Online hierarchical recognition method for target tactical intention in beyond-visual-range air combat
2022-08-30 14:32:54ZhenYngZhixioSunHiyinPioJihunHungDeyunZhouZhngRen
Defence Technology 2022年8期
Zhen Yng ,Zhi-xio Sun ,Hi-yin Pio ,Ji-hun Hung ,De-yun Zhou ,Zhng Ren
a School of Automation Science and Electrical Engineering,Beihang University,Beijing,100191,China
b Northwestern Polytechnical University,Xi'an,710072,China
c The First Military Representative Office of the Air Force Equipment Department in Chengdu,Chengdu,610091,China
Keywords:Beyond-visual-range (BVR) air combat Tactical intention recognition Hierarchical recognition model Cascaded support vector machine (CSVM)Trajectory decomposition Maneuver element
ABSTRACT Online accurate recognition of target tactical intention in beyond-visual-range (BVR) air combat is an important basis for deep situational awareness and autonomous air combat decision-making,which can create pre-emptive tactical opportunities for the fighter to gain air superiority.The existing methods to solve this problem have some defects such as dependence on empirical knowledge,difficulty in interpreting the recognition results,and inability to meet the requirements of actual air combat.So an online hierarchical recognition method for target tactical intention in BVR air combat based on cascaded support vector machine (CSVM) is proposed in this study.Through the mechanism analysis of BVR air combat,the instantaneous and cumulative feature information of target trajectory and relative situation information are introduced successively using online automatic decomposition of target trajectory and hierarchical progression.Then the hierarchical recognition model from target maneuver element,tactical maneuver to tactical intention is constructed.The CSVM algorithm is designed for solving this model,and the computational complexity is decomposed by the cascaded structure to overcome the problems of convergence and timeliness when the dimensions and number of training samples are large.Meanwhile,the recognition result of each layer can be used to support the composition analysis and interpretation of target tactical intention.The simulation results show that the proposed method can effectively realize multi-dimensional online accurate recognition of target tactical intention in BVR air combat.
1.Introduction
With the increasing performance of avionics systems and airborne weapons,beyond-visual-range (BVR) air combat has become the main form of fighting for air superiority at present[1,2].Compared with the high-dynamic and intense confrontation of the dogfight,the rhythm of BVR air combat is relatively moderate,and more emphasis is placed on longer-term tactical planning and reasoning rather than fast-paced reactive control strategies.That also makes target tactical intention recognition more feasible,practical,and necessary in BVR air combat [3,4].Online accurate recognition of target tactical intention in BVR air combat is an important basis for deep situational awareness [5,6] and autonomous air combat decision-making [7-9],which can create preemptive tactical opportunities for the fighter to gain air superiority.
Target tactical intention recognition in air combat is a process of data mining and online reasoning.It extracts key feature information from the target motion state obtained by airborne sensors,and perceives the current target maneuver behavior and the relative situation between the two sides as quickly and accurately as possible to gradually dig out the potential tactical intention of the target[10,11].Existing studies on this issue generally classify target intentions into surveillance,reconnaissance,interference,feint,escort,cover,attack,and so on from the perspective of combat mission[11-14].But for actual air combat confrontation process,it is difficult to effectively recognize such intentions only through target trajectory information.More importantly,it is of practical value to recognize the more specific antagonistic behavior intention of the target from the tactical perspective.
The existing research approaches of target tactical intention recognition mainly focus on the application of expert system[15,16],template matching[17-20],Bayesian network[21-25],and neural network [12,13,26-28].
An assessment method of target maneuver intention in BVR air combat was presented in Ref.[15],in which the intention was divided into nine categories by expertise.Feng et al.[16]proposed a flight maneuver recognition method combined with fuzzy control theory and knowledge-based rules.Borck and Alford [17,18] presented a case-based behavior recognition algorithm that annotates an UAV's behaviors in BVR air combat.Wang [19] and Guo [20]respectively adopted approaches of matching parameter features and singular value decomposition to recognize and standardize maneuvering from flight data.However,expert system and template matching are very difficult to construct the complete knowledge base,template base,and reasoning system for complex air combat.Furthermore,subjective factors also lead to their low evolution and fault tolerance ability.
Considering that the Bayesian network(BN)has excellent causal probabilistic reasoning performance [21],Jin et al.[22] used it to solve the problem of combat intention recognition of aerial targets.A probabilistic reasoning model of target intention was constructed based on variable structure BN in Ref.[23],and this problem was extended in Ref.[24] to cooperative tactical recognition of dualaircraft formation,which was solved by dynamic BN.Dahlbom[25] made a comparative study of dynamic BN and fuzzy logic for recognizing hostile aircraft behaviors.BN adapts to the change of air combat situation through the dynamic updating of network parameters and realizes the uncertain reasoning of target intention.However,its analysis and calculation are complicated,and the determination of prior probability and conditional probability also depends on subjective experience.
Given the limitation of subjective factors in the above methods,some researchers have tried to use neural network[26]to solve the problem.Xue et al.[12] designed panoramic convolutional long short-term memory networks to improve the recognition ability of aerial target combat intention.Through the introduction of the rectified linear unit activation function and adaptive torque estimation optimization algorithm,a combat intention recognition model based on the deep neural network was designed in Ref.[27].Chen et al.[13,28] solved a similar problem by long short-term memory under air combat environments with uncertain and incomplete information.The neural network method can find the regularities from a large amount of complex data of unknown patterns without relying on prior knowledge,but it also has some limitations in convergence and interpretability.
Other applications of above methods include intention recognition of vehicle driving [29],sea-surface target [30],and civil aviation flight [31].There were also some other methods such as support vector machine(SVM)[32,33],decision tree[34]and grey relational analysis [35,36] applied to solve the problem of target intention recognition in air combat.Jia et al.[32]and Xu et al.[33]adopted motion decomposition and improved SVM algorithm for online recognition of air combat maneuver and both achieved ideal recognition results.Similar to the neural network,SVM is a featurebased classification method,which needs to extract the feature parameters of maneuvers,and then use supervised learning to train the corresponding classifier.
For the problem of target tactical intention recognition in confrontation scenario of BVR air combat,the limitations of the above research approaches mainly include the following:
(1) In the air combat confrontation scenario where the target combat mission is clear,the intention recognition focuses more on the specific tactical behavior intention rather than the combat mission intention,which is significant for tactical decision,but there are few studies on this aspect.
(2) Most of the current studies only focus on the target maneuver recognition,without considering its relationship with the situation between the two sides in air combat,which is crucial for the target tactical intention recognition.
(3) Target maneuvers and relative situation information in air combat show the characteristics of dynamic and temporal change.It is unscientific to recognize target intention only based on instantaneous feature information in existing research.
(4) For autonomous air combat decision-making to create preemptive tactical opportunities,target tactical intention recognition needs to be time-sensitive rather than be limited to the analysis and recognition of off-line flight data.
To solve the aforementioned problem,an online hierarchical recognition method for target tactical intention in BVR air combat based on a cascaded support vector machine(CSVM)is proposed in this study.The target tactical intention is decomposed hierarchically.The instantaneous and cumulative feature information of target trajectory and relative situation information are introduced successively through online automatic decomposition of target trajectory.Then the hierarchical recognition model from target maneuver element,tactical maneuver to tactical intention is constructed.The CSVM algorithm is designed for solving this model,and the computational complexity is decomposed by the cascaded structure to overcome the limitations of traditional methods in timeliness,convergence,and interpretability.For the first time in the existing open literature,this research proposes and realizes the online recognition of target intention in BVR air combat from the perspective of tactical behavior.
The rest of this paper is organized as follows.In Section 2,the problem of target tactical intention recognition in BVR air combat is modeled and formulated.The details of the solution algorithm are designed in Section 3.The proposed models and algorithm are demonstrated with simulation experiments in Section 4,followed by conclusions in Section 5.
2.Problem analysis and formulation
2.1.Description of the problem



