一種雙余度機電伺服系統設計仿真與優化
2022-08-25 10:46:52張益齊張國林朱陽貞魏澤宇
導彈與航天運載技術 2022年4期
牛 濤,張益齊,張國林,朱陽貞,魏澤宇
(1. 北京精密機電控制設備研究所,北京,100076;2. 航天伺服驅動與傳動技術實驗室,北京,100076)
0 引 言
近年來,機電伺服系統因其綠色環保、質量較輕、運營及維護成本較低的優點得到廣泛的研究和應用,美國及歐洲均資助了大量機電作動技術科研課題,某些飛行器的輔助飛行操舵系統上部分采用了機電伺服系統。波音公司也在積極探討機電作動器應用于新一代飛行器的優勢和可行性。機電作動器一般由永磁同步電機、滾珠絲杠副等組成,如果要代替液壓作動器,安全性和可靠性是主要解決的問題。眾所周知,絲杠的卡死故障為機電作動器的致命性故障,有些事故的發生就是因為機電作動器無法容錯而導致的飛行控制失效。吳昊等提出在伺服機構在一度故障時,通過隔離故障通道可以提高伺服機構的可靠性。所以,故障容錯和余度技術是機電作動器發展的重要方向。
羅戰強等完成了雙余度稀土永磁無刷電機伺服系統轉矩均衡性研究,解決了雙余度電機電磁轉矩紛爭的現象,但其研究內容不涉及絲杠等傳動部件;Rottach 等對一種容錯的作動系統進行優化設計,但其研究內容只考慮電機容錯的內容;和陽等主要研究了高可靠雙冗余電動舵機控制器;馬瑞卿等致力于研發基于雙余度直流無刷電機的雙余度舵機,但涉及的電動舵機傳動部件還是單點工作模式;付永領等提出的應用于驅動轉鰭機構的推挽式機電作動器,是兩臺作動器同時工作,但不能解決傳動機構卡死后的容錯問題。
本文提出了一種雙余度機電伺服系統,該系統具有余度功能,可以保證傳動機構、伺服電機以及控制驅動器出現故障時依然能正常工作。此外,通過建立系統的MATLAB/Simulink 仿真模型,對系統的性能進行仿真分析,驗證了該系統結構和控制方法的可行性。
基于以上研究成果,本文對雙余度直線式機電伺服系統的機電作動器結構進行優化,減小兩路傳動環節多個零件的慣量,增加傳力結構的剛度,并優化相關控制參數,通過對優化后的伺服系統進行仿真分析,驗證優化方法的有效性,從而得到動態性能更優的雙余度機電伺服系統方案。
1 雙余度機電伺服系統
雙余度機電伺服系統主要由雙余度機電作動器和控制驅動器組成,如圖1 所示,針對高可靠機電作動領域的應用需求,機電作動器采用永磁同步電機,LVDT 傳感器測量絲杠的線位移并反饋給控制器,可以使作動器精確定位;控制驅動器在軟硬件設計上采用備份和多通道形式,具備故障容錯能力,通過交叉反饋技術和在線余度管理策略的復合控制結構,進一步提高系統在故障情況下的瞬態響應特性和容錯性。
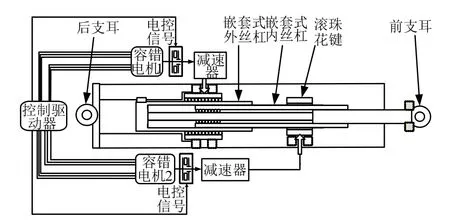
圖1 一種雙余度機電伺服系統Fig.1 A Jam-tolerant Electromechanical System
1.1 機電伺服系統的組成
雙余度機電作動器具有高比功率、緊湊型的特點,如圖2 所示,包括雙電機、嵌套式絲杠副和滾珠花鍵等結構,有主工作模式和備份工作模式兩種傳動模式,當主工作模式發生故障時,可以切換到備份工作模式,從而保證機電作動器的正常工作。嵌套式絲杠副是雙余度機電作動器的重要傳動部件,主要由內絲杠和外絲杠裝配組成,外絲杠在主工作模式工作,內絲杠在備份工作模式工作;外絲杠在主工作過程任何位置卡死時,內絲杠能夠完成行程補償并實現直線輸出,從而使作動器能正常工作。
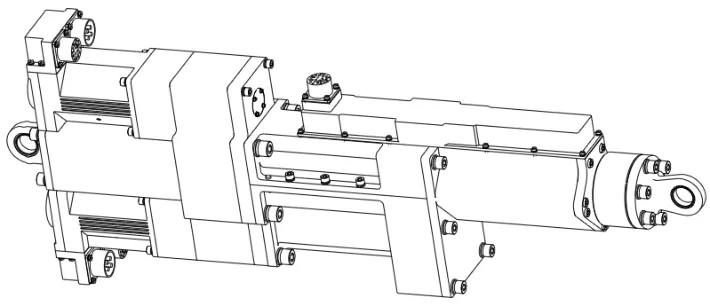
圖2 雙余度機電作動器模型Fig.2 Double Redundancy Electromechanical Actuator Model
1.2 機電伺服系統的工作原理
a)主工作模式:電控信號指令下,制動器斷電制動,將電機2 輸出軸抱死,滾珠花鍵齒輪處于鎖止狀態,內絲杠鎖止,電機1 帶動減速器運轉,驅動外絲杠工作,將旋轉運動轉化為直線運動,內絲杠和滾珠花鍵-齒輪副隨外絲杠絲桿做直線運動,輸出直線位移。
b)備份工作模式,在主工作環節發生故障時,如外絲杠卡塞等,備份工作模式啟動,備份工作模式的工作原理是:在電控信號指令下,制動器將電機1 輸出軸鎖止,外絲杠鎖止,電機2 解鎖,驅動減速器運轉,并通過傳動齒輪,帶動滾珠花鍵-齒輪副運轉,驅動內絲杠工作,從而輸出旋轉直線位移,并在輸出端支耳的作用下,消除旋轉運動,輸出直線運動。
2 建模與參數計算
2.1 建 模
a)永磁同步電機。
采用永磁同步電機,選用MATLAB 庫中的電機模型,根據永磁同步電機(PMSM)的等效電路方程、電磁轉矩方程等建立PMSM 模型。
b)減速器。
行星減速器的傳動關系等效為以下模型:

式中為摩擦力矩;為輸入轉矩;,分別為輸入和輸出轉角;,分別為輸入和輸出轉速;為減速器的減速比;,分別為阻尼和扭轉剛度;為轉動慣量。
c)其它傳動部件。
滾珠絲杠副等傳動部件整體模型(除減速器),輸入轉矩的與輸出線性位移的公式為

式中,分別為扭轉阻尼和扭轉剛度;為輸出位移;為絲杠的導程。
d)舵面模型。
根據伺服系統的實際工作情況建模,機電作動器推動舵面繞轉軸擺動,建立舵面模型的動力學方程為

式中為搖臂長度;為機電作動器推力;為綜合剛度;為搖臂與舵面的初始角度;為舵軸轉動慣量;為摩擦轉矩。
e)控制器模型。
伺服閉環控制算法采用PID 控制,算法見圖3。
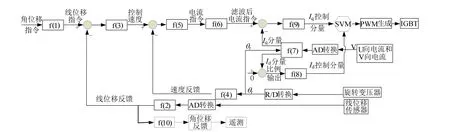
圖3 伺服控制框圖Fig.3 Servo Control Method
f)間隙影響。
滾珠絲杠副因為施加了預緊力矩,消除了間隙,軸系之間的平鍵連接為過盈裝配,傳動無間隙,所以,在建模時只考慮行星減速器的間隙。
行星減速器模型引入死區模型作為間隙模型的表述,表達式如下所示:
式中為減速器輸入軸的力矩;為減速器的扭轉剛度;為輸入端與輸出端經過折算后的相對轉角;為單邊間隙;為阻尼。
2.2 參數計算
a)慣量計算。
1)主工作模式下各傳動環節慣量計算。
電機2 被制動器抱死,電機1 在指令輸入后工作,帶動減速器工作,并將運動通過外絲杠傳遞到作動器支耳,輸出直線運動。
該工作模式包含的慣量環節主要有:電機轉子、制動器轉子、行星減速器組件(太陽輪、行星輪、外齒圈等)、角接觸球軸承、主工作齒輪、鎖緊螺母、外絲杠螺母以及平動的其它組件(包括嵌套式絲杠其余部分、傳感器連接部分、前支耳組件等)。
轉動部件的轉動慣量可以根據公式得到:

式中為回轉體半徑;為密度;為體積。
直線運動部件(包括嵌套式絲杠其余部分、前支耳組件等)可以根據以下公式完成慣量折算:

式中為平動部件的質量;為動量。
各傳動部件慣量折算到電機軸慣量可得:

式中為電機轉子的轉動慣量;為傳動部件的總慣量;為電機到傳動部件的減速比。
2)備份工作模式下各傳動環節慣量計算。
電機1 被制動器抱死,電機2 在指令輸入后工作,帶動減速器工作,并將運動通過傳動軸和滾珠花鍵副傳遞到內絲杠,內絲杠螺母邊旋轉邊直線運動,最后通過前支耳組件的作用,輸出直線運動。
該工作模式包含的慣量環節主要有:電機轉子、制動器轉子、行星減速器組件、傳動軸、傳動齒輪、鎖緊螺母、滾珠花鍵螺母、內絲杠螺母以及平動的組件(包括傳感器連接部分、前支耳組件等)。
轉動部件(制動器轉子、傳動軸、傳動齒輪、鎖緊螺母、滾珠花鍵螺母、內絲杠螺母、減速器等)慣量可以根據式(5)得到,直線運動部件(包括支耳組件等)可以根據式(6)完成等效慣量折算,各傳動部件慣量折算到電機軸慣量可以根據式(7)計算。
b)剛度計算。
1)行星減速器扭轉剛度。
行星減速器剛度主要包括輸入軸剛度、輸出軸剛度、太陽輪剛度、行星輪剛度和行星架剛度。
在計算過程中,選取輸出軸鎖定,對于輸入軸和輸出軸,扭轉剛度用以下公式計算:

式中l為軸受扭矩作用的軸長度;為軸的抗扭截面強度; I為極慣性矩;對于輸入輸出軸,=1,2。
齒輪的剛度可近似用下面公式計算:

式中為齒寬;為齒厚;為齒輪材料彈性模量;為齒輪節圓半徑;為齒高。對于3 個齒輪,=3,4,5。
減速器總扭轉剛度:

2)滾珠絲杠副剛度。
由于外絲杠與內絲杠的導程、接觸角、滾珠直徑、螺紋滾道曲率半徑相同,故接觸剛度與內絲杠的相同。
內絲杠螺母、外絲杠螺母,剛度K計算方法如下:

式中E為彈性模量;為截面積; l為配合長度。
內絲杠絲桿、外絲杠絲桿由連續的變截面結構組成,剛度用公式計算:

式中為彈性模量; A為截面積;l為結構長度。
內絲杠接觸副和外絲杠接觸副的剛度通過接觸理論公式計算得到。
滾珠與絲杠滾道的彈性趨近量:

式中為作用滾珠數量;F為作用力;為接觸角。
滾珠與螺母滾道的彈性趨近量:

則絲杠滾道與螺母滾道的軸向彈性趨近量為

滾珠絲杠副軸向接觸剛度為

式中為絲杠預緊力;為外加軸向載荷。
剛度環節為串聯關系,滾珠絲杠副的總剛度計算:

通過以上的計算,得到伺服系統主工作模式和備份工作模式的慣量和剛度,以此作為仿真模型的參數,進行后續的仿真計算。
3 故障切換控制策略
表1 為各故障模式。在伺服系統工作過程中,若通過表1 中監測方法檢測到對應的故障模式,則從主工作模式切換到備份工作模式,從而保證伺服系統繼續工作。
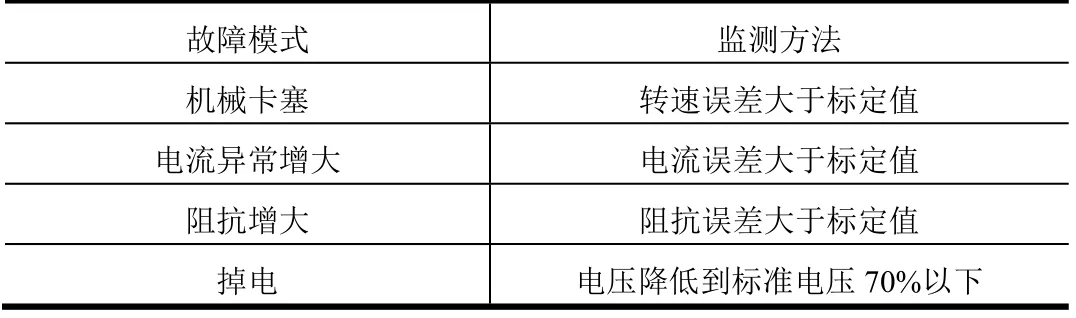
表1 故障模式表Tab.1 Failure Mode
由于主工作模式和備份工作模式的機械傳遞路線不同,轉動慣量、剛度等特性不相同,在遇到故障進行余度切換時,需要針對兩種工作模式提出不同的控制策略和控制算法。這兩種控制算法分別適應主備工作模式,使得切換以后,機電伺服系統的功能和性能都應滿足要求。
4 仿真分析
4.1 模態仿真分析
分別針對兩種工作模式,完成兩種條件下的仿真分析,從而得到正弦掃頻指令信號下,伺服系統的輸出和信號之間的關系。
基于控制方法,對不同模式的工作情況進行仿真分析。仿真結果展示了作動器主工作模式下的頻率響應曲線(見圖4),以及備份工作模式下的頻率響應曲線(見圖5)。通過頻率特性曲線可知,主工作模式下,幅值衰減到-3 dB 時,頻率約15 Hz,對應相頻約-63°,而在備份模式下幅值衰減到-3 dB 時,頻率約14.6 Hz,對應的相頻約-66°。兩種工作模式下,備份工作模式的動態特性比主模式稍微差一點,但都滿足要求。
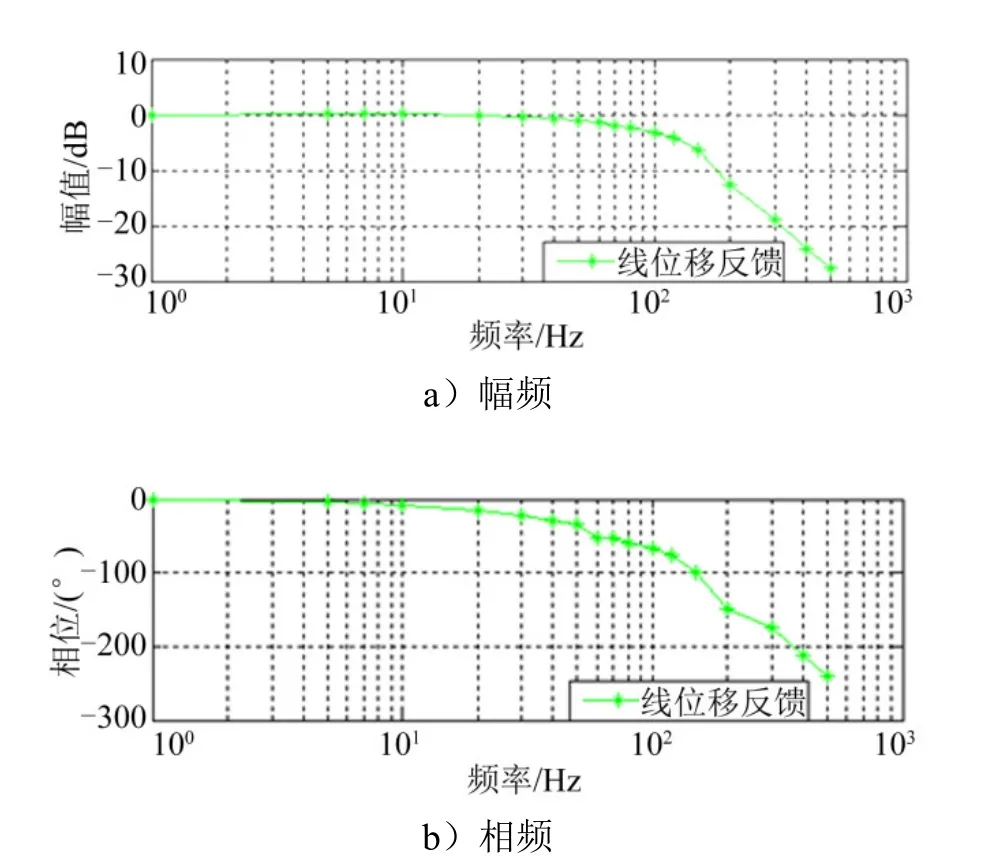
圖4 主工作模式的頻率特性響應曲線Fig.4 Frequency Response Curve in Main Operating Mode
