高速飛行器橫側向耦合振蕩發散機理及控制策略研究
2022-08-25 10:46:30孫超逸劉全軍劉秀明
導彈與航天運載技術 2022年4期
孫超逸,劉全軍,王 穎,劉秀明
(空間物理重點實驗室,北京,100076)
0 引 言
對于面對稱高速飛行器,在布局設計過程中重點關注橫側向控制特性,主要由于面對稱布局導致橫側向耦合嚴重,而方向舵的安裝位置及偏轉范圍受防隔熱約束,導致橫側向穩定控制是面對稱高速飛行器的設計難點。
針對上面提及的橫側向耦合振蕩發散問題,本文從機理層面分析出橫側向耦合振蕩發散的原因,并從控制角度提出改善橫側向耦合振蕩發散的控制策略。最后,通過仿真驗證控制策略的有效性。
1 高速飛行器橫側向耦合振蕩發散機理
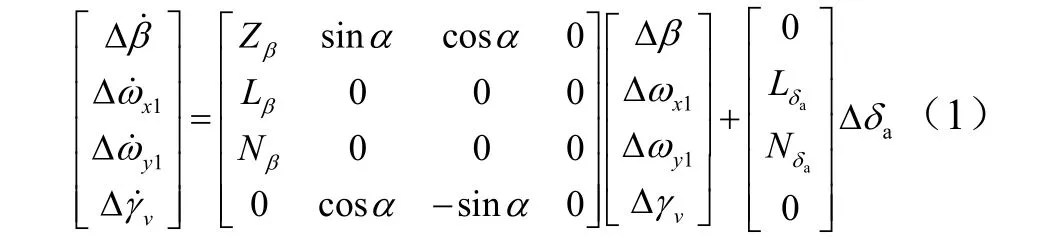
飛行器在正攻角飛行狀態下,受限于防隔熱的需求和背風面方向舵舵效過低的因素,其橫側向通道控制僅能依靠滾動舵偏(副翼差動),橫側向通道狀態方程如式(1)所示,由于重力項、阻尼項對穩定性分析的影響較小,對橫側向狀態方程進行了簡化,略去了其中的重力項和阻尼項。
