礦井提升機(jī)恒減速電液制動(dòng)系統(tǒng)仿真分析
2022-09-01 12:30:30劉賀偉趙澤亮何雨絲孫富強(qiáng)
礦山機(jī)械 2022年8期
劉賀偉,趙澤亮,何雨絲,孫富強(qiáng)
洛陽(yáng)中重自動(dòng)化工程有限責(zé)任公司 河南洛陽(yáng) 471039
針對(duì)礦井提升機(jī)恒減速電液制動(dòng)系統(tǒng)的仿真分析,是中信重工采用 AMESim 和 Simulink 聯(lián)合仿真的形式進(jìn)行的。AMESim 是一個(gè)多學(xué)科領(lǐng)域復(fù)雜系統(tǒng)建模仿真平臺(tái),用戶可以在單一平臺(tái)上建立復(fù)雜的多學(xué)科領(lǐng)域的系統(tǒng)模型,并進(jìn)行仿真計(jì)算和深入分析,也可以在這個(gè)平臺(tái)上研究元件或系統(tǒng)的穩(wěn)態(tài)和動(dòng)態(tài)性能。目前,AMESim 在液壓模型方面做得較為全面,多用于液壓系統(tǒng)的仿真分析。與 AMESim 中模塊化的建模不同,在 Simulink 中需要用數(shù)學(xué)公式來(lái)表達(dá)模型。Simulink 是 MATLAB 的重要組件之一,它提供一個(gè)動(dòng)態(tài)系統(tǒng)建模、仿真和綜合分析的集成環(huán)境。在該環(huán)境中,無(wú)需大量書(shū)寫(xiě)程序,只需要通過(guò)簡(jiǎn)單直觀的鼠標(biāo)操作,就可構(gòu)造出復(fù)雜的系統(tǒng)。Simulink 具有適應(yīng)面廣、結(jié)構(gòu)和流程清晰、仿真精細(xì)、貼近實(shí)際、效率高、靈活等優(yōu)點(diǎn),廣泛應(yīng)用于控制理論和數(shù)字信號(hào)處理的復(fù)雜仿真和設(shè)計(jì)[1]。
