基于系統辨識法的航空發動機建模與應用
2022-08-30 02:39:16吳星星
科技創新與應用 2022年23期
吳星星
(貴州貴飛飛機設計研究院有限公司,貴州 安順 561000)
在進場下滑過程中,使用反區操縱技術的飛機需要使用油門來控制飛機下滑軌跡[1-2],《艦載機著艦規范》[2]明確規定了飛機對油門指令響應能力,即小油門特性的具體要求。為檢驗飛機小油門響應是否滿足規范要求,需要建立發動機數學模型來進行飛機小油門響應特性仿真計算。
航空發動機建模方法通常分為部件法和系統辨識法兩大類。部件法根據發動機工作原理基于結構力學、空氣動力學、熱力學等關系式建立各部件的非線性方程組,采用迭代法求解方程組從而得到發動機模型[3-5]。系統辨識法將發動機系統作為一個整體,根據油門桿輸入和推力、轉速等輸出的變化關系將發動機系統用傳遞函數模型代替,利用地面試車試驗數據或空中飛行試驗數據辨識模型結構和參數。系統辨識法重點在于模型的選擇、辨識方法的改進等方面。目前,航空發動機建模常采用部件法[6-7],特別是在發動機研制過程中,部件法建模仿真可對發動機各部件動態特性進行設計驗證,縮短研制周期,減少研制成本。但部件法原理復雜,存在部件級模型精度受部件特性數據少的限制,模型非線性方程組復雜程度高、迭代計算時間長、計算量過大和迭代收斂慢甚至發散等問題。在飛機運動建模仿真或飛控系統控制律設計中只需考慮發動機轉速、推力等對油門桿輸入的動態響應特性即可,不必關心發動機各部件運行狀況,可采用更高效的系統辨識法建立發動機等效傳遞函數模型。本文根據系統辨識法原理,選取一階系統和二階系統傳遞函數模型,使用某型發動機地面臺架試驗數據,采用動態系統辨識中常用的極大似然參數估計法辨識模型參數,通過最終預測誤差(FPE)、最優適配度(Best Fit)等判斷模型準確性,確定發動機模型后建立飛機縱向運動仿真模型對飛機小油門特性進行仿真分析。
1 系統辨識法
1.1 系統辨識過程
系統辨識是研究如何利用系統含有噪聲的輸入和輸出數據建立系統數學模型的學科[8],所獲得的模型與系統的近似程度取決于對系統先驗知識的了解,以及對數據、模型和準則函數的掌握和運用。系統辨識過程主要包括系統試驗、試驗數據處理、模型結構辨識、參數估計和模型檢驗等,其基本流程如圖1所示。

圖1 系統辨識的基本流程
為獲取發動機系統輸入輸出數據,在地面試車臺上開展了不同低壓轉速下的階躍油門推力響應試驗。試驗選取了4個低壓轉速狀態(分別為NL1、NL2、NL3和NL4,各轉速狀態依次增加5%),進行推油門桿和收油門桿的階躍操縱,使低壓轉速增加或減小約5%,其中NL1轉速狀態推油門和收油門的試驗數據如圖2和圖3所示,圖中ΔδT為油門桿角度變化量,ΔT為推力變化量。由于測量干擾影響,采樣數據通常需要進行濾波處理,本文采用高精度傅里葉變換算法對推力響應數據進行了濾波。

圖2 推力響應試驗數據(推油門)

圖3 推力響應試驗數據(收油門)
根據動態系統的時域分析法,從推力響應時間歷程曲線可以看出,該發動機系統可等效為一階系統或過阻尼二階系統,傳遞函數分別見式(1)和式(2),其單位階躍響應時域表達式分別為式(3)和式(4)。

式中:K為增益;T1、T2為時間常數。
1.2 辨識方法
極大似然法基于測量噪聲服從高斯分布的假設,若測量值為Z(t),則噪聲似然函數的負對數為

式中:Y為模型含參數θ的輸出值;N為每次試驗測量的數據個數;M為獨立試驗的次數。
對式(5)求偏導并令其等于0,則得到

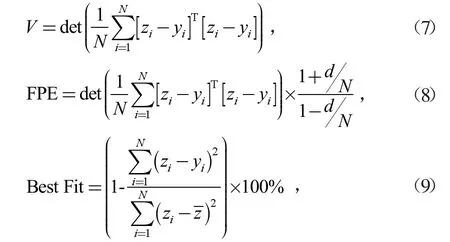
采用式(7)作為代價函數進行迭代計算使代價函數值最小,以最優適配度(Best Fit)、最終預測誤差(FPE)等模型評價準則確定模型結構、判斷參數辨識結果的準確性[9]。
2 辨識結果與分析
2.1 發動機模型辨識結果
根據上述原理,為確定發動機模型結構,利用低壓轉速NL1狀態推油門、收油門和NL2狀態推油門、收油門的試驗數據分別按一階和二階2種等效模型結構進行參數辨識,結果見表1。
從表1可以看出,轉速NL1狀態收油門和轉速NL2狀態推油門試驗數據使用一階系統和二階系統的最優適配度都較高,最終預測誤差都較小,但二階系統中有一時間常數很小,基本為0。當二階系統中的一個時間常數遠大于另一時間常數時,該二階系統可以等效為一階系統,因而采信一階系統的辨識結果。從轉速NL2狀態收油門辨識結果可以看出,使用一階系統的最優適配度和最終預測誤差都優于二階系統。從轉速NL1狀態推油門辨識結果可以看出,使用一階和二階系統模型都較準確,二階系統模型略優于一階系統。

