基于復(fù)合預(yù)測(cè)的LCL型光伏逆變器無(wú)差拍控制
2022-09-03 05:53:42李圣清姚鑫馮浩田張棟唐昕昀
湖南電力 2022年4期
關(guān)鍵詞:系統(tǒng)
李圣清,姚鑫,馮浩田,張棟, 唐昕昀
(1.湖南工業(yè)大學(xué)電氣與信息工程學(xué)院,湖南 株洲412007;2.光伏微電網(wǎng)智能控制技術(shù)湖南省工程研究中心,湖南株洲412007)
0 引言
光伏并網(wǎng)的諧振抑制控制方法一直是限制太陽(yáng)能發(fā)電發(fā)展的重要問(wèn)題之一。無(wú)差拍控制作為諧振抑制的重要控制方法,因其動(dòng)態(tài)響應(yīng)好,諧振抑制的頻率范圍廣,控制速度快而廣受關(guān)注[1-3]。
傳統(tǒng)無(wú)差拍控制在理想狀態(tài)下可實(shí)現(xiàn)無(wú)差拍控制,但是在實(shí)際工程應(yīng)用中,受到時(shí)間延時(shí)和預(yù)測(cè)精度的影響,其控制效果有所降低[4]。文獻(xiàn)[5-7]通過(guò)引入PI+重復(fù)控制來(lái)抑制并網(wǎng)諧振,PI控制能夠在諧振發(fā)生時(shí)快速動(dòng)作,并且能夠隨系統(tǒng)頻率的變化而變化,可以動(dòng)態(tài)控制,操作性強(qiáng),提高了逆變器的抗擾動(dòng)能力,但是其帶寬較窄,動(dòng)態(tài)響應(yīng)較差,諧振抑制效果不佳。文獻(xiàn)[8-9]引入傳統(tǒng)無(wú)差拍控制解決了PI控制的帶寬和動(dòng)態(tài)響應(yīng)問(wèn)題,能提前預(yù)測(cè)諧振頻率并進(jìn)行諧振抑制,降低穩(wěn)態(tài)誤差,大大提高了系統(tǒng)運(yùn)行的穩(wěn)定性,但是傳統(tǒng)無(wú)差拍控制的電流預(yù)測(cè)精度不高,控制存在延時(shí)問(wèn)題,不利于諧振的控制。文獻(xiàn)[10-11]在傳統(tǒng)無(wú)差拍控制的基礎(chǔ)上進(jìn)行改進(jìn),解決了傳統(tǒng)無(wú)差拍控制系統(tǒng)延時(shí)的問(wèn)題,進(jìn)一步加強(qiáng)了諧振抑制的效果,但是其預(yù)測(cè)電流通過(guò)公式推導(dǎo)出來(lái),預(yù)測(cè)精度不高,誤差偏大。