無人機數據鏈下行鏈路的時隙空分復用算法*
2022-08-23 01:53:06王昭
通信技術 2022年7期
王 昭
(中國電子科技集團公司第十研究所,四川 成都 610036)
0 引言
無人機數據鏈[1]是無人機系統的神經,作為連接無人機和地面控制站的紐帶,具有傳輸速率高、傳輸距離遠、系統容量大、抗干擾性強等特點,為無人機在軍事作戰領域的各種應用提供了有力的保障。在無人機數據鏈中,通常利用下行鏈路傳輸無人機平臺獲取的信息,借助通信網絡實現無人機向地面裝備分發信息資源[2]。
隨著蜂群等密集型無人機應用模式的開展,無人機數據鏈的組網規模急劇增長[3],從以往的幾架,擴充到幾十架甚至上百架,而傳統頻域、時域、碼域的研究非常成熟,性能已經接近理論極限,很難滿足大規模無人機組網的容量需求,因而需要使用新的方法來突破技術瓶頸。相較于傳統的多路復用和多址技術,空分復用(Space Division Multiplexing,SDM)在提高系統容量、提高系統頻譜使用效率、降低發射功率、減小用戶干擾等方面顯示了巨大的潛能,并逐漸成為無線通信技術領域研究的熱點[4]。
對于新型的一站多機無人機數據鏈[5],地面控制站配置多波束相控陣天線,根據期望信號的先驗知識,在期望信號的方向上適時地形成多個波束,分別持續跟蹤多架無人機的位置變動,并在每個時隙動態地改變波束的方向和形狀,從而避免了固定多波束技術中,用戶處于波束的邊緣時性能下降的問題。文獻[6]基于多波束通信系統思想,利用相控陣天線技術引入空間資源,提出了一種基于點波束指向逐包快速調整的空分復用技術。文獻[7]以均衡用戶排隊時延并最大化網絡總吞吐量為目標,提出了一種低復雜度的聯合時延均衡和功率控制的最優資源管理方法,并通過仿真證明該方法能夠大幅提升網絡性能。但針對無人機數據鏈的高動態集群用戶組網場景,如何實時動態調度下行鏈路的波束和時隙資源,控制每個無人機節點的實時輻射功率,提高時隙的空分復用度,并能兼顧各無人機的時延均衡性能,仍是急需解決的瓶頸問題。由于波束分配和功率控制在空間維度上存在強耦合性,而且時隙分配和功率控制在時間維度上相互影響,因此聯合波束分配、時隙分配與功率控制的資源管理算法通常具有很高的復雜度。
本文的研究目的是,在地面控制站采用的多波束相控陣天線的無人機數據鏈中,提出高效的時隙空分復用算法。首先,針對波束空分復用、波束數目限制與節點功率限制等多維約束條件,建模聯合波束分配、時隙分配和功率控制的隨機優化問題,最大化下行鏈路的總吞吐量;其次,考慮到目標函數在求解時間平均隨機優化的特征,基于李雅普諾夫優化方法,設計了一種低復雜度的聯合波束分配和功率控制的時隙空分復用算法(Beam Assignment and Power Control-Space division and Time Division Multiple Access,BAPC-STDMA),并利用該優化問題的非凸數學特征,通過理論推導獲得最優解在每個時隙的閉式表達式,從而大幅降低資源分配算法的復雜度;最后在典型場景配置下,仿真對比分析BAPC-STDMA 方法與其他方法的性能。
1 系統模型
本文研究無人機數據鏈網絡的無人機節點到地面控制站的下行鏈路[2]。地面控制站利用多波束天線以時分多址接入(Time Division Multiple Access,TDMA)的方式同時服務N個無人機節點,靈活調度多波束資源。接收數據時設置每個波束分別指向不同的無人機節點,從而允許在同一時隙內接收多個無人機節點的下行數據,提升網絡的下行整體吞吐能力。該系統的模型如圖1 所示。

