地下金屬礦無人駕駛電機車多目標調度優化與應用
2022-08-25 10:35:38王洛鋒徐青松李學現顧清華
中國鉬業 2022年4期
王洛鋒, 徐青松,李學現,顧清華
(1.洛陽欒川鉬業集團股份有限公司,河南 洛陽 471000)(2.西安建筑科技大學資源工程學院,陜西 西安 710055)(3.西安市智慧工業感知計算與決策重點實驗室,陜西 西安 710055)
0 引 言
地下礦的運輸調度是整個生產過程的關鍵環節,但關于地下礦電機車運輸調度問題卻缺乏深入的理論研究。當前,無人駕駛技術的飛速發展為解決地下礦生產運輸提供了新的思路,也為建設智慧礦山提供了技術支撐。一方面可以減少關鍵生產環節的人工成本,減少由人為因素導致的安全生產事故,降低運維成本;另一方面,可實現生產環節之間的高效協同,提高生產安全性與運輸效率。
有許多學者針對地下礦無人駕駛技術的應用進行了研究。2004年,德國基于井下無線通信系統實現了無人駕駛電機車數據的傳輸[1]。2011年中國恩菲工程技術有限公司建造的第一臺無人駕駛變頻電機車在湖南湘潭牽引機車廠下線[2],在冬瓜山銅礦項目經過多年的實際應用研究,該技術大幅降低了項目的生產成本[3]。最初的電機車無人駕駛技術應用,一般都是通過鋪設傳感器感知無人駕駛電機車行駛狀態,進而設計運行指令實現電機車運行控制,其中無線通訊技術得到了研究學者的重視[4-5]。2017年,李竹年對劉莊煤礦項目的電機車運輸系統進行了無人化改造,提出了自動駕駛模式以減少人工調度的干預[6]。伴隨著井下定位技術與5G通信技術的發展,無人駕駛電機車的運行逐漸從階段性調度指令轉化為實時調度。武學宏[7]設計了一種基于無線局域網的礦井機車無人駕駛系統,提升了無人駕駛電機車的運輸效率。李宏文等提出使用5G通信技術構建網絡信息實時傳輸系統,綜合考慮井下環境因素來實現實時調度[8-9]。電機車無人駕駛技術逐漸將傳統的人工調度方式轉換為遠程作業的形式,為實現智慧礦山建設奠定了基礎。
目前,關于地下礦電機車的相關研究大多集中在運行定位、檢測以及問題預警等方向,針對電機車運輸調度的研究較少。代表性研究主要有:孫瑩等[10]考慮了軌道運輸的限制,建立了運輸成本最小的電機車調度優化模型。謝新穎[11]為了提升電機車的運輸效率,構建了優化機車平均速度的運輸模型,將速度通過運輸距離與通行時間進行表述。龍智卓等[12]將礦井的地圖轉化網格節點建立起柵格模型,優化礦車行駛的全局路徑。徐艷麗[13]對縮短運輸時間和減少機車擁堵進行研究,但是主要優化思想借鑒生產調度將電機車運行過程劃分為不同的工序進行組合。譚期仁等[14]對電機車的行駛距離與行駛路線進行綜合分析,以單個班次內的運輸量為研究對象,建立了總運量與總運輸距離的多目標優化模型。以上研究表明,電機車運輸優化調度需要考慮多種因素的影響,而多目標模型的相關研究還不夠豐富,尤其當傳統有人駕駛逐漸被無人駕駛替代之后,無人駕駛電機車調度理論值得進一步研究。
