檢測電極變形對MEMS陀螺儀振動性能的影響
2022-08-18 14:33:52徐淑靜盧新艷
傳感技術學報 2022年6期
徐淑靜,盧新艷
(中國電子科技集團公司第十三研究所,河北 石家莊 050051)
采用MEMS加工技術制作的陀螺儀具有體積小、成本低、可批量制作等優點,在民用領域和軍事領域都獲得了廣泛的應用。近年來,隨著MEMS技術的發展,MEMS陀螺儀的精度也不斷提升,由早期的100°/h[1]到目前的1°/h以內[2],應用領域也從消費、汽車、工業領域擴展到航空航天和軍事領域[3]。
MEMS陀螺儀有多種不同檢測原理和實現形式[4-5],其中音叉式振動陀螺儀在精度、溫度性能以及電路集成等方面具有顯著優勢,且加工技術最為成熟,是目前MEMS陀螺儀普遍采用的技術途徑。MEMS音叉式陀螺儀基于Coriolis效應,將結構的振動和外界角速率轉化為正交方向的哥氏加速度,通過檢測哥氏加速度產生的位移獲得外界角速率的值。由于MEMS音叉式陀螺儀的檢測部分工作原理與加速度計類似,當陀螺儀工作在振動環境中時,很容易受到干擾而產生誤差信號[6-9]。因此,抗振動性能的優劣是衡量MEMS陀螺儀能否用于高端應用領域的一項重要指標。
Sang Won Yoon等[10]對三種不同MEMS音叉式陀螺儀的振動特性進行了研究,提出陀螺儀的振動誤差信號主要是由電容檢測的非線性效應引起的;為了抵抗外界振動干擾,Bosch公司將MEMS陀螺儀的工作頻率提升至100kHz[11],雖然抗振動性能大幅提升,但檢測靈敏度降低,交叉耦合變大,需要進一步優化來提升性能;付楚琪等[12]采用動態誤差補償的方法提升MEMS陀螺儀在振動環境中的性能;為了解決MEMS陀螺儀不能滿足振動環境要求的問題,有些MEMS組件采用增加減振的措施來提升產品的振動環境性能,如Honeywell公司的HG1930和Sensornor公司的STIM300等。
MEMS陀螺儀工作時一直處于諧振運動狀態,檢測電極在諧振運動的帶動下在檢測運動方向會產生微小的變形。本文針對檢測電極的特性開展研究,分析了振動環境中陀螺儀的位移響應與檢測電極變形共同作用對振動性能產生影響的機理。通過對檢測電極的變形進行抑制設計和相位優化,有效降低了振動中的誤差信號,提升了MEMS陀螺儀的振動環境適應性。
1 MEMS音叉式陀螺儀的工作原理
MEMS音叉式陀螺儀采用兩個質量來抵消外界振動引起的干擾信號,如圖1所示。陀螺儀工作時,兩個質量處于諧振狀態,振動幅度相同,相位相反。當外界輸入信號為轉動時,受Coriolis加速度作用,兩個檢測質量在檢測方向(y向)的響應相位也相反;而當外界輸入信號為線振動時,兩個檢測質量的運動相位相同。通過對兩個檢測質量位移進行差分,線振動產生的位移響應被消除,只保留轉動信號的響應。
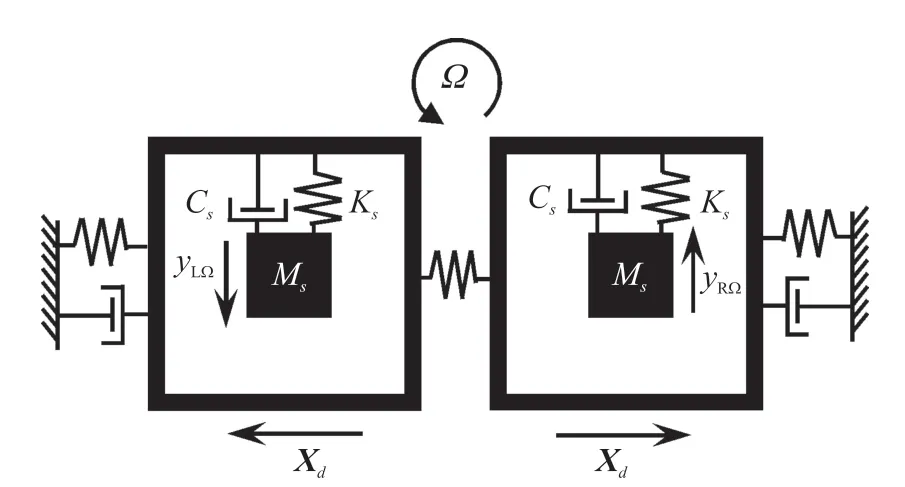
圖1 MEMS音叉式陀螺儀工作原理
假設陀螺結構的驅動位移為:

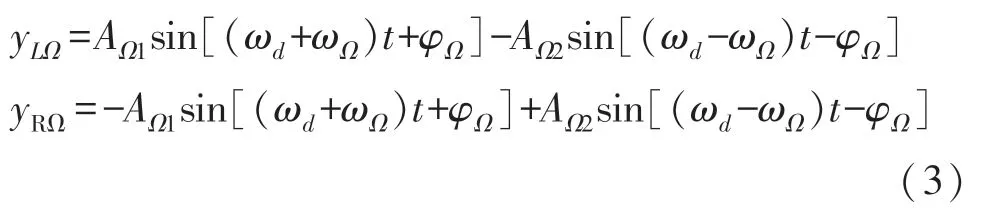
式中:X0為MEMS結構的驅動幅度,ωd為驅動的角頻率。當有角速率Ω=Ω0sin(ωΩt+φΩ)作用時,左右檢測質量的運動方程分別為

本文暫不考慮工藝問題引起的加工不對稱等因素[13],因此左右檢測質量的參數完全相同,Ms、Cs、Ks分別為檢測結構的質量、阻尼和剛度,yLΩ和yRΩ分別為左右檢測質量在Coriolis加速度作用下產生的位移。將式(1)代入式(2)得到檢測質量在角速率Ω作用下的位移為:
檢測電極在y方向的位移會引起檢測電容的變化,電路通過檢測電容的變化量得到輸入角速率Ω的大小。MEMS陀螺儀電容差分檢測方式如圖2所示,則角速率Ω產生的電容變化量為:
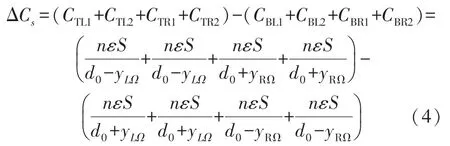
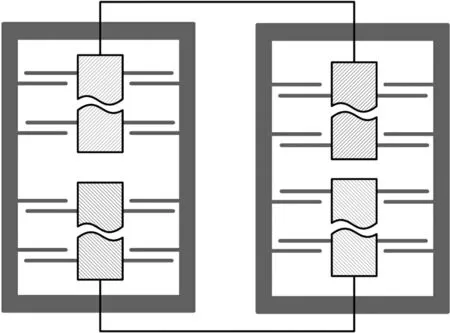
圖2 電容差分檢測示意圖
將式(3)代入式(4)得到
式中:ε為空氣的介電常數,n為一側電極的數目,S為電極的正對面積,d0為電極的間隙。由式(5)可以看出,角速率響應信號包含兩部分,對應的頻率成分為角速率被陀螺儀驅動運動調制后的頻率。
2 振動環境MEMS陀螺儀的誤差模型
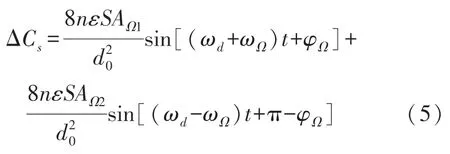
圖3為一典型MEMS音叉式陀螺儀的結構示意圖。當檢測質量和檢測電極隨驅動質量一起運動時,理想情況下,檢測質量和檢測電極被認為是剛性的,其運動位移即驅動質量的位移。但由于檢測質量和檢測電極本身不完全是剛性的,導致二者在驅動位移之外產生額外的變形。圖4為MEMS敏感結構在驅動力作用下的位移響應,由圖4(a)可以看出,檢測質量和檢測電極與驅動質量在x方向的位移幾乎相等,都為10.28μm。