次聲信號處理軟件設計與實現
2022-08-25 08:44:40劉守文王志峰楊立學
電視技術 2022年8期
劉守文,王志峰,楊立學
(中國電子科技集團公司第三研究所,北京 100015)
0 引 言
次聲信號處理系統由多個次聲探測陣組成,每個次聲臺陣包含3~5個次聲陣元[1]。次聲探測陣的每個次聲陣元通過中心站將原始數據及設備狀態上傳至次聲信號處理軟件進行處理。次聲信號探測系統的組成如圖1所示。
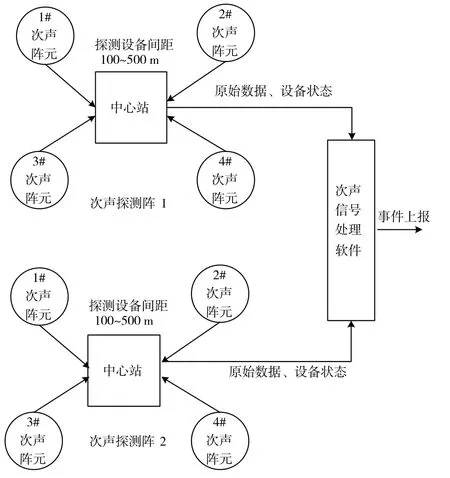
圖1 次聲信號處理系統組成
1 軟件組成與功能
次聲信號處理軟件主要包括次聲臺陣參數配置、次聲數據接收與存儲、次聲信號算法處理、數據綜合展示、設備狀態監控、數據庫管理以及人工干預研判分析等模塊,軟件組成如圖2所示。
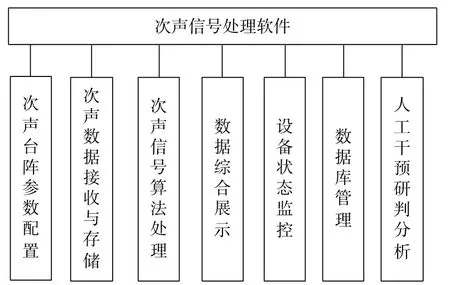
圖2 次聲信號處理軟件組成圖
2 軟件處理流程
次聲信號處理軟件的工作流程如圖3所示。軟件運行后,需登錄和連接遠端探測設備,設置各臺站參數(如臺陣編號、傳感器靈敏度、數采轉換因子等),連接成功后,軟件將自動、實時地接收次聲信號數據,并存儲數據文件到磁盤中。軟件針對實時數據流通過次聲信號算法處理得到告警信息,告警信息一方面錄入數據庫,另一方面生成文字報。軟件基于數據庫可實現歷史事件查詢操作,通過遠程操控操作可重啟設備或進行遠程數據下載。
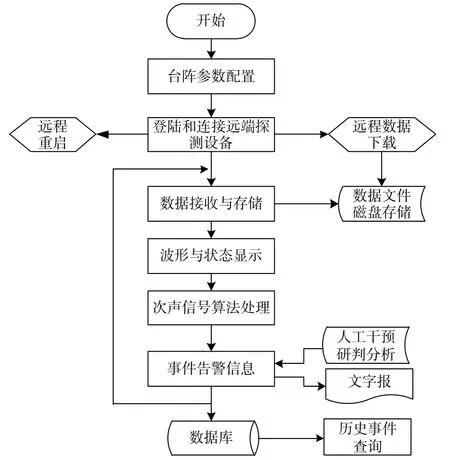
圖3 軟件處理流程