In view of this,this paper refers to the thinking logic and reasoning mode of pilots when judging air combat situations.The hierarchical recognition architecture is designed based on “Maneuver Element (ME) -Tactical Maneuver (TM) -Tactical Intention(TI)",as shown in Fig.1.
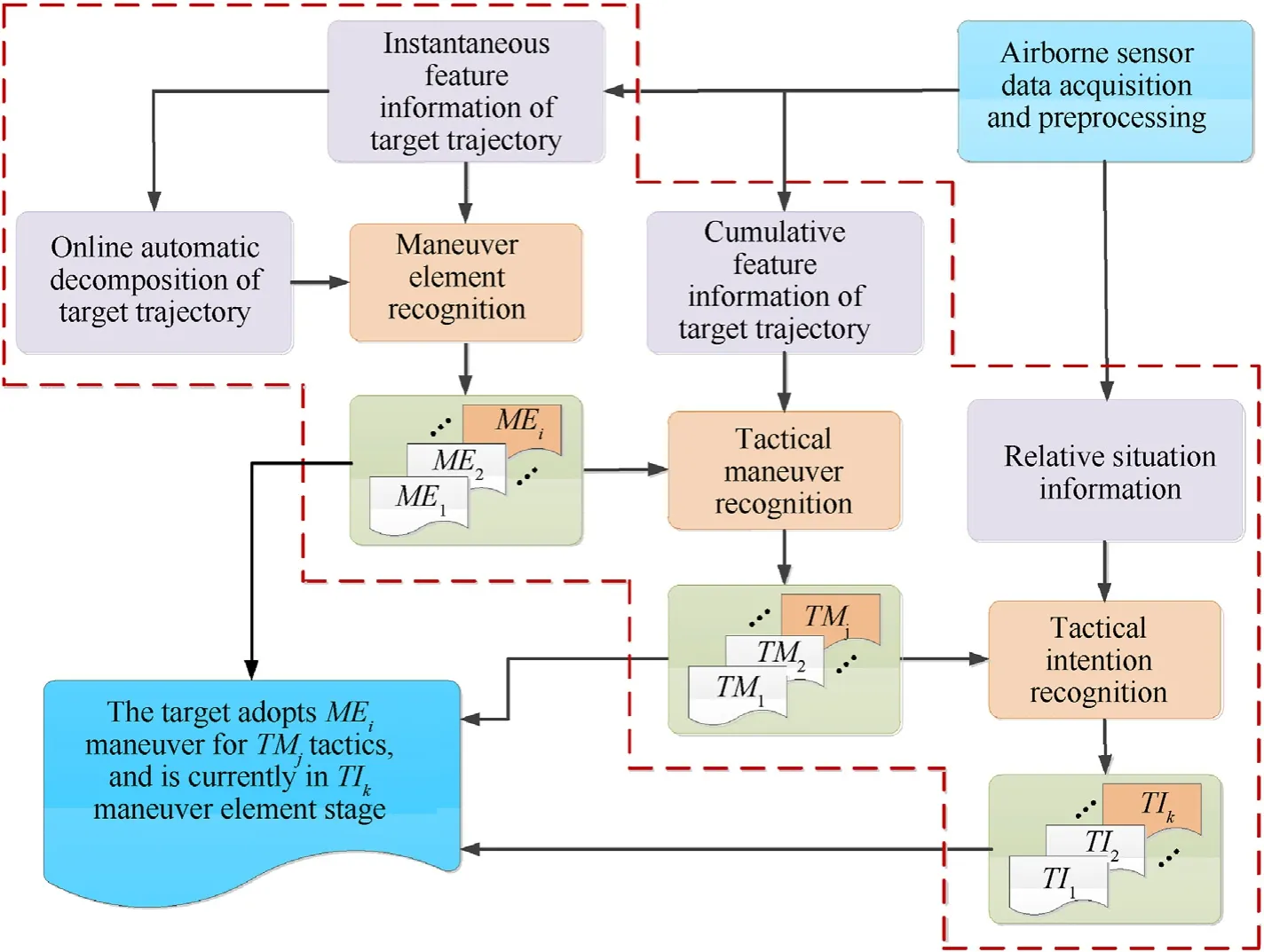
Fig.1.Architectural diagram of hierarchical recognition for target tactical intention in BVR air combat.

Based on the above hierarchical recognition architecture,the mapping function in Eq.(1) can be further expressed as the following hierarchical mapping form.
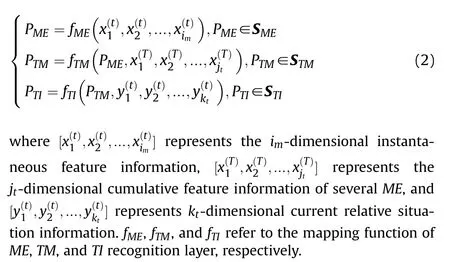
This hierarchical progressive approach not only decomposes the complexity of the traditional target intention recognition model but also supports the composition analysis of target tactical intention with the results of each recognition layer,which has a certain practical guiding significance for air combat tactics.
2.2.Target trajectory features and relative situation information
Target trajectory implies the tactical intention to a large extent.Calculating key motion parameters in target trajectory as feature information is the basis and premise of target tactical intention recognition.