圖5 備份工作模式的頻率響應曲線Fig.5 Frequency Response Curve in Backup Mode
4.2 優化設計
通過對主工作模式和備份工作模式的傳動齒輪、電機、滾珠絲杠副、滾珠花鍵等結構進行優化,減小轉動部件的轉動慣量,同時優化控制參數,以提高兩種工作模式下的動態響應能力。
4.3 優化后模型仿真分析
將優化后的物理參數和控制參數輸入到仿真模型中,對兩種工作模式再分別進行仿真分析,得到主工作模式的仿真結果如圖6 所示,備份工作模式的仿真結果如圖7 所示。通過頻率特性曲線可知,在主工作模式下,相比原動態性能,優化后的模型動態特性指標由15 Hz 提高到18.5 Hz,而在備份工作模式下,優化后的模型動態特性指標由14.6 Hz 提高到17.5 Hz。經過優化結構和控制算法,兩種工作模式的動態特性均有提高,主工作模式動態性能提升更多。
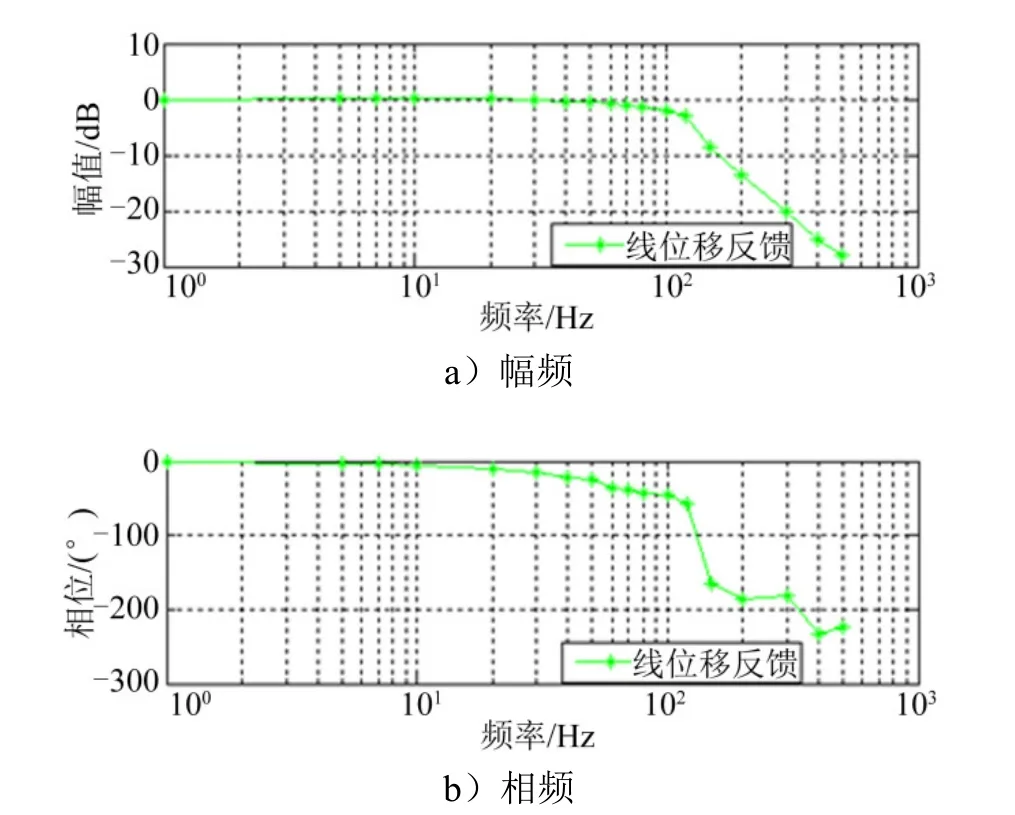
圖6 優化后主工作模式仿真結果分析Fig.6 Simulation of the Main Working Mode after Optimization
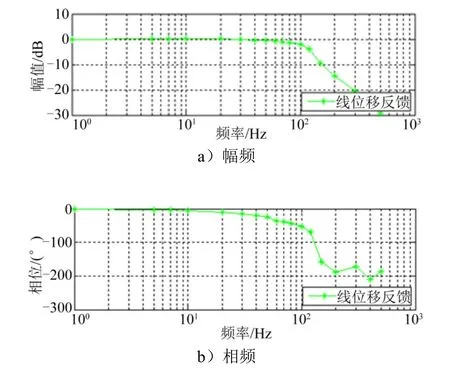
圖7 優化后備份工作模式仿真結果分析Fig.7 Simulation of the Main Working Mode after Optimization
5 結束語
本文提出一種雙余度機電伺服系統,通過主備兩種工作模式實現伺服機構雙余度的功能,滿足單路故障時系統的正常工作要求。通過建立系統的MATLAB/Simulink 仿真模型,對伺服系統的性能進行仿真分析,并在分析結果的基礎上,優化伺服系統的模型和控制算法,從而提高了該系統的動態響應能力。