高超聲速飛行器LPV 魯棒變增益控制
2022-08-25 10:46:42鄭總準
導彈與航天運載技術 2022年4期
鄭總準,鐘 聲,馬 爽
(北京航天自動控制研究所,北京,100854)
0 引 言
高超聲速飛行器為實現長距離滑翔,飛行器多采用面對稱布局的高升阻比外形,且飛行空域大,速度變化大,臨近空間飛行環境未知,同時高速飛行時表層的燒蝕和脫落也會帶來飛行器特性的改變,這些因素使得飛行器成為強耦合、快時變、非線性和不確定的復雜對象,給飛行器姿態控制設計帶來了很大的困難和挑戰。
現有的非線性控制系統設計方法理論分析上有其獨特的優點但卻不適于工程實現。傳統的工程設計通過成熟的線性化方法,將線性系統的控制方法拓展到非線性系統中來,但高超聲速飛行器在飛行過程中高度、速度、攻角、動壓隨著飛行軌跡發生劇烈變化,系統狀態距離線性化的平衡點較遠,系統參數變化較快,外界擾動強,因此傳統的工程方法存在明顯的缺陷。線性參數變化系統(Linear Parameter-Varying,LPV)理論的出現彌補了傳統控制的不足。
LPV 系統本質上是非線性系統的一種近似方法,它最先由Shamma 等于1988 年提出。隨后,由于魯棒控制理論的進一步發展,LMI 矩陣不等式求解工具箱的出現以及最優控制和預測控制理論及神經網絡理論的進一步完善,LPV 系統的穩定性、魯棒性能及控制器的設計有了新的發展。Salman 等將LPV 方法應用到了一類飛行器控制器設計中,并基于線性矩陣不等式理論和依賴參數的李雅普諾夫函數方法進行控制器參數設計。Lim 則是將一種廣義的LPV 控制方法應用到導彈的自動導航系統中,利用LPV 系統的控制方法和非光滑LPV 系統技術設計控制器,獲得了理想的控制效果。Zarei 對多變量短距離飛機垂直起降系統設計了LQG/LTR 控制器和混合靈敏度控制器,并比較了它們之間的優缺點。Roche 研究了LPV 方法在機器人控制系統上的應用,提出了基于LPV 的控制器設計。