另外,在倉儲物流等領域所用到的穿梭車(Rail Guide Vehicle,RGV)具備較為成熟的有軌調度運輸理論,這為地下電機車的調度研究提供了借鑒。例如,在有軌穿梭車的相關研究中,有學者考慮路徑最短[15]、運輸成本最低[16]、運行時間最短[17]等為優化目標,建立了不同的調度優化模型。馬昌譜等[18]將整個貨物搬運考慮到模型構建中,構建了系統性避障的最小化運行時間的優化模型。王天浩等[19]對RGV在環形軌道運作環境下的碰撞情況進行分析,以貨物總入庫時間最小化為目標,構建了環形2-RGV系統入庫調度問題的混合整數規劃模型。Wang等[20]分析了可能發生故障的調度狀態,建立了以最大加工材料數和機床最短空閑時間的動態調度雙目標模型。由上述研究可知,有軌運輸調度相關行業內已經有較為完善的研究體系,通過借鑒這些相對成熟的研究成果可以幫助解決地下金屬礦無人駕駛電機車調度優化的不足。
通過對上述文獻的分析可以發現:(1)由于受到很多現實條件的限制,目前關于地下金屬礦電機車運輸調度問題的研究很少選用多目標優化策略,缺乏進一步的深入分析;(2)無人駕駛電機車的優化問題一般以仿真系統進行組合優化,獲得優化結果不能直接得出可行的參考方案。因此,本文以地下金屬礦無人駕駛電機車調度系統為研究對象,考慮井下復雜的運輸環境和無人駕駛電機車調度問題的特點,建立了地下金屬礦無人駕駛電機車多目標調度模型,并基于NSGA-Ⅱ設計了一種多目標求解算法,最后利用實際生產數據驗證了模型和求解算法的可行性。
1 問題描述和優化調度數學模型
1.1 問題分析
無人駕駛電機車調度優化的主要思路就是在已知一定任務量的情況下,合理安排每臺電機車的運輸路線,首先要確保任務的順利完成,其次要考慮運輸軌道的限制,避免無人駕駛電機車在行駛過程中出現碰撞,最后要兼顧到采場溜井的產量限制以及金屬礦在實際生產中對礦石品位的要求。地下金屬礦中段運輸系統復雜,軌道鋪設為環形單行軌道,在軌道通行限制方面可以將采場溜井、主溜井以及岔道口作為判斷的依據,在圖1中給出了實際生產項目的電機車運行軌道的布局。每臺無人駕駛電機車在出發的時候均會被設定出發時間,根據調度路線可以計算得出電機車到達采場溜井、岔道口以及主溜井的時間,得出這些到達時間后需要對到達時間進行判斷以及動態調整。例如一號電機車從主溜井空車運行到采場溜井,二號電機車從某個采場溜井滿載礦石至主溜井卸礦,這時候會出現運輸區段占用情況沖突,需要對一號電機車的的行駛時間進行動態調整,等到二號電機車順利通過這一區段后才能繼續運行。采場溜井的產量限制在優化過程中對應的是考慮到電機車不能一直重復訪問同一個采場溜井,雖然距離近的采場溜井具有較小的運輸成本,但是超過采場溜井的開采上限時就不能再訪問這一開采點。金屬礦的品位控制一直遵循著“以高填低”的準則,當地下礦為金屬礦時,這一重要的約束需要被考慮在內,采場溜井的開采量與出產礦石的品位也是影響電機車調度的重要因素。