文獻(xiàn)[12-14]使用拉格朗日插值法提高重復(fù)預(yù)測(cè)的電流精度,在負(fù)載穩(wěn)定時(shí)諧振抑制效果較好,諧波含量降低了90%,但是其預(yù)測(cè)方法在負(fù)載變化時(shí),系統(tǒng)振蕩時(shí)間較長(zhǎng),諧振效果會(huì)降低很多。文獻(xiàn)[15]使用復(fù)合預(yù)測(cè)改進(jìn)無(wú)差拍控制方法,縮短了系統(tǒng)振蕩時(shí)間,在負(fù)載變化或穩(wěn)定的時(shí)候都能抑制諧振,但是其預(yù)測(cè)精度偏低,需要進(jìn)一步提高。
綜上所述,以上文獻(xiàn)均沒(méi)有兼顧延時(shí)問(wèn)題和不同負(fù)載情況下的電流預(yù)測(cè)精度問(wèn)題。本文在傳統(tǒng)無(wú)差拍控制的基礎(chǔ)上,對(duì)采樣電流再提前一個(gè)周期進(jìn)行預(yù)測(cè)來(lái)解決時(shí)間延時(shí)的問(wèn)題,并且通過(guò)以拉格朗日插值法為核心的重復(fù)預(yù)測(cè)和自適應(yīng)前向線性電流預(yù)測(cè)相結(jié)合的復(fù)合預(yù)測(cè)方法來(lái)提高負(fù)載不同情況下的電流預(yù)測(cè)精度,縮短系統(tǒng)振蕩時(shí)間,提高諧振抑制效果,最后通過(guò)仿真來(lái)檢驗(yàn)該策略的可行性與優(yōu)越性。
1 光伏并網(wǎng)系統(tǒng)模型及其分析
1.1 光伏并網(wǎng)系統(tǒng)結(jié)構(gòu)分析
光伏逆變器的并網(wǎng)結(jié)構(gòu)如圖1所示。圖中光伏并網(wǎng)系統(tǒng)由光伏前級(jí)、逆變環(huán)節(jié)和濾波環(huán)節(jié)組成。U1、U2、U3為逆變器輸出電壓,L11、L12為濾波環(huán)節(jié)的三相電感,C11為濾波環(huán)節(jié)的三相電容;Lg為網(wǎng)側(cè)電感,Rg為網(wǎng)側(cè)阻抗,Upcc為并網(wǎng)公共點(diǎn),其他逆變器的結(jié)構(gòu)與逆變器1類(lèi)似。