Polat 將LPV 控制方法應用到拖拉機拖車行駛穩定性的控制上,Jung 等分別對柴油機的增壓系統和通風系統建立了LPV 控制系統并利用LPV控制方法設計了控制器。
雖然LPV 控制理論及其應用研究已經很多,但是針對的對象都是要求參數能精確測量且無建模誤差的系統,對參數測量存在誤差和非線性系統轉化成LPV系統過程中存在建模誤差的模型的研究涉及甚少。本文提出了一種適用于高超聲速飛行器的參數不確定性LPV 系統建模方法,基于LPV 理論考慮參數的不確定性,描述飛行器系統內在的非線性和時變特性,進而,通過求解一個線性正矩陣不等式的凸優化問題,設計了具有自調節法則的魯棒變增益控制律。
1 高超聲速飛行器LPV 系統建模
1.1 動力學模型
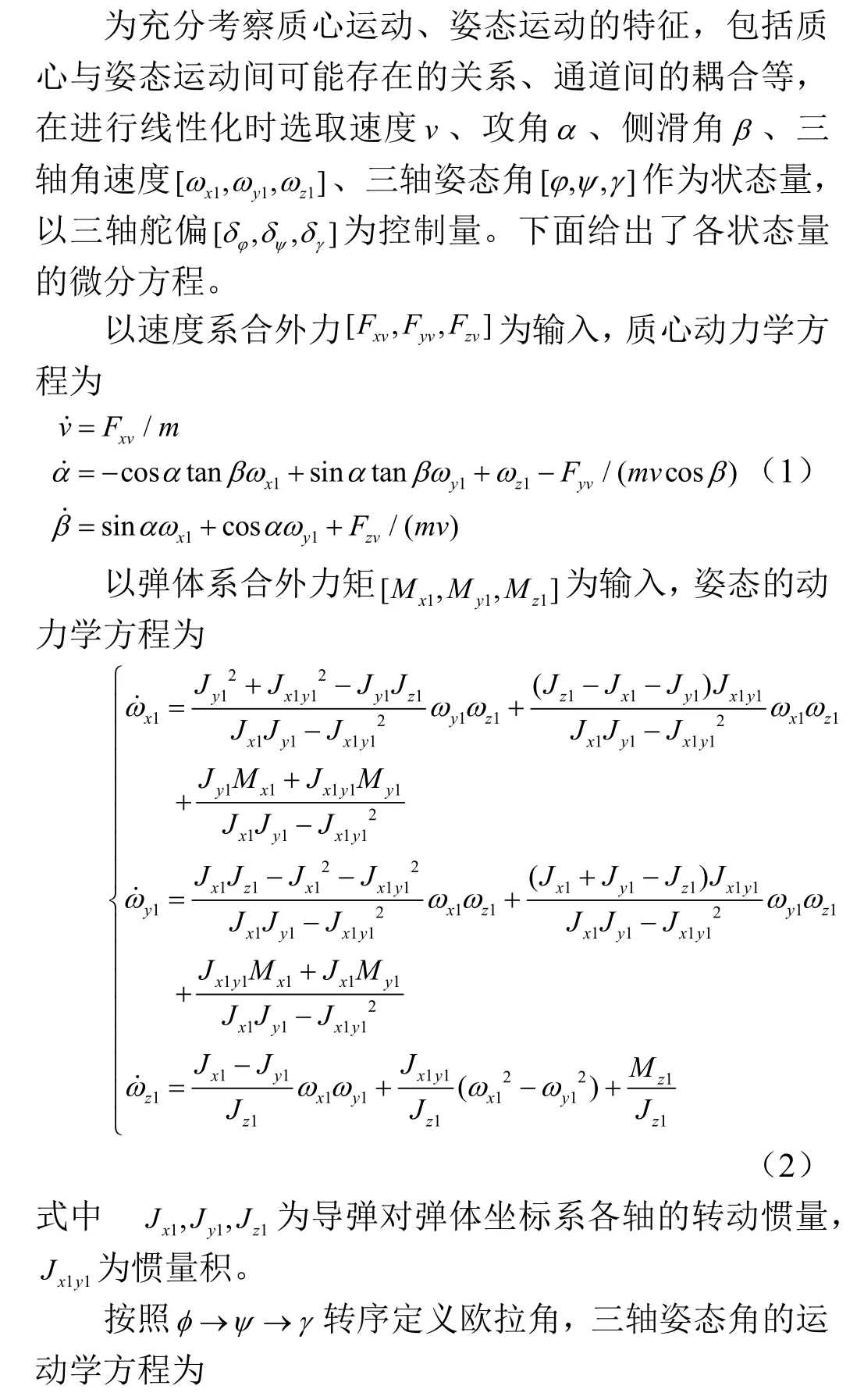

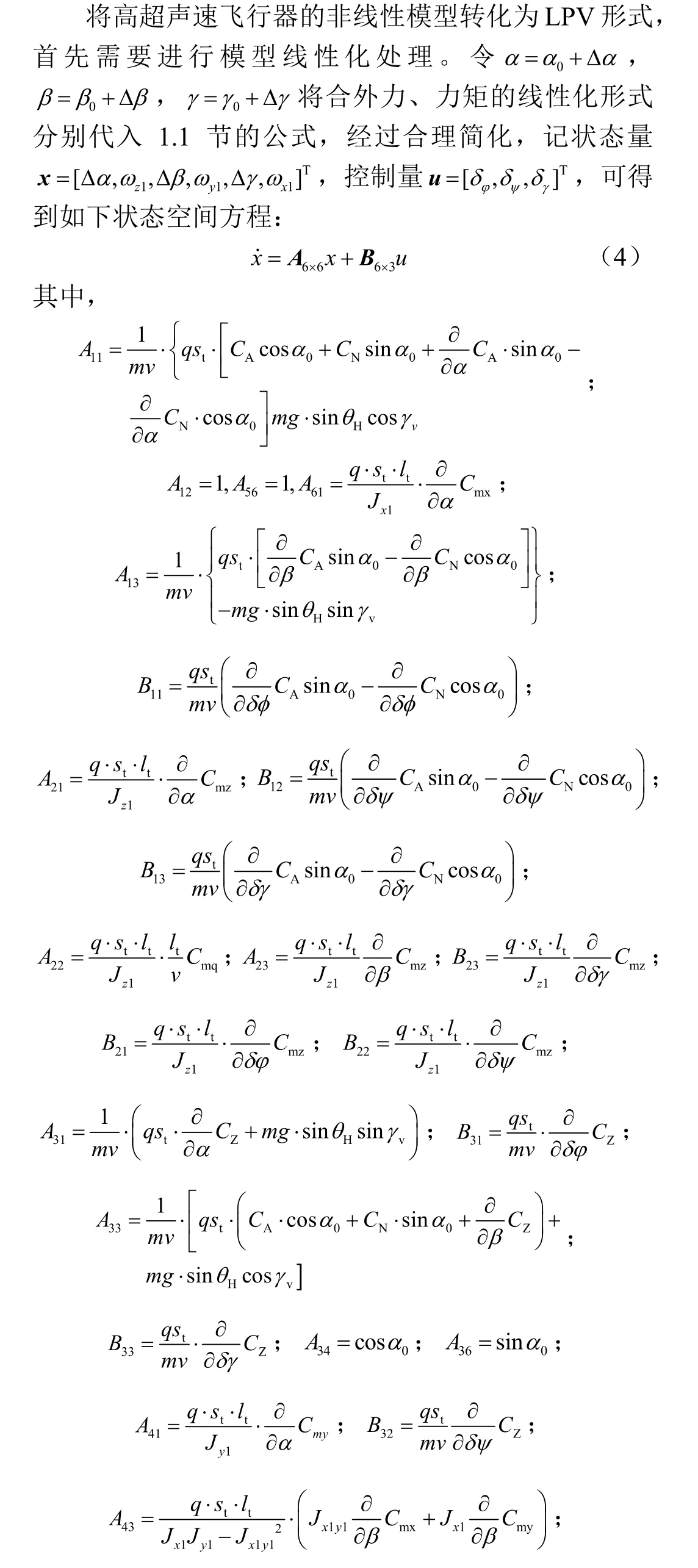
1.2 模型線性化

