基于空間特征增強的車道線檢測算法*
2022-08-23 01:52:58向思佳
通信技術 2022年7期
向思佳,曾 凱
(昆明理工大學 信息工程與自動化學院,云南 昆明 650504)
0 引言
車道線檢測是計算機視覺的一項重要任務,同時也是自動駕駛和高級輔助系統(Advanced Driving Assistance System,ADAS)的關鍵任務[1]。作為一種重要的感知技術,車道線檢測可以定位道路上的可駕駛區域[2],為車輛的安全駕駛提供保障。然而由于自動駕駛場景的復雜性,極易出現車道線難以識別的情況,例如,如圖1(c)所示,車輛遮擋了車道線;如圖1(a)所示,路面問題導致車道線模糊。此外,車道本身具有細長特性,以及常常伴有混淆目標,比如圖1(b)中,道路兩旁有容易與車道線混淆的欄桿。以上這些復雜場景給車道線的精確檢測帶來了極大的挑戰[3]。車道線檢測逐漸成為國內外研究的熱點[4]。
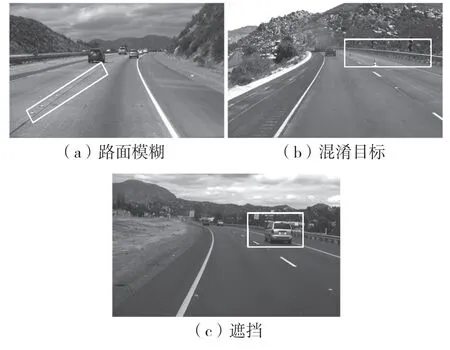
圖1 車道線檢測當前面臨的挑戰
目前車道線檢測算法主要分為基于傳統圖像處理以及基于深度學習的方法。大多數傳統的車道線檢測方法是利用各種手動設計的特征,如顏色和紋理,來提取淺層次的交通道路特征[5-6]。這些方法計算量小,無須進行重大調整以適應不同場景。然而,傳統圖像處理方式的性能取決于測試環境的條件,只能在場景簡單、車道線標記清晰的道路環境下取得較好的檢測性能[7]。
與傳統圖像處理方向相比,基于深度學習的方法在復雜場景中表現出更優異的性能。現有的基于深度學習的方法[8-9]利用卷積神經網絡(Convolutional Neural Networks,CNN)強大的表征能力來提高車道線檢測精度。早期的方法[10-11]通常先生成分割結果,然后采用后處理,如分段聚類和曲線擬合。這些方法效率低下,在進行車道線分割時忽略了全局上下文[2,12]。由于車道線固有的細長的形態結構,需要更加強大的高低層次特征融合,來同時獲取全局的空間結構關系[13]。同時車道線檢測常常伴有復雜環境因素,如光線變化,以及遮擋問題。因此,僅僅使用CNN 進行局部關系的建模無法精準檢測車道線。
