有機蔬菜大棚除草機器人磁導航模糊控制系統研制
2022-08-31 03:46:54楊超淞洪曉瑋周衛鵬
制造業自動化 2022年7期
關鍵詞:信號
楊 婕,楊超淞,洪曉瑋,陳 勇*,周衛鵬
(1.南京林業大學 機械電子工程學院,南京 210037;2.鎮江臨泰農業科技有限公司,鎮江 212000)
0 引言
目前有機蔬菜生產中不能使用除草劑,一般采用人工除草[1],但人工除草耗時長,效率低。機械除草作為一種綠色無公害除草方式在現代有機蔬菜行業中已得到廣泛重視[2,3],具有非常樂觀的前景。
LiangYunlin等[4]研制了具有機器視覺和框架式激光指示器的除草機器人,提出了靜態除草路徑規劃算法。Zhang Q等[5]提出了動態路徑跟蹤算法,用于農業拖拉機跟蹤目標路徑。李會賓等[6]采用拓展卡爾曼濾波算法對用三維激光雷達結合RANSAC算法獲取果園地圖的行直線信息優化,設計了純跟蹤式的自主行間導航算法。金小俊等[7]開發了基于機器視覺導航的除草機器人,提出一種圖像分割算法。王鵬等[8]針對溫室大棚內噴霧機器人提出了一種導航線和QR碼組合的視覺導航算法,實現精準導航。目前,農業上多采用視覺導航,但是有很多不確定性且對于有機蔬菜大棚內除草機器人導航的研究較少。針對上述問題,因磁導航在工業上應用廣泛,成熟可靠,本文研發了一種有機蔬菜大棚內除草機器人的磁導航模糊控制系統。工業上磁條多在地面上或瓷磚下,本文提出將磁條鋪設在大棚鋼架上,機器人沿著磁條行駛,設計模糊控制器實現對機器人處于各種偏差現象的調整,從而進行自主導航。
1 除草機器人總體結構
如圖1所示,大棚中的田地分成塊狀區域來種植不同種類的蔬菜。因此本文中機器人的工作路線如圖2所示,機器人從區域1的底端出發,到達頂端后,控制原地轉向機構,移動到區域2的頂端,實現壟與壟的橫向行駛。依次運動,在到達區域4的底端后,按照原路線返回到起點,如此往復行駛。

圖1 蔬菜大棚示意圖
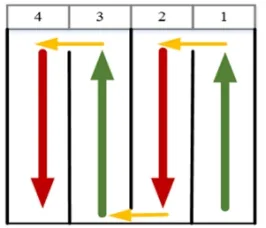
圖2 自動行駛路線
機器人的整體結構如圖3所示,主要由輪式移動平臺、線性模組、末端執行裝置以及雜草識別裝置四個部分組成,其中移動平臺包括四個行駛輪胎、四輪轉向機構、移動平臺框架以及磁傳感器等;雜草識別裝置由FPGA開發板等構成;供電電池固定在移動平臺框架的四個頂點處;磁傳感器通過支架板安裝在機器人兩側的幾何中心點;末端執行器固裝在Z軸下方且可調節其縱向位置以適應不同高度工作。樣機實物如圖4所示。

圖3 除草機器人結構圖

圖4 樣機實物圖
2 基于模糊控制器的磁導航路徑跟蹤研究
2.1 方案介紹
有機蔬菜大棚除草機器人的控制系統是一個復雜的非線性系統,經典控制理論方法只適用于線性系統。模糊控制器作為一種較為容易理解的非線性控制器[9],具有良好的實時性、魯棒性以及容錯性,其最大特點是不依賴于被控對象的精確數學模型,適用于各種非線性系統的控制。因此本文基于磁傳感器,采用模糊控制理論的方法研究大棚內除草機器人的導航路徑跟蹤,此導航方式定位精確,路徑鋪設、變更相對簡單,成本較低,可根據大棚自身的鋼結構進行鋪設。
2.2 磁導航模糊控制器的設計
機器人行駛時出現位置偏差是由其兩側輪轂電機之間的差速運動產生,控制相關電機轉速就能直接控制機器人的位姿狀態。因此,本文以磁傳感器相對于磁條正中位置的偏差以及偏差的變化率作為模糊控制器的輸入以控制電機轉速,被控電機的PWM占空比值作為輸出設計了一種二維雙輸入單輸出的磁導航模糊控制器[10],如圖5所示。

圖5 磁導航模糊控制器
2.2.1 輸入和輸出變量的模糊化
磁導航傳感器必須與對應極性的磁條配套使用,與磁條的有效感應距離多為10mm~65mm。本文選用具有8路開關量信號輸出的CNS-MGS-08磁傳感器。將磁傳感器垂直安裝在移動平臺的前方和側方,距離磁條表面40mm左右,磁條寬度為30mm,利用傳感器內部間隔的8個采樣點檢測出磁條周圍的磁場,每個采樣點都有一路對應輸出信號,當采樣點采集到磁信號時,就會輸出低電平,而沒有采集到磁信號的通道會被置于高阻狀態,磁傳感器輸出的信號經過光電 合器處理后能直接與DSP芯片的I/O后連接。
本文將磁傳感器的8路磁信號通道依次從左往右編號,然后將傳感器以偏差量為一厘米分別做左偏和右偏測試,直到完全偏出磁條,左偏、右偏測得的實際輸出信號分別如圖6(a)、圖6(b)所示,紅圈代表有信號輸出,白圈代表無信號輸出,其行駛時的左右偏離狀況分別有6種磁信號輸出組合狀態。