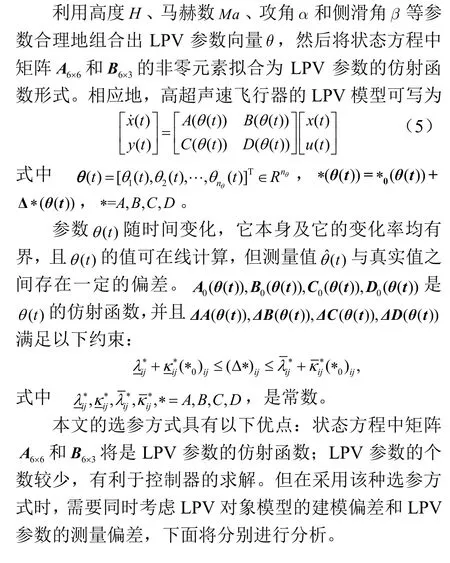
1.3 參數不確定的LPV 系統模型
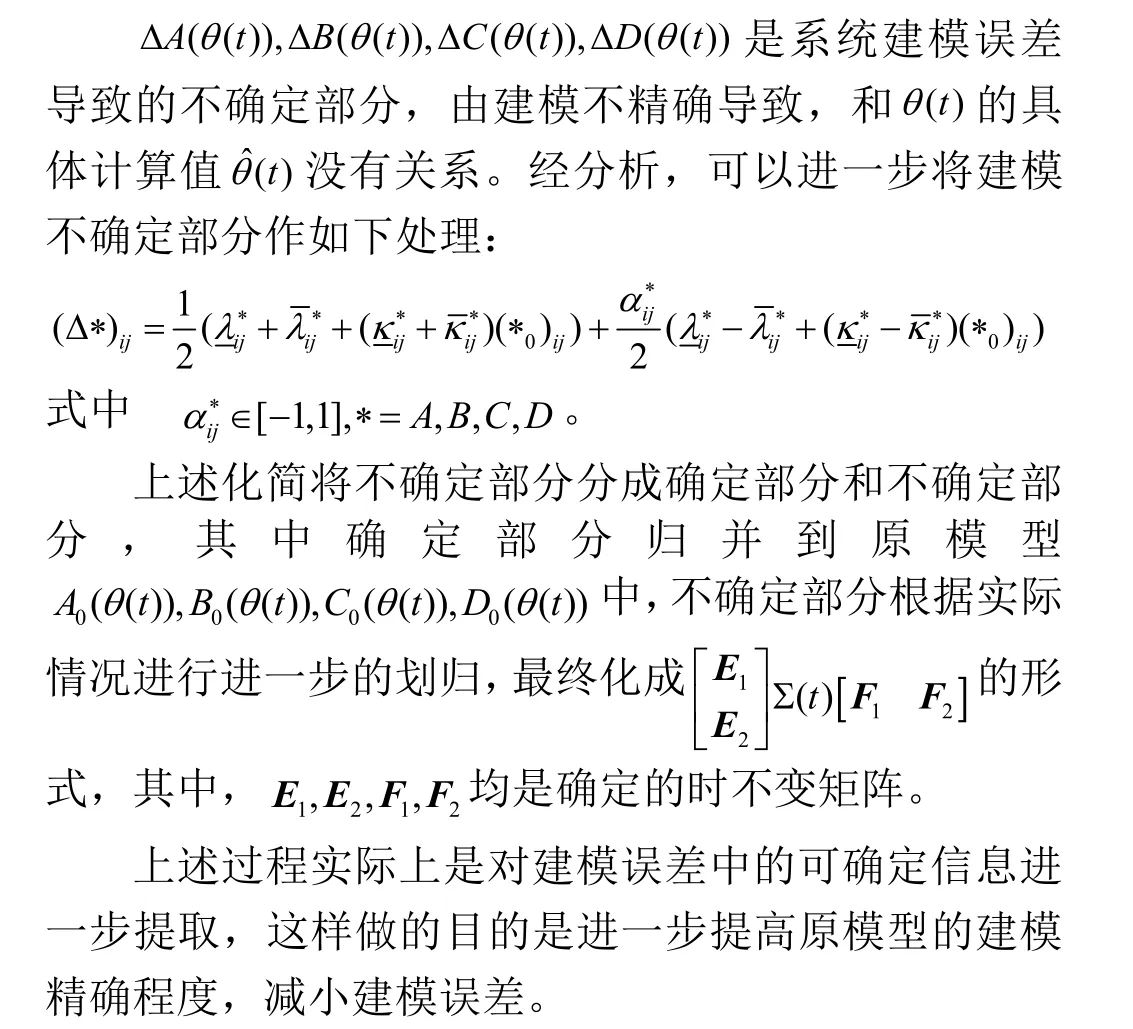
1.3.1 系統建模誤差處理
當前,隨著經濟的快速發展,人們的物質生活水平在不斷改善和提高,對建筑的需求也就越來越多。隨著建筑工程的不斷增多,一些地區不斷被開發,但是眾多建筑物的建設也給地基帶來了嚴重的壓力,極易導致地基基礎下沉的狀況,其中,陜西地區由于其獨特的地質構造和土質類型,相較于其他地區更容易發生地基沉降的現象,本文主要對發生地基基礎下沉現象的原因進行分析,希望能夠從中發現一些對應的策略,改善我國的整體狀況,促進建筑行業的不斷發展,推進建筑行業的現代化進程。
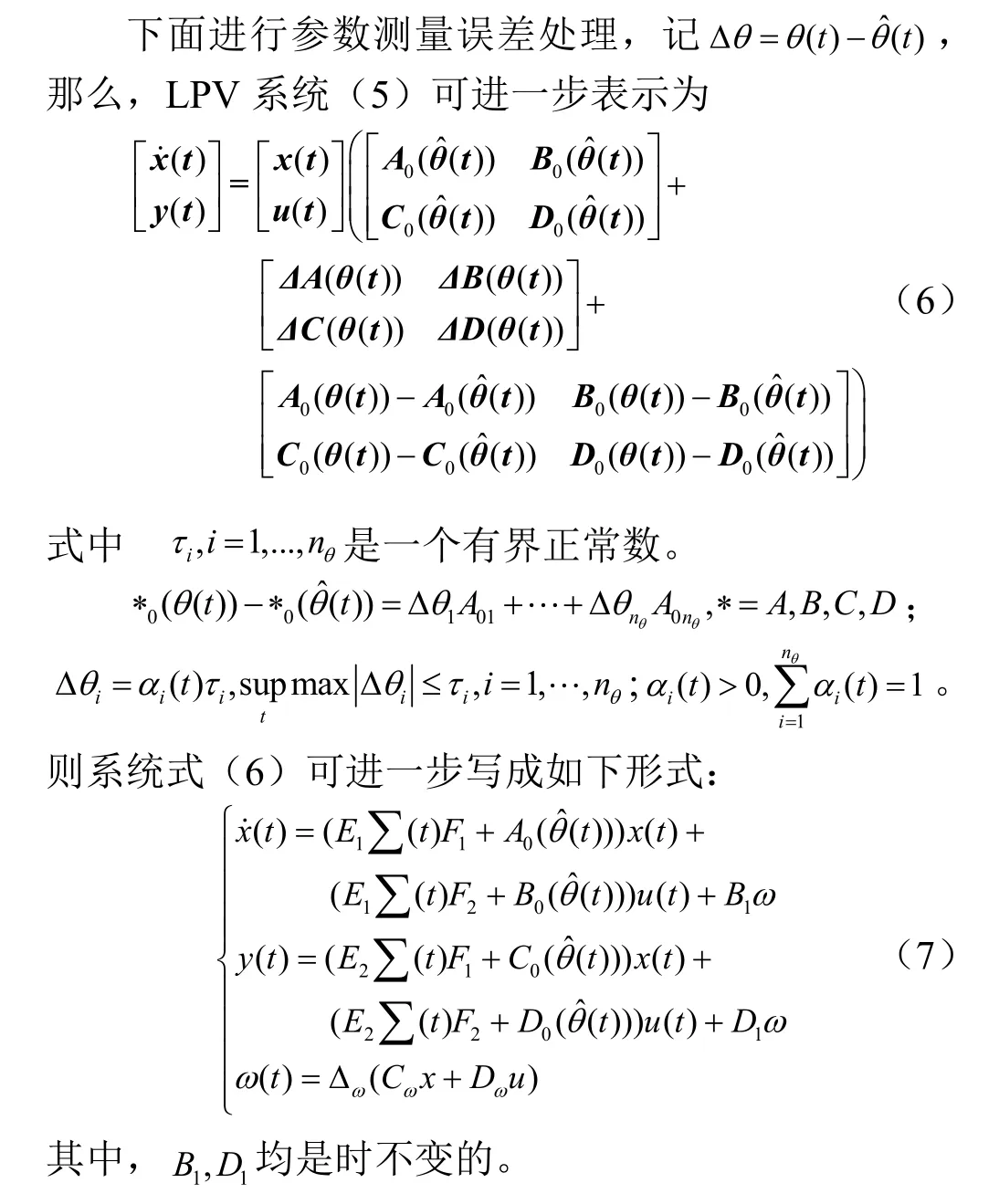
1.3.2 LPV 參數測量誤差處理
2 基于LPV 系統的變增益控制器設計
