基于隨機抽樣一致算法的水深反演技術研究
2022-09-01 15:40:30黃文騫程益鋒朱立波
科技創新與應用 2022年24期
關鍵詞:模型
白 龍,黃文騫,程益鋒,朱立波
(1.海軍大連艦艇學院,遼寧 大連 116018;2.91351 部隊,遼寧 興城 125106)
掌握島礁附近海域水深信息對船只安全航行有重要意義。傳統的船載單波束、多波束測深技術發展成熟,測深精度高,得到了廣泛應用。20 世紀60 年代以來,遙感衛星和計算機技術飛速發展,被動遙感水深反演具有成本低、探測范圍不受限制等特點,在船只難以到達的島礁附近海域的水深探測中發揮著無可替代的作用。
目前被動遙感水深反演模型發展已經成熟,分為理論解析模型、半理論半經驗模型和統計模型。半理論半經驗模型中的單波段對數線性模型是理論解析模型的簡化,只需要較少的回歸系數就能得到精度較高的水深反演模型[1]。Paredes 等[2]建立的多波段對數線性模型能夠降低海底底質的影響,提高反演精度。Stumpf[3]提出的波段對數比值模型能夠降低水中雜質的影響,反演穩定性明顯提升。黨福星等[4-6]通過底質分類和水深分段等方法進一步提升水深反演精度。大量學者研究表明,將機器學習應用在水深反演領域,其性能在一定程度上優于傳統水深反演模型[7-10]。李麗[11]將趙述島的水深反演模型應用到南島,反演誤差在1.25 m 以內。趙露露等[12]研究了將水深反演模型推廣至無實測數據海域的可行性,結果表明海底地質相同或相近的海域,水深反演模型的推廣性更高。利用在巡航船只上安裝單波束或多波束測深儀,以巡航作業的方式,能夠采集爭議島礁附近海域的少量實測水深數據。由于船只在巡航時獲取的實測水深數據較少,難以構建較準確的水深反演模型。
為了提升爭議島礁附近海域的水深反演精度,本文對隨機抽樣一致算法進行改進。首先利用同一海域其他島礁已有的實測水深數據建立水深反演模型,將得到的模型回歸系數作為隨機抽樣一致算法的初始輸入系數,通過迭代獲取足夠多的局內點后重新建立爭議島礁附近海域的水深反演模型,并對比了基于波段對數比值模型的4 種反演爭議島礁附近海域水深的方法。
1 實驗原理
1.1 最小二乘法
最小二乘法是通過已知的m個觀測數據(xi,yi)(i=1,2,3,…,m),構建如下殘差函數,找到一組ωi(i=1,2,3…m),使殘差函數L取得最小值的曲線擬合方法。

在水深反演實驗中,通常采用最小二乘法建立遙感水深反演模型,并根據此模型反演水深。但是需要反演水深的海域是非建模區域,其反演精度與建模區域相比較低。為了提高水深反演精度,將安裝單波束或多波束測深儀的船只在爭議島礁附近海域巡航時采集的少量實測水深數據與遙感影像數據匹配,得到水深反演觀測數據,再利用觀測數據構建水深反演模型。
利用最小二乘法建立水深反演模型時的數據越多,所建立的模型精度越高,但是船只巡航采集的實測數據較少,抵抗粗差能力差,難以建立精度較高的水深反演模型。為了降低反演誤差,增加水深反演可靠性,需要篩選觀測數據,建立精度更高的水深反演模型。