圖1 系統模型
地面控制站在調度多波束資源并行接收多路下行數據時,必須要考慮各無人機節點在同個時隙同頻復用情況下的相互干擾。時隙資源空分復用分配應在保證地面控制站正常接收各路下行數據的情況下,合理安排每個無人機節點的發送時機與發射功率,盡量提升下行鏈路的空分復用度,從而提高網絡吞吐量。
1.1 輸入條件
無人機數據鏈下行鏈路的時隙資源空分調度問題是由時隙配置情況、無人機節點構成、各無人機的傳輸容量需求、各無人機的空間位置分布這4 個輸入條件確定。
1.1.1 時隙配置情況
設時隙長度為τ,時隙分配周期為Ts,則分配周期內任意時隙t可表示為t∈{1,2,3,…,Ts/τ}。
1.1.2 無人機節點構成
設N為參與數據鏈網絡的最大無人機節點數,則無人機節點集合U={1,2,…,N}。
1.1.3 各無人機節點的傳輸容量需求
網絡中各無人機均周期產生下行業務消息,只需要地面控制站接收,其余無人機無需接收。各無人機節點的傳輸容量需求用一維實數向量表示為M=[M1,M2,…,MN],其中Mu表示無人機u的容量需求,單位為bit/s。
1.1.4 各無人機的空間位置分布
各無人機相對地面控制站的空間位置分布,直接影響著下行鏈路的數據傳輸能力;距離的差異直接影響下行鏈路的路徑損耗;空間角度直接決定彼此在同一時隙復用時的相互干擾電平。用三維坐標(x,y,z)表示各節點的空間位置,由于考慮相對位置關系,不妨設地面控制站位于坐標原點(0,0,0),任意無人機節點u的空間位置用(xu,yu,zu)表示。
1.2 時隙空分復用分配表示
無人機數據鏈下行鏈路的時隙資源空分調度的輸出結果包含時隙分配向量、發射功率向量與波束分配向量,分別定義如下:
(1)X(t)=[Xu(t)]u∈U為時隙t的時隙分配向量,其中Xu(t)=1 表示節點u占用時隙t,而Xu(t)=0 表示節點u未占用時隙。
(2)P(t)=[Pu(t)]u∈U為時隙t的發射功率向量,其中Pu(t)表示節點u在時隙t的發射功率。
(3)B(t)=[Bu(t)]u∈U為時隙t的波束分配向量,其中Bu(t)表示地面控制站接收節點u數據時所采用的波束對應的編號。
1.3 假設和約束
根據無人機數據鏈的實際使用環境,在下行鏈路時隙空分復用分配中作如下約束或假設。
1.3.1 信道傳輸模型的假設
假定時隙t內各無人機節點u到地面控制站D的信道狀態為G(t)={gu,D(t)}u∈U,其中,gu,D(t)由無人機下行鏈路的信道損耗模型決定,本文主要考慮空間路徑損耗與多徑衰落等基本損耗。根據香農公式,可得到無人機節點u在時隙t的傳輸數據量為:
式中:w為信道帶寬;τ為時隙長度;σ2為高斯噪聲功率。
1.3.2 空分復用條件和最大波束數目的約束
一方面,要求到達地面控制站信號處理端的有用信號電平與任意一路干擾信號電平的差值必須大于門限值Gth,才能進行空分復用。另一方面,受限于地面控制站天線能力,同一時隙內分配的節點數目必須小于等于波束數目限制Bth。則空分復用條件和最大波束數目的約束可表示為:

式中:D(t)=[Gu,j,D(t)]u.j∈U為波束空分增益向量,Gu,j,D(t)為鏈路u→D與鏈路j→D之間的波束空分增益,該增益取決于多波束天線的主瓣增益與旁瓣抑制能力。
1.3.3 節點的功率限制
受限于無人機節點的設備能力,節點的瞬時發射功率不能超過其允許的最大發射功率Pu,max,平均發射功率不能超過門限值Pu,mean,即:

式中:E表示數學期望。
1.4 優化目標
為實現下行數據排隊時延的均衡性,每個無人機發送節點u維護一個緩存接入數據的隊列,并采用動態接納控制方法保證隊列不溢出。根據排隊理論可知,在有限排隊時延的條件下,數據隊列將趨于穩定狀態,從而在時間平均意義上,數據隊列的輸入數據量等于輸出數據量。因此,在隊列穩定狀態下,可將節點u的吞吐量定義為:

式中:Qu(t)為發送節點u在時隙t時的數據隊列長度;ru(t)為隊列接納控制后的入隊數據量;Ru(t)為節點u在當前時隙信道模型下的實際傳輸數據量。
根據上述對單個節點u的吞吐量分析,可以得到無人機數據鏈下行鏈路的時隙空分復用分配的優化目標為,在滿足波束空分復用條件、波束數目限制與節點功率限制等多維約束條件的基礎上,最大化網絡總吞吐量,即所有無人機節點的吞吐量之和,其表達式為:

式中:r(t)=[ru(t)]u∈U,P(t)和X(t)為隨機優化問題的控制變量。該優化目標是一個典型的多變量緊耦合的復雜優化問題,任意節點在任意時隙的傳輸數據量大小都受自身信道狀態與其他節點功率控制結果的影響。
2 聯合波束分配和功率控制的時隙空分復用算法
本節利用李雅普諾夫優化方法[8-9]在求解時間平均隨機優化問題上的優勢,根據網絡的瞬時狀態對每個時隙進行分配決策。利用李雅普諾夫優化方法,定義關于時間平均的功率約束的虛擬隊列Z(t),并依據李雅普諾夫優化定理[8],構造優化問題P1 的李雅普諾夫優化函數:

式中:S(t)=[Qu(t),Z(t)]為時隙t的隊列狀態信息。
可推導出優化問題P1 的李雅普諾夫優化函數的上界為:

式中:C為實際傳輸數據量、接入數據量、功率限制等多重因素決定的常量;V為接納控制過程中的隊列控制參數。
研究式(10)的構成,優化問題P1 的最大值等效于以下兩個優化問題P2 與P3 的最小值優化,即:
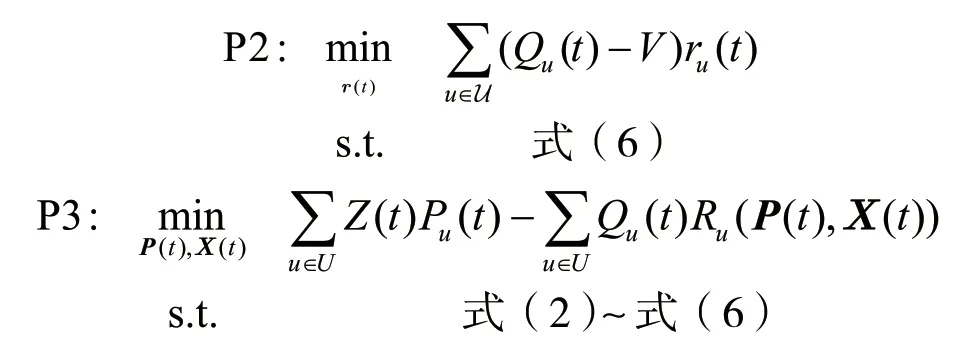
對于P2 問題的最小值優化,參考文獻[7],可以依據各用戶的數據隊列長度對當前到達的數據進行接納控制,并通過調整控制參數V來限制緩存隊列的最大容量,從而保障隊列的穩定性。
分析P3 問題的最小值優化,對于每個時隙t,聯合波束分配和功率控制的時隙空分復用分配是基于信道狀態信息G(t)、波束增益信息D(t)和隊列狀態信息S(t)到時隙分配向量X(t)和發射功率向量P(t)的映射關系。值得注意的是,P3 的目標函數為非凸函數,因為Ru(P(t),X(t))的信干噪比中,發射功率和時隙分配結果是緊密耦合的。為降低聯合時隙分配和功率控制的復雜度,本節點先在初始發射功率下執行時隙空分復用分配,并基于時隙空分復用分配結果,再進行優化功率控制。定義下行鏈路的無人機初始發送功率向量,其中,且qu是與發送節點u的隊列狀態信息相關的函數。從而求解基于初始發射功率的時隙空分復用分配向量問題,可等效簡化為優化問題P4。

