基于喜鵲的多鳥類統(tǒng)一運動機(jī)構(gòu)設(shè)計與實驗
2022-08-30 02:39:38張晨星宋丕偉岳澤鍇劉羽婷
科技創(chuàng)新與應(yīng)用 2022年23期
張晨星,宋丕偉,岳澤鍇,王 亮,劉羽婷
(大連科技學(xué)院 機(jī)械工程學(xué)院,遼寧 大連 116052)
仿生撲翼飛行器是一種通過扇動翅膀飛行的機(jī)器。其中仿生昆蟲飛行器和仿生蝙蝠飛行器發(fā)展較好,而仿生鳥類飛行器發(fā)展較為緩慢,該領(lǐng)域發(fā)展滯后的原因主要是鳥類翼型具有比其他2種飛行器的薄膜類翼型更為復(fù)雜的空間結(jié)構(gòu),并且鳥類物種繁多,運動方式及氣動特性具有一定的差異性,從而該類飛行器難以形成一種比較可靠的統(tǒng)一運動方式,本文研究目標(biāo)是建立一種具備普適性的多鳥類統(tǒng)一運動機(jī)構(gòu)模型。
1 基于喜鵲的多鳥類統(tǒng)一運動機(jī)構(gòu)簡介
基于喜鵲的多鳥類統(tǒng)一運動機(jī)構(gòu)簡稱XQ-2B,是基于生物工程學(xué)、空氣動力學(xué)、機(jī)械工程學(xué)、電氣工程及自動化多種學(xué)科為一體的仿生撲翼飛行器,目前,該運動機(jī)構(gòu)共包含41個零部件,其主要的組成部分有:曲柄搖桿運動機(jī)構(gòu)、動力傳遞減速系統(tǒng)、尾翼萬向桿方向系統(tǒng)、內(nèi)外翼仿生飛羽、無線控制及電路系統(tǒng),具有喜鵲超大撲翼角度,并可通過修改構(gòu)件參數(shù)、飛控系統(tǒng)調(diào)頻及程序設(shè)計等方法,實現(xiàn)仿生多種鳥類的撲翼功能。如圖1所示。
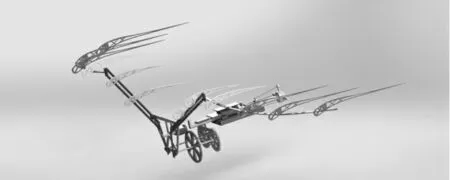
圖1 XQ-2B基于喜鵲的多鳥類統(tǒng)一運動機(jī)構(gòu)整體結(jié)構(gòu)
2 生物學(xué)分析
對于多鳥類統(tǒng)一運動機(jī)構(gòu)的建立,需要選擇具有代表性的設(shè)計藍(lán)本,藍(lán)本需要具有普適性的飛行方式并具有較大撲翼角度,通過多日對我國脊索動物門鳥綱約1 400種鳥類系統(tǒng)的調(diào)查、選型和分析,最終將樣本鎖定在雀形目鴉科鵲屬的喜鵲上。喜鵲除了南美洲、大洋洲和南極洲幾乎分布于世界各大陸,并且往往生活在人類集聚地周邊,非常適合藍(lán)本數(shù)據(jù)的采集和研發(fā)工作的開展。
3 運動機(jī)構(gòu)擬合
針對喜鵲仿生運動機(jī)構(gòu)的建立,需要對鳥類骨骼結(jié)構(gòu)進(jìn)行分析,此外,團(tuán)隊加入了人體骨骼與鳥類骨骼進(jìn)行對比分析,經(jīng)過大量的資料查詢后發(fā)現(xiàn),鳥類相比于人類骨骼,肱骨較短,尺骨和指骨下側(cè)附有次級和初級飛羽,如圖2所示。可以將掌骨、指骨和初級飛羽擬合為一個構(gòu)件,并結(jié)合生物學(xué)、仿生機(jī)械學(xué)對運動機(jī)構(gòu)進(jìn)行設(shè)計,最終運動機(jī)構(gòu)運動簡圖如圖3所示。