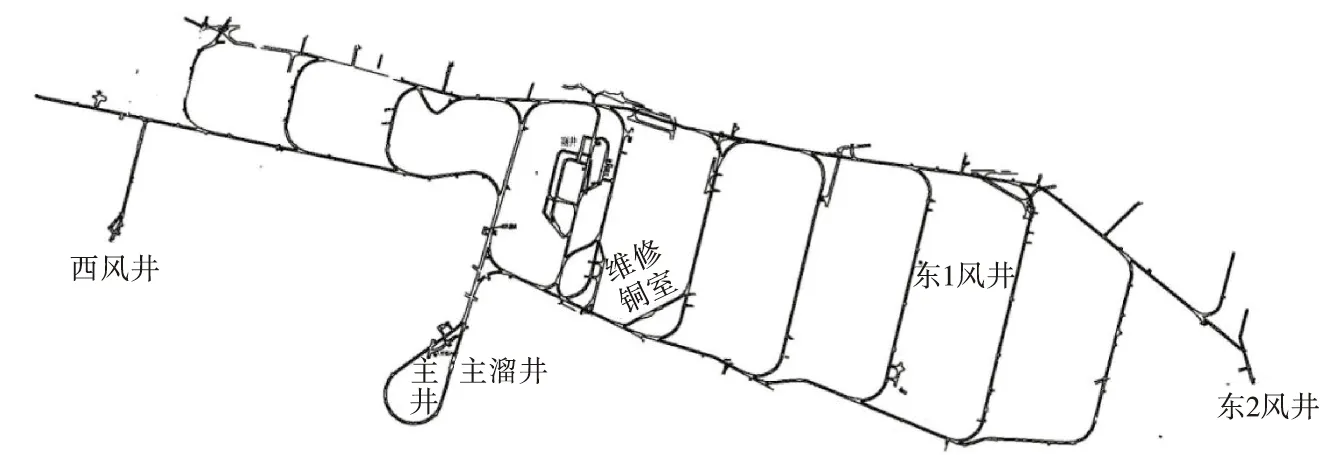
圖1 實際生產項目的電機車運行軌道布局圖
1.2 模型假設及參數說明
為了有效描述電機車調度系統,使模型更符合實際生產,因此做相關假設:
(1)假設無人駕駛電機車在行駛過程中,所有重載電機車速度一致,空載電機車速度一致。
(2)每臺無人駕駛電機車的載重不會出現超載的情況。
(3)無人駕駛電機車在運行過程中只能按照規劃好的調度路線行駛,并且無人電機車無倒車返回的情況。
(4)不考慮無人駕駛電機車在行駛過程中可能發生故障的情況。
(5)無人駕駛電機車裝載與卸載礦石的時間根據實際數據來確定。
(6)所有的無人駕駛電機車開始作業時都是從車場出發,在運輸作業完成后返回主溜井。
(7)每臺無人駕駛電機車一次運輸作業只能去往一個采場溜井,即使未滿載也要回到主溜井,不允許去往其它采場溜井。
(8)同一個采場溜井在一定時間內只能為一臺電機車開展裝載作業,只有在前方的電機車裝載作業完成駛離后下一臺電機車才能開始裝載作業,不會出現搶占作業的狀況。
為使模型更加清晰明確,表1給出了模型中所使用的各變量及參數說明。

表1 變量及參數說明

續表1
1.3 無人駕駛電機車調度優化模型的構建
根據實際生產需求,為了節省輸運過程中的成本以及提高礦石運輸效率,本文構建了在完成一定任務量的前提下,所需總運輸成本最小,等待時間最小多目標優化模型,構建的多目標模型如下:
F=Min(f1,f2)
(1)
(1)最小化運輸成本
(2)
在本模型中,無人駕駛電機車在主溜井到采場溜井再返回主溜井過程往返一次的成本包括了固定成本和變動成本,總運輸成本的計算分為空載運輸成本和重載運輸成本兩部分,等于無人駕駛電機車往返一次的成本乘以往返次數。
(2)最小化等待時間

(3)
在本模型中,等待時間根據電機車完成運輸任務的總耗時以及電機車在軌運行的實際時間來確定,當電機車開始運行時,只會在岔道口以及采場溜井附近需要進行避障任務時才會在避障處進行等待,因此用總運輸時間減去在軌道的實際行駛時間即可得到等待時間。
模型約束條件:
考慮到無人駕駛電機車的載重限制,從主溜井出發到返回主溜井卸載礦石過程中,電機車載重不超過電機車最大載重Bt:
(4)
為保證每個采礦場的礦石產量能有效利用,需要保證每個采場溜井的運輸量在產量范圍內:
(5)
無人駕駛電機車必須在固定軌道上運行,為了保證在行駛過程中不會出現電機車碰撞事故,因此必須考慮電機車在共用軌道上在一定時間段內不能出現雙向行駛的電機車。為了更清楚的表達這個順序關系引入了輔助變量Tjk1表示無人駕駛電機車從主溜井空車前往采場溜井到達共用軌道j的時間,Tjk2表示無人駕駛電機車從采場溜井重車前往主溜井到達共用軌道j的時間,軌道j的長度為dj:
