較大。
3.3 最大回拖參數(shù)分析
此實(shí)驗(yàn)中,測(cè)定距離為2 m,測(cè)定回拖速度,三種方法的測(cè)定結(jié)果與實(shí)際值對(duì)比結(jié)果如圖2所示。
圖2中,在測(cè)定最大回拖參數(shù)上,所提出的標(biāo)定技術(shù)也獲得了效果較好的標(biāo)定結(jié)果,與實(shí)際值相差較小。而其他兩種方法與實(shí)際結(jié)果具有一定的差距,標(biāo)定效果較差。
3.4 最大回推力分析
三種方法最大回推力參數(shù)標(biāo)定結(jié)果如圖3所示。
圖3中,在測(cè)定的幾個(gè)時(shí)間內(nèi),三種方法最大回推力參數(shù)標(biāo)定結(jié)果與實(shí)際值相差都不是很大,在此部分標(biāo)定中,應(yīng)用效果較好。
3.5 最大輸出扭矩分析
三種方法與實(shí)際的最大輸出扭矩分析結(jié)果如圖4所示。
圖4中,在前幾分鐘測(cè)試上,所提出方法與其他兩種方法最大輸出扭矩的標(biāo)定結(jié)果與實(shí)際值相差較小,隨著時(shí)間的增多,其他兩種方法測(cè)定誤差逐漸增大,與實(shí)際值相差較大。
4 結(jié)束語(yǔ)
研究市政工程用定向鉆機(jī)液壓系統(tǒng)運(yùn)動(dòng)學(xué)參數(shù)標(biāo)定技術(shù),將參數(shù)標(biāo)定細(xì)化為測(cè)量位形優(yōu)選與傾斜角校準(zhǔn)誤差補(bǔ)償兩方面,構(gòu)建定向鉆機(jī)液壓系統(tǒng)動(dòng)力學(xué)模型和傾斜角校準(zhǔn)誤差模型,重點(diǎn)分析系統(tǒng)的動(dòng)態(tài)特性,即以系統(tǒng)的靜力荷載,作為載荷線性結(jié)構(gòu)穩(wěn)態(tài)響應(yīng)情況,增加位形測(cè)量參數(shù),結(jié)合諧響應(yīng)過程的非線性特征與系統(tǒng)固有頻率,估計(jì)狀態(tài)向量最優(yōu)值,獲取運(yùn)動(dòng)學(xué)參數(shù)標(biāo)定效果,有效提高了標(biāo)定的準(zhǔn)確性,在實(shí)際工程中有著較好的應(yīng)用效果。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