恒減速電液制動(dòng)系統(tǒng)多應(yīng)用于大型多繩摩擦式提升機(jī),以避免提升機(jī)制動(dòng)時(shí)因減速度過(guò)大造成的鋼絲繩打滑現(xiàn)象,保障提升機(jī)的安全運(yùn)行。該系統(tǒng)可根據(jù)監(jiān)測(cè)到的減速度值,通過(guò)調(diào)整制動(dòng)油壓來(lái)實(shí)現(xiàn)連續(xù)調(diào)節(jié)制動(dòng)力,使制動(dòng)減速度保持恒定。因此,提升機(jī)的緊急制動(dòng)減速度將不受不平衡負(fù)載的影響,而保持一恒定值[2]。
1 系統(tǒng)原理
礦井提升機(jī)恒減速電液制動(dòng)系統(tǒng)原理如圖 1 所示,其制動(dòng)工作分為兩種,一是工作制動(dòng),二是安全制動(dòng)。其中,安全制動(dòng)又分為恒減速安全制動(dòng)、恒力矩二級(jí)安全制動(dòng)和井口一級(jí)安全制動(dòng) 3 種。筆者主要對(duì)恒減速安全制動(dòng)進(jìn)行仿真分析。
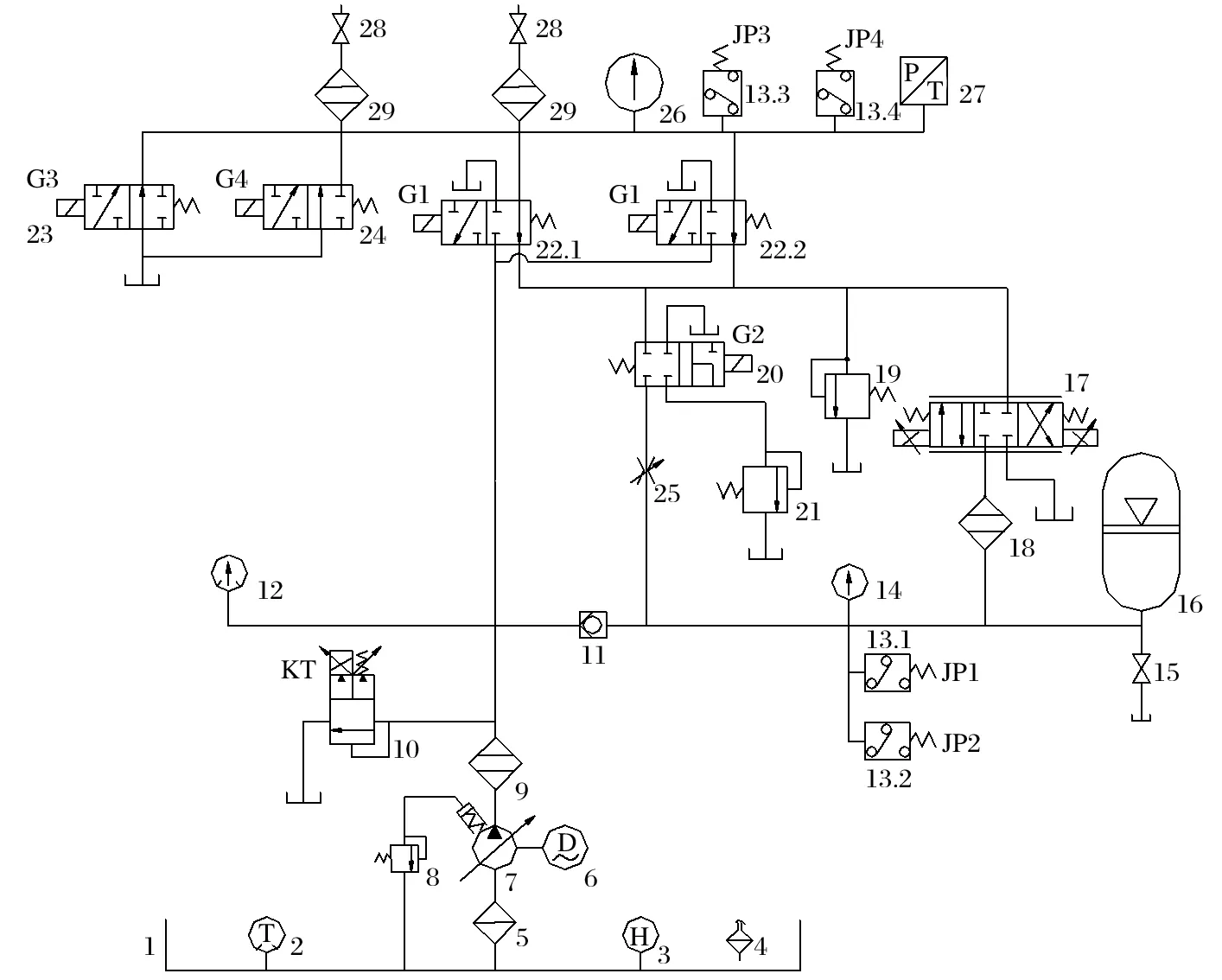
圖1 恒減速電液制動(dòng)系統(tǒng)液壓原理Fig.1 Hydraulic principle of constant deceleration electro-hydraulic braking system
提升機(jī)正常工作到達(dá)停車(chē)位時(shí)為工作制動(dòng)。此時(shí),容器及其負(fù)載的速度已降到接近零,一般為爬行速度 (v≤0.5 m/s2),依靠電液比例溢流閥調(diào)壓使系統(tǒng)油壓下降到系統(tǒng)殘壓,盤(pán)形制動(dòng)器合閘,提升機(jī)處于靜止?fàn)顟B(tài)[3]。
當(dāng)?shù)V井提升機(jī)出現(xiàn)故障 (如全礦斷電),此時(shí),液壓站將采用安全制動(dòng)。安全制動(dòng)時(shí),容器及其負(fù)載仍處于運(yùn)動(dòng)狀態(tài),安全制動(dòng)一方面要使負(fù)載及時(shí)停止,另一方面又要防止鋼絲繩在摩擦輪上出現(xiàn)滑動(dòng)等危險(xiǎn)工況,因此安全制動(dòng)需要采用恒減速制動(dòng)。