(6)
無人駕駛電機車在同一區段軌道j上同向運行時,需要保證相互之間保持設定的安全距離,也就是在一定時間段內僅能有一輛無人駕駛電機車在運行,為了清楚的表達這個關系引入了輔助變量Nsjk,表示如果在區段j上無人駕駛電機車k不是最后一次作業任務,下一臺電機車進入這一區段的時間:
Nsjk-Tejk≥Ta
(7)
為了保證電機車在到達每個溜井都完成裝載任務,所以無人駕駛電機車空車運行的次數和重車運行的次數應該保持一致:
(8)
金屬礦山對礦石的品位有規定的要求,因此在運輸過程中設計品位約束能有效保證得到的礦石可以直接進行下一步加工:
(9)
其中gi是采場溜井i產出礦石的平均品位,G為規定的礦石品位要求,α為可以接受的誤差。
所有的運輸任務應該完成最小的生產目標量Q:
(10)
2 算法設計與模型求解
在以往的研究中,由于考慮的大多為成本等單目標優化問題,在模型求解上采用的方法有線性規劃、整數規劃以及算法求解等。但是針對多目標優化問題而言,如果簡單的通過分配權重的方法將多目標轉化為單目標,一方面,難以使用科學的方法進行權重分配;另一方面,構建的多目標之間存在沖突性,分配權重后會使得尋優過程向同一方向進行,使得其中某些優化目標不能有效體現。因此,本文提出一種多目標優化算法求解多目標模型。
2.1 算法設計
原始的NSGA-Ⅱ算法能有效解決無約束的多目標優化問題,但是由于存在多個約束條件,需要算法具有較強的多樣性尋找解空間的可行解。在原始NSGA-Ⅱ算法中關于多樣性的維護存在不足,約束空間可能導致擁擠度距離的計算存在較大差距,隨著目標函數的增多,算法的這一不足會更加明顯。算法收斂性在于Pareto支配關系來區分收斂性的好壞,并且將收斂性好的個體優先加入歸檔集。但是根據Pareto支配關系的定義可以看出,必須滿足在每個目標維度上的目標函數均滿足要求才可完成層級劃分,由于約束條件的存在導致可行域內的解無法有效得到非支配層級。為了克服復雜可行域會造成解的非支配層級難以確定的難題,保證算法在迭代過程維持解的多樣性,使用距離優勢關系[21]對原始NSGA-Ⅱ算法進行改進。使用距離優勢關系代替原始的Pareto支配關系,改進后算法的框架與NSGA-Ⅱ算法框架一致,在圖2中給出了改進后NSGA-Ⅱ-DDR算法的求解多目標優化模型的流程圖。
2.2 算法編碼
為提升算法求解效率,在種群初始化過程中不僅僅依賴隨機生成的種群,而且在初始化設計中加入了相關的約束條件。以每個采場溜井的運輸量限制約束與最小礦石產出量為例,染色體在隨機生成后通過解碼計算是否滿足這兩個約束條件,如果滿足約束則參與種群迭代,如果不滿足約束條件就進行修正,直至初始種群中的所有解均滿足約束條件的要求。
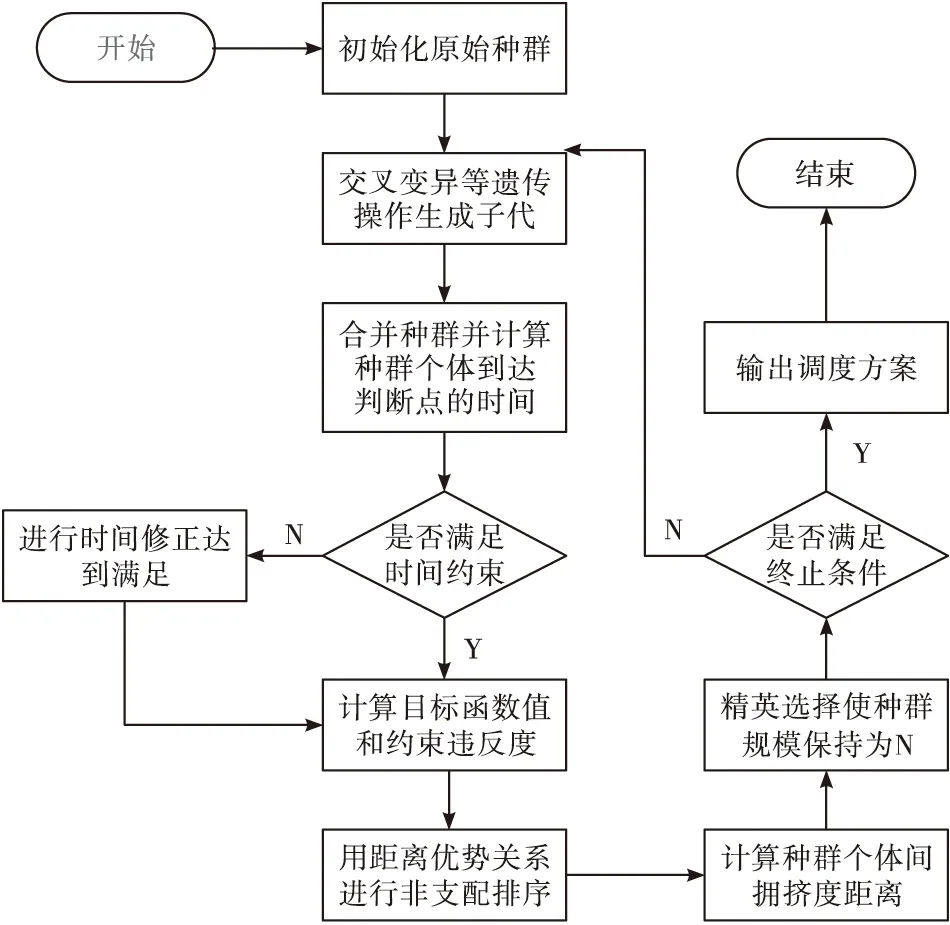
圖2 NSGA-Ⅱ-DDR算法求解多目標優化模型流程圖