The following coordinate systems are involved in Fig.2,Oxyz,Oxyz,and Oxyz,which represent the concomitant inertial coordinate system of the fighter,the concomitant inertial coordinate system of the target,and the trajectory coordinate system of the target,respectively.vis the fighter velocity vector,vis the target velocity vector,D is the distance vector of the fighter pointing to the target.
According to the above definition,φat t could be described by
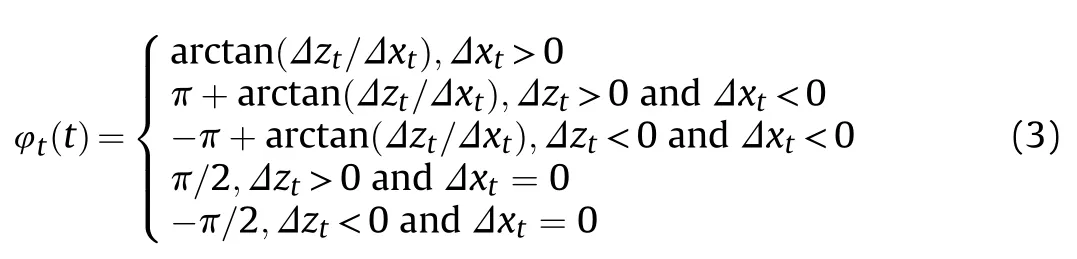
where Δx=x(t)-x(t -h),Δy=y(t)-y(t -h),and Δz=z(t)-z(t -h).[x(t),y(t),z(t)]is the position coordinates of the target in the geographic coordinate system at t.h is the simulation step size(set h=0.01 s).
θat t is given by

Based on this,other instantaneous feature information can be obtained as
Fig.2.Schematic diagram of the relevant motion parameters of the target.
The cumulative feature information of target trajectory are defined as

where tand trepresent the start and end time of a maneuvering process of the target.
According to the geometric relationship in Fig.2,qand qcould be described by
where [v,v,v],[v,v,v],and [D,D,D] are respectively the projections of v,v,and D on the three axes of the geographical coordinate system.Furthermore,the rate of change in distance at t can be expressed as

2.3.Online automatic decomposition strategy of target trajectory
Trajectory decomposition can extract a series of continuous MEs from the target trajectory and represent the trajectory by a discrete ME sequence.Due to the difference of trajectory feature information between MEs,there are obvious decomposition feature points during ME switching.The task of trajectory decomposition is to find the position of the points in the trajectory.Traditional trajectory decomposition strategies generally limit the air combat process to the horizontal plane,and then simply decompose the trajectory into three MEs,namely,straight flight,horizontal left turn,and horizontal right turn.Because of the complexity and diversity of target maneuvers,this two-dimensional assumption obviously cannot meet the needs of target tactical intention recognition in three-dimensional space.
The changes of feature information at decomposition feature points during MEs switching can be summarized into the following four types.That is,the variation trend of φhas changed,the cumulative change of φhas exceeded π/2,the sign of θhas changed,and the variation trend of θhas changed.Using this decomposition strategy,the same ME only needs to sample the target motion state once randomly within several simulation steps after the decomposition feature points,which reduces the sampling frequency and improves the recognition efficiency.The algorithm pseudocode of online automatic decomposition of target trajectory is illustrated as Algorithm 1.
2.4.Hierarchical design of target intention space in BVR air combat
2.4.1.ME set
As the basic element of maneuver,ME should have the characteristics of the minimum unit and covering trajectory.Based on the trajectory shape and flight direction,this paper designs the ME set of BVR air combat as shown in Table 1,which contains 17 types of ME.Convex and concave shape refers to the trajectory shape presented when the target acceleration is downward and upward,respectively.This is mainly caused by the roll of fighter,and in the case of not knowing the target roll angle,it can only be distinguished by the difference of trajectory shape.Their trajectory sketches are shown in Fig.3.

Table 1.The ME set of BVR air combat.

Table 2.The TM set of BVR air combat.

Table 3.The TI set of BVR air combat.
Since it is rare to use spiral climbing or diving in BVR air combat,this paper does not consider such cases.For any two ME MEand ME,if MEand MEcan be connected continuously,let l=1,otherwise,let l=0.According to the principle of flight dynamics,the connection matrix L between MEs can be obtained as