文獻[11]使用軟注意力的方法生成一個空間加權圖來豐富上下文信息,但是僅僅使用注意力機制無法推斷細長結構的特性之間的依賴關系[14]。空間卷積神經網絡(Spatial CNN,SCNN)[12]旨在獲得更強的空間關系,將特征圖進行逐行切片以及逐列切片,并對每一個特征片進行卷積操作,使得相鄰的行列間能傳遞信息,但是這種方式不適合長距離行列信息的傳遞[15]。基于此,循環特征移位增強模塊(REcurrent Feature-Shift Aggregator,RESA)[3]增加了步長,以及迭代次數,然而信息仍然保持在行列間傳遞,缺少對不同像素間關系建模的考慮。由于自動駕駛場景的復雜性,細長的車道線較大型車輛較為稀疏,且尺寸差別較大,因此也需要考慮多尺度特征之間的關系建模[16]。
基于上述問題,本文構建了空間特征信息增強網絡(Spatial Feature Information Enhancement Network,SFE-Net),包含特征提取網絡、上下文感知模塊(Context Perception Module,CPM)、空間特征增強模塊(Spatial Feature Enhancement Module,SPEM)以及預測網絡。上下文感知模塊融合不同尺寸特征圖信息,同時增強對全局上下文信息關系的建模。空間特征增強模塊對特征的空間信息和通道信息進行增強,提高網絡模型的車道線特征表征能力及環境適應能力。
1 算法設計與實現
受SCNN 的啟發,本文提出了SFE-Net。SFENet 分別由特征提取網絡、CPM、SPEM 以及預測網絡組成。SFE-Net 的框架結構如圖2 所示,其中圖中的SE 為壓縮激發模塊(Squeeze-and-Excitation)。
1.1 特征提取網絡
如圖2 所示,本文使用ResNet34 作為特征提取網絡進行圖像特征的提取。經過ResNet34 提取的特征圖尺寸為原圖像尺寸的1/8。為了進行多尺度空間上下文特征的感知,本文選擇ResNet34 的第2、第3 和第4 層特征作為輸出。
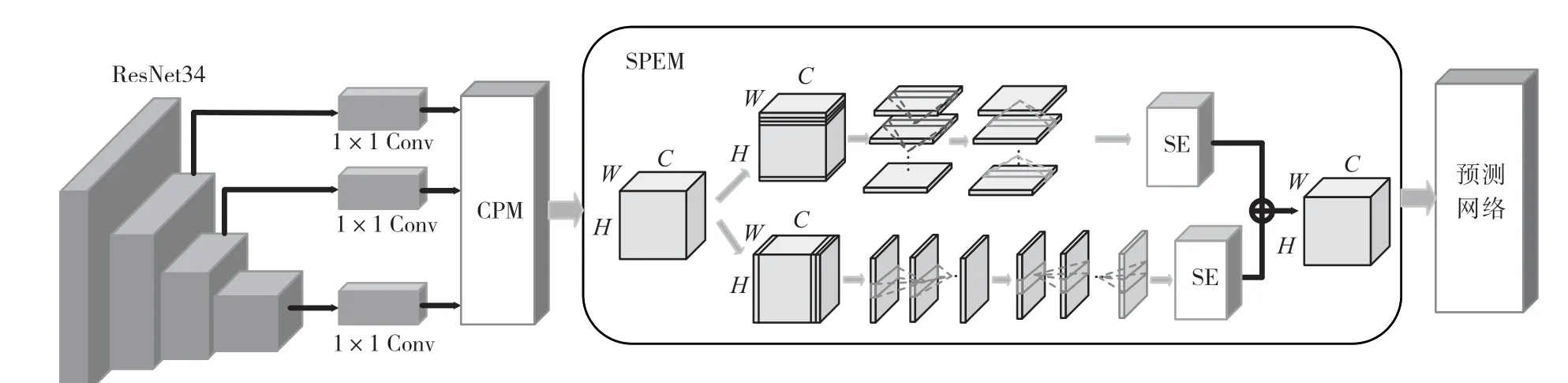