對于LPV 系統(7),令為可測量輸出,則LPV系統可進一步寫成:

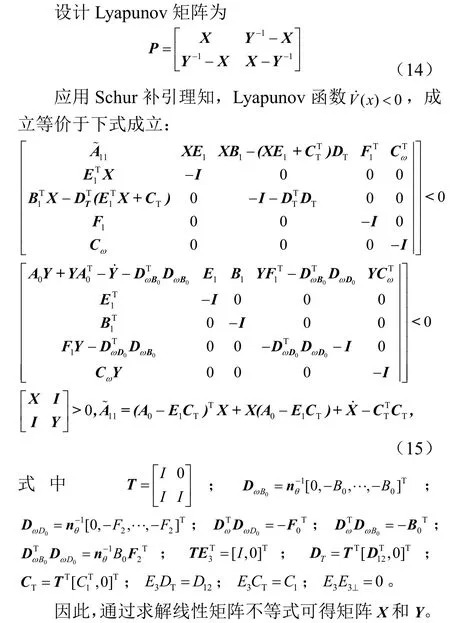
2.1 求解線性矩陣不等式得到矩陣X 和Y
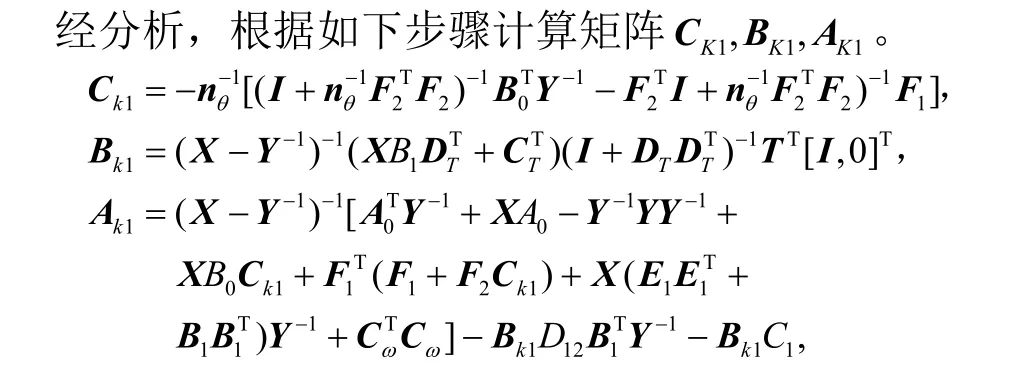
2.2 求解矩陣依次得到CK1,ΒK1,AK1


3 仿真分析
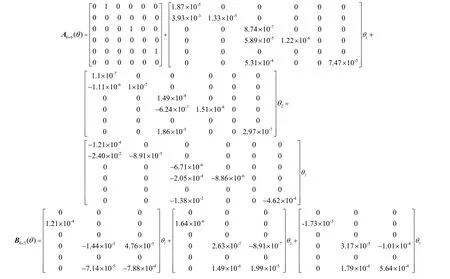
基于上述LPV 模型,可設計魯棒變增益控制器,仿真結果如下。額定狀態下的仿真結果如圖1~3 所示。
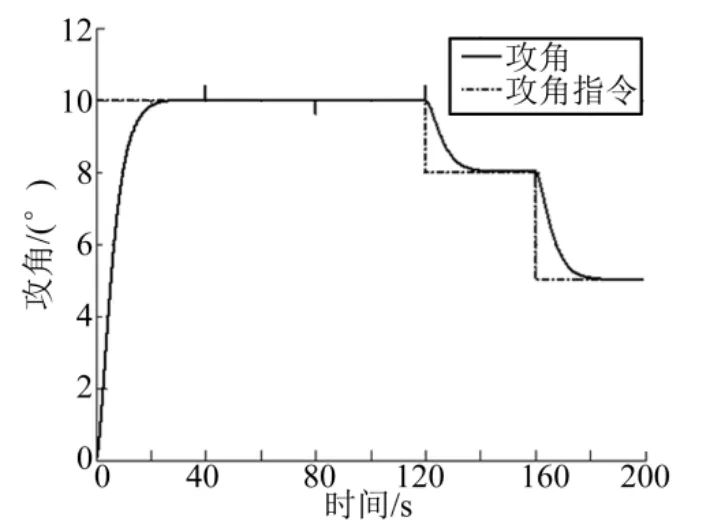
圖1 攻角與攻角指令曲線Fig.1 Curves of Angle of Attack (AOA) and AOA Command
圖2 側滑角與側滑角指令曲線Fig.2 Curves of Slideslip Angle and Slideslip Angle Command