3 軟件模塊設計實現
3.1 次聲臺陣參數配置
次聲臺陣參數配置模塊的主要功能是對臺陣的相關參數進行配置管理,主要包括臺陣名稱、臺陣編碼的配置及每個次聲臺陣下面次聲設備IP地址及端口號等信息。軟件通過XML配置文件的形式,對次聲臺陣參數進行快速存儲和查詢[2]。
參數配置的流程如圖4所示。首先是默認(歷史)參數顯示,其次進行手動參數輸入,軟件對輸入的參數進行合規判定,避免出現系統錯誤。如果參數設置違規,進行參數違規提示[3];如果參數設置合規,則進行內存參數更改,將設置的參數寫入XML配置文件。最后進行參數設置成功提示。
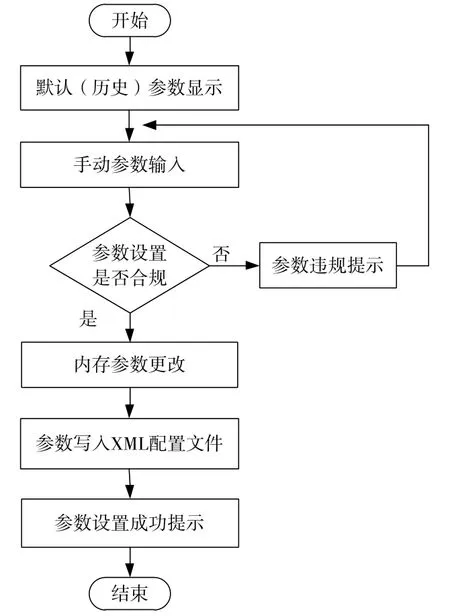
圖4 臺陣參數配置流程
3.2 次聲數據接收與存儲
次聲數據的實時接收采用可靠傳輸的TCP/IP協議,由每一個臺陣的次聲陣元獨立的數據接收線程,實現可靠穩定的網絡傳輸[4]。數據的實時接收流程如圖5所示,主要包括網絡數據接收、數據幀幀頭查找、數據解析、數據校驗和判定、數據顯示和存儲等階段。
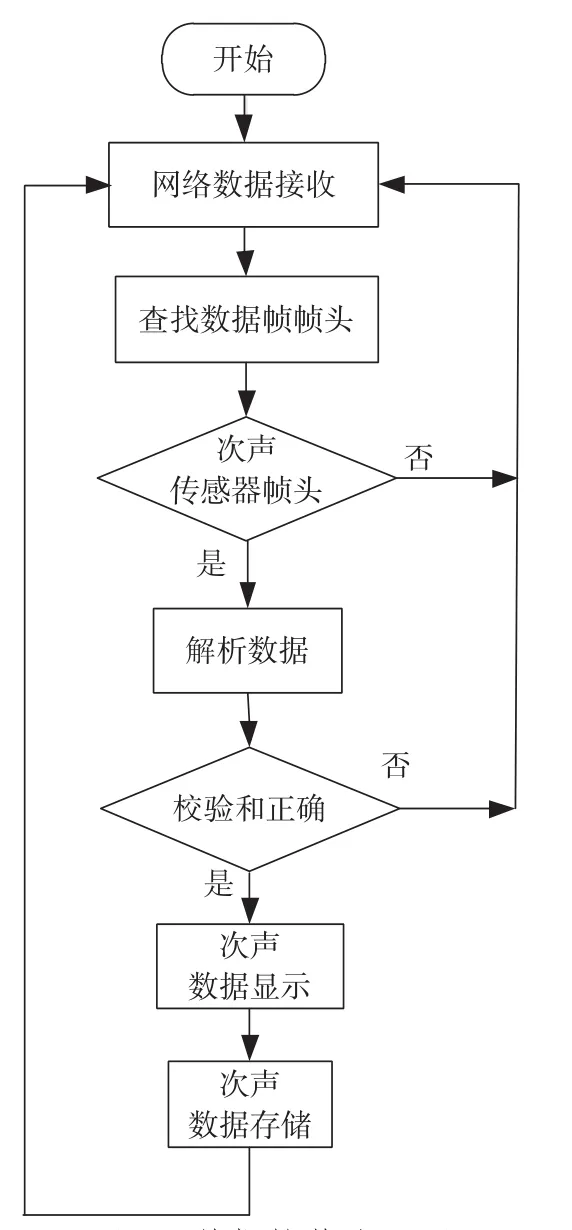
圖5 數據接收流程圖
3.3 設備狀態監控
軟件對探測設備的狀態進行實時檢測,判斷探測設備的網絡狀態、設備電壓、設備溫度以及SD卡等是否正常。當設備狀態產生異常,軟件界面上相應的設備指示燈會發生閃爍并發出蜂鳴器報警,相應地會產生設備狀態異常記錄并更新至數據庫[5]。
后期人員對設備的維護與記錄也可相應地填寫至設備狀態維護數據庫中。運行狀態監控流程如圖6所示。

