基于無人船組合編隊的河口地區(qū)水下地形測繪技術及實踐
2022-08-25 02:16:50陳鼎豪孫玉超張小波
海洋技術學報 2022年4期
陳鼎豪,任 杰,孫玉超,張小波
(1.南方海洋科學與工程廣東省實驗室(珠海),廣東 珠海 519080;2.中山大學近岸海洋科學與技術研究中心,廣東 廣州 510275;3.國家海洋局南海規(guī)劃與環(huán)境研究院,廣東 廣州 510275)
對河口地區(qū)的水下地形測繪工作來說,其測繪效率和安全性目前都存在很大問題,其原因在于受徑流、潮汐、波浪等作用,河口地區(qū)的水下地形復雜,不僅有典型的潮流沖刷深槽、潮流沙脊等縱向地貌,還有不同尺度的水下沙丘、沙壩等橫向地貌[1],水深變化較大,傳統(tǒng)的測量船只適用于一部分深水區(qū)作業(yè),大量淺灘及潮間帶都需要乘坐橡皮艇和人工涉水等方式進行測繪,其測繪效率較低,且對測量人員來說存在一定安全風險。
隨著科技的發(fā)展,無人船的應用越來越廣泛,也為水下地形測繪提供了新思路,國內外使用無人船進行水下地形測繪的應用也越來越多[2-6],但其主要的應用范圍還在河道、湖泊等環(huán)境相對單一的水域,對于河口地區(qū)的應用仍然較少,少量的應用也僅僅停留在單船作業(yè)層面[7],仍然無法滿足在河口復雜水環(huán)境條件下對效率和安全的要求。本文提出了一種基于無人船組合編隊的河口地區(qū)水下地形測繪技術,通過采用大、中、小3種不同型號的無人船,搭載多波束和單波束測深系統(tǒng),針對河口地區(qū)進行集群同步測量,全面獲取河口區(qū)域的水下地形數(shù)據(jù),大大提高了作業(yè)的安全性和作業(yè)效率。
1 系統(tǒng)組成
無人船組合編隊測繪系統(tǒng)由無人船平臺子系統(tǒng)、測繪作業(yè)載荷子系統(tǒng)和數(shù)據(jù)處理與顯示系統(tǒng)3大部分組成。
1.1 無人船平臺子系統(tǒng)
無人船平臺子系統(tǒng)主要是為測繪作業(yè)載荷子系統(tǒng)提供安全穩(wěn)定的搭載平臺,保障測繪作業(yè)載荷子系統(tǒng)有穩(wěn)定的電源電壓和數(shù)據(jù)通訊,主要由大、中、小不同型號尺寸的無人船編隊組成(圖1),大、中型無人船搭載組合慣導(Position and Orientation System for Marine Vessels,POS MV)和多波束測深系統(tǒng),小型無人船搭載實時動態(tài)載波相位差分接收機(Real-Time Kinematic,RTK)和單波束測深系統(tǒng)。無人船平臺子系統(tǒng)具備路徑實時規(guī)劃、環(huán)境感知、目標識別、智能避障等功能,不同船型吃水深度、動力模式及搭載設備均有一定差異,可分別適用于河口地區(qū)不同的測量環(huán)境,各船型如圖2所示。
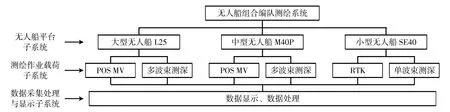
圖1 無人船組合編隊測繪系統(tǒng)組成示意圖

圖2 無人船平臺子系統(tǒng)組成
1.1.1 大型無人船