恒減速安全制動(dòng)使用比例方向閥調(diào)節(jié)系統(tǒng)油壓,使制動(dòng)減速度與預(yù)設(shè)減速度保持一致,避免鋼絲繩在摩擦輪上的滑動(dòng),確保提升系統(tǒng)的安全。
2 AMESim/Simulink 聯(lián)合仿真模型
在 AMESim 中主要實(shí)現(xiàn)液壓系統(tǒng)的建模,而Simulink 中主要包括負(fù)載部分的模型和控制信號(hào)。在AMESim 中建立的聯(lián)合仿真模型如圖 2 所示。
圖2 中方框 D 模塊為 AMESim 與 Simulink 的接口,AMESim 中的液壓模型向 Simulink 中傳遞盤(pán)形制動(dòng)器的油壓信號(hào),Simulink 通過(guò)計(jì)算后將 6 組控制信號(hào)返回 AMESim 模型中,實(shí)現(xiàn)控制作用。系統(tǒng)采用聯(lián)合仿真方式,液壓系統(tǒng)的參數(shù)需要在 AMESim 中進(jìn)行設(shè)置,而控制信號(hào)的調(diào)節(jié)需要在 Simulink 中進(jìn)行設(shè)置。
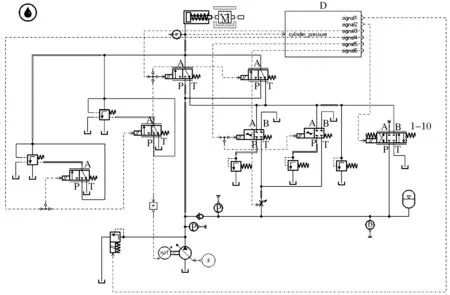
圖2 AMESim 聯(lián)合仿真模型Fig.2 AMESim combined simulation model
3 恒減速安全制動(dòng)仿真分析
3.1 一般工況
在仿真平臺(tái)上進(jìn)行恒減速安全制動(dòng)的仿真分析,設(shè)定提升系統(tǒng)兩容器的靜張力差為 280 kN,提升容器m1=28 000 kg,提升容器m2=0 kg。
3.1.1 重載上提工況