圖6 碰撞檢測流程
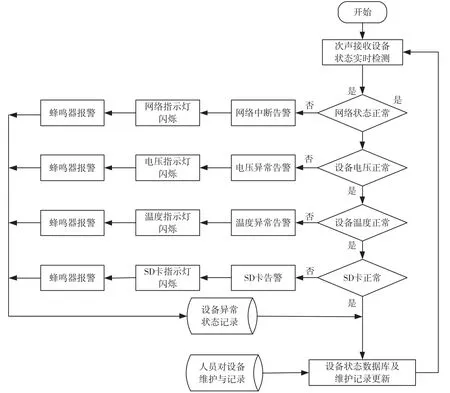
圖6 數據接收流程圖
3.4 次聲信號處理算法及實現
逐次多通道互相關(Progressive Multi-Channal-Correlation,PMCC)算法是一種有效的次聲信號檢測定向算法[6],利用了次聲事件信號在不同通道的相干性。而噪聲則不具備這一特性[7]。
作為一種基于相關的檢測器,PMCC假設次聲事件距離探測臺陣足夠遠,因而可將次聲波視為平面波[8]。平面波到達一個次聲陣元相對于另一個次聲陣元的時延,可利用兩個臺站測量到的次聲信號間的互相關函數獲得。對于一個由三個次聲陣元i,j,k組成的次聲臺陣,它們之間的時延滿足閉環關系,即:

式中:Δtij表示次聲波到達第i個陣元和第j個陣元的時間差,Δtjk表示次聲波到達第j個陣元和第k個陣元的時間差,Δtkj表示次聲波到達第k個陣元和第i個陣元的時間差。
然而,在存在噪聲的情況下,由于隨機的組合互相關計算是不準確的,因而時延和可能不會正好等于0。對于包含N個次聲陣元的臺陣,定義其一致性為任意3個臺站時延閉環和的平均值,即:

式中:rijk=Δtij+Δtjk+Δtkj。如果計算出的一致性小于設定的閾值(接近0的數值),則判定為次聲事件。
在判定為次聲事件后,可根據事件延遲估計出次聲信號的方位角和聲速。采用三角定位法,可確定平面上目標和子臺陣中心的連線與正北方向的夾角,計算公式為