飛行器橫側向的運動主要分為3 個典型的運動模態:滾轉模態、荷蘭滾模態和螺旋模態。在外界瞬時擾動下,橫側向各個飛行狀態隨時間的變化就是這3個典型模態的迭加。在橫側向的3 個運動模態中,荷蘭滾模態最重要的,在很大程度上表征了橫側向的動穩定性。
常規控制策略是滾動舵偏反饋傾側角實現指令跟蹤,反饋滾轉角速度增加阻尼,控制方程為

應用根軌跡法進行分析,在正虛軸平面,隨著滾轉舵偏對滾轉角速度反饋增益的增大,閉環極點是逆時針接近零點的,由于阻尼較小,零極點均非常靠近虛軸,如果零點位于極點之上,那么增益設計空間很小,系統很容易出現正根,造成振蕩發散;如果零點位于極點之下,就可以避免出現正根。因此問題的關鍵在于明確零、極點在虛軸投影的位置關系。
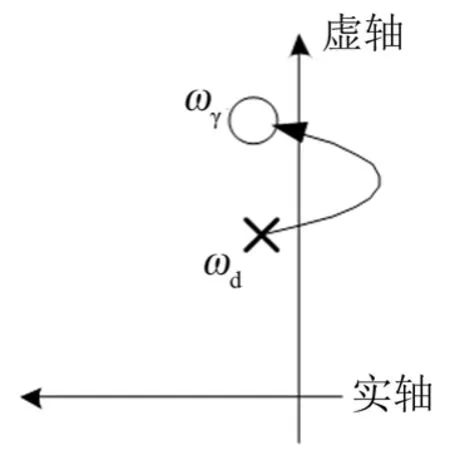
圖1 零極結構根軌跡Fig.1 Root Locus Diagram for Zero-pole Configuration
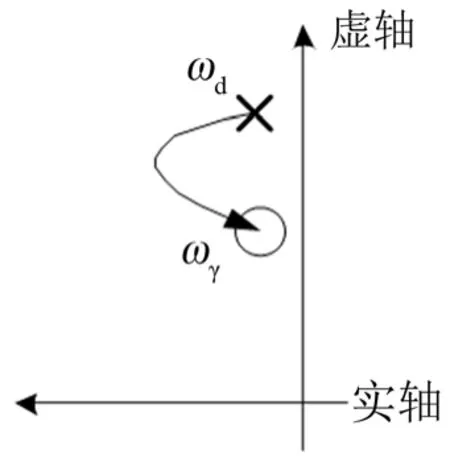
圖2 極零結構根軌跡Fig.2 Root Locus Diagram for Pole-zero Configuration
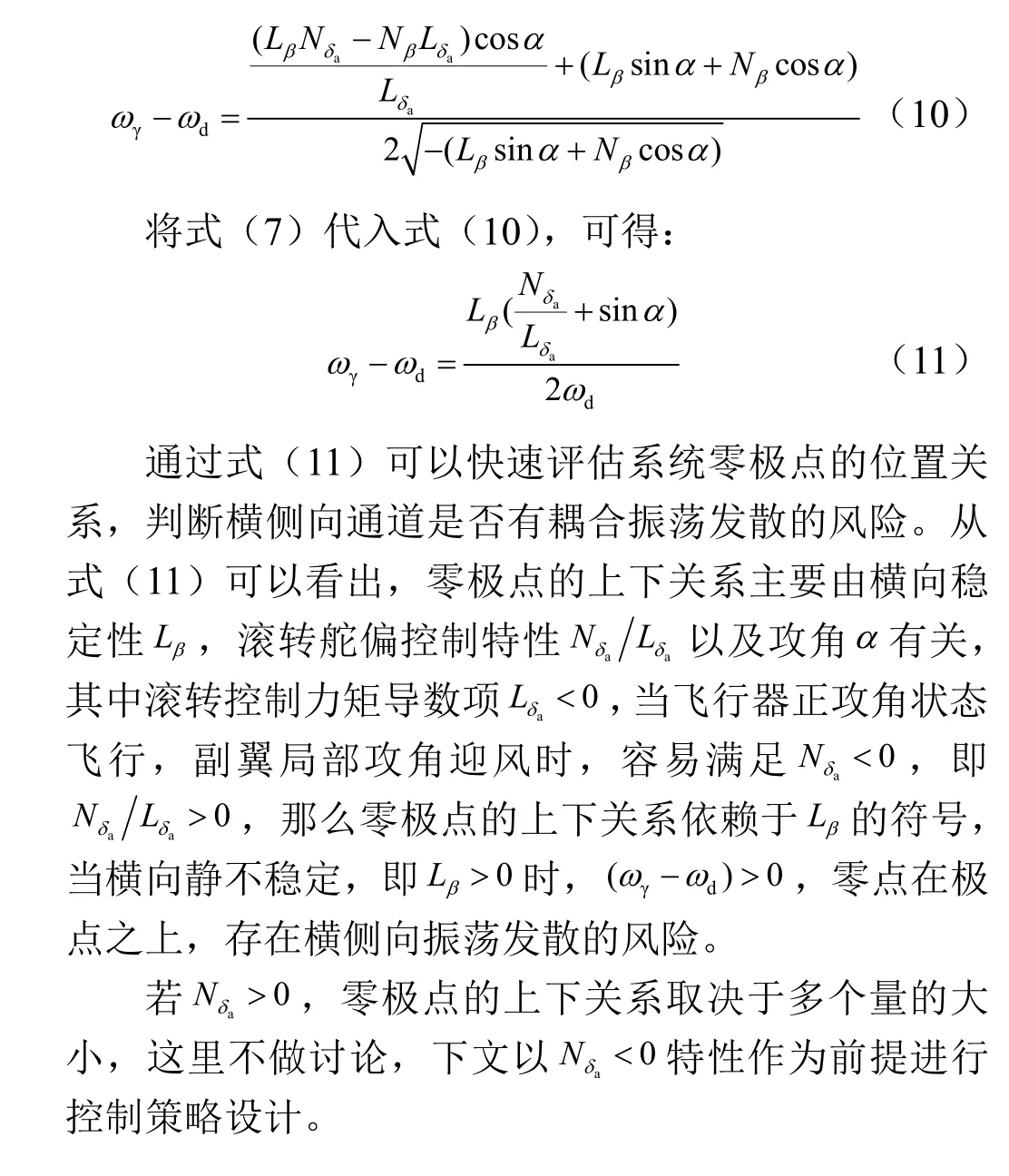