大型無人船(云洲L25C)參數(shù):船長7.5 m,總寬2.8 m,滿載吃水0.35 m,槽道間距1.00 m,設計排水量≤2.40 t,工作航速5~6 kn(靜水),最大航速10 kn(靜水),最大載荷總量200 kg,續(xù)航能力≥300 km(靜水條件工作航速),通訊距離10 km,遙控距離大于500 m,工作海況Ⅱ級,生存海況Ⅳ級。
大型無人船動力采用船尾外掛柴油掛機驅動,動力較強,能適用于水動力較強的深水環(huán)境測量。
1.1.2 中型無人船
中型無人船(云洲M40P)參數(shù):船長4.67 m,總寬2.1 m,滿載吃水0.32 m,槽道間距0.7 m,工作航速4~6 kn(靜水),最大航速8 kn(靜水),最大載荷總量80 kg,續(xù)航能力8 h(靜水條件工作航速),通訊距離10 km,遙控距離大于500 m,工作海況Ⅱ級,生存海況Ⅳ級。
中型無人船采用純電推進,內燃機發(fā)電增程的方式,續(xù)航時間長,能適用于水動力較弱的深水環(huán)境測量。
1.1.3 小型無人船
小型無人船(云洲SE40)參數(shù):船長1.05 m,總寬0.55 m,滿載吃水0.15 m,最大載荷總量8 kg,續(xù)航能力8 h(1 m/s),通訊距離2 km,遙控距離在1 km內,抗風浪等級3級風0.5 m浪。
小型無人船采用1個碳纖維+金屬噴泵噴水推進動力,船體小、重量輕,能適用于水動力弱的淺水潮間帶或淺灘水域測量。
1.2 船載作業(yè)子系統(tǒng)
船載作業(yè)子系統(tǒng)在無人船組合編隊測繪系統(tǒng)中主要功能為采集地形數(shù)據(jù),主要包括單波束、多波束、表面聲速儀、聲速剖面儀、姿態(tài)儀、導航和定位等設備。
大、中型無人船均搭載組合慣導(Applanix POS MV)和多波束測深系統(tǒng)(海卓MS8200),并配備表面聲速儀和聲速剖面儀,多波束提供水深探測數(shù)據(jù),組合慣導為測量提供精確的定姿和定位信息,表面聲速儀和聲速剖面儀為多波束提供水體聲速數(shù)據(jù)。小型無人船搭載RTK和單波束測深系統(tǒng),單波束提供水深探測數(shù)據(jù),RTK提供導航定位信息。
1.3 數(shù)據(jù)采集處理與顯示子系統(tǒng)
數(shù)據(jù)采集處理與顯示子系統(tǒng)主要功能為處理船載作業(yè)子系統(tǒng)所測量的地形數(shù)據(jù),包括實時處理和后期處理,還支持現(xiàn)場測繪數(shù)據(jù)實時顯示。在無人船編隊數(shù)據(jù)采集處理與顯示子系統(tǒng)中針對單波束和多波束測深數(shù)據(jù)的獲取、處理、展示主要分為兩部分:一部分針對單波束,由于單波束測深數(shù)據(jù)量較小,數(shù)據(jù)可通過通信基站實時傳輸回船控電腦,數(shù)據(jù)的處理、展示也集成于船控軟件中;另一部分針對多波束測深數(shù)據(jù),多波束在測量過程中產生數(shù)據(jù)量較大,數(shù)據(jù)測量后儲存于船體主控電腦中,測量結束后采用多波束后處理軟件Qimera進行后處理,多波束數(shù)據(jù)顯示可通過岸基電腦遠程登錄無人船主控電腦實現(xiàn)。
2 無人船編隊測繪系統(tǒng)優(yōu)勢