式中:θ為目標方位,(x1,y1),(x2,y2),(x3,y3)為三個臺站的平面坐標,τ12為目標聲到臺站1和臺站2的時間差,其他符號類似。速度可根據由角度確定的波程差除以時延得到。因此,與其他檢測算法相比,PMCC算法除了能夠檢測出信號外,還能確定信號的方位角和傳播速度。
算法運算流程如圖7所示。首先,對多通道信號進行有一定重疊的短時窗劃分,并通過帶通濾波器組濾波;其次,以三點陣為基本單元計算平均的閉環時間差、方向角及速度;最后,對滿足閉環時間差約束的時頻單元按頻率、事件、方向角及速度進行聚類,如果聚類得到多個簇,每個簇對應1個目標事件。每個事件信息包括到達時間估計、方位角估計以及視速度估計。
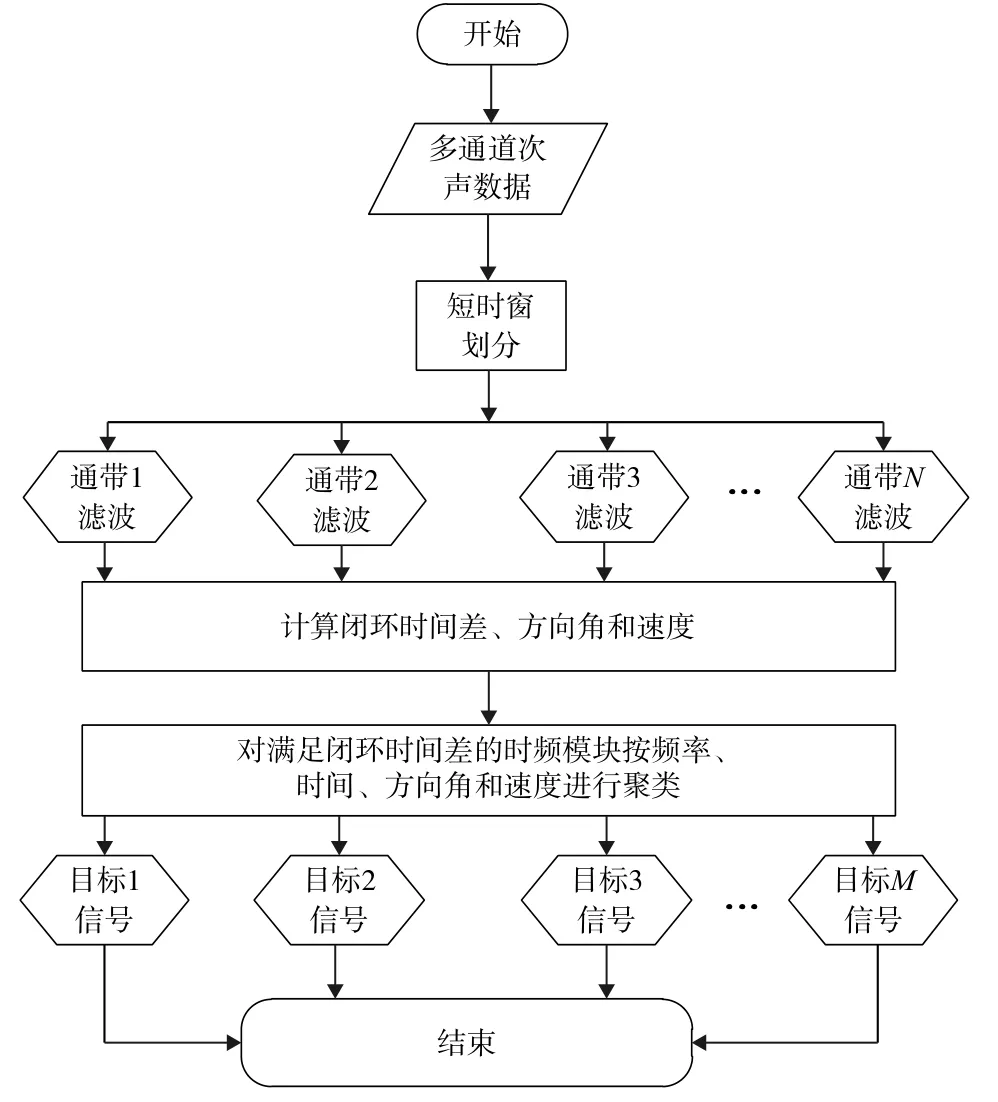
圖7 PMCC算法流程圖
圖8和圖9顯示了1段長度為2 h的連續波形的PMCC檢測結果。圖8為每個時間-頻率點的方位角分布,圖9為每個時間-頻率點的水平速度分布。圖8和圖9均包含6個“簇”,對應6個事件。
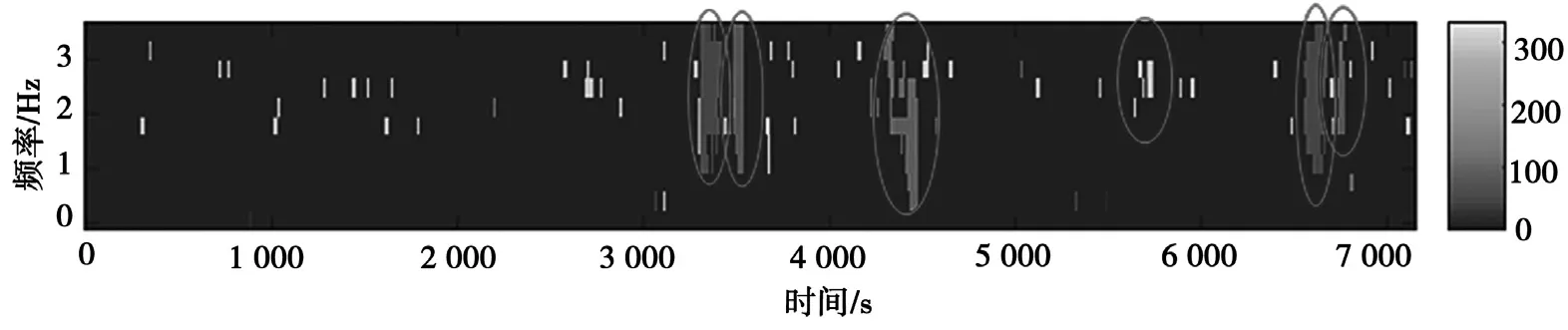
圖8 PMCC檢測方位角分布結果圖
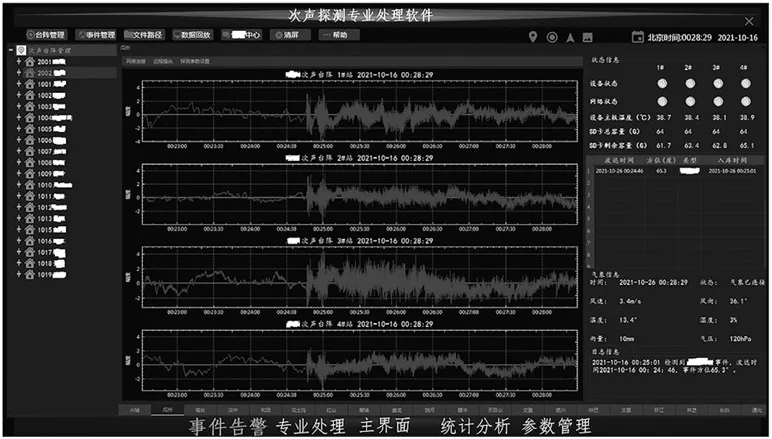
圖9 實時波形顯示
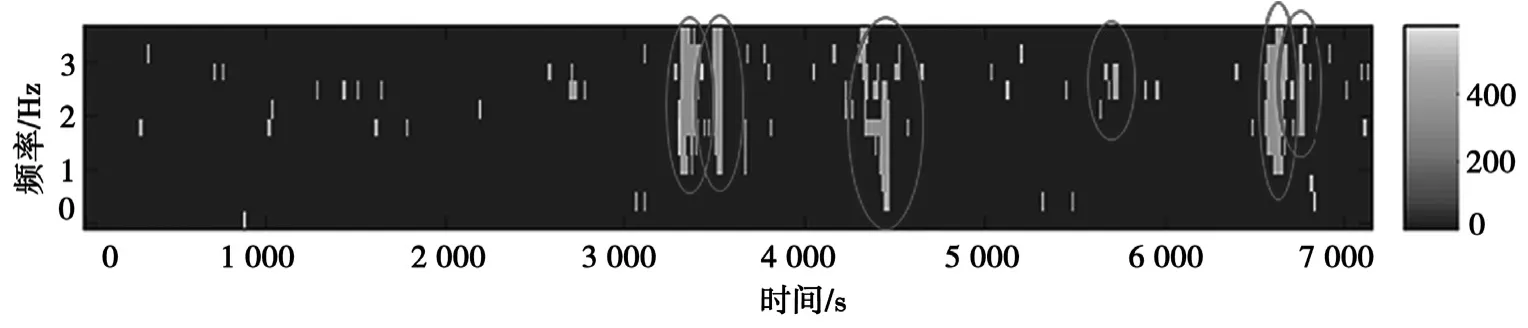
圖9 PMCC檢測水平速度分布結果圖
4 試驗驗證
通過外場試驗實時采集次聲信號,實時信號波形顯示界面如圖10所示。將多個次聲陣元的實時波形信息顯示在同一個屏幕上,橫軸為次聲波形顯示的時間戳,縱軸為次聲波顯示的幅度值,顯示的時間長度可以調整,可以調整為1~5 min的顯示時間寬度。軟件在右側顯示監測的事件方向和波達時間。