為了將模型中的各項決策變量與算法結合起來,需要設計染色體來代替模型中的決策變量。在模型中需要計算無人駕駛電機車重載、空載的次數、還需要計算電機車的出發及到達時間。而在實際生產過程中,電機車運行的是一條完整的線路,在完成卸載任務后需要判斷繼續行駛到下一個采場溜井。因此,在染色體設計結合實際,直接采用整數編碼的方式將染色體與電機車行駛路徑對應。為了形象具體描述編解碼方式,給出簡單的例子繼續說明,假設某地下礦的采場溜井個數為9,生成的染色體表現形式見圖3。

圖3 染色體示意圖
由于無人駕駛電機車在行駛過程中路線比較固定,并且一般只會在主溜井完成卸載作業,因此在生成決策變量時僅需要考慮電機車需要到達的采場溜井,每個數字的表示對應采場溜井的編號。圖3形成的染色體對應的實際運行路線就是無人駕駛電機車從主溜井出發牽引空車行駛至溜井6,裝載作業完成后返回主溜井卸礦,在主溜井卸礦完成后行駛至溜井8,直至完成本次的運輸作業。在算法生成染色體時只用生成簡單的線路圖進行編解碼后就能知道電機車到達每個溜井的次數,也就是模型所對應的x與y值。
為求解無人駕駛電機車多目標調度優化模型,需要考慮模型中的產量約束,最低產量要求的設置用于染色體長度的確定。以最低產量要求為參考,將最低產量進行一定比率放大后,然后根據電機車每次牽引重車的載礦量來確定電機車需要運行的次數,該次數則對應著編碼中染色體的長度。
為了將編碼的染色體進行算法迭代,在圖4給出了算法的遺傳操作示意圖,圖4(a)中存在點位的編號為0,這說明了該點的實際采場溜井并不存在,只是為了構建相同的染色體長度。交叉操作時采用單點交叉的方式進行,圖4(a)中兩條染色體的三號位發生了交叉操作,同時在點位的選取過程中設置了通行閾值,避免電機車一直到訪同一個位置。圖4(b)是單條染色體發生單點變異的示意圖,染色體在六號點位發生了隨機變異。圖4(c)是染色體發生兩點變異的示意圖,染色體在二號點位和六號點位發生了變異,具體變現在小點位之前的染色體片段與大點位之后的染色體片段位置互換,變異操作是為了避免陷入局部最優,增加新的運行路線。
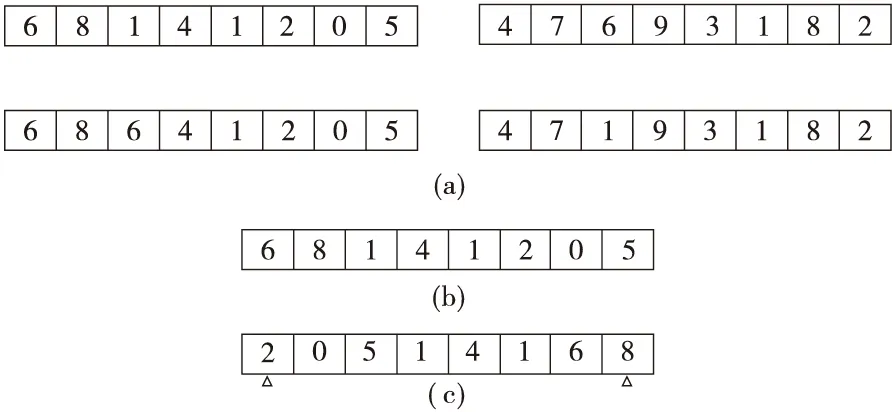
圖4 染色體遺傳操作示意圖
在多目標優化模型的構建中考慮了相關的約束條件,在算法的迭代更新中需要將約束條件以合適的方式加入算法優化中,一般的處理方法包括約束空間外解直接舍去、算子修正與引入懲罰函數等[22]。本文對約束的處理選擇用算子修正以及設置懲罰函數的方式,由于時間約束的存在使得電機車在運行過程中必須按照規定的線路行駛,所以時間約束要通過對電機車的運行時間進行修正,確保在可能會發生沖突的地點運行通暢。懲罰函數的引入是為了保證略微超出約束邊界的解能加入算法迭代,因此對于時間約束外的所有約束條件都是用懲罰函數的方式加入算法迭代過程。
3 實際應用