圖2 SFE-Net 框架結構
1.2 CPM
由于卷積神經網絡只能提取到特征的局部信息,缺少對全局信息以及上下文語義的考慮。而車道線在圖片上呈現出連續細長的條狀,神經網絡進行局部信息建模時容易將道路兩旁的欄桿或其他結構形狀相似的障礙物識別成車道線。此外,車道線與大型車輛相比較為稀疏,且容易被車輛遮擋,因此只考慮局部關系的建模無法精準檢測車道線。基于上述問題,本文提出了CPM,從而增強網絡對于全局上下文信息以及局部信息的聯合學習。如圖3 所示,CPM 的輸入是經過特征提取網絡后的3層特征。
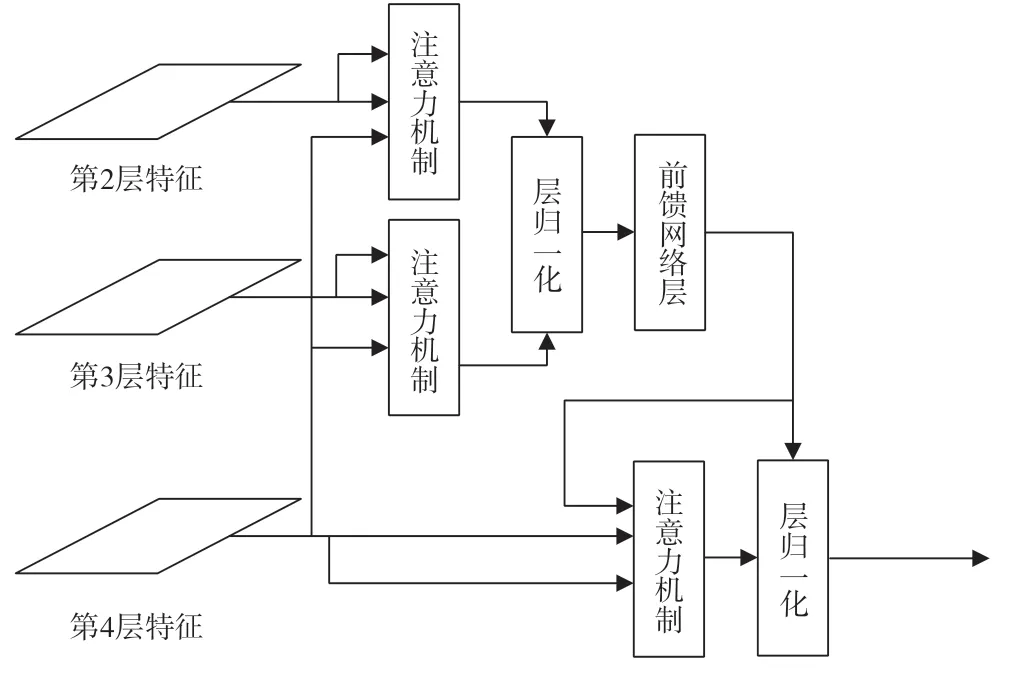
圖3 CPM 的框架結構
CPM 的計算流程可表示為:

式中:X1,X2,X3為上下文感知模塊的輸入;y為經過X1,X2兩層特征進行多尺度融合后的特征圖;y′為經過上下文感知模塊增強后的特征圖;FFN為前饋網絡層;LN為層歸一化模塊;Att為注意力機制模塊。
1.3 SPEM
SPEM 將特征圖X∈RC,H,W分別按照H維度和W維度進行切片操作,如圖2 所示。其中,C,H,W分別代表特征圖的通道數、行數和列數。按照H維度切分后的特征分別經過垂直方向(由上到下以及由下到上)進行兩次特征聚合,其表達式為:

式中:Km,c,n為一維卷積核;Xm,i+n-1,j為特征圖;m,i+n-1 和j分別為通道、行和列的索引;為經過聚合后的特征。
按照W切分后的特征分別在水平方向(由左到右以及由右到左)進行兩次聚合,其表達式為:
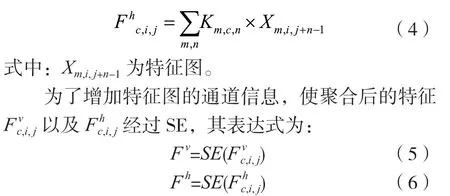
式中:SE(·)為通道注意力;F v以及Fh為壓縮激發模塊輸出的特征。
在經過SE 后進行元素相加,特征的空間和通道信息都得到了增強,這一過程,可表示為:

式中:Xc,i,j為CPM 輸出的特征圖;c,i,j分別為代表通道、行和列的索引;ReLU(·)為非線性激活函數;為經過SPEM 更新后的特征圖。通道注意力對每個通道上的權重進行了顯式建模,然后對原特征圖進行加權,突出每個通道的重要程度。
1.4 預測網絡