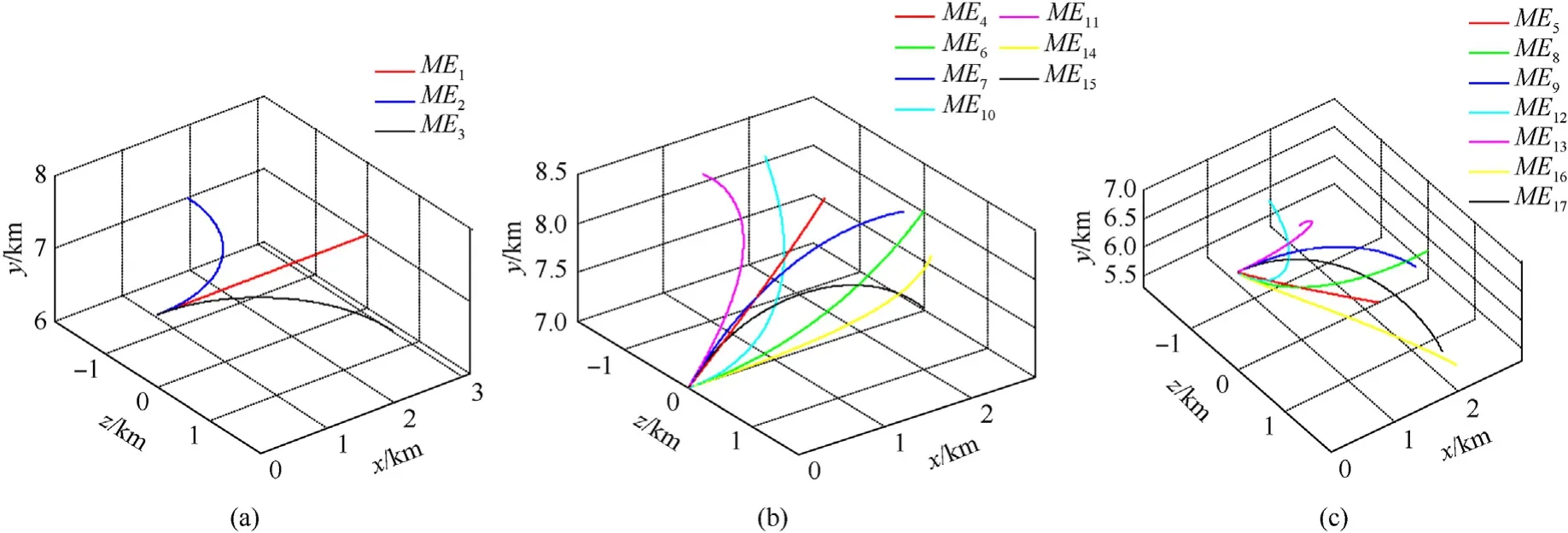
Fig.3.Trajectory sketches of MEs: (a) Horizontal MEs;(b) Climbing MEs;(c) Diving MEs.
2.4.2.TM set
TM of fighters in air combat is mainly for the realization of specific tactical intentions.Based on a large number of training and actual combat experience in air combat,a set of commonly used BVR air combat tactical maneuvers are summarized.This paper designs the TM set of BVR air combat as shown in Table 2,which contains 15 types of TM.Each TM can be formed by connecting all or part of the MEs in the corresponding feasible ME composition in Table 2.It should be noted that horizontal straight flight is one of the most common flight states in BVR air combat,which is still included in the TM set in this paper.
2.4.3.TI set
The basic mode of BVR air combat can generally be described as the following process.Firstly,the fighter enters the battle airspace under the guidance of the command center,and when it reaches an appropriate distance,the airborne radar is turned on to search and track the target.Then the fighter carries out attack guidance and aiming,and when the target enters the appropriate position in the missile attack area,the missile is launched.Depending on the air combat situation,the fighter can choose to maneuver defensively,continue to attack,or quickly turn out of engagement.For the latter,the fighter generally takes evasive maneuvers against enemy missiles.After evading,the fighter will turn back again for the next round of engagement.A complete process described above is called a BVR air combat period,and BVR air combat is actually composed of several such periods [37].
Based on the above characteristics analysis of BVR air combat,this paper designs the TI set from the tactical perspective as shown in Table 3,which contains 5 types of TI.
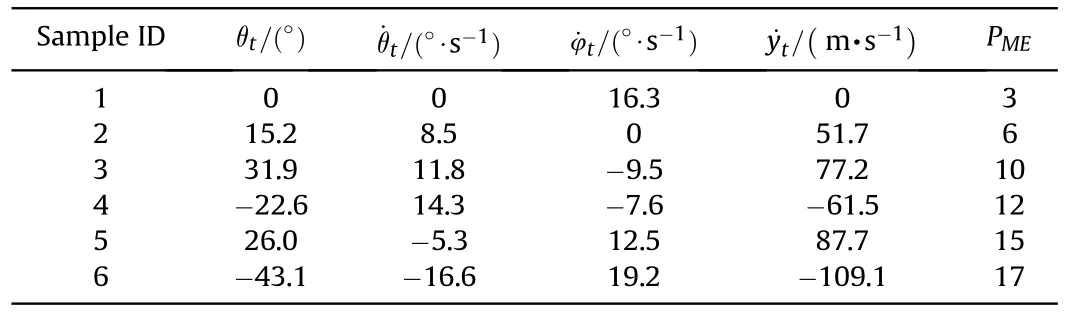
Table 4.Examples of ME training samples.
3.Solution algorithm design
3.1.CSVM multi-classifier architecture
SVM is a machine learning method based on the structural risk minimization principle of statistical learning theory.The basic idea is to construct an optimal hyperplane in the sample space to maximize the distance between the hyperplane and different sample sets [38].However,there are still some problems in using SVM directly to solve the intention recognition model designed in this paper,which are mainly reflected in the application of cumulative feature information of trajectory,convergence and timeliness under high dimensional feature information,interpretability of implicit mapping mechanism,adaptability of multi-classification problems,etc.
To address the problem,this paper designs a CSVM multiclassifier for target tactical intention recognition in BVR air combat.Its theoretical architecture is shown in Fig.4.
5.He did not know how wisely God apportions riches and poverty:Tatar points out that this phrase was added by the Brothers (194). The change makes the tale less subversive19 (Tatar 194).Return to place in story.
3.2.Optimal classification function in CSVM
Aiming at the binary classification problem,the training sample is set as{(x,y),(x,y),…,(x,y)},y?{ -1,+1},i=1,2,…,m.A normal vector w and a constant displacement scalar b are selected to construct a hyperplane wx+b=0 that maximizes its distance from different sample sets.That is to solve the following optimization problem:
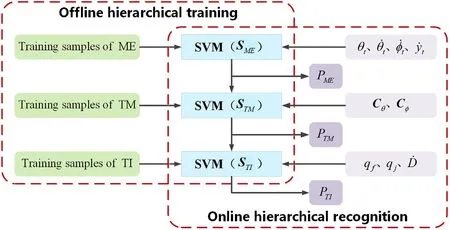
Fig.4.Architecture of CSVM multi-classifier for target tactical intention recognition in BVR air combat.

Eq.(14)was solved by the Lagrange multiplier method,and the Lagrange coefficient was set as α=(α,α,…,α),α>0.Then,the Lagrange function of Eq.(14)is transformed into a dual problem.In addition,in view of the linear inseparability in this paper,the original sample space is mapped to the high-dimensional feature space by a nonlinear mapping method.The kernel function K(x,x)=φ(x)φ(x)is used to replace the dot product calculation in the high-dimensional feature space to greatly reduce computational complexity.Therefore,Eq.(14) is transformed into
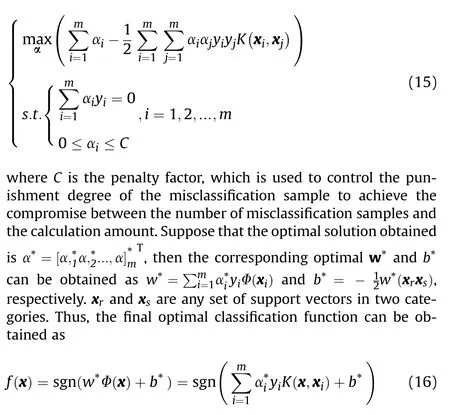
The radial basis function is adopted as the kernel function in this paper,and its form is as follows

where σ is the width parameter of the K(x,x),which controls the radial operating range of the kernel function.
Based on the above optimal classification function,the binary classifiers for each recognition layer of CSVM in Fig.4 can be constructed.Multiple classifiers of each layer can be generated by binary classifiers extension.In this paper,the “one-versus-one”(OVO)method is used for the extension[38].In the training of the OVO method,any two types of samples will train a binary classifier,and n(n-1)/2 binary classifiers will be constructed.During the test,the category label that appears most in the output of all classifiers is taken as the classification result of this sample.Compared with other extension methods,the OVO method has higher training efficiency and lower design complexity of training samples in this paper.It is easy to implement and more suitable for the algorithm architecture in Fig.4.
3.3.Recognition logic and training samples
In Fig.4,the recognition logic of the ME and TI layer is relatively clear.However,as an intermediate layer,the recognition logic of TM is more complicated,because it involves the segmentation and combination recognition of multiple MEs.According to the analysis of the TM set,each TM can be described and determined by four MEs at most,and some TMs are composed of three or two MEs.Therefore,it is necessary to design different SVMs and corresponding training samples according to different characteristics of TMs.The recognition logic of TM is designed as shown in Fig.5.
The input of TM recognition layer SVM(S)is the serial number of the last four consecutive MEs,P,and their cumulative feature information,C,C.The input information is firstly used to recognize TMs containing four MEs through SVM_Ⅳ,mainly including TM,TM,TM,and TM.If the test sample belongs to this category,Pwill be directly recognized;otherwise,it will be recognized as non-four-segment TMs,and three-segment TMs will be recognized by SVM_III,mainly including TM-TM,and TM-TM.By parity of reasoning,all two-segment TMs except TMare recognized by SVM_II.If the test sample does not belong to the above three types of TMs,the nearest Pis directly output,which means that there are no TMs at present.It should be noted that the recognition priority of the four-segment TMs is higher than that of the three-segment and two-segment in the process of TM recognition,successively.The input test samples of SVM_Ⅳ,SVM_III,and SVM_II are the latest four-segment,three-segment,and twosegment MEs information,respectively.

