基于雙目視覺的測距系統研究
2022-08-20 08:33:28王浩張善房朱建高張鳳生
家電科技 2022年4期
王浩 張善房 朱建高 張鳳生
1. 海信家電集團股份有限公司 山東青島 266000;
2. 青島大學 山東青島 266000
0 引言
目前非接觸式測距方法中,利用超聲波、紅外、激光等進行測量的方式較為普遍,超聲波方式成本高、精度較低,紅外方式測量范圍小,激光方式測量精度高、成本高[1][2]。隨著圖像技術的發展,雙目視覺測距法展現出速度快、柔性好等優點,具有較大潛力。同時,以雙目視覺測距為基礎,通過調整測量系統的參數,可以實現測量范圍的改變,通過改變不同的圖像處理算法實現不同的功能,同時搭載不同的語言控制系統,可將雙目視覺技術應用到機械臂、智慧家居、智能制造等領域,前景廣闊[3]。
基于視差原理分析[4]、相機成像模型分析,設計雙目測距系統,并推導測距算法及計算公式。進一步對相機畸變模型、相機標定、圖像處理及圖像特征點匹配方法進行研究,最終將理論應用到實際,根據設計原理,基于兩個CCD相機搭建雙目視覺測距系統實體[5],對測距系統實體采用張正友標定法進行相機標定[6][7],并進一步對系統進行標定,得到系統的固有參數。基于系統固有參數,通過設計的系統采集被測對象的圖片,并對左右相機采集的對應圖片進行圖像處理及特征匹配,得到被測對象相對相機的位置,最終實現測距[8][9]目的。
1 雙目視覺測距原理
圖1所示為雙目視覺測距原理圖。C1、C2為兩個標稱參數一致的CCD相機,f1、f2分別為左、右相機鏡頭焦距,α1、α2分別為左、右相機光軸傾角,理論上應有f1=f2、α1=α2。2L為左右相機像平面中心之間的距離。為測量被測對象位置,需建立如下坐標系:(1)測量系統坐標系xoz:原點為兩相機像平面中心o1o2連線的中心,o1o2連線為x軸,方向o1指向o2為正;z軸垂直于o1o2連線,向上為正;(2)相機坐標系:分別以兩個CCD相機像平面中心o1和o2為原點在兩個CCD上建立x1o1z1和x2o2z2坐標系[10]。

圖1 雙目視覺測距系統示意圖
設點P為待測點位置,其在xoz坐標系中的坐標為(x,z);在兩相機各自成像平面上的坐標為P’(x1,0)和P’’(x2,0)。由幾何光學成像原理得出:

可見,P點坐標(x,z)取決于x1、x2、f1、f2、α1、α2和L這7個參數,任一值的誤差均會影響測量結果。
x1、x2是通過實際測量得出,但相機采集的圖像會存在畸變,影響測量精度,需要通過相機標定得到相機本身畸變系數后進行圖像畸變矯正,提高測量精度;其余5個參數為系統本身固定參數,但由于固定參數的理論值與實際值難以完全一致,需要對系統進行標定,得到系統固定參數的實際值,減小測量誤差,提高測量精度。
2 圖像匹配
圖像匹配可以建立左右相機采集到的兩圖像之間位置對應關系,進一步便可得到視差。圖像匹配主要有三種方式:相位匹配、灰度匹配、特征匹配。
相位匹配是基于對應點相位相等,利用空間域平移與頻率域相位平移的對應關系進行匹配,但會存在相位卷繞及相位奇點的問題,此方法主要處理帶通濾波信號的相位信息;灰度匹配受圖像灰度信息影響較大,抗造性差、誤差大;特征匹配利用圖像上的點、線等特征信息,不直接依賴灰度信息,具有魯棒性好、速度快、精度高的優點,因此本文采用特征匹配的方式進行圖像匹配[10]。
常用的特征點有Harris角點、FAST特征點、SURF特征點。SURF特征點檢測精度和穩定性高于Harris角點和FAST特征點,但速度慢于FAST特征點檢測,效率問題通過計算機設備可以得到保障,故最終選擇SURF特征點檢測[10]。
基于SURF特征點的圖像匹配主要有兩種:BruteForceMatcher(暴力匹配法)、FlannBasedMatcher(快速最近鄰逼近搜索法)。BruteForceMatcher法精度高、效率低,通過目前計算機設備可以彌補效率低的缺點,因此選擇BruteForceMatcher法進行SURF特征匹配。但是在匹配過程中,由于環境因素影響,往往會存在一些誤匹配現象,干擾因素越多,匹配情況越差,如圖2 a)所示。因此需要采取去除誤匹配措施。
目前主要有兩種去除SURF特征點誤匹配方法:基于RANSAC法特征匹配、基于極線約束法特征匹配。基于RANSAC法特征匹配利用迭代比對方式求解最優模型,該方式精度高,但匹配對數量少,如圖2 b)所示,并且一定情況下還會出現匹配不成功的情況。基于極線約束法特征匹配,其原理為:右成像平面上一點在左成像平面的對應匹配點必定位于左成像平面的極線上。此方法將求解范圍由二維降低至一維,提高了效率,匹配對數量多,但仍然有較少誤匹配點對,如圖2 c)所示。本文提出首先通過基于極線約束法進行一次匹配,去除絕大部分雜點、誤匹配點,后在此基礎上進行基于RANSAC法的特征匹配,由于首先進行了一次基于極線約束法的特征匹配,為后續RANSAC法的特征匹配提供了一個干擾小、雜點少的環境,最終結果表現為匹配精度高、匹配點多的良好效果,如圖2 d)所示。

圖2 不同SURF特征匹配方法效果對比圖
3 雙目視覺測距系統搭建及標定
根據雙目測距系統原理,搭建雙目測距平臺,如圖3所示。相機型號為FC-IU320C-6,像元大小3.2 μm×3.2 μm,分辨率為2048×1536,焦距f=25 mm,設置兩個相機各自的光軸傾角6.703°。底座為自制槽鋼,尺寸為100 mm×48 mm×5.3 mm,槽鋼兩端裝配有兩個可調節云臺,通過調節云臺,設定系統參數2L為1375 mm。自制8×6格數的棋盤格,每格大小為80 mm×80 mm。

圖3 雙目測距系統組成裝置圖
采集19對不同方位下棋盤格標定板的圖像進行雙目測距系統標定,標定程序為基于Visual Studio 2015,利用C++語言自主設計開發,標定程序界面及標定結果如圖4所示。

圖4 相機標定程序界面
根據標定結果計算得f1=7913.234×3.2×10-3≈25.3223 mm,f2=7921.116×3.2×10-3≈25.3476 mm,畸變系數不為零,說明存在畸變,需要矯正畸變。一般平均重投影誤差小于0.2個像素即可認為標定結果良好,兩相機該值均小于0.2,說明相機標定結果良好[10]。
根據雙目標定結果可求解左相機光軸傾角α1=6.8399°,兩相機主點距離為2L=1374.07 mm,右相機光軸傾角α2=6.8228°,此結果與實驗前設定的兩個相機各自的光軸傾角6.703°和兩相機主點距離1375 mm非常接近,同時得到的重投影誤差小于0.2,說明雙目標定結果良好[10][11]。
4 雙目測距實驗及結果評價
基于標定結果進行測距系統的測距實驗,選取一段管路(沒有棱角、特較不明顯、對系統檢測能力要求更高)作為被測對象進行測量實驗,如圖5所示。管路固定于工作臺,可實現調整x(代表左右方向,下同)、z(代表前后方向,下同)方向的位移,調整精度為0.01 mm。