本文預測網絡采用RESA 的雙邊上采樣模塊,如圖4 所示。每個采樣塊向上采樣兩次,最后將特征圖恢復到原始大小。雙側上采樣模塊由粗粒度分支和細粒度分支組成。使用粗粒度分支來恢復粗粒度特征,使用細粒度分支來調整細粒度損失。通過上采樣,輸出的特征圖經過全連接來檢測每個車道線是否存在以及存在的概率,并進行分類操作。
圖4 中的殘差塊由4 個3×1 和4 個1×3 卷積,以及批標準化層(BN)和激活函數ReLU 組成。殘差塊可以保持特征圖的形狀,并有效地提取特征信息。
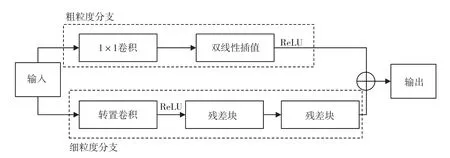
圖4 預測網絡結構
2 實驗討論
本文在當前廣泛運用的Tusimple 數據集上進行了實驗驗證。Tusimple 數據集共有6 408 張圖片,包括3 626 張訓練圖片以及2 782 張測試圖片,每張圖片的分辨率為1 280×720。在Tusimple 數據集上實驗,使用的評價指標是精確度(accuracy),其定義為:
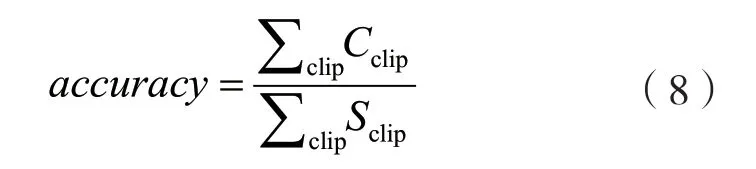
式中:Cclip為正確預測的車道點數;Sclip為每個視頻片段中標簽點的總數。同時,還評估了預測結果的假陽性率FP和假陰性率FN。
本實驗將原始圖片的大小調整為368×640。使用隨機梯度下降(Stochastic Gradient Descent,SGD)[17]作為優化器來訓練本實驗的模型,其中動量為0.9,權重衰減為0.000 1。在此基礎上,設置實驗的學習率為0.02,共訓練300 個批次,batchsize 設置為4。
本實驗的實驗環境為Ubuntu16.04 操作系統,CPU 為Intel(R) Xeon(R) Gold 5120 CPU @ 2.20 GHz,GPU 為NVIDIA Tesla V100,深度學習框架采用Pytorch1.5。
2.1 對比實驗
為了驗證本文提出的SFE-Net 的有效性,本實驗與當前幾種最先進的車道線檢測方法進行對 比,包 括ENet[18]、PolyLanNet[19]、LaneNet[20]、FastDraw[10]、LSTR[14]。結果如表1 所示,實驗檢測評估指標為精確度(accuracy)、假陽性率(FP)和假陰性率(FN)。實驗結果表明,SFE-Net 達到了96.42%的準確率,優于當前其他算法。