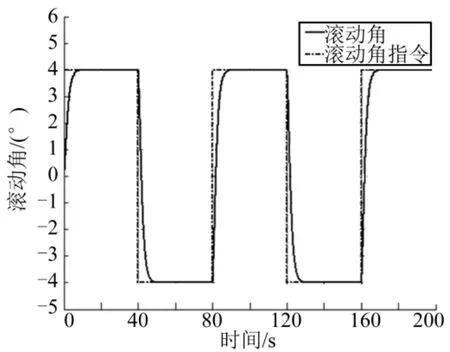
圖3 滾動角與滾動角指令曲線Fig.3 Curves of Roll Angle and Roll Angle Command
從仿真結果可以看出,基于LPV 模型的魯棒變增益控制器可以在保持閉環系統穩定的同時,實現對指令的跟蹤,并且具有足夠的精度。拉偏狀態下的仿真結果如圖4 至圖6 所示。由圖4 至圖6 可以看出,在參數拉偏的情況下,姿態角仍然可以快速平穩地收斂,由此說明LPV 模型的魯棒變增益控制器具有有較好的魯棒性。
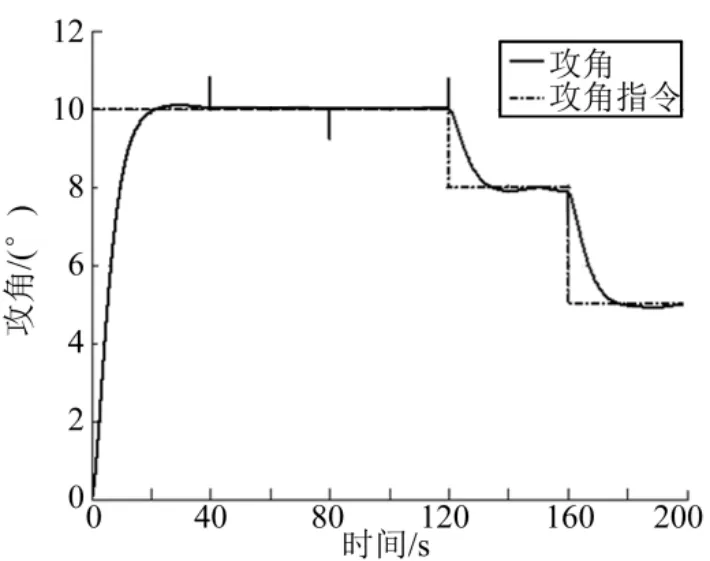
圖4 攻角與攻角指令曲線(拉偏)Fig.4 Curves of Angle of Attack (AOA) and AOA Command(deviation)
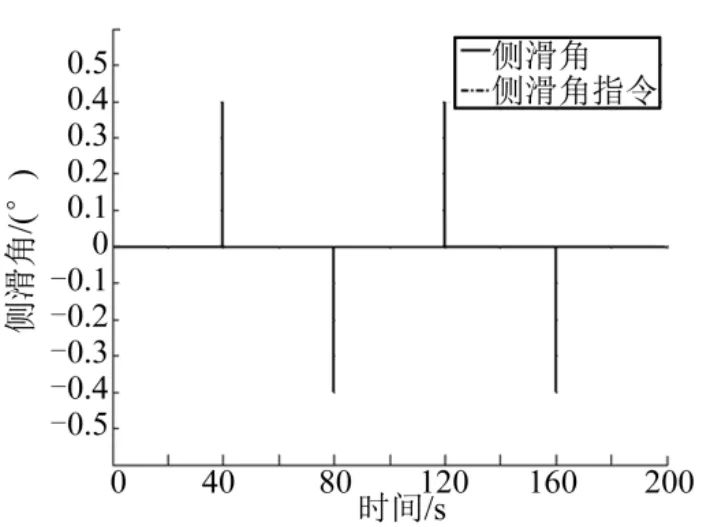