圖5 測量實驗場景圖
在有效測量范圍內選取了9個待測點,如圖6所示。基于xoz坐標系,待測點1~9右側與下方數值為待測點位置設定值,通過德國BOSCH公司激光測距儀設定,測距儀型號為DLE40,精度1 mm(注:理論上設定值也會存在一定誤差,限于實驗條件,未考慮該誤差)。待測點基本涵蓋有效測量范圍區域。在這9個待測點處均以如下方式進行圖像采集:以待測點為中心,沿z軸方向前、后各移動10次,每次移動1 mm且采集一對圖像;同理以待測點為中心沿x軸向左、右方向各移動6次進行圖像采集。
按照上述移動方式,下面以待測點5為例,對測量過程進行說明:
由圖6知,待測點5位置為(5693, -22),單位:mm,負號表示待測點5位于x軸負半軸。

圖6 待測點位置關系圖
(1)圖像預處理
首先對采集的圖像進行降噪,后進行圖像畸變矯正。
(2)圖像匹配
將兩幅對應圖像通過RANSAC法與極線約束法結合的方式進行SURF特征匹配:首先在左圖選取ROI,其左上邊角坐標為(911, 308),此為起始坐標。以一對匹配點為例:
首先求解匹配點對像素坐標。左匹配點在ROI圖上坐標為(87.274, 114.004),由上可知該點的起始坐標為(911, 308),因此該點的實際坐標為兩坐標相加為(998.274, 422.004);右匹配點可直接得出坐標為(984.347, 424.048)。
已知像素坐標,進一步求解物理坐標x1、x2。由于物理坐標位于相機像平面的中點,故由相機標定結果得知左相機物理坐標原點為(1023.970, 767.932),右相機物理坐標系原點為(1023.988, 768.124),因此,計算x1為:

同理,計算x2為:

將所有參數帶入公式(1)可得x為-22.86639 mm,z為5693.77632 mm,十分接近設定值(5693,-22)。以此方式按照在待測點5處前后、左右移動的方案進行測量,由實驗結果得到,待測點5所處區域,z最大測量誤差為3.091 mm,x最大測量誤差為0.962 mm。同理,按照同樣方式在其余待測點位置區域進行實驗,得到所有待測點所處區域對于z值和x值的最大測量誤差,如表1所示。進一步,將前后方向和左右方向的最大測量誤差繪制成如圖7所示誤差圖,可直觀反映前后方向和左右方向的測量精度情況。
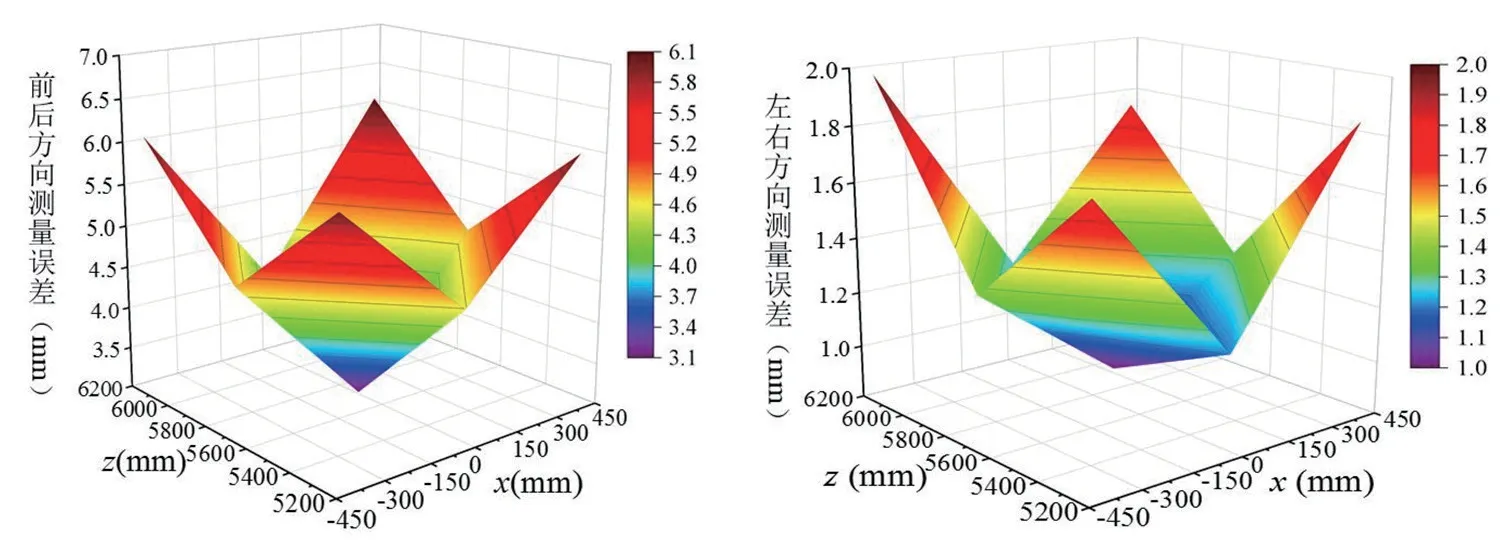
圖7 各個位置z、x最大測量誤差圖
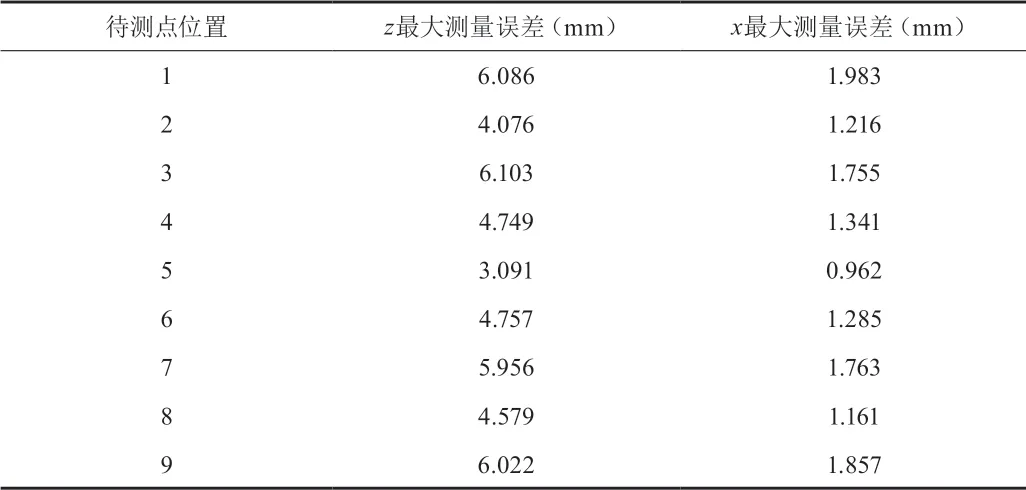
表1 各待測點位置測量實驗的最大測量誤差
根據實驗結果,有如下結論:
(1)在有效測量區域內,雙目測距系統對前后方向z的測量誤差為±6.103 mm,左右方向x的測量誤差為±1.983 mm。
(2)在有效測量區域內,邊角處測量誤差最大(即待測點1、3、7、9所處區域),中心位置區域測量誤差最小(即待測點5所處區域),中心位置區域z測量誤差為±3.091 mm,x測量誤差為±0.962 mm。
(3)在測量分辨力方面,系統對左右方向x的測量能力優于對前后方向z的測量能力。
5 結論
通過研究雙目測距原理,設計了雙目測距系統,以Visual Studio 2015為開發平臺,基于C++語言、OpenCV3.2.0函數庫編制測距系統程序,進行圖像采集、相機標定、圖像處理、圖像匹配,最后進行實驗驗證。實驗結果表明,雙目測距系統具有良好的精度和可行性,下一步將繼續深入研究、分析、完善此雙目測距系統的測量精度及可靠性,開展雙目系統應用到相關智能制造設備和智能化場景的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
家庭影院技術(2017年9期)2017-09-26 03:41:45