為驗證上文中所提出的無人駕駛電機車調度優化模型及求解算法的可行性,選取了某地下金屬礦的實際生產項目作為優化案例分析,通過試驗分析對模型與求解算法進行有效性檢驗。
3.1 項目概況
某地下金屬礦位于山東省,出產的鐵礦石是某鋼鐵集團重要的原材料來源。該地下鐵礦是國內最早開采的大型地下礦之一,目前共開發出3個大型礦區,分別是中央采區、西北采區和東南釆區,礦區及周邊地區均為沖積平原地貌,地勢平緩。項目的《詳勘報告》表明礦區內的鐵礦儲量在4 500~5 000萬t之間,礦區內礦石分布呈現急傾斜礦體,根據專家建議確定開采方式為充填采礦法。根據礦體賦存條件,初步設計將礦體一期開采劃分為-120 m、-220 m和-320 m 3個中段,其中-320 m水平為運輸中段,-120 m水平為回風中段,-220 m水平為輔助開采中段。運輸中段的電機車牽引礦車,從采場溜井處裝載礦石并且運輸到主溜井卸礦硐室,將礦石集中下放到-320 m水平的破碎硐室,經破碎系統破碎后再經箕斗提升到地表。
3.2 實際生產數據
該礦區的實際生產的鐵礦產出品位要求、各采場溜井的實際產出量及礦石品位由該礦區的現場提供。此外,從以往的礦石產出品位限制的歷史記錄數據可知實際產出品位要求是22.83%,允許的產出品位偏差波動控制應當在0.5%以內。以原始CAD圖計算得出各個采場溜井到主溜井的實際距離,采場溜井的編號在圖5中段巷道機車運輸道路概念圖中給出。各采場溜井位置到主溜井的行駛距離及采場溜井的實際礦石品位與產出量見表2。
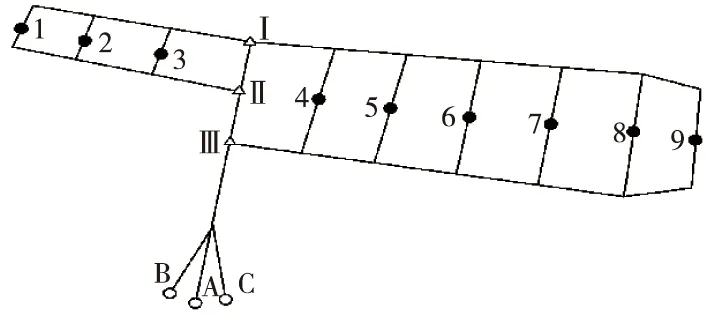
圖5 中段巷道機車運輸道路概念圖
表3給出了某地下金屬礦的實際參數與數據,數據獲取的方式包括文獻查詢以及項目工作人員的實際測算,無人駕駛電機車運行成本的設置參考列車運行成本的測算方法[23],包括電機車整備費,機車運行用電成本,機車修理費等,通過對收集到的數據進行計算得出重車運行與空車運行的單位成本。從云平臺中獲取8輛無人駕駛卡車在2021年9月份的車輛的運行軌跡數據及其他數據信息,獲取原始數據后進行數據處理。通過借鑒完善的數據試驗相關參數設置,在案例試驗部分算法參數的設置保持不變,種群規模大小N為100,交叉概率設置為0.9,變異概率設置為0.1。迭代試驗證明了算法在迭代200次以后,算法所得出的解沒有發生明顯變化,因此將最大迭代次數Maxgen設定為250次。
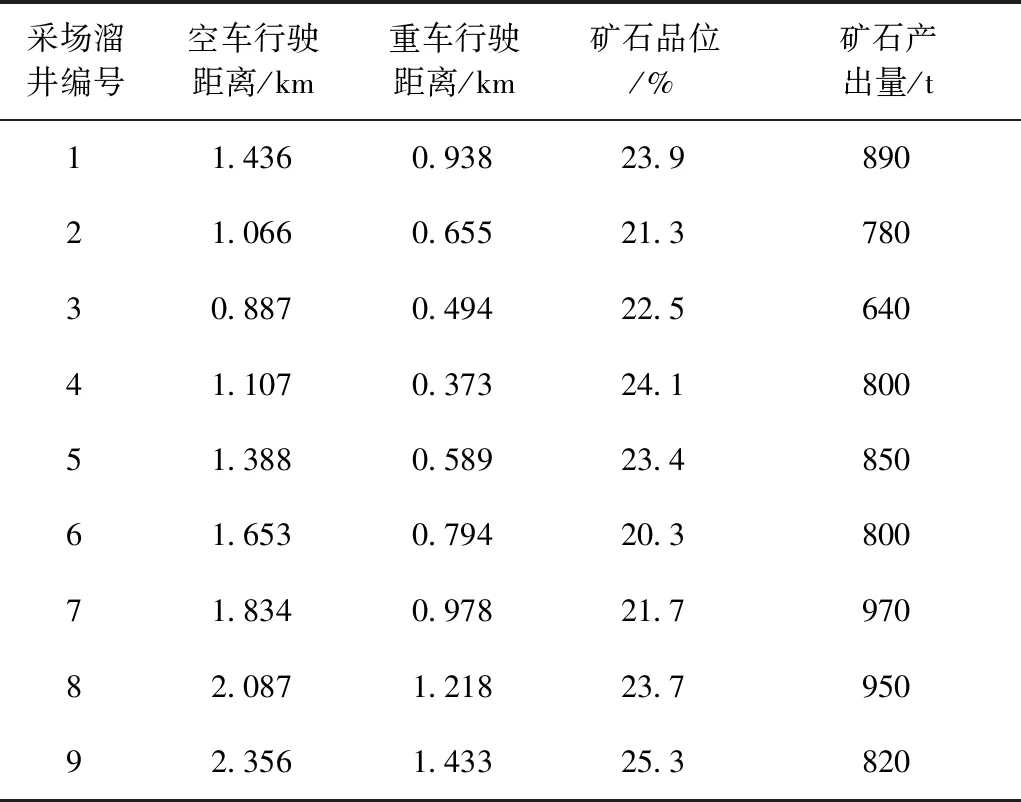
表2 采場溜井相關信息

表3 某礦-320 m水平運輸中段運輸系統實際參數
3.3 對比算法
為了驗證使用距離優勢關系改進后的NSGA-Ⅱ-DDR求解無人駕駛電機車多目標調度優化問題的性能,本文選取了原始的NSGA-Ⅱ、MOEA/D以及SPEA2算法進行試驗對比。