本文采用循環迭代獲取最大化調度增益的時隙空分復用分配方法,來求解優化問題P4。定義調度增益ρi(t),用來表示當時隙t調度到無人機節點i時,優化問題P4 的目標函數對應的增值。首先,初始化發射功率向量P0(t)和時隙分配向量X(t)。其次,對于每個節點i,引入輔助向量X(i)(t)以復制當前的向量X(t),設置(t)=1,并計算節點i的調度增益。將向量X(i)(t)代入空分復用條件(式(2))和波束數目限制(式(3))中,如果空分復用條件(式(2))和波束數目限制(式(3))中任一條件不成立,則說明節點i不允許占用時隙t,將其調度增益設置為ρi(t)=-∞;否則,節點i允許占用時隙t,且節點i的調度增益為:

再次,完成各無人機節點的調度增益計算后,選擇具有最大正調度增益的節點i的輔助向量X(i)(t)作為當前迭代的輸出結果。
最后,當所有節點都沒有正調度增益時,結束時隙分配并輸出最終時隙分配向量X(t),并針對每個時隙按照占有該時隙的節點號由小到大依次分配波束號,保證共享同一個時隙的節點均分配到互不相同的波束。

在上述過程利用初始功率完成時隙分配與波束分配后,需要進一步對每個無人機節點的功率進行優化控制,以期獲得更佳的網絡吞吐能力。首先,將基于初始發射功率的計算結果時隙分配向量X(t)代入優化問題P3,并將其轉換為僅關于功率控制的優化問題P5。然而,功率控制中各節點發射功率與實際傳輸數據量的相互耦合關系使得目標函數仍為非凸函數,本文采用連續性凸優化[10]方法來獲得功率控制問題的局部最優解。

其中,目標函數的兩部分都符合凸函數特征,則有:


利用兩個凸函數相減的特征,本文采用持續凸優化的方法來計算其局部最優解。在選定發射功率向量P(t)的初始迭代值等于P0(t)后,依次按照以下計算步驟進行求解:
(1)在進行第k次迭代時,先對函數l(P(t))在點P(k)(t)上的梯度進行求解,其表達式為:
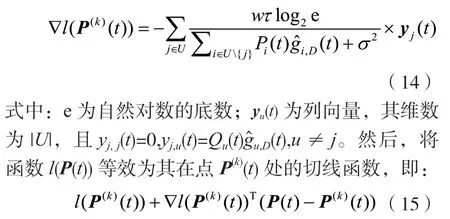
因此,本文將兩個凸函數相減簡化為一個凸函數與一個線性函數相減的結構,可將優化問題P5的目標函數下界作為凸近似問題進行處理。
(2)循環迭代求解近似后的凸優化問題,獲得一個更優的功率控制決策結果,并令P(k+1)將當前結果代入下一次迭代。
(3)令k=k+1,重復執行步驟(1)與步驟(2),進行循環迭代。當算法達到收斂狀態后,將最終的作為優化問題P5 的局部最優解進行輸出,從而獲得優化后的功率分配向量。
至此,本文針對系統模型構建的優化問題,通過對時隙空分復用分配的優化目標逐層分解并依次優化求解,最終得到下行吞吐量最大化的時隙分配向量、波束分配與功率控制向量的各種分配結果。
3 仿真結果與分析
本節通過MATLAB 仿真驗證本文提出的聯合波束分配和功率控制的時隙空分復用算法(BAPCSTDMA)在網絡吞吐量與接入時延上的性能。為對比算法性能,本文將所提算法與另外2 種方法進行對比,這2 種方法為:
(1)基于功率控制的時隙分配算法(Power Control -Time Division Multiple Access,PC-TDMA)。該方法的功率控制方法與BAPC-STDMA 相同,但是,該方法采用純TDMA 方式,未考慮空分復用,每個時隙僅允許單個無人機節點發送下行數據。
(2)聯合波束分配和恒定功率的時隙空分復用算法(Beam Assignment and Fixed Power -Space division and Time Division Multiple Access,BAFPSTDMA)。該方法的波束分配機制與BAPC-STDMA相同,但功率控制采用恒定功率的方式,無人機節點采用相同的功率發送下行數據。
3 種算法在典型場景上獨立運行10 000 次,每次運行使用不同的隨機種子產生在指定區域的無人機拓撲位置分布。開發環境為MATLAB?2015a,平臺環境為Windows 7 SP 1 操作系統,Intel?Core ?i5-6500@ 3.2 GHz 3.2 GHz 的CPU,以及8 GB的內存。
3.1 仿真配置
考慮1 個以地面控制站為中心,高度層為8 000 m、半徑為300 km 的圓錐形空域,2~200 架無人機隨機分布在高度為4~8 km 的區域內。信道基本參數設置參考外軍Link16 數據鏈[11],工作頻率為1 GHz,信道帶寬為3 MHz,每個時隙長度為7.812 5 ms。無人機的瞬時功率約束為100 W,平均功率約束為70 W,接收機噪聲系數為6 dB,每個無人機的平均業務量為50 kbit/s。信道采用萊斯信道模型,萊斯因子K=10。地面控制站采用多波束相控陣天線,單個波束方位面寬度為10°,俯仰面為30°,平均增益為20 dB。任意兩個波束之間的水平投影夾角大于25°時,波束空分增益為50 dB;否則,波束空分增益為0。空分條件約束Gth為20 dB,波束數目限制Bth=4,隊列控制參數V=400。在仿真中,針對每個不同無人機節點數目的場景配置,隨機生成10 000 次拓撲,在每個拓撲下獨立運行3 種算法,每次運行1 536 個時隙,對每種算法下的網絡性能進行統計平均。
3.2 仿真結果分析
圖2描述了無人機節點數目與網絡總吞吐量的關系。
如圖2 所示,在無人機節點數目較少時,網絡總吞吐量隨著無人機節點數目的增加而增加,這是由于輸入到整個網絡的業務量線性增加。當無人機節點數目超過140 時,3 種方法下的時隙利用率均達到極限值,導致網絡總吞吐量趨于飽和狀態。此外,對比PC-TDMA 方法,本文提出的BAPCSTDMA 方法充分利用了空分復用帶來的增益,成倍增加了網絡總吞吐量;對比BAFP-STDMA 方法,本文提出的BAPC-STDMA 方法利用功率控制對空分復用進行聯合優化,獲得了更高的空分復用增益,進一步提升了網絡總吞吐量,在同等條件下容納更多的無人機節點。
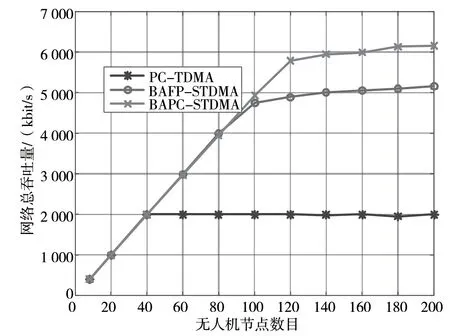
圖2 無人機節點數目與網絡總吞吐量的關系
圖3 描述了無人機節點數目與平均接入時延的關系。
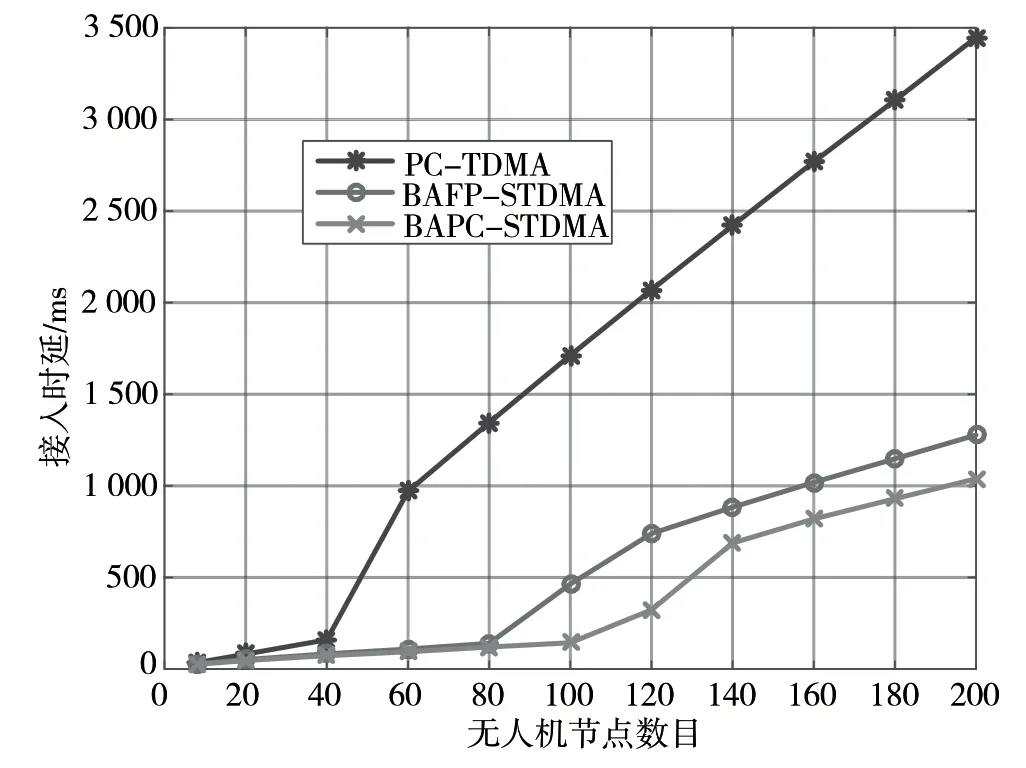
圖3 無人機節點數目與平均接入時延的關系
如圖3 所示,在無人機節點數目較少時,平均接入時延基本保持恒定,這是由于網絡輸入的業務量小于網絡吞吐能力,數據包在隊列中不會產生累積排隊時延。當無人機節點數目較多時,隨著網絡輸入業務量的逐漸增大,平均接入時延直線上升。此外,對比PC-TDMA 方法和BAFP-STDMA 方法,本文提出的BAPC-STDMA 方法在無人機節點數目較少時,接入時延性能改善不明顯,但在無人機節點數目增大后,接入時延性能得到明顯改善,不僅上升拐點大幅推后,上升斜率也有所下降。為滿足無人機數據鏈的接入時延要求,如不大于500 ms,PC-TDMA 最多容納50 個節點,BAFP-STDMA 最多容納100 個節點,而本文提出的BAPC-STDMA方法可容納130 個節點,有效提高了無人機數據鏈的組網規模。
圖4 給出了BAPC-STDMA 算法在無人機節點數配置為100 場景下的某一次運行得到的時隙復用分配結果,時隙分配周期為64 個時隙。