圖2 鳥類骨骼結(jié)構(gòu)圖

圖3 機(jī)構(gòu)運動簡圖
4 機(jī)械運動機(jī)構(gòu)部分
4.1 曲柄搖桿機(jī)構(gòu)
常規(guī)仿生撲翼機(jī)構(gòu)屬于一種鳥類對應(yīng)一種或多種撲翼機(jī)構(gòu),一直沒有一種較為統(tǒng)一的模型供學(xué)術(shù)參考,從而造成該領(lǐng)域內(nèi)結(jié)構(gòu)種類繁雜,可參考性不強(qiáng)。因此,通過對仿生撲翼機(jī)構(gòu)進(jìn)行創(chuàng)新設(shè)計,依靠曲柄搖桿機(jī)構(gòu),利用單級齒輪機(jī)構(gòu)來實現(xiàn)減速及動力傳輸,通過地面控制電控,調(diào)節(jié)電池輸入電機(jī)的電壓,進(jìn)行撲翼速度的調(diào)節(jié)。電機(jī)輸出動力,通過單級齒輪減速器進(jìn)行減速,并將動力傳輸至曲柄搖桿機(jī)構(gòu),從而實現(xiàn)撲翼動作。如圖4所示。

圖4 曲柄搖桿機(jī)構(gòu)
4.2 動力及減速器系統(tǒng)
由于在自然界中鳥類飛行的撲翼速度相較于步進(jìn)電機(jī)的轉(zhuǎn)速較低,為此在設(shè)計的過程中為電機(jī)添加了一級齒輪減速器和雙翼齒輪嚙合動力傳遞裝置,可以進(jìn)行傳動比為3的減速運動,整體齒輪系統(tǒng)采用鏤空設(shè)計,大大減少了系統(tǒng)的重量,雙翼動力齒輪的嚙合設(shè)計使得在進(jìn)行扭矩傳遞的過程中同時保證了飛行器雙翼振頻一致。如圖5所示。

圖5 動力及減速器系統(tǒng)
4.3 尾翼萬向桿方向系統(tǒng)
尾翼萬向桿方向系統(tǒng)共嵌有2個舵機(jī),3個萬向桿,由無線控制系統(tǒng)控制,可實現(xiàn)左右、上下以及配合聯(lián)動,可以靈活地實現(xiàn)多方向活動,仿生鳥類各種情況下的尾翼動作。

圖6 尾翼萬向桿方向系統(tǒng)
4.4 內(nèi)外翼仿生飛羽
內(nèi)外翼仿生飛羽是根據(jù)鳥類初級以及次級飛羽進(jìn)行剖面擬合,具有在藍(lán)本基礎(chǔ)上優(yōu)化后的、前緣、后緣等各項參數(shù),結(jié)合飛行器設(shè)計基礎(chǔ)所設(shè)計的一種凹凸翼型,整體材質(zhì)采用巴爾沙木,既有較輕的質(zhì)量,也有較高的強(qiáng)度,仿生飛羽整體采用鏤空結(jié)構(gòu),尤其是外翼部分的設(shè)計,與飛行器翼型設(shè)計略有不同,這種設(shè)計可以增加外翼邊緣的柔韌性,從而使其性能更接近于真實鳥類。如圖7所示。

圖7 內(nèi)外翼仿生飛羽
4.5 中繼通信模型的建立
本小組基于無人機(jī)中繼通信的實際應(yīng)用環(huán)境以及雙向中繼信道模型(TWRC),對仿生撲翼飛行器中繼通信模型進(jìn)行設(shè)計,可將地面終端、中繼無人機(jī)及仿生撲翼飛行器構(gòu)成的無線中繼鏈路建立為非對稱雙向中繼信道模型。如圖8所示。由圖8可知,節(jié)點A為地面終端,節(jié)點R為中繼無人機(jī),節(jié)點B為仿生撲翼飛行器。地面終端通過中繼無人機(jī)向仿生撲翼飛行器發(fā)送指令信息,仿生撲翼飛行器通過中繼無人機(jī)向地面終端反饋信息,地面終端和仿生撲翼飛行器之間沒有直接鏈路。