1.2 改進的隨機抽樣一致算法
隨機抽樣一致算法是采用迭代的方式從一組含有局外點的數據中估計出數學模型參數的方法。與最小二乘法不同的是,隨機抽樣一致算法不是利用所有觀測數據擬合曲線,而是通過迭代,篩選出可靠性較高的觀測數據估計出最優模型。其一般步驟如下。
(1)假設有一個觀測數據子集,是參數化數學模型L1的局內點,即該數學模型參數能夠通過這些局內點擬合得到,隨機選取子集中的N個點來構建數學模型L2,N為模型未知參數個數。
(2)設置一個閾值D,判斷觀測數據與數學模型L2的距離,小于D 的點是適用于模型的局內點,大于D 的點是不適用于模型的局外點。
(3)重復上述2 個步驟,直到獲取的局內點滿足要求,就認為此時建立的模型是最優模型。
隨機抽樣一致算法魯棒性好,即使存在較多局外點也能估計出較準確的模型,適用于利用少量觀測數據建立水深反演模型。本文根據水深反演的特點對隨機抽樣一致算法進行改進。經過遙感影像預處理,有實測數據的島礁附近海域A 和爭議島礁附近海域B 受大氣環境和水體環境影響較小,在海底底質相同或相似的情況下,海域A 與海域B 的水深反演模型回歸系數相近,把海域A的水深反演模型的回歸系數作為隨機抽樣一致算法的初始輸入系數,再結合船只在海域B 獲取的巡航數據進一步優化模型。改進算法步驟如下。
(1)建立海域A 的波段對數比值模型,如公式(2)所示,其中z為水深值,m1,m0,n為回歸系數,L(λ)為波段λ的遙感反射率,將海域A 的回歸系數m1、m0設為隨機抽樣一致算法的初始輸入系數。

(2)設置閾值D,判斷觀測數據是否適用于式(1)中的模型,適用于該模型的為局內點,反之為局外點。
(3)隨機選取局內點中的N個數據重新建立波段對數比值模型,得到模型回歸系數。
(4)重復上述步驟,直到局內點數滿足要求,所得到
模型為海域B 的最優水深反演模型。
2 實驗與分析
2.1 遙感影像數據預處理
本此實驗選取我國浪花礁附近海域為海域A,假定我國甘泉島附近海域為海域B,并模擬船只在海域B 內的一條巡航軌跡上航行,如圖1 所示。分別對2 個島礁的Sentinel-2 遙感影像數據進行水陸分離、太陽耀斑校正[13]和大氣校正[14]后提取像元光譜信息。通過關聯海域A 和海域B 的實測水深數據與對應位置的像元光譜信息,實現遙感影像數據與實測水深數據的匹配,得到海域A 的建模數據和海域B 的觀測數據。
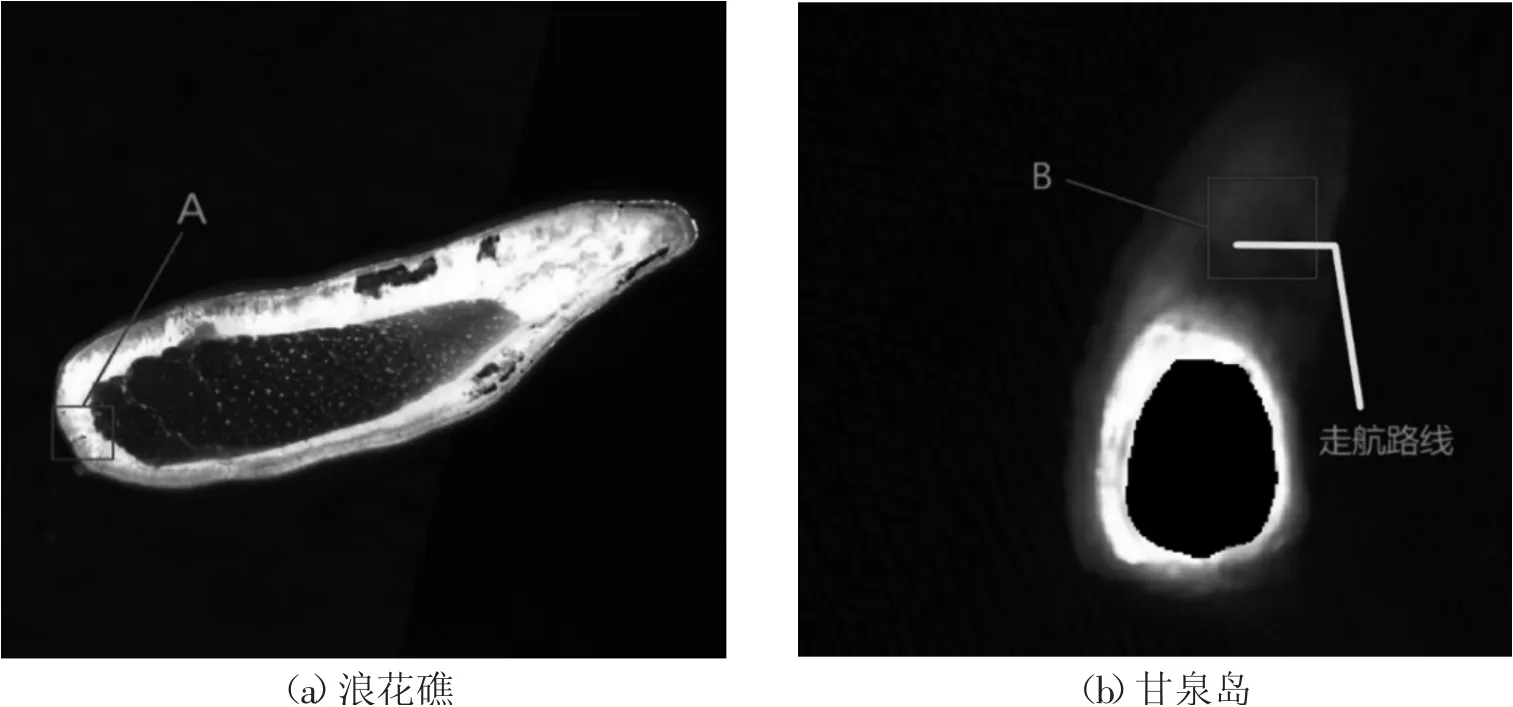
圖1 水深反演實驗區域
2.2 水深反演實驗精度分析
在海域A 建立波段對數比值水深反演模型,將模型回歸系數設為隨機抽樣一致算法的初始輸入系數,隨機選取的子集個數為模型的未知參數個數,閾值D設為1,算法的迭代次數上限K 設為1 000。按照上述改進的隨機抽樣一致算法對海域B 的觀測數據進行篩選,直到選取的局內點數滿足要求,即得到海域B 的最優水深反演模型。