采用 PID 控制方式,設(shè)置P=0.1,I=20,D=0。在工作制動(dòng)中,需要較大的積分常數(shù)I,積分環(huán)節(jié)在該控制中起主導(dǎo)作用,比例環(huán)節(jié)雖然能在制動(dòng)的最初階段減小誤差,但比例環(huán)節(jié)會(huì)影響中段的制動(dòng)響應(yīng)和積分環(huán)節(jié)的控制效果。綜合多次仿真分析的結(jié)果,采用較大的I值和較小的P值,可得到較好的制動(dòng)效果。
容器的初始速度設(shè)為 2 m/s,預(yù)設(shè)減速度為 1.8 m/s2,得到上提工況下恒減速安全制動(dòng)仿真結(jié)果如圖3 所示,減速度誤差曲線如圖 4 所示。
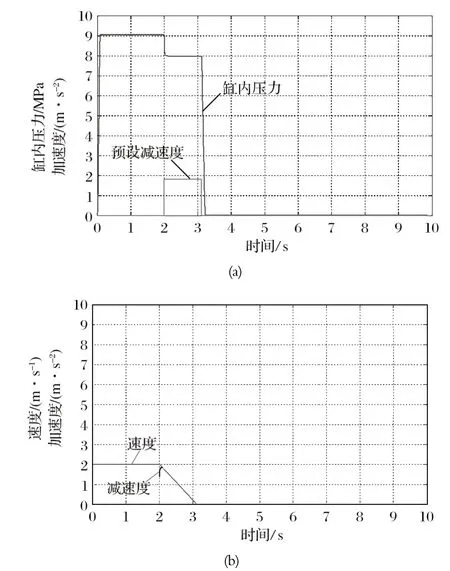
圖3 重載上提恒減速安全制動(dòng)仿真結(jié)果Fig.3 Simulation results of heavy-load hoisting constantdeceleration security braking
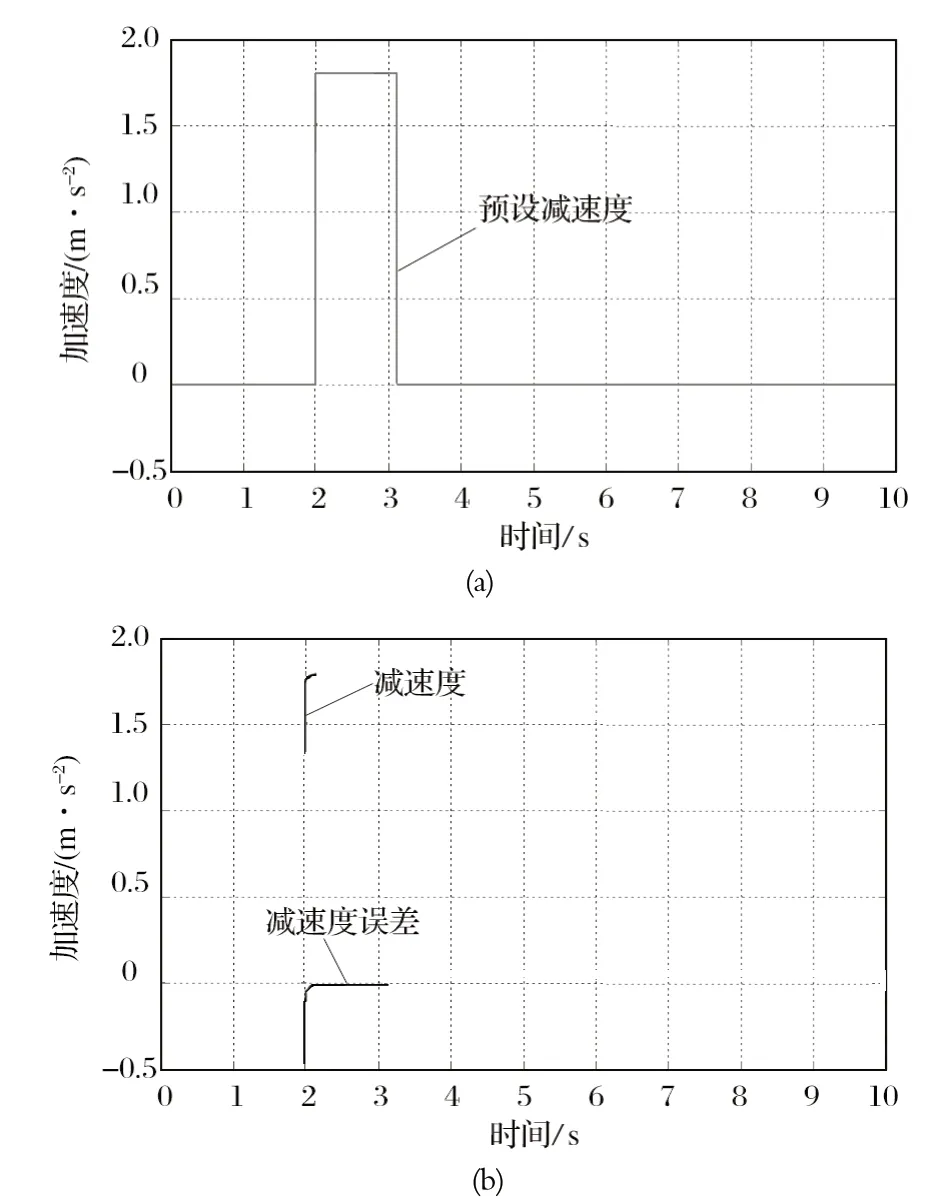
圖4 重載上提減速度誤差曲線Fig.4 Error curve of heavy-load hoisting deceleration
由圖 3 可知:在此工況下,得到的減速度曲線與預(yù)設(shè)減速度曲線十分接近,負(fù)載速度在開(kāi)始減速 1.1 s后降為 0,平均減速度值為 1.789 4 m/s2。
由圖 4 可知:減速度誤差均為負(fù)值,即減速度小于預(yù)設(shè)減速度,而最大誤差值為 0.46 m/s2;誤差在制動(dòng)開(kāi)始 0.1 s 后變得極小;平均減加速度為 1.789 4 m/s2。
3.1.2 重載下放工況
采用同樣的靜張力差和 PID 控制對(duì)重載下放工況進(jìn)行仿真。容器的初始速度和減速度與重載上提工況設(shè)置相同,得到的安全制動(dòng)仿真結(jié)果如圖 5 所示,減速度誤差曲線如圖 6 所示。
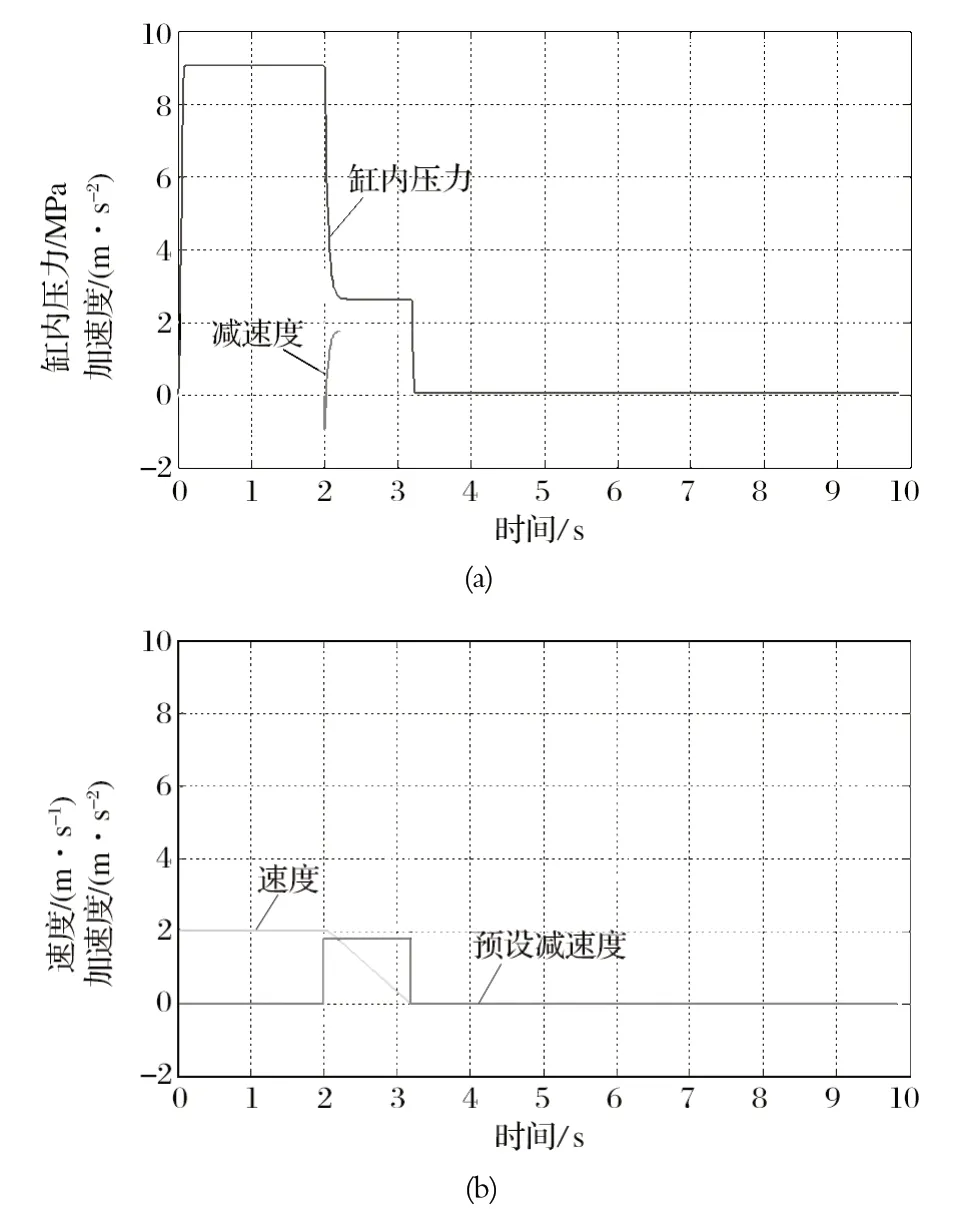