根據式(1),可以推導得到由氣動導數表示的傳遞函數:


2 針對橫側向耦合振蕩發散問題的控制策略研究
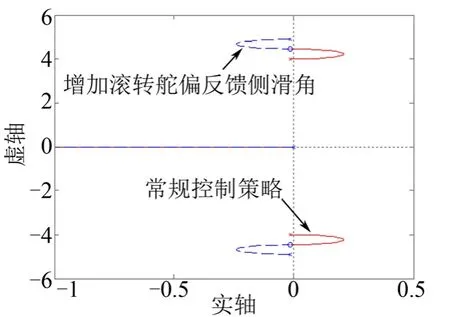
圖3 kvγ 變化時根軌跡對比Fig.3 Comparison of Root Locus Diagram with variable kγv
3 仿真驗證
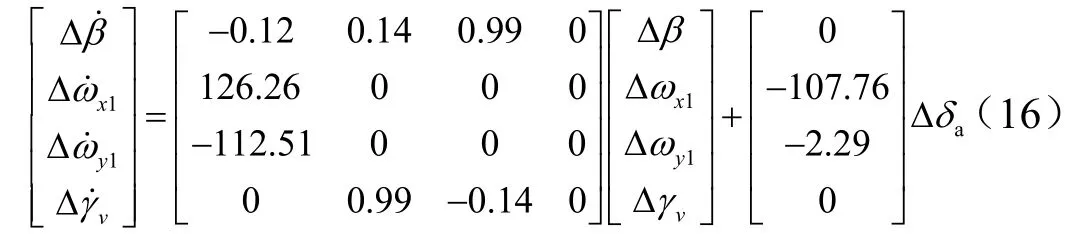
典型飛行工況下,飛行器橫側向運動方程為
這些蛋白不斷進步的同時,顯微鏡技術的發展也使人們得到更清楚的圖像,科學家希望以此解決神經科學最大的謎團:腦中的細胞是如何共同運作將電信號轉換為思想、行動和情感的。研究者仍然希望可以捕捉到全范圍的腦活動,并試著設計出新方法來觀察腦組織內快而深的神經沖動。如果這些技術難題被攻克,紐約市哥倫比亞大學研究神經環路功能的拉斐爾·尤斯特(Rafael Yuste)指出:“這將是革命性的。”
采用常規控制策略,控制方程為
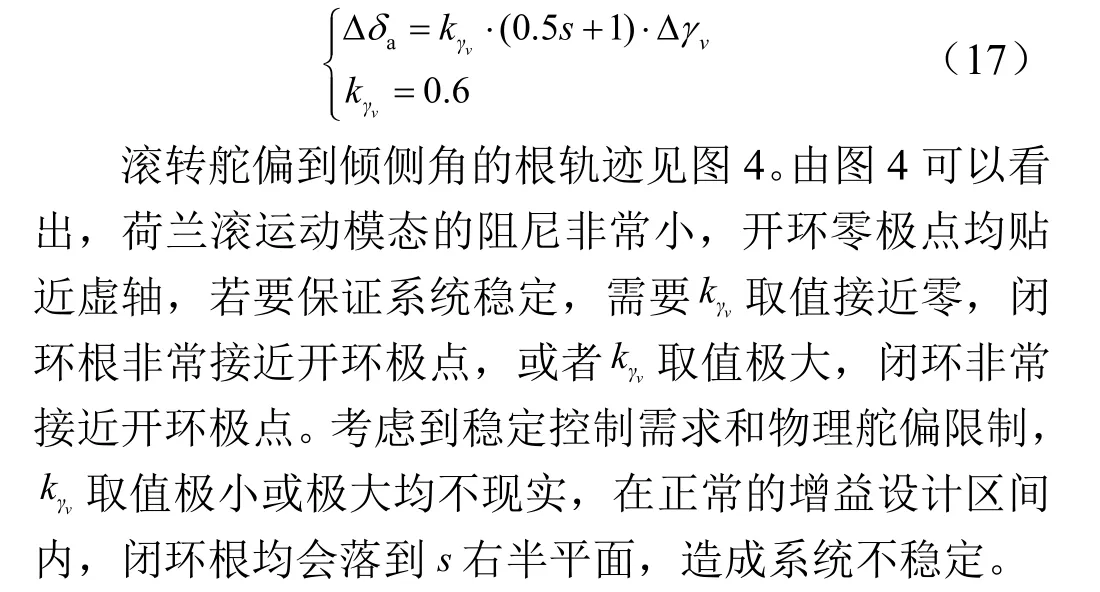
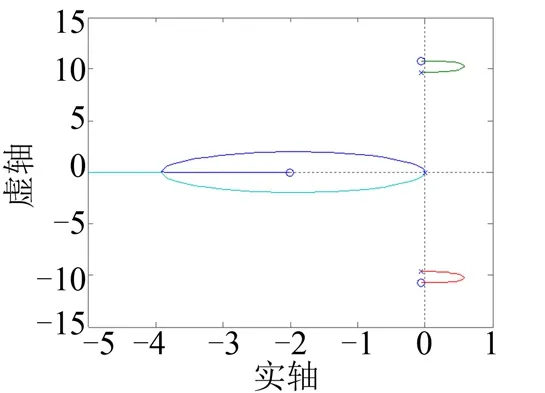