圖4 BAPC-STDMA 時隙復用分配結果
從分配結果可以看出,本文提出的BAPCSTDMA 方法支持將同一個時隙分配給多個無人機節點,圖中第38 號時隙同時分配給了節點21、49、57、66 共4 個節點,地面控制站分別采用波束1、2、3、4 對應接收節點21、49、57、66 的下行數據,大幅提升了時隙利用率。此外,各節點的時隙分配相對均勻,具有較好的時延均衡特性。
4 結語
在無人機數據鏈中,優化下行時隙分配對提高網絡性能非常重要。本文針對地面控制站配置多波束相控陣天線的無人機數據鏈網絡的下行鏈路,考慮信道衰落的隨機性、業務到達的動態性以及波束空分復用條件,提出了一種低復雜度的聯合波束分配和功率控制的時隙空分復用算法(BAPCSTDMA),以期最大化網絡總吞吐量,并滿足數據隊列穩定性與無人機節點的功率約束。仿真結果表明,本文提出的BAPC-STDMA 方法能夠顯著提升網絡總吞吐量并降低接入時延,容納更多的無人機節點,在無人機數據鏈的大規模密集組網上具有較強的工程應用價值,為其提供了一種高效的資源分配途徑。后續將考慮更復雜的多站多機組網場景,并引入更逼真的多波束天線與信道模型,對時隙空分復用算法開展進一步的研究。
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