圖5 重載下放恒減速安全制動(dòng)仿真結(jié)果Fig.5 Simulation results of heavy-load lowering constantdeceleration security braking
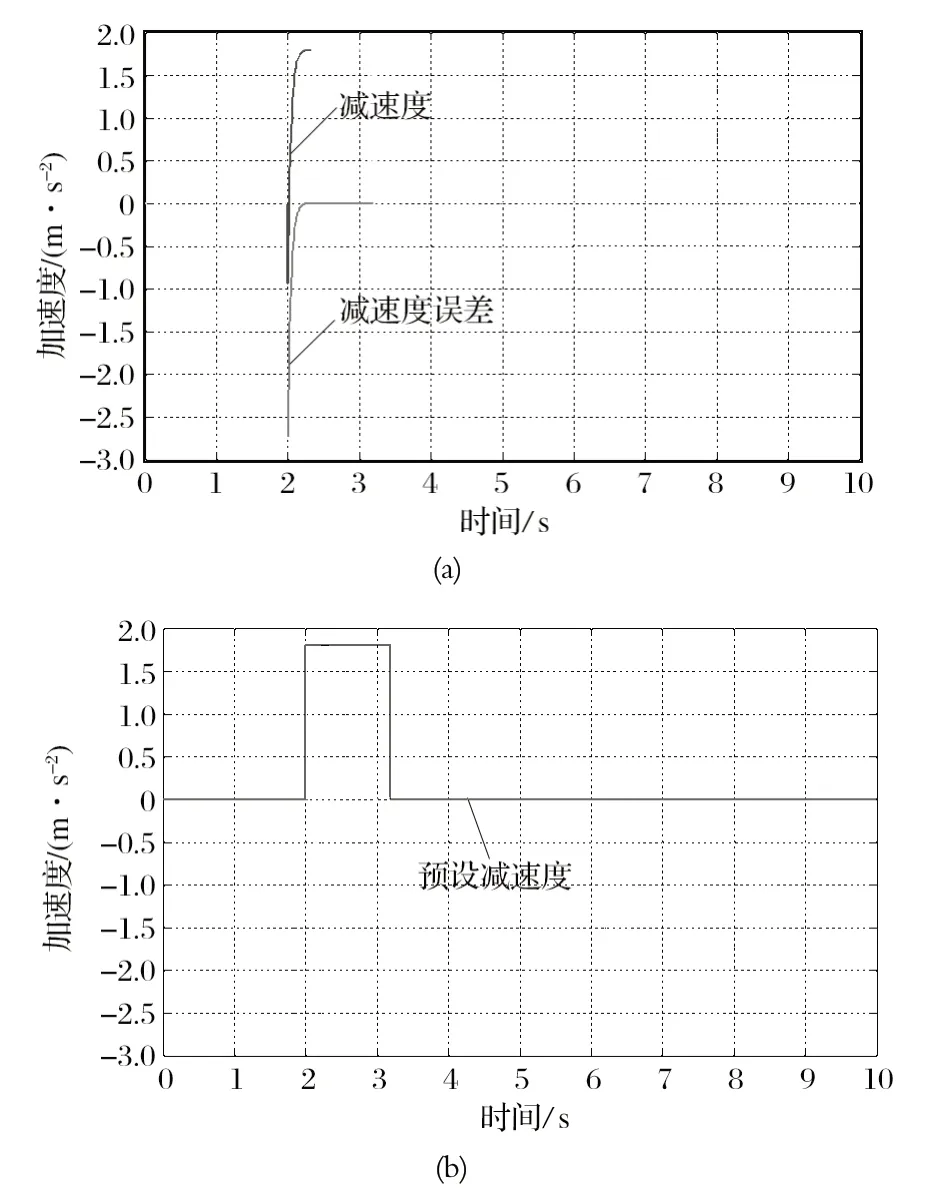
圖6 重載下放減速度誤差曲線Fig.6 Error curve of heavy-load lowering deceleration
由圖 5 可知:重載下放工況下,安全制動(dòng)所用的時(shí)間比重載上提略長(zhǎng),該過(guò)程中最大減速度誤差達(dá)到了 2.57 m/s2,這是由于在制動(dòng)過(guò)程開(kāi)始階段,制動(dòng)液壓缸內(nèi)的油壓下降過(guò)緩,而下放時(shí)負(fù)載的自重仍起著加速的作用,制動(dòng)力不夠。但系統(tǒng)響應(yīng)仍在 0.2 s 后得到較好結(jié)果,減速度誤差迅速減小,最后得到的平均減速度為 1.67 m/s2。
同樣的 PID 參數(shù)設(shè)置,在重載上提和下放兩種工況下,安全制動(dòng)效果有明顯的差異,其原因在于提升機(jī)停機(jī)后,負(fù)載本身重力產(chǎn)生的加速度。在重載上提工況下,負(fù)載重力產(chǎn)生的加速度方向與初始速度相反,起到減速的作用,有助于制動(dòng);在重載下放工況時(shí),負(fù)載重力產(chǎn)生的加速度方向與初始速度相同,起到加速的作用,惡化了制動(dòng)工況,該負(fù)載自重產(chǎn)生的加速度最大可達(dá) 1.1 m/s2,對(duì)系統(tǒng)制動(dòng)效果有較大影響。因此,在下放重物時(shí),需要更大的制動(dòng)力進(jìn)行制動(dòng),而在采用相同的控制策略下,重載下放的制動(dòng)響應(yīng)速度比重載上提的制動(dòng)響應(yīng)慢。
3.2 極限工況