建立平面直角坐標系,縱軸為船只在海域B 巡航獲取的實測水深數據,橫軸為藍綠波段對數比值根據公式(2)和z是線性關系。直線a 為利用最小二乘法擬合得到的和z的線性關系,直線b 為用隨機抽樣一致算法篩選后的數據擬合得到的和
z的線性關系,如圖2 所示。
由圖2 可和,水深大于15 m 的觀測數據存在較多不符合線性關系的局外點。利用最小二乘法擬合得到的模型會受到局外點的影響,而利用改進的隨機抽樣一致算法篩選后的數據擬合得到的模型能夠降低局外點的影響,建立精度較高的水深反演模型。

圖2 2 種擬合方法效果圖
為了體現改進的隨機抽樣一致算法的適用性,對以下4 種反演海域B 水深的方法進行對比:利用在海域A 建立的模型反演海域B 的水深(方法一),利用海域B 的觀測數據建立的模型反演海域B 的水深(方法二),利用改進的隨機抽樣一致算法建立的模型反演海域B 的水深(方法三),利用海域B 的實測水深數據建立的模型反演海域B 的水深(方法四)。方法四是在建模區進行水深反演,精度最高,因此以方法四作為參照標準。
本文精度評價采用平均絕對誤差(MAE)和均方根誤差(RMSE)來評定,結果見表1。為了直觀觀察模型反演效果及偏差,以實測水深值為平面直角坐標系橫軸,反演水深值為平面直角坐標系縱軸,得到反演水深與實測水深的偏離情況,如圖3 所示。
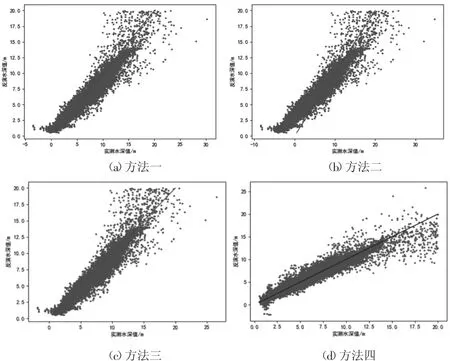
圖3 4 種水深反演方法偏離情況圖
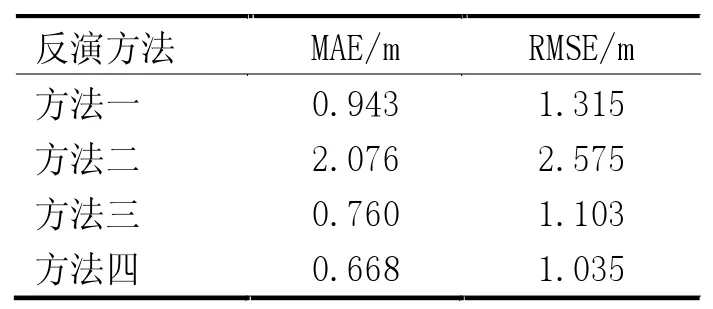
表1 4 種水深反演方法精度對比
從反演數據與實測數據的偏差來看,利用最小二乘法對甘泉島巡航數據擬合得到的模型反演甘泉島附近海域水深和利用浪花礁附近海域的模型反演甘泉島附近海域水深精度較低,與實測數據的偏差較大,而改進的隨機抽樣一致算法能夠降低局外點的影響,利用局內點建立精度較高的水深反演模型,反演甘泉島附近海域水深的精度更高,與實測數據偏差更小,更接近利用甘泉島附近海域實測數據建立模型的反演精度。
3 結論
本文首先建立已有實測水深海域的水深反演模型,將得到的模型參數作為隨機抽樣一致算法的初始參數,通過迭代獲取足夠多的局內點后建立爭議島礁附近海域的水深反演模型,并對比了基于波段對數比值模型的4種反演爭議島礁附近海域水深的方法,結果表明,利用改進的隨機抽樣一致算法優化波段對數比值模型,對巡航船只在爭議島礁附近海域巡航時測得的少量實測水深數據進行篩選,能夠降低觀測數據局外點對水深反演的影響。利用觀測數據局內點建立精度較高的水深反演模型,反演效果優于直接利用最小二乘法對爭議島礁附近海域的少量巡航數據建立的模型反演其海域水深和利用已有實測水深的海域建立模型反演爭議島礁附近海域水深的精度。該方法對船只在爭議島礁附近海域的安全航行有積極作用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