For TM training samples,considering the particularity of segmentation and combination,four-segment,three-segment,and two-segment TMs should be designed respectively.According to the mapping logic of P,C,and Cof the last four consecutive MEs to P,some examples of TM (four-segment) training samples are given as shown in Table 5.
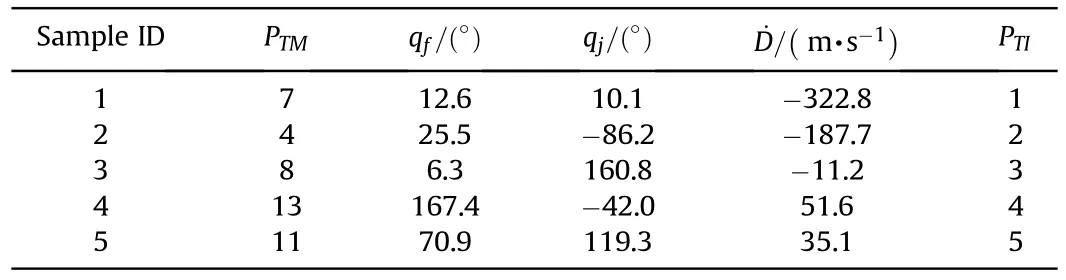
Table 6.Examples of TI training samples.
P,C,and C(i=1,2,3,4) are ME information in the segment i.1 to 4 in Prepresent TM,TM,TM,and TM,respectively,which all belong to the positive type.5 indicates that the four-segment ME combination does not belong to the four types of TMs and belongs to the negative type.The negative type sample is mainly composed of two parts.One is to randomly add a feasible first segment of ME on the basis of the three-segment TM sample,and its combination does not belong to the above four TMs.The other part is also composed of four segments of random feasible ME on the basis of excluding the above four TMs.Then the negative sample data is resampled by the undersampling method to balance the number of positive and negative samples.
The form of TM (three-segment) training sample is similar to that in Table 5,except that the ME information of the first segment is deleted.Then 1 to 9 in Prepresent TM-TM,and TM-TM,respectively,which all belong to the positive type.10 indicates the negative type,and the process of negative samples generation and undersampling is similar to the above.Similarly,on the basis of Table 5,the form of TM(two-segment)training sample can be obtained by deleting the first and second segments of ME.


Table 5.Examples of TM (four-segment) training samples.
To avoid the model training error caused by the difference in the value range of variables,the training samples need to be normalized by:

where δ is minimal constant(set as δ=10)and X is the original value of a variable.Xand Xare the minimum and maximum values of X in training samples,respectively.Y is the normalized sample value of X.
3.4.Model parameter analysis and optimization
CSVM involves two crucial model parameters:the penalty factor C and the parameter of radial basis kernel function γ(γ=1/(2σ)).C represents the tolerance of classification error.The higher it is,the more likely it is to lead to the over-fitting problem,otherwise,it is easy to cause the problem of under-fitting.γ directly affects the scope of the kernel function of each support vector.The larger γ is,the more the kernel function will act near the sample data of the support vector,which is easy to cause the serious over-fitting problem.On the contrary,the greater the smoothing effect,thus reducing the recognition accuracy of the model.
Therefore,in this paper,the optimal model parameter combination with the highest performance is determined by the cross validation method and grid parameter optimization method.When the performance is the same,a group of model parameters with smaller C is selected to reduce the number of support vectors and computational complexity.