無人船編隊測繪方式和傳統(tǒng)的有人操控船舶測量及單一無人船測量方式相比,其安全性、效率性、適用性、容錯性、經濟性都具有較大優(yōu)勢,具體表現(xiàn)如下。
2.1 無人船編隊可同時獲取潮間帶、淺灘和深水區(qū)數(shù)據(jù)
在傳統(tǒng)的水下地形測繪作業(yè)中,河口地區(qū)深水區(qū)一般采用單波束或多波束測深系統(tǒng)進行測量,需要采用有人操控的船舶作為平臺,受限于船體體積大、吃水深,淺水區(qū)域無法測量。對于淺灘區(qū)域通常采用攜帶RTK、測深桿或測深錘等方法,結合橡皮艇、竹筏等運載工具或工作人員涉水進行測量,作業(yè)勞動強度大、工作效率低、安全隱患大[6]。在實際作業(yè)過程中需要按照深水、淺水和潮間帶分別采用上述不同方式進行測繪,如需同時測量不同水深地形,則投入人力數(shù)量巨大。
對無人船組合編隊測量方式來說,通過其集群控制功能,在船體下水后1人便可控制整個船隊進行工作。小型無人船可專門用于測量潮間帶和淺灘區(qū)域,小船吃水淺(大于等于0.15 m),可通過潮汐變化規(guī)律合理布置測線,自動控制測量船隨潮汐變化始終處于測量工作狀態(tài)。中、大型無人船則可依照航線按計劃進行深水區(qū)測繪,從而保證對潮間帶、淺灘和深水水域進行同步作業(yè),這樣在人員配備和工作效率上都遠遠優(yōu)于傳統(tǒng)測量方法。
2.2 不同型號無人船組合編隊可適用于多種水動力環(huán)境
河口區(qū)域受徑流、潮汐、波浪作用,水動力結構復雜,漲落急時流速較大,如珠江河口落急最大平均流速約在1.2 m/s[8],此時電機驅動的無人船容易出現(xiàn)功率過載而導致停機的現(xiàn)象。在河口攔門沙外無島嶼庇護直面外海,受波浪作用的影響強烈,小型無人船航行安全無法保障。因此在單一型號無人船測繪過程中,受船體平臺自身生存能力和動力所限,其水域環(huán)境適用性較差。電機驅動的無人船無法適用于急流水域,小型無人船生存能力較差不適用于高海況海域,大型無人船能適應高海況環(huán)境但由于吃水較深無法測量淺水區(qū)域。
無人船組合編隊可根據(jù)河口水動力和地形結構合理分配對應船型,使之能更好地適應河口近岸復雜的地形和水動力環(huán)境,提高測繪效率。
2.3 無人船編隊船體操控和數(shù)據(jù)采集模塊高度集成
在傳統(tǒng)有人船測繪過程中,設備操控和船體操控需要不同的作業(yè)人員負責。在設備校準和測繪作業(yè)中,航線布置規(guī)劃需設備操作人員與船體操作人員時刻保持溝通,這中間存在一定的信息傳遞時間,不利于整體把控。而無人船組合編隊集群控制軟件集成了船控系統(tǒng)和數(shù)據(jù)采集系統(tǒng),在船控方面,可提前設置航線,船隊可按照預設航線自動航行,船體配有避障雷達,遇到障礙物可進行自動避障;在數(shù)據(jù)采集方面,無人船的單波速數(shù)據(jù)可通過通訊模塊實時傳回岸基電腦,岸端軟件可實時成圖并進行數(shù)據(jù)處理。上述所有操作均可單人完成,其船體的操控和數(shù)據(jù)采集處理也可在同一軟件進行,大幅減少了測繪作業(yè)過程中的工作量。
3 河口地區(qū)水下地形測量實施