MOEA/D算法:張清富等在2001年提出的一種基于分解的多目標進化算法[24],主要思想是將多目標問題轉化為單目標進行求解,通過對目標空間進行劃分,各個鄰域的存在就是為每個子問題找到的最優的解。
SPEA2算法:Eckart Zitzler等在2001年提出的一種改進了強度帕累托進化算法(SPEA2)[25],在SPEA算法的基礎上使用了一種改進的適應度分配方案,避免由相同個體支配的個體具有相同的適應值的情況,計算每一個個體支配的個數和其他個體支配的個數。
3.4 試驗結果分析
3.4.1 改進后算法有效性驗證
采用改進的NSGA-Ⅱ-DDR算法對某地下金屬礦山的實際生產項目進行優化求解,以完成6 000 t礦石為運輸任務,配備8輛有效載重為60 t的無人駕駛電機車進行運輸作業,需要優化成本和等待時間2個目標。表4給出了算法得到的一組Pareto解集,可以看出解集大小為10,約為設定種群規模的1/10,從側面反映了模型的可行域較為復雜。值得注意的是,使用改進后NSGA-Ⅱ-DDR算法所求得的一組解集并不是Pareto解集,而是基于距離支配關系得到的解集,為了具有更強的客觀性,并且與后續試驗進行比照,在NSGA-Ⅱ-DDR算法求得解集的基礎上進一步使用Pareto支配關系選擇的解作為Pareto解集。從兩個目標的求解來看,目標1表示最小化運輸成本,運輸成本的最大值為7 764.63元,最小值為6 844.55元,兩者之間相差了920.08元。目標2表示最小化等待時間,最大值為185.6 min,最小值為135.3 min,兩者之間相差了50.3 min。兩個目標函數值之間存在的差距從一定層面上能反映出得出的解具有良好的分布性,能在可行域內進行全局尋優。
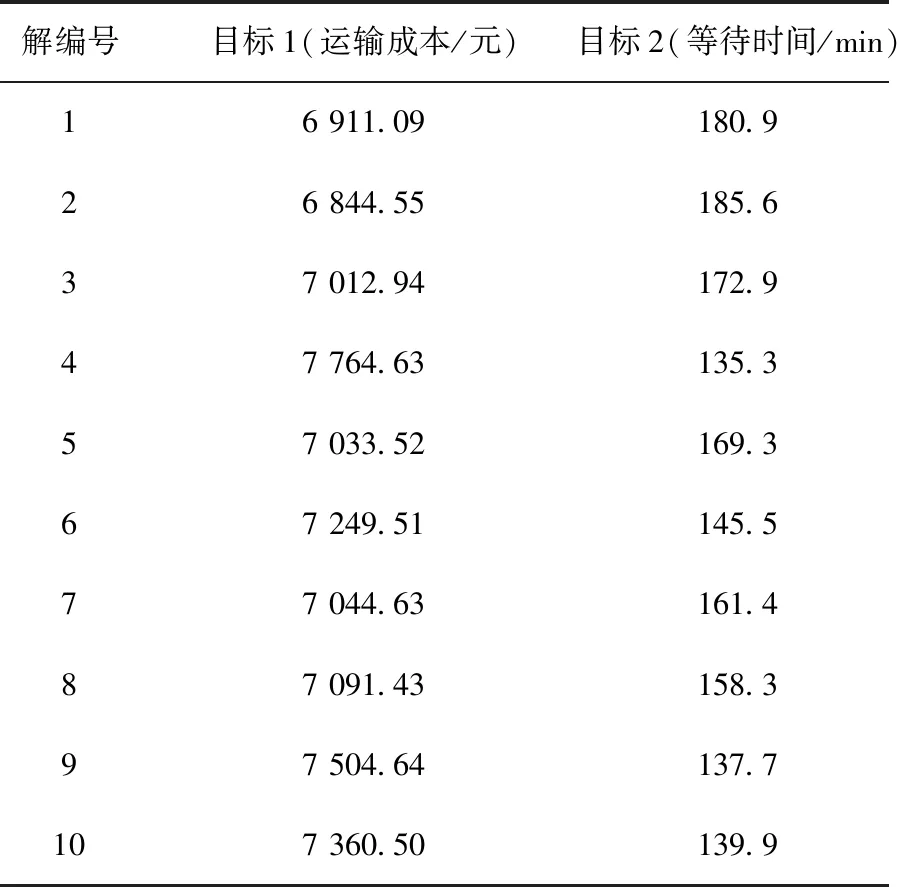
表4 改進NSGA-Ⅱ-DDR算法獲得的帕累托解
為了更直觀的描述解的分布,圖6給出了Pareto解集的分布狀況,由于所有Pareto解的各個目標函數值在一定的區間內,所以在坐標軸上直接選取相應區間范圍。從圖中可以看出算法求得的解具有良好的多樣性,沒有全部集中在某一特定的區域內,這進一步驗證了距離支配關系能有效提升算法的多樣性。
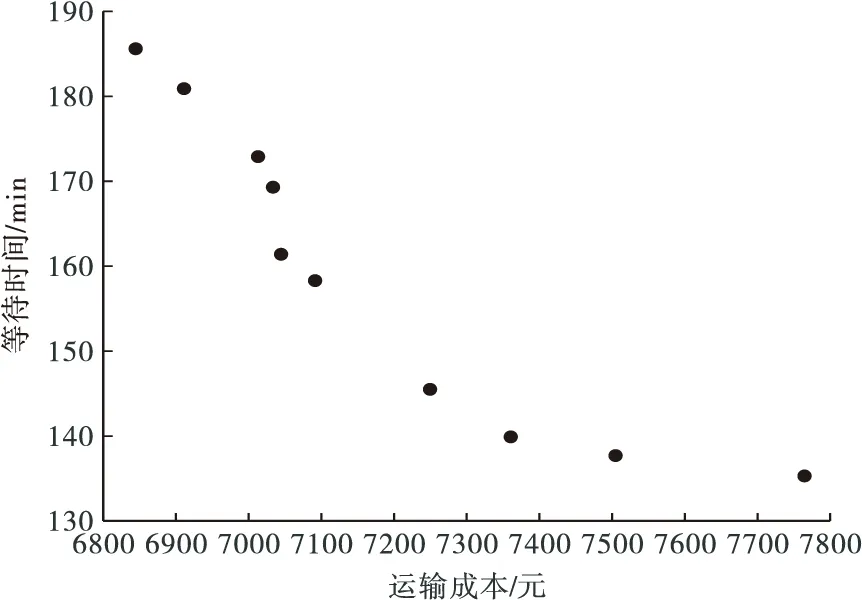
圖6 改進NSGA-Ⅱ-DDR算法獲得的帕累托解集分布圖
上述部分從算法求解的角度分析了算法求解的可行性,但是在實際生產生活中,決策者需要的是有效提升對項目生產的確切利益。因此,需要將試驗結果與項目生產聯系在一起,一組Pareto解集代表著幾個合適的方案,決策層根據企業狀況和生產需要做出合適的選擇。低成本意味著可以直接為項目生產造成收益,從上述Pareto解集中最大的運輸成本是7764元,最小的運輸成本為6844元,生產成本相差920元,節省幅度超過了最大運輸成本的1/10。當項目生產周期長,不需要增加額外生產任務時可以保證項目的低成本運行。當產量需求大,需要盡快完成生產時,最小的等待時間意味著可以高效完成運輸作業,可以偏向于選擇等待時間小的方案。為了進一步展現試驗結果的參考意義,任意選取了Pareto解集中的1號解在表5中給出了具體的無人駕駛電機車運輸調度路線。