對(duì)于安全制動(dòng)過(guò)程來(lái)說(shuō),滿載上提是最理想的工況,滿載下放是最?lèi)毫拥墓r,而這兩種極限工況的優(yōu)化又是相互矛盾的,需要重點(diǎn)分析。如果在極限工況下,系統(tǒng)性能能達(dá)到要求,則在其他工況下的制動(dòng)結(jié)果也不會(huì)差。
繼續(xù)增大積分環(huán)節(jié)可以提高下放重物時(shí)的制動(dòng)響應(yīng)速度,但過(guò)大的積分環(huán)節(jié)又會(huì)造成上提重物工況下減速度超調(diào),即實(shí)際減速度超過(guò)預(yù)設(shè)減速度,而減速度過(guò)大可能造成摩擦輪的打滑,因而在設(shè)定控制參數(shù)時(shí),需要考慮這兩個(gè)因素并進(jìn)行取舍。
3.2.1 相同 PID 參數(shù)
制動(dòng)效果同樣跟減速度的設(shè)定有關(guān)。在相同的控制參數(shù)下,將減速度設(shè)定為 1.6 m/s2,仿真得到的滿載上提工況下的安全制動(dòng)響應(yīng)曲線如圖 7 所示,滿載下放時(shí)的安全制動(dòng)響應(yīng)曲線如圖 8 所示。
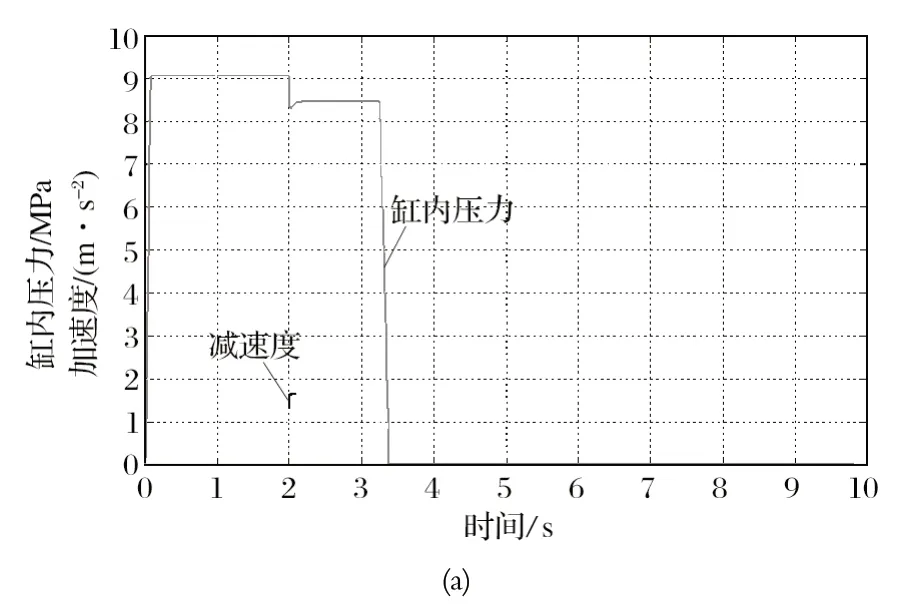

圖7 滿載上提安全制動(dòng)響應(yīng)曲線Fig.7 Response curve of full-load hoisting security braking
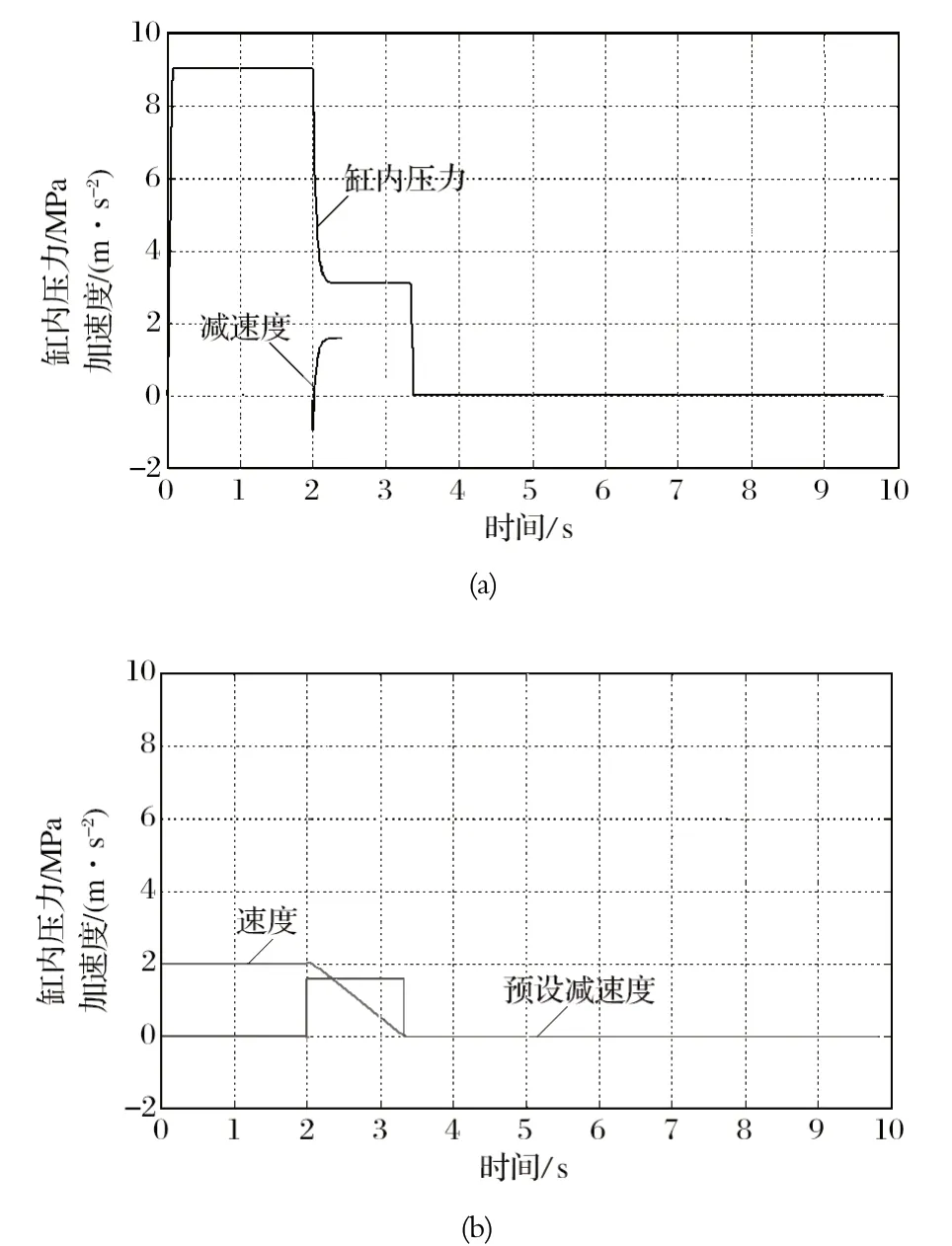
圖8 滿載下放安全制動(dòng)響應(yīng)曲線Fig.8 Response curve of full-load lowering security braking
從圖 7、8 可以看出:在制動(dòng)過(guò)程的最初階段,減速度有些微超調(diào)現(xiàn)象,即減速度超過(guò)了設(shè)定值;油壓也在最初階段下降得偏小而后又有所升高。不過(guò)該速度超差并不會(huì)使系統(tǒng)產(chǎn)生危險(xiǎn),因?yàn)樵摐p速度很大一部分是由負(fù)載自重產(chǎn)生的,而作用在摩擦輪上的摩擦力仍然很小,鋼絲繩不會(huì)有打滑的危險(xiǎn)。