4.Simulation and analysis
4.1.Simulation settings
In this section,simulations are used to demonstrate the feasibility and effectiveness of the proposed method in this paper.All simulation experiments were performed in MATLAB R2012a environment on a PC with Intel Core i7-2.5 GHz CPU and 4 GB memory.
The parameter optimization method mentioned above is used to optimize the parameter combination of each layer in CSVM.In the ME recognition model,set cmin=γmin=-3 and cmax=γmax=6.In the TM(four-segment)recognition model,set cmin=γmin=-4 and cmax=γmax=4.Set cstep=γstep=0.5.The contour diagrams of the parameter optimization process of the two recognition models are shown in Fig.6.The parameter optimization processes of other recognition models are similar to this,and the description is not expanded.
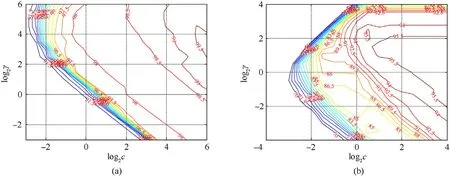
Fig.6.The contour diagrams of the parameter optimization process of the recognition models: (a) ME recognition model parameters;(b) TM (four-segment) recognition model parameters.
To facilitate representation,parameters C and γ in Fig.6 are taken in logarithmic form with base 2,and the value of contour line is the average recognition accuracy of the model under a certain set of parameters.It can be seen from Fig.6 that the highest recognition accuracy of ME and TM(four-segment)recognition models are 99.5% and 95.5%,respectively.Based on this,the optimal parameter combination of the ME recognition model is set as C=16,γ=8.That of TM (four-segment) recognition model is set as C=2,γ=2.2.Similar to the parameter optimization process mentioned above,the optimal parameter combination of TM(three-segment),TM(two-segment),and TI recognition model are set as C=1.4,γ=11.3,C=1.6,γ=2.5,and C=4,γ=6.2,respectively.
Based on the above simulation environment and parameter settings,the results of ME,TM,and TI recognition are verified and analyzed respectively by simulation experiments.
4.2.Analysis of ME recognition results
Firstly,a large number of target trajectories with different initial trajectory angles,velocity,altitude,and control variables are generated based on the flight simulation program.Theinstantaneous feature information of target trajectory is calculated according to the target motion states of each simulation step size.Each group of feature information corresponds to a ME type tag.In the form of sample in Table 4,2551 groups of data are randomly selected as the training set and 1310 groups of data as the test set.Then,the SVM algorithm is compared with the classical radial basis function(RBF)network algorithm[39].The RBF network is a threelayer forward network with a single hidden layer.It uses RBF as the“basis” of the hidden element to form the hidden layer space,and transforms the low-dimensional mode input data into the highdimensional space,so that the linear non-separable problems in the low-dimensional space can be linearly separable in the highdimensional space.With its excellent classification ability,it is widely used in pattern recognition.The sample settings and recognition results of MEs are shown in Table 7.
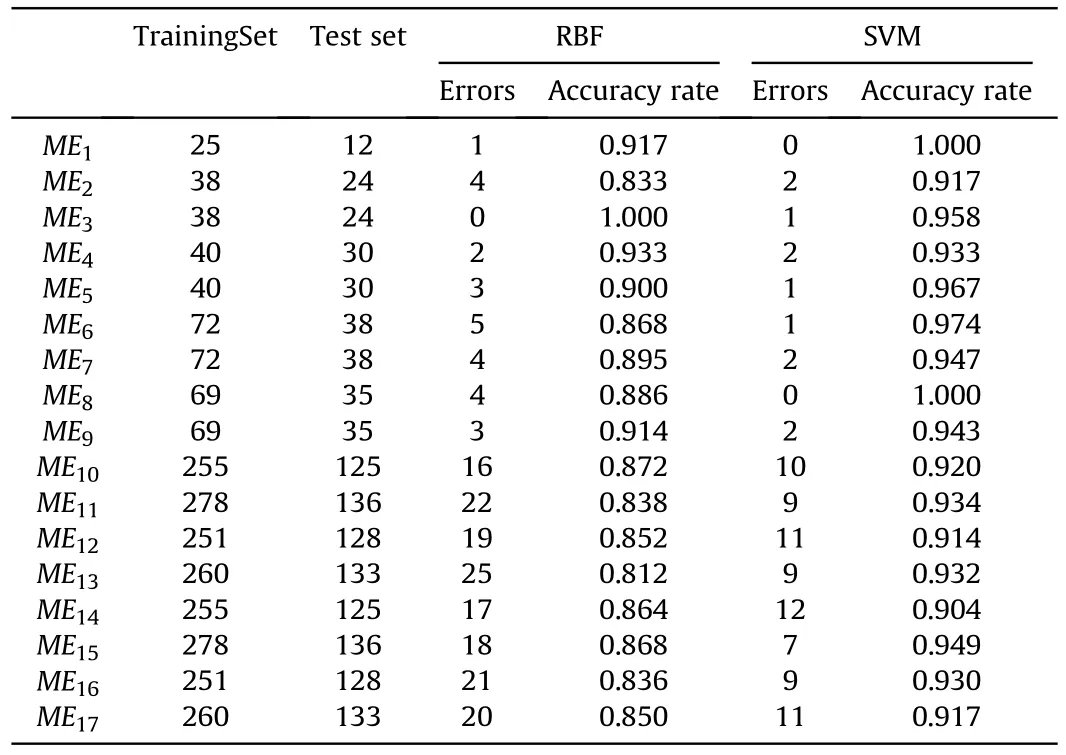
Table 7.ME sample settings and recognition results.
It can be seen from Table 7 that the average recognition accuracy rate of target ME using SVM is 94.35%,which is significantly higher than that of 87.87% in the RBF network.Some of the misclassification cases are caused by the test data coming from the transformed boundary of ME.These errors can be reduced to some extent by introducing the automatic decomposition strategy of target trajectory in the online ME recognition.Compared with the traditional RBF method,the position,number,and network connection weights of function centers of SVM using radial basis kernel function are automatically determined based on sample data in the training process,avoiding the heuristic structure commonly used in the RBF method and no longer relying on empirical knowledge.In addition,the SVM obtains the optimal solution under existing information,rather than the optimal solution when samples tend to infinity,and its computational complexity has nothing to do with data dimension.According to the test results in Table 7,it can meet the accuracy requirement of the first-layer recognition model in the CSVM algorithm architecture.
4.3.Analysis of TM recognition results
The training and test set of TM are generated according to the sample form in Table 5,and tactical maneuvers are recognized based on the logical structure in Fig.5.The sample settings and recognition results of TMs are shown in Table 8.
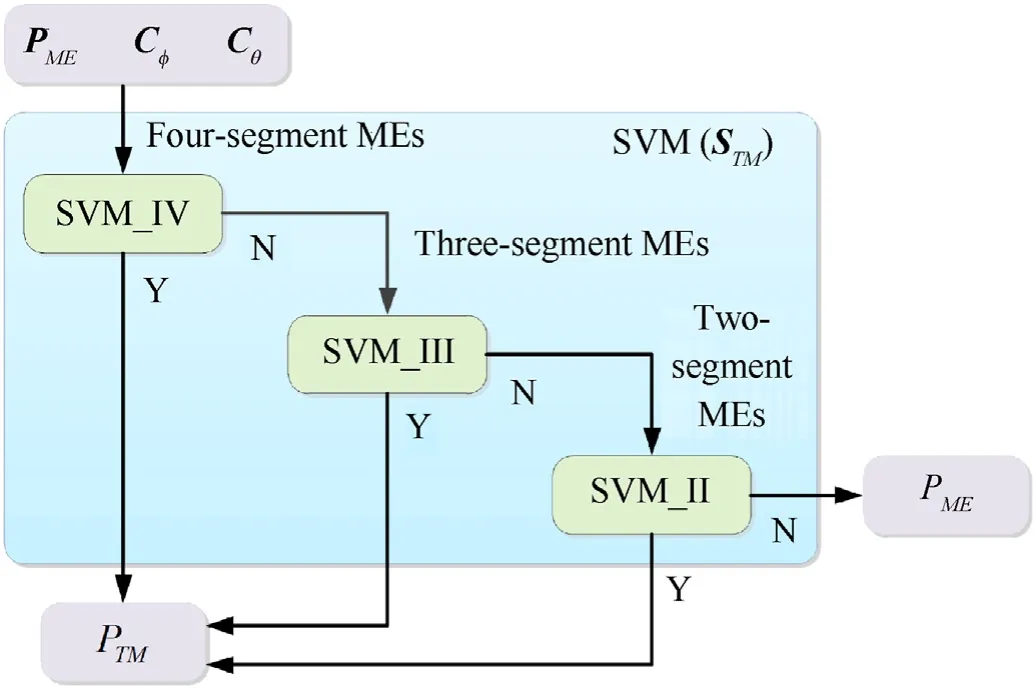
Fig.5.The recognition logic of TM.
The four-segment,three-segment,and two-segment TM are trained and tested respectively.According to the test results in Table 8,the average recognition accuracy rate of four-segment,three-segment,and two-segment TM are 92.87%,93.37%,and 95.85%,respectively,which can meet the accuracy requirement of the second-layer recognition model in the CSVM algorithm architecture.