表5 Pareto1號解對應的無人駕駛電機車行駛路線
3.4.2 經典算法對比分析
將所有的對比算法獨立運行30次,每次運行完成后計算得出算法的IGD指標[26],通過30次的IGD進行處理得出各算法最終的IGD值。在表6中給出了各對比算法得到的30個IGD指標的最大值、最小值以及平均值,從試驗結果來看,改進后的NSGA-Ⅱ-DDR算法在最大、最小以及平均值上均獲得的最優的值。從NSGA-Ⅱ-DDR與NSGA-Ⅱ兩種算法的結果來看,雖然IGD的平均值差距不是很大,但是從IGD的最小值的差距可以看出NSGA-Ⅱ-DDR能得出更加優秀的解集,這說明NSGA-Ⅱ-DDR有更好的尋優求解能力。整體上來說,NSGA-Ⅱ-DDR算法獲得了最好的評價指標,其次是MOEA/D算法,然后是NSGA-Ⅱ,最差的是SPEA2算法。
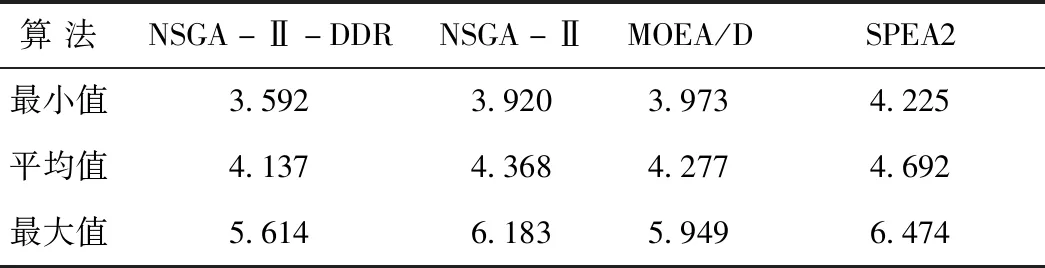
表6 各對比算法獲得的IGD值
為進一步說明算法求解的可靠性,在表7中給出了運輸成本和等待時間2個目標值分別最小時,各種對比算法所求得的所有目標函數值,其中的最優值進行了加粗處理。從目標函數值可以看出NSGA-Ⅱ-DDR算法均取得了最優值,同時在運輸成本與等待時間取得最小值時,NSGA-Ⅱ-DDR算法求得的解與其余算法求得的解形成了Pareto支配關系,這說明改進后算法求得的解是最優的。

表7 運輸成本與等待時間分別最小時各算法的目標函數值
綜合上述分析可知,在各種算法的對比中NSGA-Ⅱ-DDR算法在求解地下金屬礦電機車多目標調度優化問題上相較于NSGA-Ⅱ、MOEA/D以及SPEA2算法具有更優的性能,不僅能為決策者提供更多可選擇的方案,同時這些方案會產生更好的實際效益。因此,從整體上而言,NSGA-Ⅱ-DDR算法用于求解地下金屬礦無人駕駛電機車多目標調度優化模型是比較成功的。
4 結 論
針對地下金屬礦當前存在的生產成本高、運輸效率低的問題,本文通過構建地下金屬礦無人駕駛電機車多目標調度優化模型,并且提出一種新的支配關系對NSGA-Ⅱ算法進行改進,并且在實際生產項目上驗證算法求解的可行性。完成6 000 t礦石的運輸成本最低為6 844.54元,有效降低了生產成本,將等待時間優化到總運行時間的10%以下,提高了生產效率。得出的調度方案避免了電機車在行駛過程中的沖突問題,貼合實際生產需求,為生產實際提供可靠的參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