表1 2種模型結構的參數辨識結果對比
綜合轉速NL1和NL2狀態推油門和收油門辨識結果,選擇一階系統作為該型發動機等效模型結構,其中轉速NL1狀態推油門和收油門一階系統辨識結果與試驗測量結果的對比分別如圖4和圖5所示,從圖中可見辨識結果和測量值重合度高。
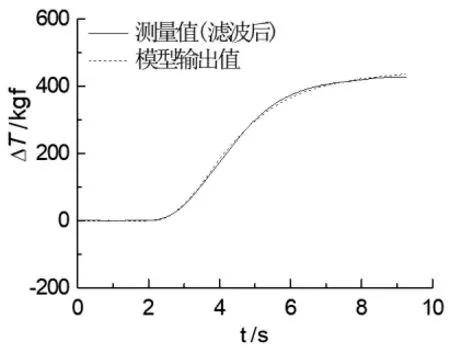
圖4 模型輸出與測量值對比(轉速NL1推油門)

圖5 模型輸出與測量值對比(轉速NL1收油門)
轉速NL3和NL4狀態按一階模型參數辨識的結果見表2。
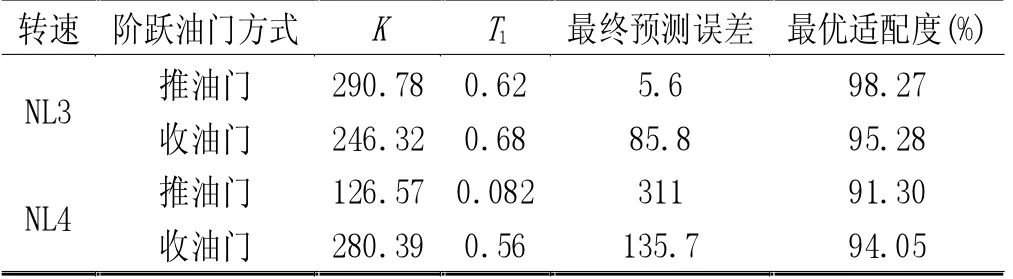
表2 發動機模型參數辨識結果
2.2 小油門特性仿真
艦載機進場著艦時處于低動壓狀態,飛機處于阻力曲線“背區”,導致軌跡穩定性降低甚至失穩,無動力補償時飛行員需要采用“反區”操縱技術精確控制飛機的軌跡[10],即通過油門控制下沉率,駕駛桿控制迎角。
因而在3.5°~4°光學下滑道上,需要頻繁使用油門進行調整,當下滑道偏低時,應推油門并小幅柔和向后拉桿;當下滑道偏高時,應收油門并小幅柔和向前推桿。可見“反區”操縱要求發動機對油門輸入要有足夠的響應速度,從而使飛機具有良好的小油門特性。著艦規范對艦載機小油門特性的具體要求為[2]:當油門指令輸入后,1.2 s時間內使飛機縱向加速度達到指令要求±0.120 g的90%,在整個下滑道的進場控制中,油門的輸入始終要達到這個要求。
艦載機設計必須滿足小油門特性要求,在方案階段和詳細設計階段都應對小油門特性進行仿真計算,為此需要建立準確的發動機模型,一是用于仿真計算小油門特性達標情況,二是用于小油門特性鑒定試飛前預估使縱向加速度達到規范要求所需的油門操縱量。
本文使用基于系統辨識法建立的發動機模型,在Matlab/Simulink仿真環境中建立飛機縱向運動仿真模型。根據發動機推力與低壓轉速對應關系,在給定下滑速度和下滑角的情況下,通過調整減速板組合狀態或減速板開度使飛機進場下滑時的低壓轉速分別處于NL1、NL2、NL3和NL4狀態,并分別進行同等油門桿階躍量的推油門和收油門操縱實時仿真。采用保持迎角不變的操縱策略,推油門使飛機縱向加速度增加,收油門使飛機縱向加速度減小,仿真得出的飛機縱向加速度時間歷程曲線如圖6所示。從仿真結果可以看出,轉速在NL1至NL3范圍內推油門,飛機小油門特性滿足規范要求,在NL4狀態推油門不滿足規范要求;轉速在NL3至NL4范圍內收油門滿足規范要求,在NL1和NL2狀態收油門不滿足規范要求。因此轉速在NL3時飛機小油門特性能夠滿足規范要求。

圖6 飛機縱向加速度時間歷程曲線
3 結束語
采用基于系統辨識法的發動機建模方法,將發動機等效為一階傳遞函數形式,辨識結果與試驗數據最優適配度高,建模方法行之有效,模型準確。基于Matlab/Simulink的飛機小油門響應特性仿真,計算了飛機進場下滑時不同低壓轉速下飛機對油門指令的響應能力,仿真結果表明低壓轉速在NL3滿足規范要求,轉速NL4推油門飛機縱向加速度增量小,不滿足規范要求,轉速NL2和轉速NL1收油門飛機響應慢,不滿足規范要求。
本文通過仿真計算給出了滿足規范要求的下滑轉速,由于實際推力需經進排氣修正、大氣修正,且在同等重量、表速和下滑角的情況下,在一定轉速范圍內飛機小油門響應與油門桿階躍操縱量有關,因此實際滿足規范要求的轉速范圍需通過鑒定試飛方式給出,但本文研究結果對飛機減速板開度設計及減速板組合狀態設計具有重大的參考價值。
猜你喜歡
北部灣大學學報(2022年1期)2022-06-22 04:58:38
北部灣大學學報(2022年2期)2022-06-21 11:44:36
環球時報(2022-05-30)2022-05-30 15:16:57
現代儀器與醫療(2021年4期)2021-11-05 08:25:08
北部灣大學學報(2021年4期)2021-04-28 08:01:04
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
汽車與新動力(2015年1期)2015-02-27 12:11:01