It can be seen from Fig.7 and Fig.8 that the target successively performed a series of TMs such as vertical half-loop,steep climb,horizontal S-shaped maneuver,left abort maneuver,barrel roll,and left chandelle,with a certain horizontal straight flight as maneuver connection.The sudden change of trajectory parameters in Fig.8 is due to the constraint of the definition range of trajectory angle.According to the proposed online automatic decomposition strategy of target trajectory,some decomposition feature points are obtained accurately as shown in Fig.7,and it has a good online ME segmentation function.Online recognition of target ME and TM in Fig.7 is carried out based on the designed hierarchical recognition model and CSVM algorithm,and obtained recognition results are shown in Table 9 and Table 10 respectively.
To avoid the influence on the recognition result caused by the fluctuation of the trajectory information when the target ME is transformed,the target motion state is sampled at several simulation steps after the decomposition feature point.The recognition time of target ME is all within 0.1 s after the actual start of ME.This delay includes the calculation time of the recognition model and the simulation steps waiting to reduce the influence of the trajectory information fluctuation.Furthermore,the recognition time of TM is related to ME composition,and the recognition model needs a certain ME sequence to judge the occurrence of TM.For example,the shortest recognition delay is only 0.1 s for TM,and the longest recognition delay is 11.1 s for TM.
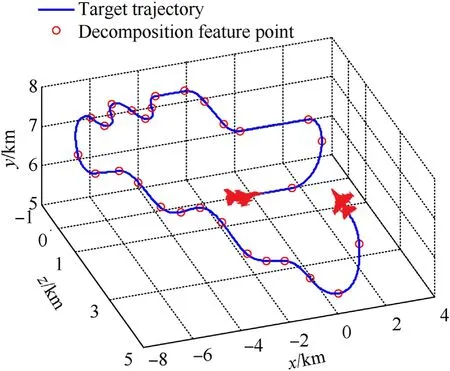
Fig.7.Target trajectory and decomposition feature points.
It can be seen from Table 9 and Table 10 that the types and timing of target ME and TM are decomposed and recognized accurately,which conforms to the actual situation and achieves the expected effect of online hierarchical recognition.Furthermore,the recognition model can output the recognition results some time before the target completes a TM to realize advance recognition.
4.4.Analysis of TI recognition results
Target TI recognition is based on target ME and TM recognition results to further judge target tactics by introducing relative situation information.According to the BVR air combat simulation program,a large number of antagonistic trajectories for both sides are generated,and P,q,q,.D,and Pare given according to recognition and calculation.In the form of sample in Table 6,3142groups of data are randomly selected as the training set and 950 groups of data as the test set.The sample settings and recognition results of TIs are shown in Table 11.
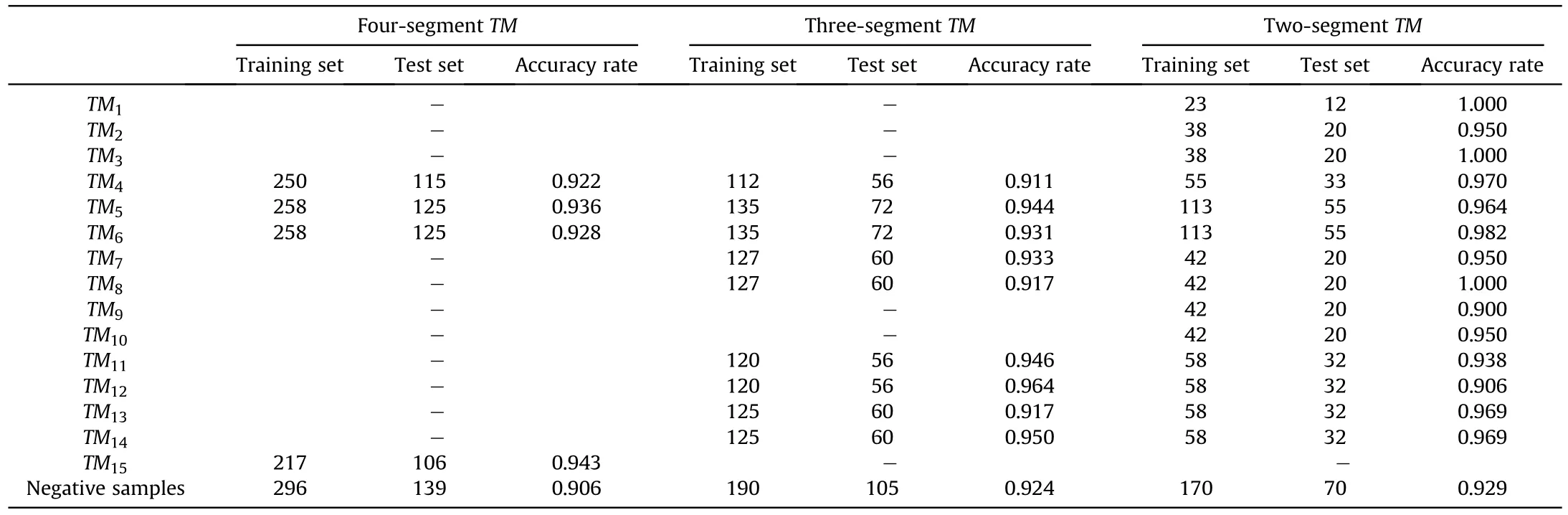
Table 8.TM sample settings and recognition results.
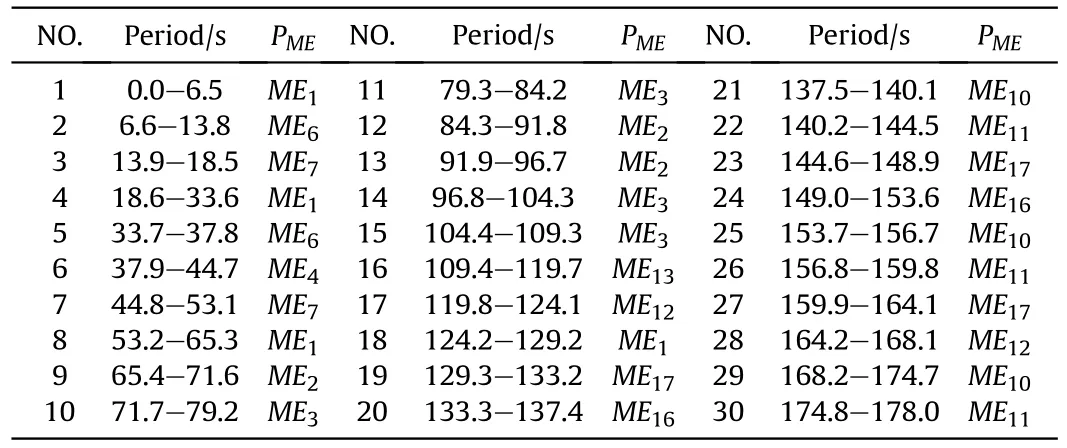
Table 9.Results of online target trajectory decomposition and ME recognition.
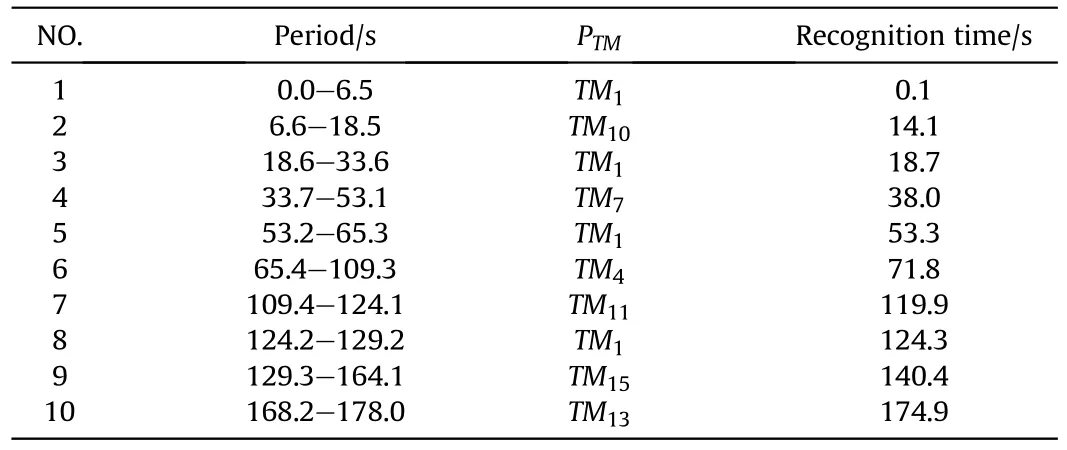
Table 10.Results of online recognition of target TM.
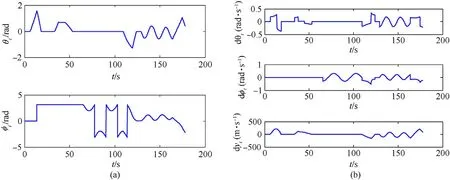
Fig.8.Curves of some target trajectory parameters over time: (a) Curves of parameters θt and φt;(b) Curves of parameters ,,and
As can be seen from Table 11,as the last-layer recognition model in CSVM algorithm architecture,the average recognition accuracy of target TI is 93.24%,and the expected model training effect has been achieved on the whole.
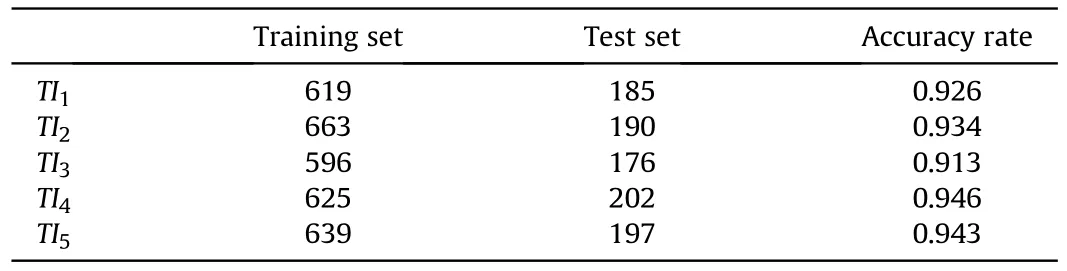
Table 11.TI sample settings and recognition results.