圖5 側滑角與側滑角指令曲線(拉偏)Fig.5 Curves of Slideslip Angle and Slideslip Angle Command(deviation)
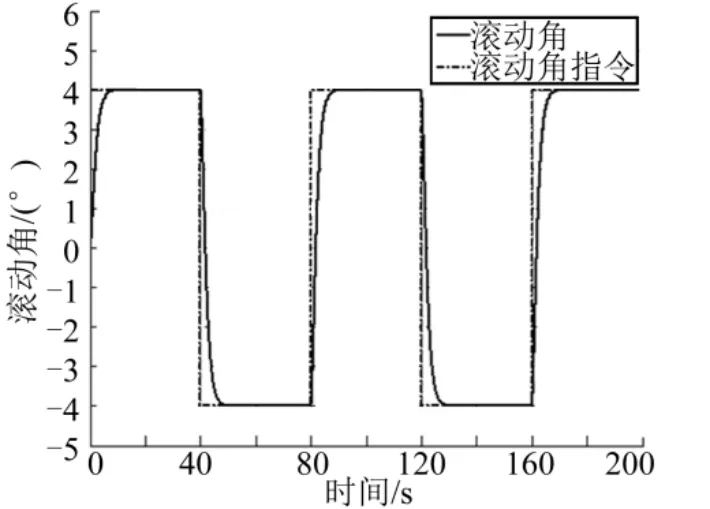
圖6 滾動角與滾動角指令曲線(拉偏)Fig.6 Curves of Roll Angle and Roll Angle Command (deviation)
4 結束語
本文針對帶有非線性、參數快變、不確定性的高超聲速飛行器的姿態控制問題,提出了一種LPV 魯棒變增益控制方法。首先,建立了參數不確定的LPV 系統模型,進而通過對建模誤差和測量誤差的分析和有用信息的進一步提取,提高了建模精度;然后,設計了具有自調節法則的魯棒變增益控制律,使得閉環系統穩定的同時,具有良好的動態性能和穩態性能;最后,通過仿真驗證了設計的LPV 魯棒變增益控制方法的有效性和魯棒性。