光伏板的電流經(jīng)過(guò)光伏前級(jí)進(jìn)行DC-DC變換后進(jìn)入逆變環(huán)節(jié)變?yōu)榻涣麟姡?jīng)過(guò)LCL濾波器后通過(guò)UPCC并入電網(wǎng)。
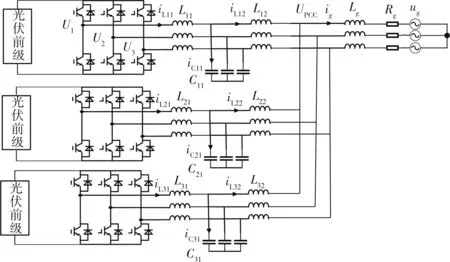
圖1 光伏并網(wǎng)系統(tǒng)結(jié)構(gòu)
1.2 光伏逆變器諧振分析
以單臺(tái)逆變器為例進(jìn)行分析,單臺(tái)逆變器在并網(wǎng)過(guò)程中,系統(tǒng)可簡(jiǎn)化為一個(gè)諾頓等效電路,其等效電路如圖2所示。

圖2 單臺(tái)逆變器諾頓等效電路
由圖2得出G1及Y1的傳遞函數(shù)為:
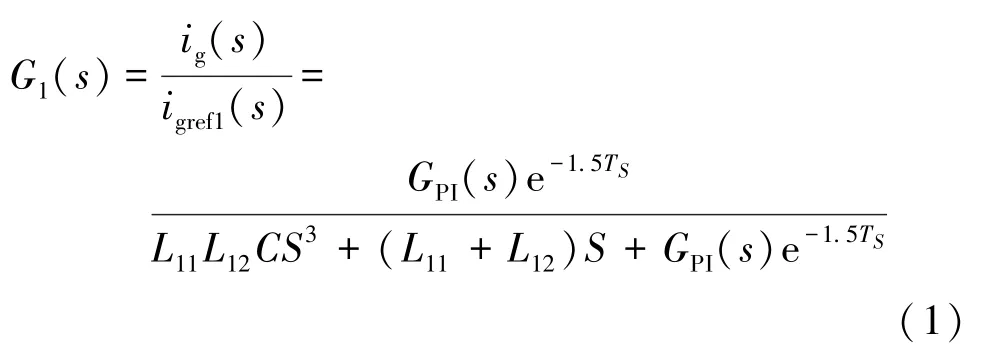
式中,GPI(s)=kp+ki/S;TS為采樣周期。
多個(gè)單臺(tái)逆變器并聯(lián)構(gòu)成了逆變器并網(wǎng)系統(tǒng),因此并網(wǎng)系統(tǒng)傳遞函數(shù)可由單臺(tái)逆變器推導(dǎo)出來(lái),其等效電路如圖3所示。
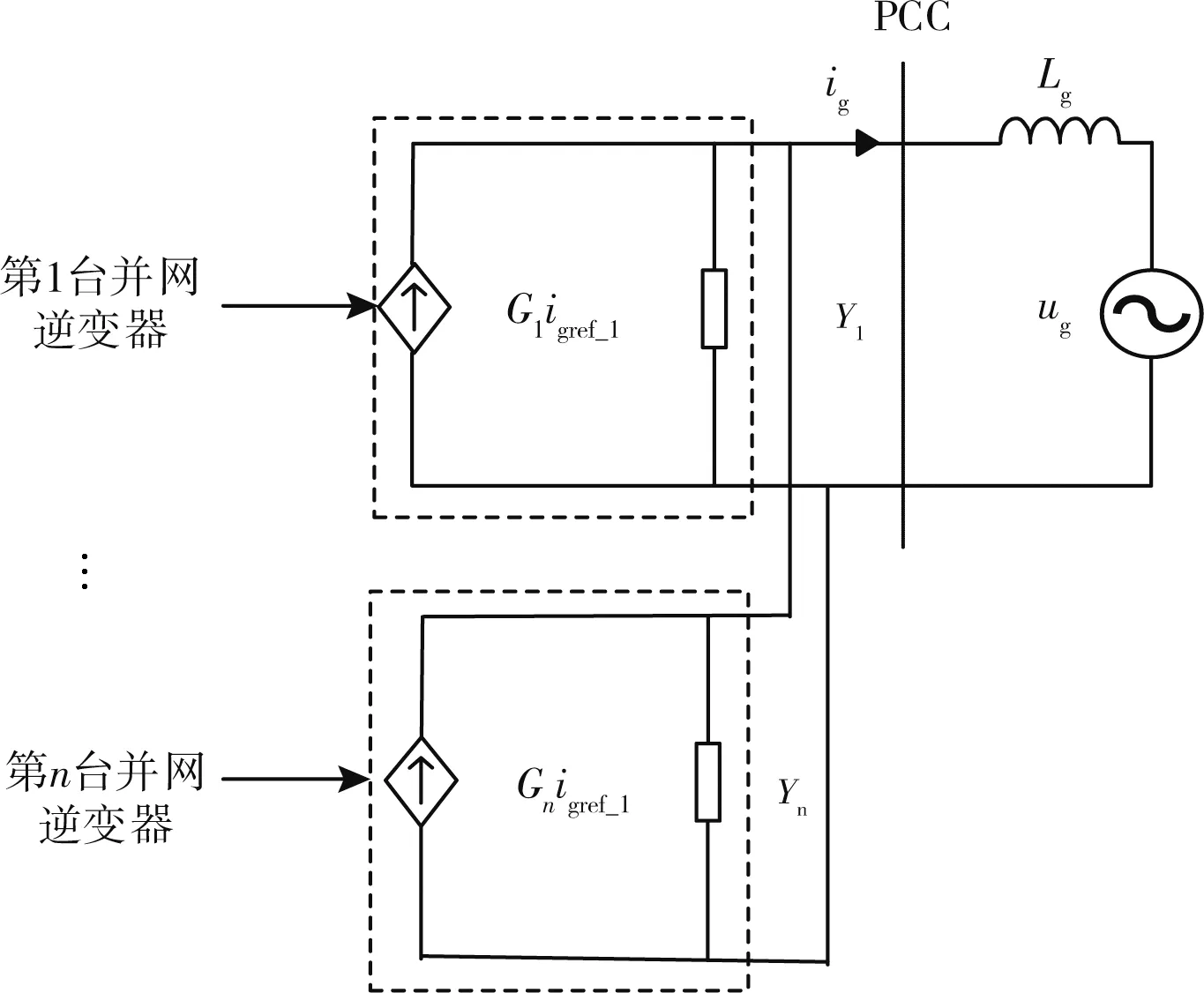
圖3 多臺(tái)逆變器諾頓等效電路
由圖3和式(1)可以推出n臺(tái)逆變器并聯(lián)的并網(wǎng)發(fā)電系統(tǒng)傳遞函數(shù)為:
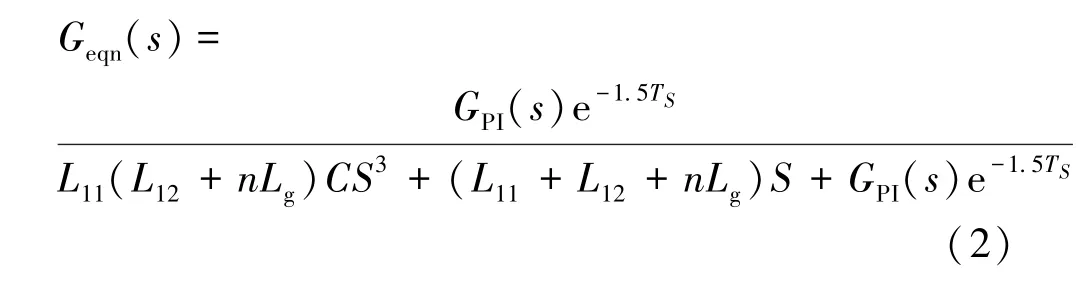
依據(jù)式(2)可得n臺(tái)逆變器并網(wǎng)系統(tǒng)諧振頻率為:

由式(3)可知,隨著逆變器并聯(lián)臺(tái)數(shù)的增加,諧振頻率在逐漸降低,其諧振點(diǎn)也在增加。
2 傳統(tǒng)無(wú)差拍控制
對(duì)圖1運(yùn)用基爾霍夫電壓定律,可得出其電壓回路方程:
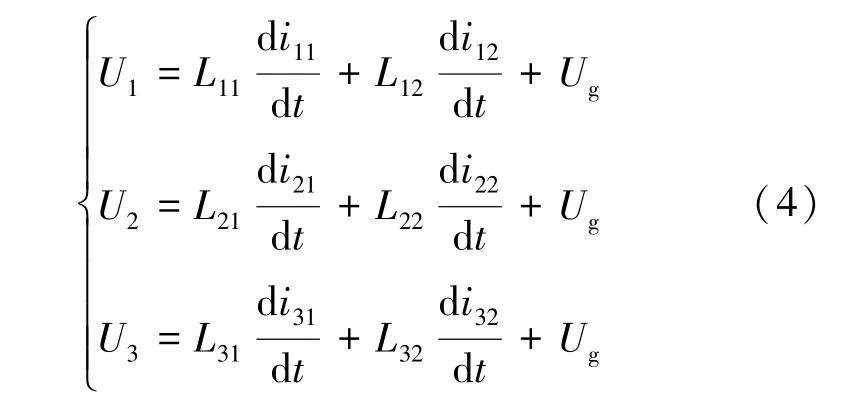
式中,U1為第一臺(tái)逆變器的輸出電壓;L11和L22為濾波器的電感;Ug為電網(wǎng)電壓。