2021年11月,利用該觀測技術對位于廣東省珠海市磨刀門河口地區(qū)進行了實地測量。此次測量配置小船2條、中船1條、大船1條。測繪前首先對測繪區(qū)域從水動力和水下地貌進行分區(qū),主要分為淺灘區(qū)域、強水動力深水區(qū)、弱水動力深水區(qū)3個區(qū)域,根據(jù)區(qū)域劃分匹配不同測量船型進行測繪。本次測量的坐標參考系為國家2000大地坐標系,1985國家高程基準,投影方式為高斯—克呂格3°帶投影。
3.1 測量地區(qū)地形特征
磨刀門河口為西江徑流的主要出海口門,口門區(qū)潮流活動強烈,是典型的河流作用為主的河口。受人類活動的作用,磨刀門河口演變已進入后門時期,口門直面開暢海洋,攔門沙在沒有島嶼屏蔽的環(huán)境中,直接經受波浪作用。目前磨刀門攔門沙劃分為3個部分,東、西汊之間的攔門沙中心,東汊東部的攔門沙東區(qū),西汊西部的攔門沙西區(qū)[9]。
整體來看磨刀門攔門沙以內除航道外,以淺灘地形為主,攔門沙內水動力結構較為單一,以徑流和潮流作用為主。攔門沙以外水深增加,潮流、波浪作用增強。
3.2 無人船編隊布置
無人船編隊配置大、中、小3種型號測量無人船,小型無人船適合測量海況較好的淺灘區(qū)域,中型無人船適合海況較好的深水區(qū),大型無人船適合海況較差的深水區(qū)。根據(jù)不同型號無人船的適用范圍,結合磨刀門水域地形和水動力特征,小型無人船測量磨刀門河口淺灘區(qū)域,中型無人船測量攔門沙以內航道深水區(qū)(大于5 m),型無人船測量攔門沙以外水動力較強的深水區(qū),具體分布見圖3。
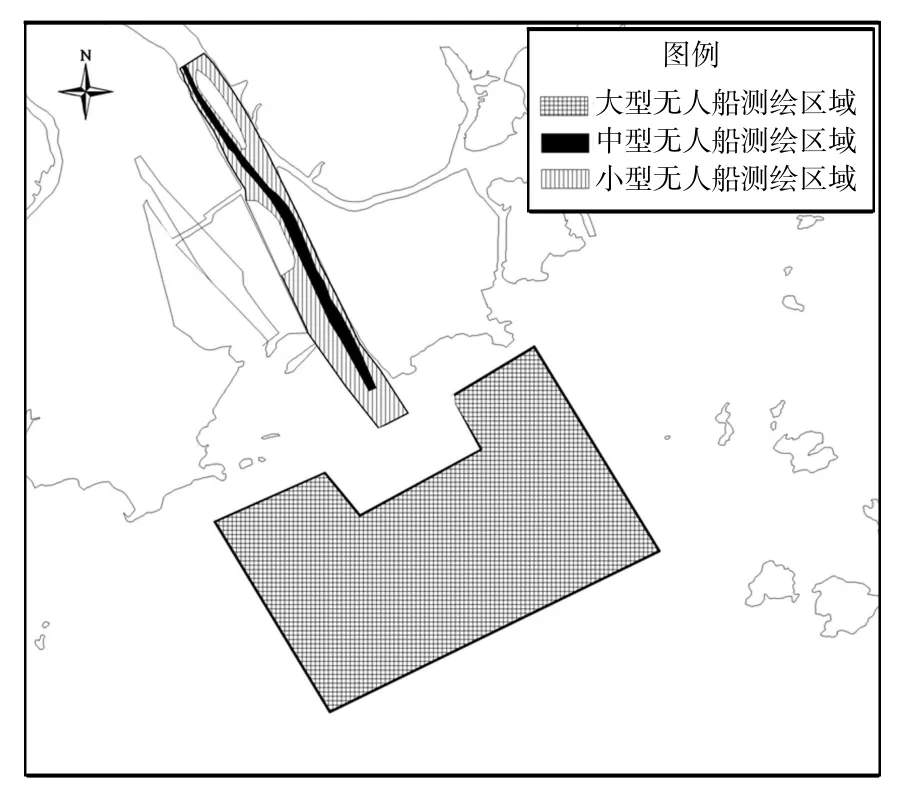
圖3 磨刀門河口無人船分配作業(yè)區(qū)域
3.3 無人船編隊作業(yè)
通過無人船基站軟件航線布置功能,依據(jù)不同船型選擇對應的測繪區(qū)域進行航線布置。小型無人船搭載RTK和單波束測量淺灘區(qū)域。在布設航線之前需根據(jù)潮汐變化規(guī)律進行布設,確保小型無人船處于合適的水深條件中,不會因為落潮時退水造成無人船擱淺而影響測量任務。單波束數(shù)據(jù)通過船控軟件內置數(shù)據(jù)處理功能進行處理。大、中無人船搭載POS MV、海卓MS8200多波束,根據(jù)實際測量要求布設航線測量水深。作業(yè)時需進行同步驗潮,此次選用測量海域附近已有驗潮站數(shù)據(jù)進行水深測量時的水位改正。
3.4 測量數(shù)據(jù)處理
3.4.1 單波束數(shù)據(jù)處理步驟
單波束數(shù)據(jù)采用Hydro Survey軟件進行處理,主要處理步驟如下。
(1)水深采集取樣處理:剔除有問題的原始測量水深值。
(2)潮汐改正:導入驗潮站數(shù)據(jù)進行水深數(shù)據(jù)改正。
(3)綜合改正:包括測深儀改正、動態(tài)吃水改正、坐標系統(tǒng)誤差改正、水深系統(tǒng)誤差改正。
3.4.2 多波束數(shù)據(jù)處理步驟
多波束數(shù)據(jù)采用Qimera軟件進行處理,處理步驟如下。