Fig.9 shows that the proposed online automatic decomposition strategy generates 34 decomposition feature points,and the target trajectory is decomposed into 35 MEs.It can be seen from Fig.10 and Fig.11 that the target successively performed a series of TMs such as vertical half-loop,steep climb,horizontal S-shaped maneuver,right abort maneuver,barrel roll,and right chandelle.Combined with the trajectories of the two sides,it can be seen that the two sides roughly experienced the air combat process from the fighter pursuing the target,the two sides' offensive confrontation to the beginning of the second round of offensive confrontation,which includes a complete BVR air combat period.
Based on the recognition model of each layer obtained from offline training and testing in the above simulation experiments,the online hierarchical recognition of target ME,TM,and TI in Fig.9 is carried out,and the recognition results are shown in Fig.12.
It should be noted that the target TI recognition time is synchronized with the TM.After the TM is recognized,the recognition time of TM and TI can be extended forward to the starting time of corresponding MEs according to the composition characteristics of MEs and the recognition results of MEs,thus presenting a complete recognition result close to the actual time axis.It can be seen from Fig.12 that the types and timing of target ME,TM,and TI are decomposed and recognized accurately,which conforms to the actual situation and achieves the expected effect of online hierarchical recognition.Simulation experiments further verify the feasibility and effectiveness of the online hierarchical target tactical intention recognition model and the CSVM algorithm proposed in this paper.
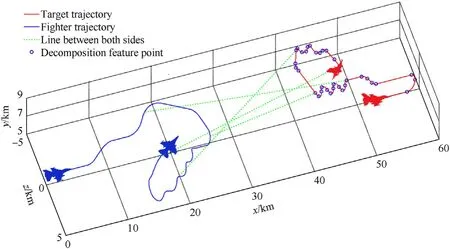
Fig.9.Three-dimensional trajectories of both sides in a simulated scene of BVR air combat.
Fig.10.Curves of some target trajectory parameters over time: (a) Curves of parameters θt and φt;(b) Curves of parameters ,,and.
Fig.11.Curves of some fighter trajectory parameters and relative situation information over time: (a) Curves of parameters θu and φu;(b) Curves of parameters qf, qj,and
Fig.12.Results of online hierarchical recognition of target ME, TM and TI: (a) ME recognition results;(b) TM recognition results;(c) TI recognition results.
5.Conclusions
By analyzing the mechanism of BVR air combat,an online hierarchical recognition method for target TI in BVR air combat is proposed.Based on the results and analysis of the above simulations,the main conclusions can be drawn as follows.
(1) The target TI is decomposed hierarchically.The instantaneous and cumulative feature information of target trajectory and relative situation information are introduced successively through online automatic decomposition of target trajectory.Then the hierarchical recognition model from target ME,TM to TI is constructed.
(2) The CSVM algorithm is designed for solving the hierarchical recognition model,and the computational complexity is decomposed by the cascaded structure to overcome the limitations of traditional methods in timeliness,convergence,and interpretability.Meanwhile,the recognition result of each layer can be used to support the composition analysis and interpretation of target TI.
(3) This research realized the online accurate recognition of target TI in BVR air combat from the perspective of tactical behavior,which can create pre-emptive tactical opportunities for the fighter,thus laying a foundation for improving the decision-making level of autonomous air combat and gaining air superiority.
Moreover,considering the target cooperative tactical intention recognition in multi-aircraft air combat scenario and uncertain and incomplete target information will be the focus and direction of future research.
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
The authors gratefully acknowledge the support of the National Natural Science Foundation of China under Grant No.62076204 and Grant No.61612385,in part by the Postdoctoral Science Foundation of China under Grants No.2021M700337,and in part by the Fundamental Research Funds for the Central Universities under Grant No.3102019ZX016.

- Defence Technology的其它文章
- Experimental study on propagation characteristics of rotating detonation wave with kerosene fuel-rich gas
- Adaptive robust control for triple avoidance -striking -arrival performance of uncertain tank mechanical systems
- Experimental study on WFeNiMo high-entropy alloy projectile penetrating semi-infinite steel target
- Numerical investigation of a muzzle multiphase flow field using two underwater launch methods
- Shock wave and bubble characteristics of underwater array explosion of charges
- A micro-chip exploding foil initiator based on printed circuit board technology