圖6 輸出信號
若中間有四路信號為紅色,則表示機器人正處于磁條中間位置。根據檢測到的信號狀況把偏差的實際范圍定為[-4cm,4cm],偏差量的單位為1cm,設置偏差E的論域為{-3,-2,-1,0,1,2,3},將偏差E的模糊子集定為7檔。模糊控制器的第二輸入偏差變化率EC是當前誤差與上次誤差的比較,即EC=E(K)-E(K-1),設定EC的實際范圍為[-3,3],其論域定為{-3,-2,-1,0,1,2,3}。
模糊控制器的輸出是機器人移動平臺兩側輪轂電機的PWM波占空比的差值U=右側電機占空比—左側電機占空比。根據電機調速試驗知輸出U的實際范圍為[-15%,12%],其論域定為[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6];為對應輸入等級,輸出的模糊子集也取7檔。建立輸出量的模糊語言為{右電機加大速,右電機加中速,右電機加小速,左右電機速度不變,左電機加小速,左電機加中速,左電機加大速。
2.2.2 建立模糊規則
規則庫是模糊控制器的核心部分,反映了控制器輸入與輸出的對應關系。機器人在沿磁條行駛時,其自身位姿狀態與給定路徑的偏差情況如圖7所示。

圖7 機器人位姿狀態
依據機器人與磁條的位姿狀態和實際駕駛經驗總結調整機器人行駛路徑偏差的原則大致為:當車體位置如圖7(a)中所示出現左偏時,若偏差量極大,應直接輸出較大的控制量使左側電機加大速實現糾偏;若偏差量適中,且有減小偏差的趨勢,應控制左側電機適當加速回到正軌;若偏差量較小,則直接控制左側電機輸出較小的控制量實現糾偏;車體位置如圖7(c)中所示出現右偏的情況與上述同理。
2.2.3 模糊決策和反模糊化
目前大量研究表明采用以關系合成推理(CRI)為基礎能衍生出多種模糊推理方法,其中以Mamdani推理方法最為廣泛使用,它的推理表達式為:
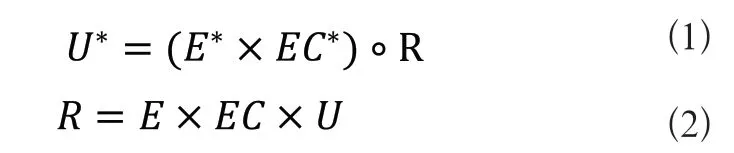
在計算R前,首先依據模糊規則的輸入部分得到向量矩陣Qi,然后將Qi轉化成隸屬函數向量同對應規則的輸出部分作直積得到每條規則下的模糊向量矩陣Ri,最后將所有的Ri作合成運算得到總模糊關系矩陣R。在進行模糊推理時,只能根據輸入量在論域中的等級值進行合成運算。
經過模糊推理得出的輸出控制量還是模糊集合,不能直接作用于實際輸出環節。因此,必須將控制器輸出的模糊量轉化為精確的數字量,本文將采用加權平均法對輸出的模糊量進行清晰化,其離散情況下的公式如下,式中控制決策值是模糊控制器的輸出量PWM波占空比差值。

3 實驗與分析
以機器人前進動作為研究對象,包括縱向和橫向行駛,通過實驗結果對機器人的直線糾偏能力和行駛速度性能進行綜合實驗分析。設定行駛距離為3米,速度定為0.3m/s,計時得出機器人的實際移動速度,將黑色油墨筆貼在鋼板的中心位置,機器人在移動時會在地上畫出軌跡,根據畫出的軌跡與鋪設的直線軌跡比較測出每次實驗的最大偏差距離。將機器人的起始位置分別置于偏離磁條2cm、1cm和無偏差位置進行實驗,如圖8、圖9所示,前五次初始位置為右偏,后五次為左偏。速度近似曲線如圖10所示。

圖8 縱向最大橫向偏差距離

圖9 橫向最大橫向偏差距離

圖10 速度性能曲線
由圖可見,機器人行駛時相對于鋪設磁條的偏差距離范圍在0~20mm之間,縱向偏差整體略小于橫向偏差,當機器人初始位置處于正中位置時最大橫向偏差距離最小;機器人在行駛速度方面較為穩定,沒有明顯的波動變化,基本滿足設計要求。
4 結語
本文主要針對有機蔬菜大棚除草機器人的路徑跟蹤研究,將工業上的磁導航應用到有機蔬菜大棚內,提出將磁條鋪設在大棚鋼架上,機器人沿著磁條行駛,使用模糊控制理論的方法實現機器人的直線行走,通過比較采集到的磁信號對移動平臺的輪轂電機不斷進行調速和控制機器人沿著制定好的行駛路線行駛。實驗結果顯示,該方法適用于蔬菜大棚除草機器人,行駛速度穩定,沿直線行駛的能力較好,與理想路徑誤差在0~20mm之間,滿足蔬菜大棚的需求。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