對(duì)式(4)進(jìn)行離散化可得:
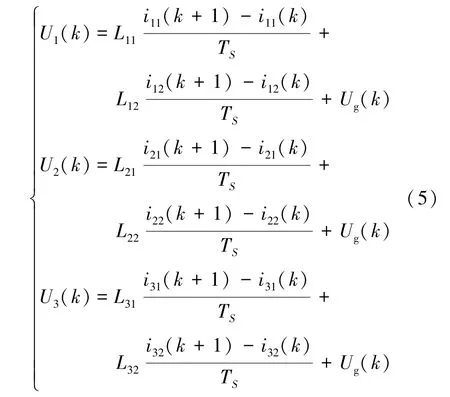
式中,i11為逆變器側(cè)濾波電感電流;i12為網(wǎng)側(cè)濾波電感電流;i11(k+1)為下一時(shí)刻的逆變器側(cè)濾波電感參考電流;i12(k+1)為下一時(shí)刻的網(wǎng)側(cè)濾波電感參考電流;TS為采樣周期。
理想狀態(tài)下,實(shí)際電流可實(shí)現(xiàn)對(duì)參考電流的無(wú)靜差追蹤,即i11(k+1)=i11(k)?,代入式(5)中可得:
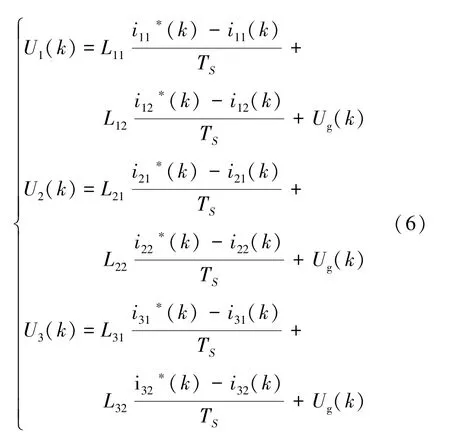
由式(6)可以看出,理想狀態(tài)下的無(wú)差拍控制確實(shí)可以實(shí)現(xiàn)對(duì)逆變器電流的提前預(yù)測(cè)和控制,但是在實(shí)際工程應(yīng)用中,電流的采樣、計(jì)算及預(yù)測(cè)信號(hào)發(fā)出都需要時(shí)間,理想狀態(tài)下的無(wú)差拍控制在實(shí)際應(yīng)用中就變成了“有差拍控制”,諧振抑制效果變差,動(dòng)態(tài)響應(yīng)較差。對(duì)傳統(tǒng)無(wú)差拍控制進(jìn)行延時(shí)分析,其延時(shí)如4圖所示。
由圖4可知,由于采樣、計(jì)算及輸出信號(hào)的延時(shí),到第n+1周期前一段時(shí)間才輸出第n個(gè)周期控制的信號(hào),整個(gè)控制信號(hào)延時(shí)將近一個(gè)周期,在實(shí)際工程應(yīng)用中控制效果較差,需要進(jìn)行改進(jìn)。
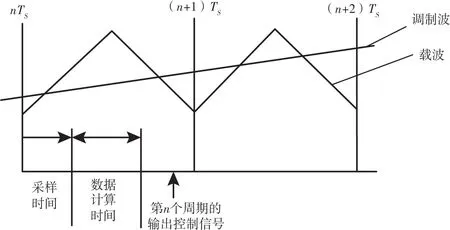
圖4 傳統(tǒng)無(wú)差拍控制的延時(shí)
3 基于復(fù)合預(yù)測(cè)的改進(jìn)型無(wú)差拍控制
3.1 k+1時(shí)刻逆變器電流預(yù)測(cè)
要提前兩個(gè)周期對(duì)逆變器輸出電流進(jìn)行預(yù)測(cè),首先要根據(jù)第k個(gè)周期的逆變器輸出電流采樣值推算出第k+1個(gè)周期的輸出電流,再根據(jù)k+1周期的輸出電流計(jì)算出k+2周期的電流參考值,所以需要計(jì)算的值有兩個(gè),一個(gè)是逆變器輸出電流預(yù)測(cè),另一個(gè)是參考電流預(yù)測(cè)。在