(1)參數(shù)校正:由于多波束安裝誤差、環(huán)境影響等客觀原因的存在,多波束換能器安裝不可能完全水平,從而導致?lián)Q能器與水平面存在夾角[10]。通過校準側線計算出縱搖偏差、橫搖偏差、艏向偏差,輸入軟件中以校正安裝偏差。
(2)聲速改正:導入作業(yè)時使用聲速剖面儀測量的聲速剖面數(shù)據(jù),校正聲速誤差。
(3)潮汐改正:根據(jù)GB 12327—1998《海道測量規(guī)范》要求,水深小于200 m的測深資料需進行潮汐改正[11]。本次測量采用三灶實測潮位數(shù)據(jù)進行潮位改正。
(4)水深編輯:通過Qimera軟件的線編輯、面編輯、3D編輯功能對測區(qū)進行線、面和三維視角的人工辨別誤差剔除。
3.4.3 精度評價
根據(jù)GB 12327—1998《海道測量規(guī)范》的要求,計算重復測點上的水深測量值的差值,即主檢不符值,作為水深測量準確度綜合評估的依據(jù),計算公式如下。

式中,σ為中誤差,單位為m;hi為不同測線條幅重復測點水深測量值的差值;n為重復測點組數(shù),兩個重復測點為一組。
對多波束數(shù)據(jù)來說,通過提取分辨率為2 m×2 m的網格大小求取均值來代表重復測點,經計算多波束測量數(shù)據(jù)重復點差值的中誤差范圍在0.10~0.20 m,平均中誤差為0.15 m。對單波束數(shù)據(jù),提取5%檢查測線進行誤差分析,經計算平均中誤差為0.3 m。航道水域由小型無人船單波速和中型無人船多波束同時測量,在實際測量過程中受聲線彎曲的影響,多波束測深的邊緣波速數(shù)據(jù)質量較低,而單波束測深受聲線彎曲的影響較小[11],這其中存在單波束與多波束數(shù)據(jù)融合處理問題,為了評估二者數(shù)據(jù)質量的一致性,在重疊區(qū)域多波束按照2 m×2 m的網格大小求取均值與單波束數(shù)據(jù)進行比對,經計算二者重復測點差值的平均中誤差為0.23 m,這表明在后處理過程中通過聲速改正和剔除邊緣波速,多波束數(shù)據(jù)能與單波束保持較好的一致性。綜上,小型無人船單波束和中、大型無人船多波束測量數(shù)據(jù)滿足GB 12327—1998《海道測量規(guī)范》主檢不符限差0.5 m(水深0~20 m)的要求。
3.5 成果可視化
本次測量獲取了磨刀門河口水下地形點云數(shù)據(jù),成果見圖4。
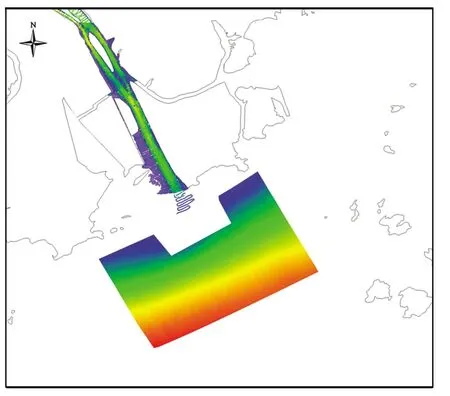
圖4 磨刀門河口水下地形點云數(shù)據(jù)
4 無人船組合編隊與傳統(tǒng)測繪的對比分析
經過本次磨刀門河口地區(qū)的現(xiàn)場實測,無人船組合編隊的測繪模式在數(shù)據(jù)測量精度方面能滿足相關的測繪規(guī)范要求,與傳統(tǒng)測繪方式并無明顯差異。在工作效率方面,此次現(xiàn)場測繪時間總計7天,其中2條小船工作6天,中船工作3天,大船工作7天,在同等工作量的情況下,傳統(tǒng)人工單船作業(yè)需22天左右,如考慮淺灘測繪過程中人工涉水作業(yè)則需更多時間。如采用傳統(tǒng)人工多船作業(yè)方式,雖然能縮短測繪時間,但需要的人員數(shù)量約是無人船隊的4倍,其中還存在人員作業(yè)風險。如采用傳統(tǒng)的單一型號無人船測繪,則因其無法完全滿足磨刀門河口復雜的地形環(huán)境,只能在適用范圍內進行作業(yè),適用范圍外則需通過其他途徑補測。