圖8 中繼通信模型
5 實驗分析及可行性驗證
5.1 虛擬樣機(jī)運動分析實驗
三維數(shù)字化模型建成之后,將模型導(dǎo)入inspire中,為了規(guī)范和限制各構(gòu)件之間的相對運動,對部分部件添加一些約束,設(shè)置剛體組并建立連接器,確定各鉸接部分連接關(guān)系,最終為運動機(jī)構(gòu)添加轉(zhuǎn)動電機(jī)及跟蹤器,設(shè)置控制類型,確立扭矩及轉(zhuǎn)動速度(60 rpm)為運動分析做好準(zhǔn)備。
驅(qū)動部分添加完畢后,便可進(jìn)一步對樣機(jī)進(jìn)行運動分析,提取各零件、剛體組、鉸接和轉(zhuǎn)動電機(jī)的位移、角速度、速度、角加速度、加速度、力和扭矩等各項參數(shù),并對轉(zhuǎn)動電機(jī)的要求扭矩、角度、速度(期望和實際)、角加速度、角急動度、功率、鉸接部分的力和扭矩進(jìn)行進(jìn)一步的分析,為后期材料的選型、設(shè)計的優(yōu)化和實物的制作打下基礎(chǔ)。
部分結(jié)構(gòu)運動實驗數(shù)據(jù)采集可視化分析結(jié)構(gòu)如圖9—圖11所示。
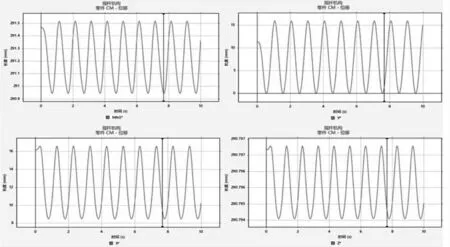
圖9 位移運動實驗數(shù)據(jù)采集

圖11 加速度運動實驗數(shù)據(jù)采集
5.2 質(zhì)量分析驗證
通過3D打印技術(shù)對XQ-2B輕量化虛擬樣機(jī)模型進(jìn)行完全體實物制作,模型各零件進(jìn)行組裝測試,并通過JJ124BC分析天平對模型運動機(jī)構(gòu)整體質(zhì)量進(jìn)行抗壓實驗和質(zhì)量數(shù)據(jù)采集,模型總質(zhì)量128.984 9 g(不包含仿生飛羽部分),遠(yuǎn)低于國際公認(rèn)的微型撲翼飛行器300 g的最高飛行質(zhì)量,從而證明該結(jié)構(gòu)設(shè)計是非常可行的。如圖12所示并且,在進(jìn)一步驗證整體的結(jié)構(gòu),完全固定整體結(jié)構(gòu)設(shè)計參數(shù)后,結(jié)構(gòu)可采用碳纖維材料,還可以進(jìn)一步減輕飛行器的質(zhì)量。

圖12 JJ124BC質(zhì)量分析實驗
圖10 速度運動實驗數(shù)據(jù)采集
6 結(jié)束語
國內(nèi)對仿生撲翼飛行器的研究現(xiàn)今雖然已經(jīng)取得的一些成果,但由于鳥類物種多樣,機(jī)械結(jié)構(gòu)與控制系統(tǒng)種類繁雜、難以形成一套具有完整性、普適性和多樣化的設(shè)計方法。本運動機(jī)構(gòu)的目標(biāo)以喜鵲為藍(lán)本,設(shè)計及驗證一種能夠仿生多種鳥類撲翼動作的新型飛行器的核心運動機(jī)構(gòu),并在此基礎(chǔ)上形成由提取藍(lán)本參數(shù)、代入運算進(jìn)行設(shè)計、虛擬樣機(jī)仿真和撲翼飛行器制造的完整設(shè)計流程,從而為我國的仿生撲翼飛行設(shè)計提供參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03