實(shí)際采樣的過(guò)程中,電網(wǎng)電壓頻率往往會(huì)小于采樣頻率。根據(jù)這一特性,逆變器輸出電流的變化可以看成是線性增長(zhǎng),忽略系統(tǒng)電容的影響,則k+1時(shí)刻逆變器的預(yù)測(cè)電流為:

式中,i1(k)、i1(k+1)為k、k+1時(shí)刻的逆變器輸出電流值;i1?(k)、i1?(k+1)為k、k+1時(shí)刻的輸出電流參考值;(k+1)為k+1時(shí)刻的輸出電流預(yù)測(cè)值;為k+1時(shí)刻的輸出電流預(yù)測(cè)參考值。
對(duì)式(7)化簡(jiǎn)有:
3.2 k+2時(shí)刻基于拉格朗日差值法的重復(fù)預(yù)測(cè)
k+2時(shí)刻的參考電流預(yù)測(cè)要在k+1時(shí)刻的逆變器輸出電流預(yù)測(cè)的基礎(chǔ)上進(jìn)行,在實(shí)際工程應(yīng)用中,由于負(fù)載時(shí)刻發(fā)生變化,單一的電流預(yù)測(cè)方法無(wú)法滿(mǎn)足精度要求,所以采用復(fù)合預(yù)測(cè)來(lái)提高電流預(yù)測(cè)精度。
當(dāng)負(fù)載處于穩(wěn)態(tài)運(yùn)行時(shí),輸出電流波動(dòng)較小,具有周期性,此時(shí)采用重復(fù)預(yù)測(cè)可提高預(yù)測(cè)的精度。其k+2時(shí)刻的逆變器輸出預(yù)測(cè)參考電流為:

重復(fù)預(yù)測(cè)同樣存在誤差。當(dāng)?shù)趉-2、k-1、k個(gè)時(shí)刻的采樣值存在誤差時(shí),勢(shì)必會(huì)影響k+2時(shí)刻電流參考值。因此,必須對(duì)式(9)進(jìn)行重復(fù)補(bǔ)償,補(bǔ)償過(guò)后的表達(dá)式為:

式中,Vi為重復(fù)補(bǔ)償量,Vi=A(1+0.95z-N)·e(k)z2-N;A為重復(fù)控制器增益;e(k)為重復(fù)控制第k個(gè)周期的指令值和預(yù)測(cè)指令值誤差,e(k)=為一個(gè)周期內(nèi)的采樣次數(shù)。