設備狀態分為網絡狀態和設備狀態兩個方面,采用指示燈的方式進行設備狀態及網絡狀態的判定。當狀態燈為紅色,說明為“故障”;當狀態燈為綠色,說明為“正常”。網絡狀態及設備狀態下圖10所示。
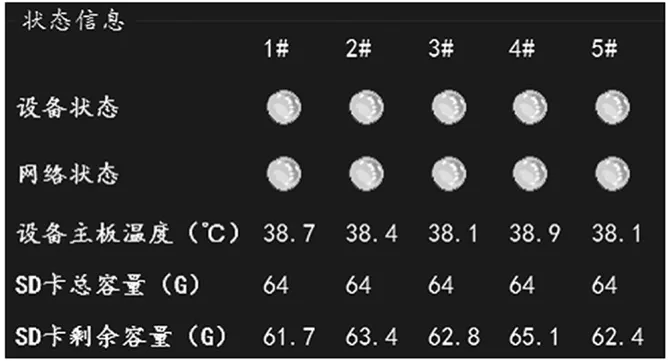
圖10 網絡狀態及設備狀態顯示圖
5 結 語
隨著次聲信號處理的應用越來越廣泛,相應的次聲信號處理軟件的設計意義重大。本文結合目前的次聲信號處理技術設計了次聲信號處理軟件,并通過軟件進行了實際的信號接收和處理,有效驗證了軟件的功能和性能。
猜你喜歡
今日農業(2021年10期)2021-07-28 06:28:12
小學生作文(低年級適用)(2019年5期)2019-07-26 00:45:10
信號處理(2018年5期)2018-08-20 06:16:02
信號處理(2018年5期)2018-08-20 06:16:00
信號處理(2018年8期)2018-07-25 12:25:42
信號處理(2018年8期)2018-07-25 12:24:56
勞動保護(2018年5期)2018-06-05 02:12:10
讀友·少年文學(清雅版)(2018年12期)2018-04-04 05:16:40
國際醫學放射學雜志(2016年4期)2016-08-22 10:56:54
辦公自動化(2016年18期)2016-08-20 12:50:24