3.2.2 更改 PID 參數(shù)
更改 PID 參數(shù),主要依靠調(diào)節(jié)比例環(huán)節(jié)。設(shè)定P=0.8,I=0,D=0。設(shè)定理想減速度為 1.8 m/s2,初始速度為 8 m/s,保持靜張力差不變,得到安全制動(dòng)響應(yīng)曲線如圖 9 所示。
由圖 9 可知:在該控制調(diào)節(jié)下,滿載上提的制動(dòng)過(guò)程較為理想,減速度與預(yù)設(shè)值只在最初的 0.1 s 內(nèi)有明顯差別,整個(gè)制動(dòng)過(guò)程在 4.5 s 內(nèi)完成,平均減速度為 1.790 m/s2。
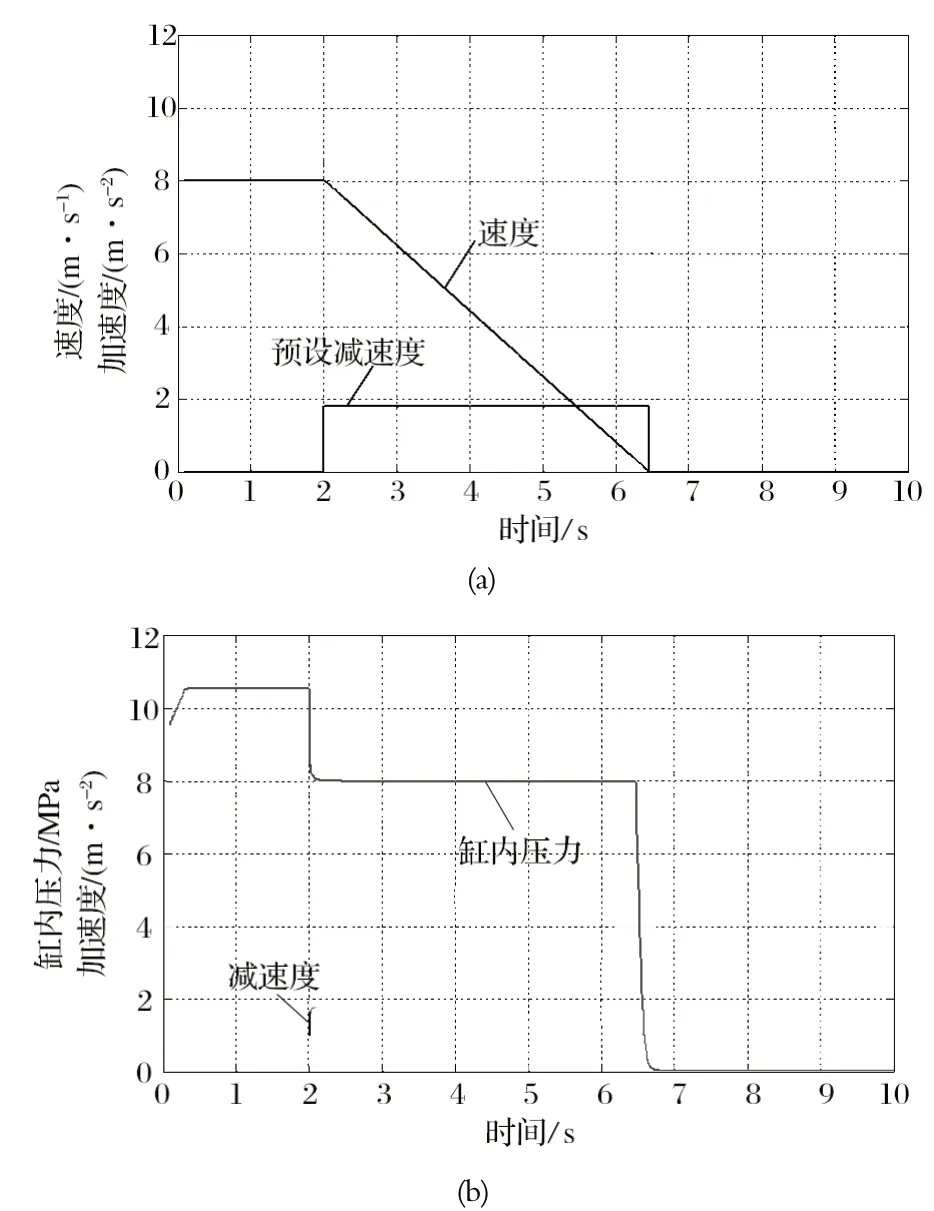
圖9 更改 PID 后滿載上提安全制動(dòng)仿真結(jié)果Fig.9 Simulation results of full-load hoisting security braking after alternation of PID
在相同控制下進(jìn)行滿載下放工況的仿真,得到的安全制動(dòng)響應(yīng)曲線如圖 10 所示。
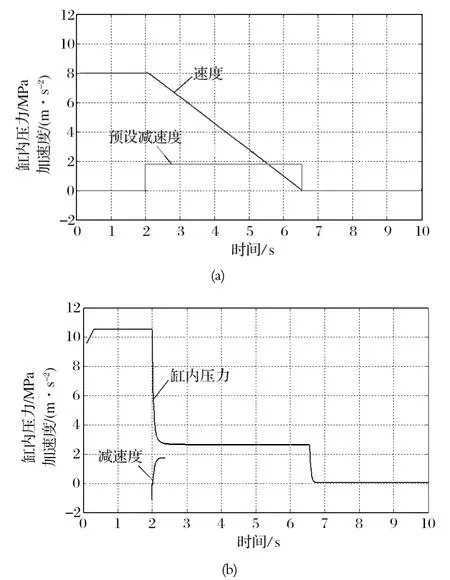
圖10 更改 PID 后滿載下放安全制動(dòng)仿真結(jié)果Fig.10 Simulation results of full-load lowering security braking after alternation of PID
與滿載上提制動(dòng)工況的結(jié)果類(lèi)似,滿載下放工況中,系統(tǒng)制度響應(yīng)速度較慢,減速度值與預(yù)設(shè)值在前 0.3 s 都有較大誤差,但制動(dòng)過(guò)程仍然在 4.6 s 內(nèi)完成,平均減速度為 1.754 m/s2。