3.3 自適應(yīng)前向線性電流預(yù)測(cè)
當(dāng)負(fù)載運(yùn)行不穩(wěn)定時(shí),由于重復(fù)預(yù)測(cè)的動(dòng)態(tài)性能較差,不能很好地應(yīng)對(duì)系統(tǒng)電流的變化進(jìn)行預(yù)測(cè)。因此,采用動(dòng)態(tài)性能較好的自適應(yīng)前向線性電流預(yù)測(cè)。
以?xún)蓚€(gè)周期為間隔對(duì)前向電流進(jìn)行采樣,其采樣值為x(0),x(1),...x(k-m)...,x(k-1),...,令:
則前向電流線性預(yù)測(cè)和其誤差值為:
式(12)和(13)中,(k)為預(yù)測(cè)值;x(k)為真值;amn為線性預(yù)測(cè)系數(shù);emk為預(yù)測(cè)誤差。
對(duì)預(yù)測(cè)誤差使用Levinson-Durbin算法可得到更新方程和最小誤差:

式(14)和(15)中,km為反射系數(shù)。(k)對(duì)于前向線性電流預(yù)測(cè)而言,其階數(shù)會(huì)影響誤差大小和計(jì)算量,階數(shù)越高,計(jì)算量越大,誤差也越小,結(jié)合設(shè)計(jì)的實(shí)際情況,選取階數(shù)為8。
3.4 復(fù)合預(yù)測(cè)
復(fù)合預(yù)測(cè)的實(shí)質(zhì)就是依據(jù)負(fù)載的不同情況,選取不同的預(yù)測(cè)方法,提高預(yù)測(cè)精度。當(dāng)負(fù)載平穩(wěn)運(yùn)行時(shí),采用拉格朗日二階插值的重復(fù)預(yù)測(cè);當(dāng)負(fù)載振蕩運(yùn)行時(shí),采用自適應(yīng)前向電流預(yù)測(cè)。其判斷表達(dá)式為:

式(16)中,ejudd(k)為相鄰兩個(gè)周期的電流指令值的差值絕對(duì)值。通過(guò)給系統(tǒng)設(shè)置一個(gè)最大誤差emax,只要檢測(cè)到ejudd(k)大于emax,便可判斷為系統(tǒng)振蕩運(yùn)行,自動(dòng)切換至前向線性電流預(yù)測(cè)。