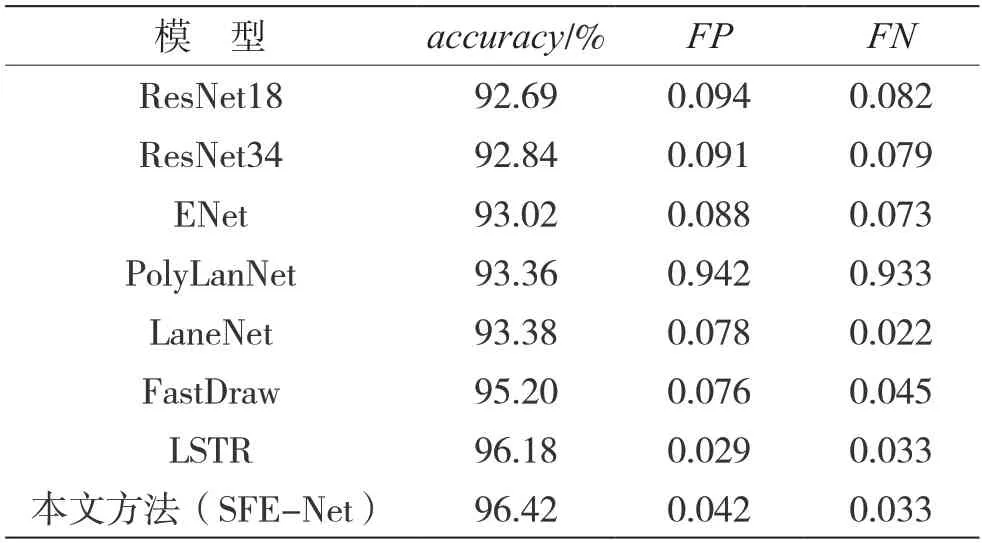
表1 不同方法對比實驗結果
2.2 消融實驗
本文在第1 節算法實現中,詳細描述了CPM以及SPEM 的框架結構,分析了方法實現的理論依據。為了驗證每個部分的重要性,本節進行了消融實驗,實驗結果如表2所示。其中基線網絡(Baseline)由ResNet34 以及預測網絡組成。
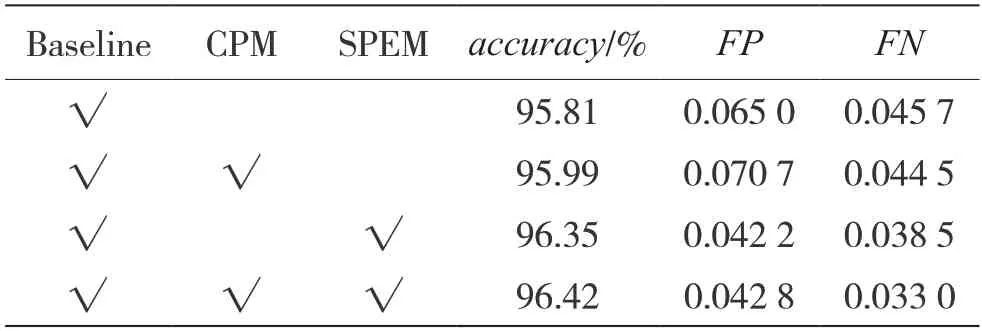
表2 在基礎網絡ResNet34 上進行消融實驗
經實驗檢驗,本文提出的CPM 以及SPEM 對車道線檢測的精度有一定的提升。同時也證明了,上下文信息以及多尺度信息對于細長目標的檢測有一定的影響。此外,空間信息聯合通道信息的增強有助于捕獲特征間的關系,利于車道線檢測精度的提升。為了更直觀地展示本文提出方法的可靠性,在Tusimple 數據集上進行實驗,SFE-Net 的檢測效果如圖5 所示。對于遮擋類目標以及磨損目標,均能有效檢測,而且在光照不佳的情況下,SFE-Net也能達到良好的檢測效果。
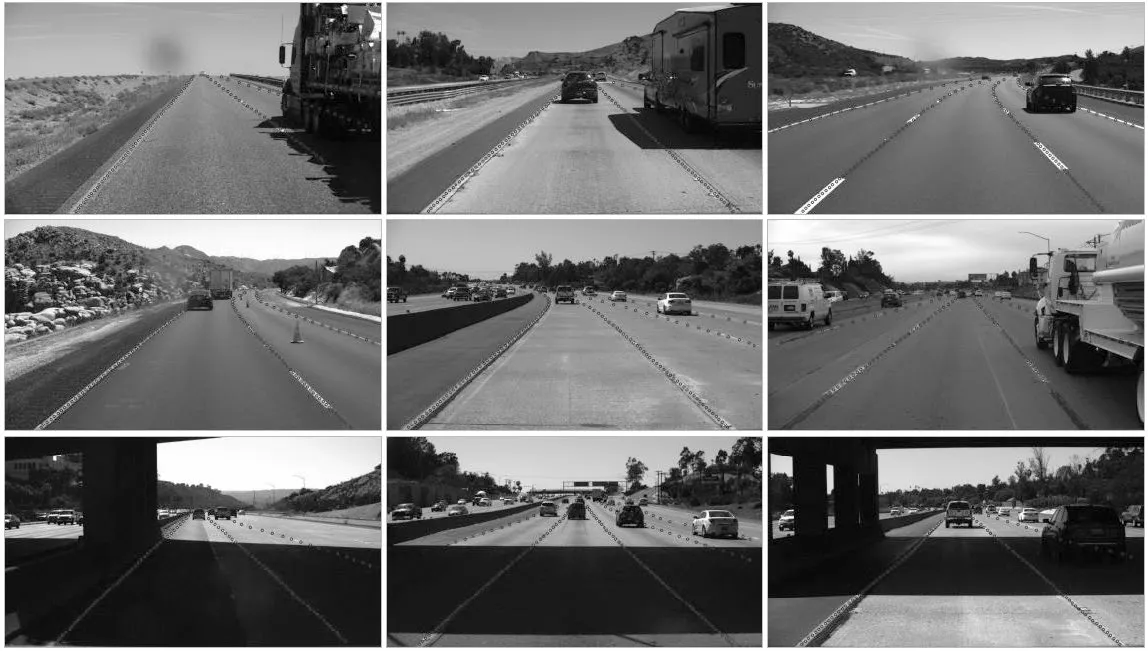
圖5 Tusimple 數據集使用檢測效果
3 結語
為了在復雜環境下進行車道線檢測,本文構建了SFE-Net。該網絡中的CPM,能有效捕捉跨尺度信息,并結合上下文環境信息進行感知,SPEM 能有效捕獲跨行和跨列的空間關系。同時使用通道注意力對每個通道上的權重進行顯式建模,突出每個通道的重要程度。通過在當前經典車道線檢測數據集上進行驗證評估可知,增強全局上下文信息在車道線檢測任務中十分關鍵,并且本文提出的方法具有較好的檢測性能。本文可以為無人駕駛環境感知、車道線偏離預警技術的研究和開發提供思路,促進智能交通領域的發展。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
