基于改進滑膜控制器的機械臂力/位混合控制研究
2022-08-30 02:40:20梁艷芳楊永明胡云飛譚宏澤邵蕓松馬佳琪
科技創新與應用 2022年23期
關鍵詞:機械
梁艷芳,楊永明,胡云飛,譚宏澤,邵蕓松,馬佳琪
(北華航天工業學院 機電工程學院,河北 廊坊 065000)
目前,機械臂在自動生產制造過程中扮演著重要的角色。但是,大部分機械臂為位置控制[1],劉凱等[2]設計了一種自抗擾控制器,通過設計狀態觀測器來實時估計并補償內外擾動,從而消除內外擾動對系統的影響,使得軌跡跟蹤效果更佳。近年來,隨著機器人領域的不斷發展,學者們開始考慮到機械臂末端與環境進行交互的情況,如拋光、打磨或裝配等[3-4],這些不僅要求機械臂位置軌跡精確跟蹤,還需要控制施加垂直于給定表面的力,因此單純的位置控制已經無法滿足控制要求[5]。柳建良[6]采用反步法設計了適用于多機械臂系統模糊自適應力/位控制方案。Chaudhary等[7]提出了一種基于零空間矢量的力/位混合控制,通過設置優化性能指標來對力進行優化控制。陳洪等[8]提出了一種基于遺傳算法的雙臂機器人模糊力/位混合控制策略,采用遺傳算法離線優化模糊控制規則對力位進行跟蹤控制。周軍等[9]和Peng等[10]利用阻抗控制,根據反饋的接觸力通過模糊推理確定參考比例因子從而生成適應剛度變化的運動軌跡。Zhang等[11]采用模糊PID的控制方法對航空葉片自動磨削力/位置進行控制,該策略具有較高的力控和跟蹤精度。李二超等[12]提出了一種面向位控機器人的力/位混合控制策略,仿真表明該策略具有較高的力控制精度和表面跟蹤能力,增強了對接觸環境參數變化的魯棒性。
1 雙連桿機械臂的數學模型
本文考慮簡化的剛性雙連桿機械臂結構如圖1所示,在不考慮摩擦力等外界干擾的作用時,二自由度機械臂動力學方程可表示為:

圖1 平面二自由度機械臂結構

其中,D(q)為正定的慣性矩陣;C(q,q˙)為離心力和哥氏力矩陣;G(q)為重力矩陣;q為關節位置;τ為關節驅動力矩。


1.1 工作空間位置與關節角位置轉換
為了對工作空間目標軌跡進行跟蹤,需要將工作空間的直角坐標轉換成關節空間的關節角位置,根據圖1,可得到機械臂關節角度與機械臂在工作空間的末端位置的關系[13],表示如下:


根據余弦定理可得:
從而可得:

1.2 力/位混合控制模型
力/位混合控制模型[14]如圖2所示,在力和位置的控制上不存在耦合現象,為2個獨立的控制方向。其控制率為:

圖2 力/位混合控制原理圖

其中uf為力控制;up為位置控制;S為空間選擇矩陣,為2×2的對角矩陣,通過S矩陣對機械臂的力控和位控進行相應的選擇。J為機械臂力域中的雅可比矩陣。
2 控制算法設計
傳統滑模控制器對系統參數的攝動和外部干擾的不變性是以控制量的高頻抖振換來的,一旦引入高頻輸入,就會激發系統的未建模特性,會影響系統的控制性能,因此必須改進傳統的滑模控制器,將有害的抖振減小到一定程度,從而保證滑模控制的不變性。
本文研究的機械臂系統為典型的非線性控制系統,在實際的控制過程中,存在很多不可預見的外部干擾,這將會影響到機械臂的控制精度。傳統滑模控制器的開關切換相對于被控對象的運動狀態,存在時間滯后問題,這就使得系統軌跡在抵達所設計的滑模控制器切換面因誤差影響而產生振動,為了消除抖振現象[15],采用一種連續的雙曲正切函數替代傳動滑模控制器算法中的切換函數。
定義雙曲正切函數為:

式中,ε>0,其取值決定雙曲正切函數的陡度。根據定理1可知:

定理1[15]:對于任意給定的實數x,存在

設qd是在關節空間中的理想軌跡,則q˙d和q˙d˙為關節空間理想的速度和加速度。

其中,Λ為正定矩陣;Fd為末端期望力;Fe為力傳感器采集到末端的力。
此處仿真用彈簧滑塊系統模擬機械臂末端與環境接觸的力的控制,利用彈簧的變形量來計算傳感器的值。關系式如下:

其中,ke為彈簧的剛度系數。
設計具有光滑雙曲正切函數的滑模控制器為:

其中,K為滑模控制器參數,K>0,ε>0。
3 仿真分析
在MATLAB的simulink環境下,按照力位混合控制系統原理圖搭建仿真模型,加入未知擾動的情況下,設計滑模控制器的控制增益K=[280 0;0 280],Kp=50,η=12,ε=0.1,機械臂系統模型的具體參數見表1,笛卡爾工作空間的期望軌跡如式(15)。

表1 系統模型參數

如圖3—圖5為傳統PID控制器在受到外界干擾對機械臂力/位的跟蹤的效果,仿真結果可看出PID控制對外界干擾雖有一定的削弱作用,但是跟蹤效果出現了明顯的超調和震蕩現象,尤其在對末端力的跟蹤,達不到預期的跟蹤效果。
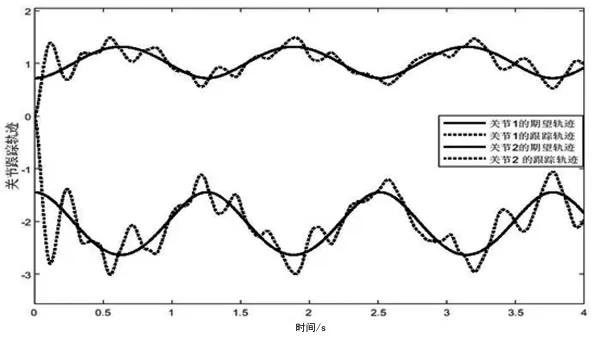
圖3 PID控制器對關節位置的跟蹤

圖5 PID控制器對機械臂末端力的跟蹤

圖4 PID控制器對機械臂末端位置的跟蹤
圖6—圖8為基于雙曲正切函數的滑模控制器對受到外界干擾時的機械臂的力/位跟蹤效果,從圖6—圖8可以看出,機械臂的關節軌跡、位置軌跡跟蹤大約在0.2 s內跟蹤上期望軌跡,且跟蹤效果良好,沒有明顯震蕩現象。

圖6 改進滑膜控制器對機械臂末端關節的跟蹤
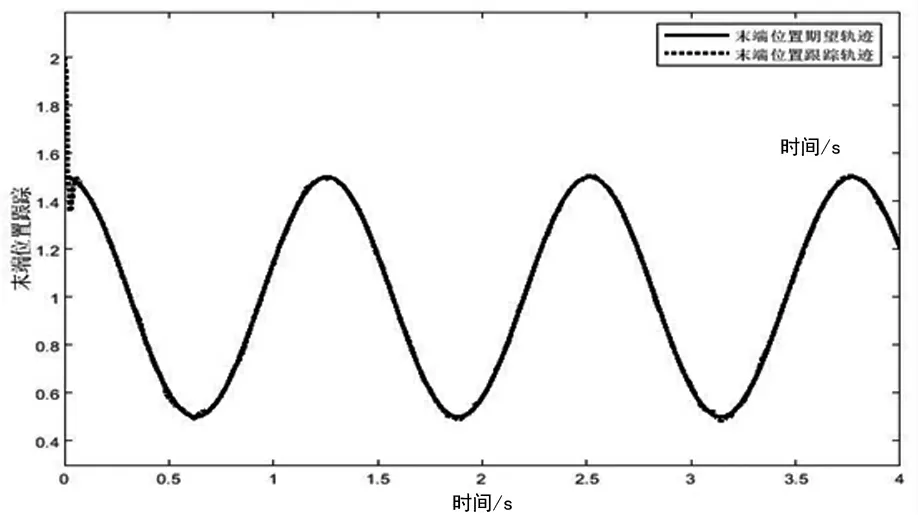
圖7 改進滑膜控制器對機械臂末端位置的跟蹤
圖8是對機械臂在加入外界擾動下對恒力的跟蹤效果,圖9為對變力的跟蹤效果,對機械臂末端力的控制是在傳統PID的基礎上加入雙曲滑模控制算法,該控制精度相比于傳統PID要好很多。

圖8 改進滑膜控制器對機械臂末端恒力的跟蹤
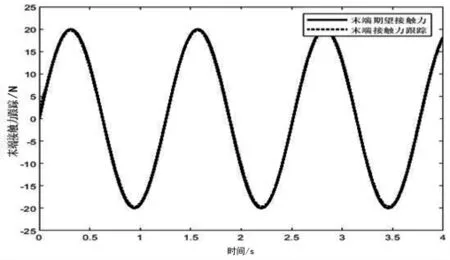
圖9 改進滑膜控制器對機械臂末端變力的跟蹤
4 結束語
本文針對機器人中常用的雙連桿機械臂,提出了一種基于雙曲正切函數滑膜控制器的力/位混合控制方案,經仿真發現,該算法與傳統PID控制算法相比,具有良好的跟蹤精度,即使在具有強烈干擾的情況下,控制器仍然能獲得較好的控制品質,具有強魯棒性。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09