當(dāng)判斷系統(tǒng)穩(wěn)定運(yùn)行時(shí),只判斷相鄰兩個(gè)周期的差值不能滿(mǎn)足要求,因此要選取多個(gè)周期進(jìn)行判斷,當(dāng)選取的周期過(guò)多時(shí),計(jì)算量變大,計(jì)算誤差值會(huì)變小,結(jié)合實(shí)際情況,選取單次穩(wěn)定判斷的周期數(shù)為8個(gè)。其判斷表達(dá)式為:
同樣給系統(tǒng)設(shè)置一個(gè)最小誤差emin,只要連續(xù)檢測(cè)到8個(gè)周期的ejudd(k)小于emin,便可判定系統(tǒng)為穩(wěn)定運(yùn)行。采用重復(fù)預(yù)測(cè),其復(fù)合預(yù)測(cè)的流程如圖5所示。
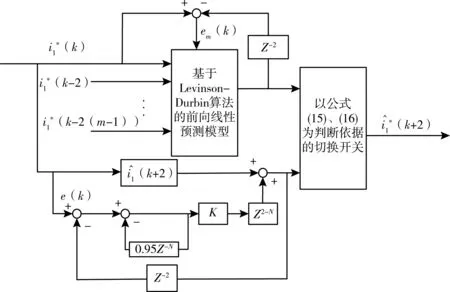
圖5 復(fù)合預(yù)測(cè)流程
4 仿真分析
為驗(yàn)證復(fù)合預(yù)測(cè)改進(jìn)型無(wú)差拍控制的有效性與優(yōu)越性,在Matlab/Simulink軟件平臺(tái)搭建含有兩臺(tái)逆變器的光伏發(fā)電系統(tǒng)模型,以第1臺(tái)為例進(jìn)行分析,其結(jié)構(gòu)如圖1所示,具體參數(shù)見(jiàn)表1。

表1 仿真參數(shù)
仿真結(jié)果如圖6—8所示,圖6(a)、(b)為傳統(tǒng)無(wú)差拍輸出諧波電流圖及其總諧波失真圖,圖7(a)、(b)為負(fù)載穩(wěn)定時(shí)兩種重復(fù)預(yù)測(cè)諧波電流圖,圖8(a)、(b)、(c)分別為負(fù)載變化時(shí)拉格朗日電流波形圖、復(fù)合預(yù)測(cè)電流波形圖及其總諧波失真圖。
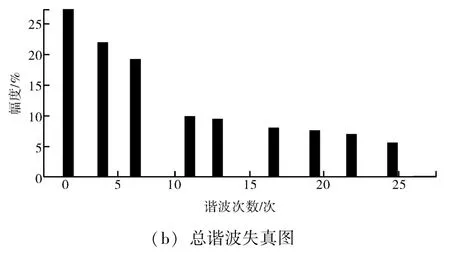
圖6 傳統(tǒng)無(wú)差拍控制結(jié)果
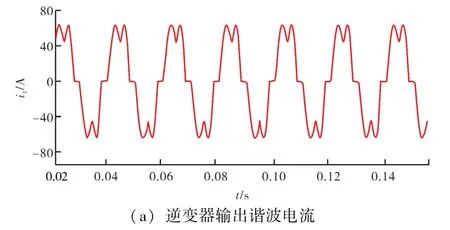
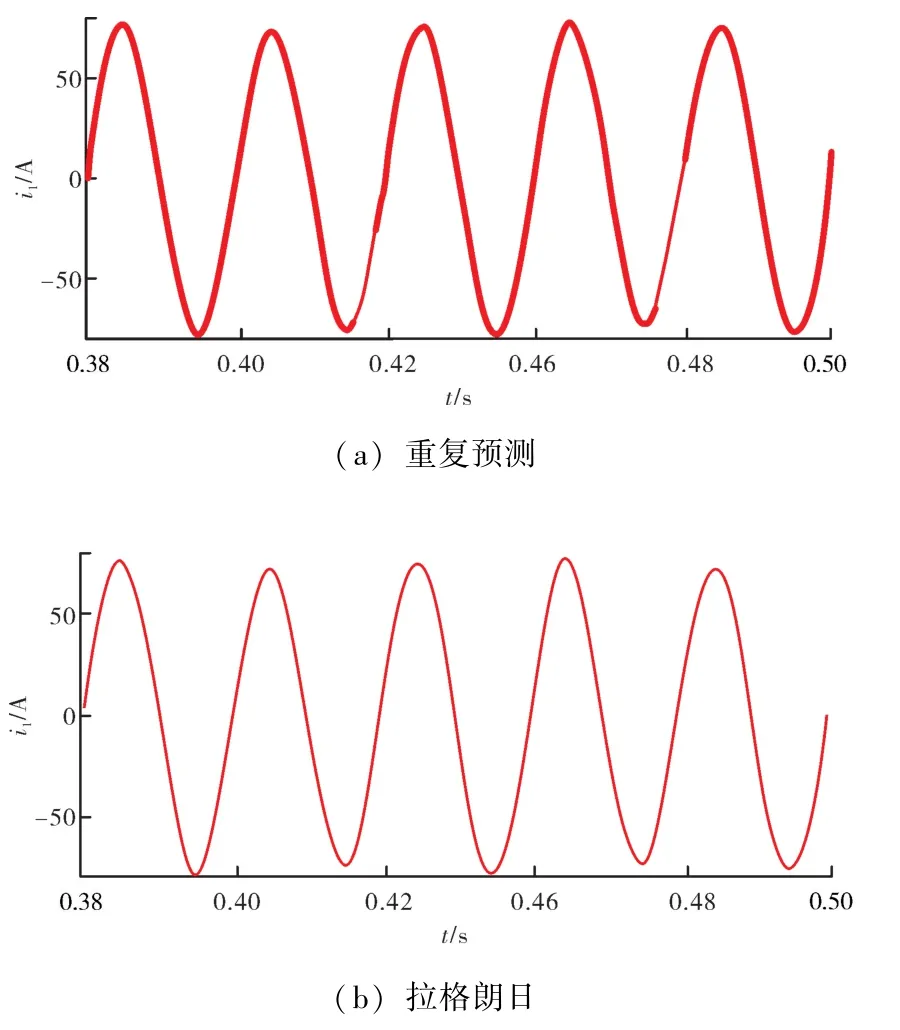
圖7 負(fù)載穩(wěn)定時(shí)兩種重復(fù)預(yù)測(cè)諧波電流