圖4 kγv 變化時的根軌跡曲線Fig.4 Root Locus with Variable kγv

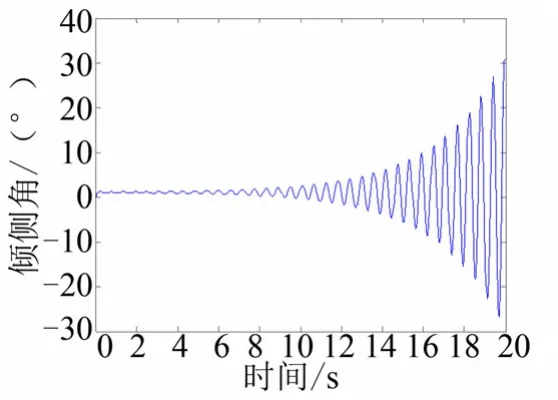
圖5 傾側角階躍信號響應曲線Fig.5 Step Response Curve of vγ #
增加滾轉舵偏對側滑角的反饋后,控制方程為
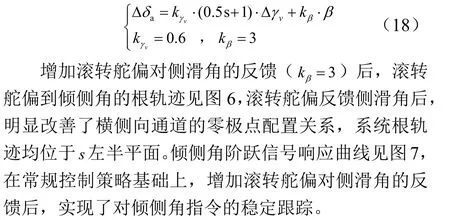
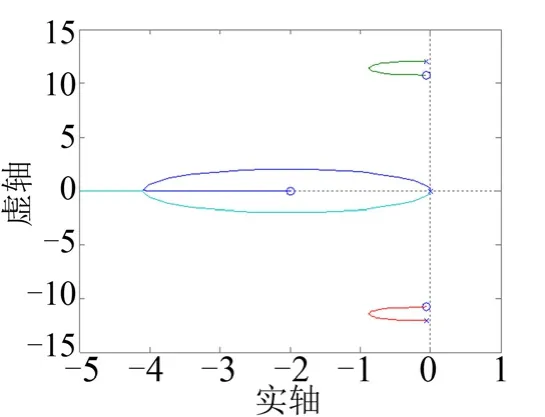
圖6 kβ = 3,變化時的根軌跡曲線Fig.6 Root Locus with Variable ,kβ =3
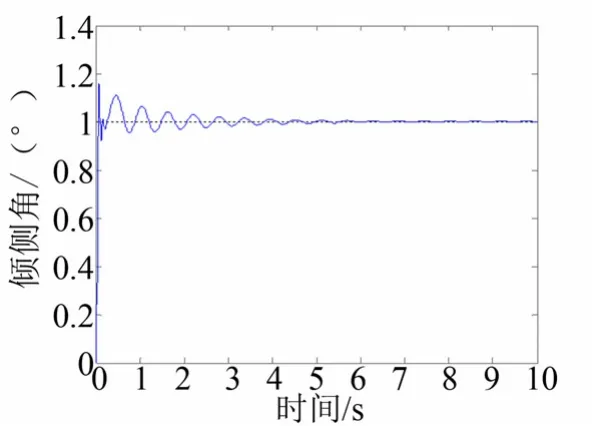
圖7 傾側角階躍信號響應曲線Fig.7 Step Response Curve of vγ
4 結束語
針對高速面對稱飛行器存在的橫側向耦合振蕩發散問題,從機理層面推導出耦合振蕩發散的原因,從而推導出橫側向零極點的位置關系是影響橫側向振蕩發散的主要原因,在不改變氣動外形且不使用方向舵的前提下,提出增加滾轉舵偏反饋側滑角的控制策略來抑制橫側向耦合振蕩發散,通過機理分析及仿真驗證,這種控制策略抑制橫側向耦合振蕩發散是有效的。