無人船組合編隊在實際測繪過程中雖然較傳統(tǒng)有人船和單一型號無人船測繪有一定優(yōu)勢,但在實際使用過程中也存在一些新的問題,比如:①河口近岸航道繁忙,船只通行較為頻繁,無人船雖有主動避障功能,但實際操作過程中存在船只避障策略失誤等情況,仍需人工干預。②受通訊距離影響(開闊海域最大通訊距離10 km),單一控制基站無法滿足大范圍測繪,要大范圍同時測繪需建立多個岸端基站滿足不同區(qū)域通信要求。③在無人船編隊中,小型無人船可通過人工布放回收,但大、中型無人船需要吊機進行操作,岸邊布放需尋找合適的布放場地,如在水域中進行布放則需要大型船只提供平臺保障。
綜上,通過現(xiàn)場實測,無人船組合編隊測繪技術在效率上較傳統(tǒng)方法有著較大的優(yōu)勢,雖存在一些傳統(tǒng)測繪方法不存在的問題,但與其優(yōu)勢相比所存在的問題在可接受范圍之內,且隨著技術的發(fā)展,部分問題也會得到解決。
5 結 論
本文探究了基于無人船組合編隊的河口地區(qū)水下地形測繪技術,通過配置不同規(guī)格無人船以適應河口地區(qū)復雜的地形和水動力環(huán)境,使之能在河口地區(qū)同時對潮間帶、淺灘和強、弱水動力環(huán)境下的深水區(qū)進行水下地形測繪,較傳統(tǒng)有人船測量和單一型號無人船測量都大大提高了測繪效率。此次無人船組合編隊在磨刀門河口的成功應用,表明該測繪技術可在復雜環(huán)境的河口地區(qū)水下測繪工作中推廣應用,為河口地區(qū)工程建設和數(shù)值模擬提供數(shù)據(jù)支撐。
通過本次現(xiàn)場實測驗證,大、中、小無人船最大工作海況分別在2級、3級、3級,中、小船在河口作業(yè)過程中頂流作業(yè)需在流速小于1 m/s的條件下進行,流速過大可能引起電機過載而導致停機。上述實際工作海況和水動力條件能滿足河口地區(qū)大部分水動力環(huán)境,其在推廣應用上有很大的想象空間,如在島礁地形測繪方面,小型無人船可穿梭于礁石之間進行測繪,礁石外圍可通過大、中型無人船進行掃測。在海洋綜合調查方面,無人船編隊的觀測模式可通過加裝電動絞車、聲學多普勒剖面流速儀(Acoustic Doppler Current Profiler,ADCP)、溫鹽深分析儀、小型氣象站、側掃等設備,再配合多波束可進行大范圍的海洋水文、氣象和地質地球物理等相關方面的海洋調查,其經濟性和調查效率都遠遠高于傳統(tǒng)的海洋調查模式。
整體來看,無人船組合編隊測繪模式作為一種新型的觀測技術,雖然在應用過程中存在些許不足,但隨著技術的不斷發(fā)展和完善,其應用領域不僅僅限于水下地形測繪領域,還可推廣至水文、大氣和環(huán)境監(jiān)測等方向,具有良好的市場前景和發(fā)展趨勢。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導向(2019年10期)2019-08-24 06:25:28
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21