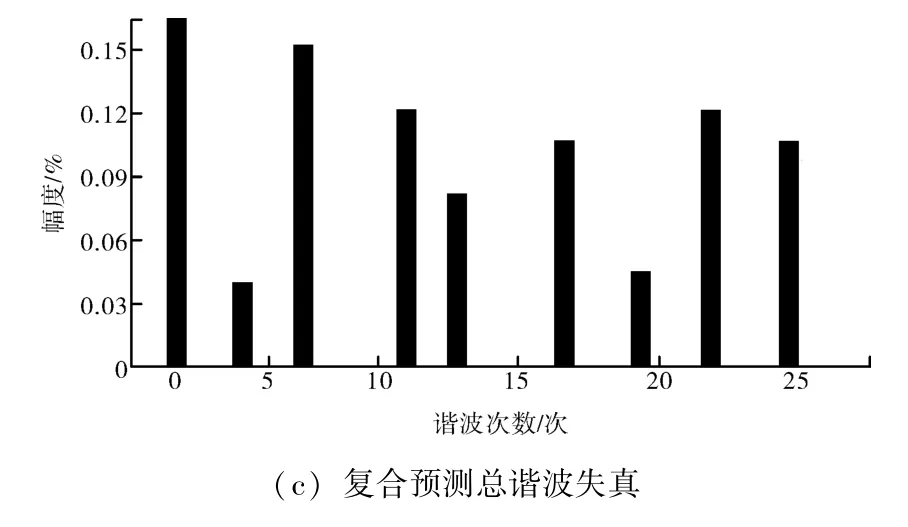
圖8 負(fù)載變化時(shí)兩種預(yù)測(cè)方法諧波電流圖和THD圖

由圖6—8可知,傳統(tǒng)無(wú)差拍控制由于其延時(shí)和控制精度問(wèn)題,電流波形畸變嚴(yán)重,諧波含量較高,達(dá)到了28.51%,諧振抑制效果較差;在負(fù)載穩(wěn)定時(shí)采用重復(fù)預(yù)測(cè),電流波形畸變的程度大幅減輕,諧波含量也大幅下降,尤其是采用拉格朗日法提高重復(fù)預(yù)測(cè)精度后,諧波電流波形更加光滑,諧振抑制效果更好;當(dāng)負(fù)載變化時(shí),重復(fù)預(yù)測(cè)需要經(jīng)過(guò)兩個(gè)周期的振蕩,電流才能恢復(fù)穩(wěn)定,而采用復(fù)合預(yù)測(cè)則只需要一個(gè)周期,大大提高了系統(tǒng)的動(dòng)態(tài)響應(yīng)能力,并且諧波含量為2.35%,滿(mǎn)足諧波含量不超過(guò)5%的要求,諧振抑制效果更佳。
5 結(jié)語(yǔ)
針對(duì)傳統(tǒng)無(wú)差拍控制的時(shí)間延時(shí)和控制精度不高的問(wèn)題,引入一種基于復(fù)合預(yù)測(cè)的改進(jìn)型無(wú)差拍控制策略。該策略通過(guò)預(yù)測(cè)k+1時(shí)刻的逆變器輸出電流和k+2時(shí)刻的采樣輸出參考電流,解決了傳統(tǒng)無(wú)差拍控制延時(shí)問(wèn)題,并使用以拉格朗日插值法為核心的重復(fù)預(yù)測(cè)和自適應(yīng)前向線性電流預(yù)測(cè)相結(jié)合的復(fù)合預(yù)測(cè)方法,在負(fù)載穩(wěn)定或波動(dòng)的時(shí)候均可提高電流預(yù)測(cè)精度。仿真結(jié)果表明,該策略諧振抑制效果良好,不管是負(fù)載穩(wěn)定運(yùn)行還是振蕩運(yùn)行,諧振抑制效果都比較穩(wěn)定,驗(yàn)證了控制策略的有效性和優(yōu)越性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