增大比例環(huán)節(jié)同樣可以加快系統(tǒng)響應(yīng)速度,特別是對(duì)滿載下放工況,但比例環(huán)節(jié)的增大也可能造成滿載上提工況下減速度的超調(diào)。
3.3 仿真結(jié)果分析
對(duì)于不同工況,系統(tǒng)加速度產(chǎn)生原因是不完全相同的,有盤(pán)形制動(dòng)器的作用,也有載荷自身重力的影響,其對(duì)應(yīng)在摩擦輪上的摩擦轉(zhuǎn)矩也不相同。要使恒減速電液制動(dòng)系統(tǒng)在不同工況下均得到較好的響應(yīng),可具體分析實(shí)際的摩擦力極限值,設(shè)定合適的 PID 參數(shù)。
在實(shí)際的系統(tǒng)應(yīng)用中,可以通過(guò)減小閘盤(pán)間隙、優(yōu)化制動(dòng)器結(jié)構(gòu)來(lái)提高制動(dòng)系統(tǒng)的響應(yīng)速度,減少重載下放初期負(fù)載重力加速度造成的制動(dòng)減速度誤差,以獲得較為理想的整體控制效果。
4 結(jié)論
由于提升系統(tǒng)的制動(dòng)過(guò)程中存在不確定因素,造成實(shí)際的制動(dòng)結(jié)果與仿真結(jié)果有一定的偏差。但通過(guò) AMESim/Simulink 聯(lián)合仿真模型,可以更改不同的提升機(jī)運(yùn)行參數(shù),對(duì)不同工況進(jìn)行模擬,同時(shí)可設(shè)置多個(gè) PID 調(diào)節(jié)參數(shù),達(dá)到從各個(gè)角度對(duì)提升系統(tǒng)制動(dòng)過(guò)程進(jìn)行仿真分析的目的,這對(duì)于礦井提升機(jī)恒減速電液制動(dòng)系統(tǒng)的優(yōu)化設(shè)計(jì)和現(xiàn)場(chǎng)調(diào)試工作均具有指導(dǎo)意義。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