圖4(b)放大顯示了檢測質量的y向變形,可以看到,檢測質量和檢測電極除了x向的驅動位移外,都產生了y向變形,且不同位置的檢測電極的變形幅度和方向也不完全相同,最大的幅度可以達到0.196μm,和驅動位移的比值為0.019。
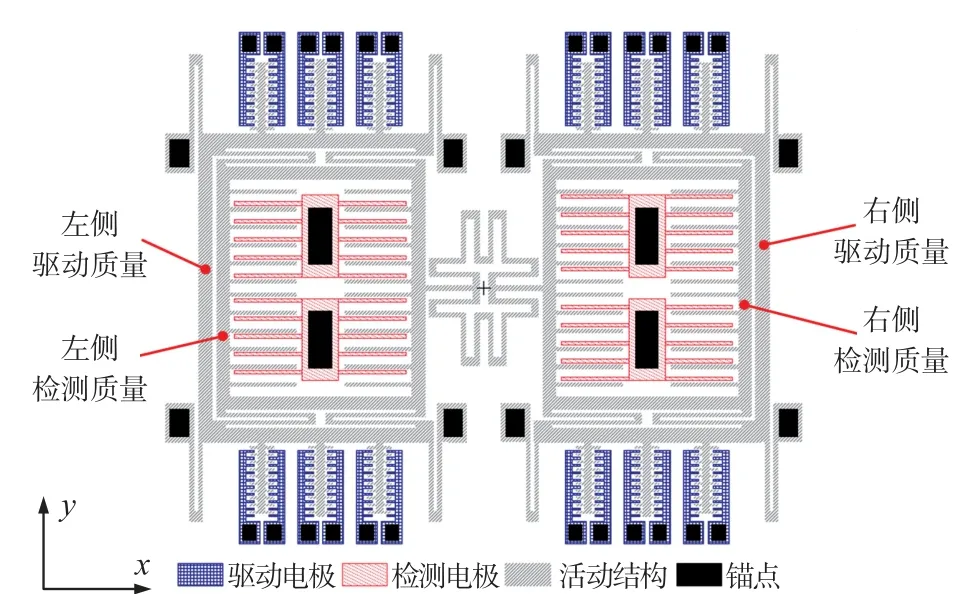
圖3 MEMS音叉式陀螺儀結構示意圖
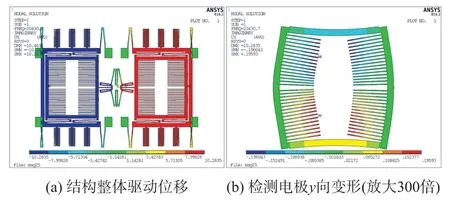
圖4 MEMS陀螺儀驅動位移仿真結果
為了分析該變形對陀螺儀振動性能的影響,我們將電極的變形進行等效。不考慮加工不對稱問題,則左右檢測質量完全對稱,單個檢測質量的上下也完全對稱,因此變形的差異主要體現在和檢測質量框架相連的內外兩側梳齒上,即圖2中的CTL1和CTL2,CBL1和CBL2,CTR1和CTR2,CBR1和CBR2。我們將左右兩側梳齒的變形分別等效為ym和yn,如圖5所示,由于該變形是由驅動運動引起的,因此二者的頻率與驅動頻率完全一致,定義二者的等效變形幅度分別為M和N,則該變形可以表示為:
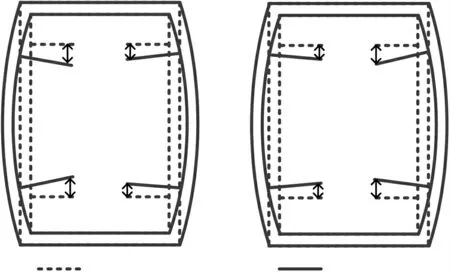
圖5 檢測電極變形示意圖
下面我們建立和ym、yn相關的線振動動力學模型。假設外界線振動信號為a,且

a0、ωa、φa分別為線振動信號的幅度、頻率和相位。則兩個檢測質量的運動方程均為:

式中:y a為檢測質量在加速度a作用下產生的位移,求解方程(8)得到

由以上分析可知,振動環境中檢測電極在檢測方向y向的位移包含兩部分,一部分為檢測質量在線振動作用下產生的位移y a,另一部分為驅動運動引起的檢測電極自身變形y m和y n。按照圖2所示的電容差分方式,計算二者共同產生的電容誤差信號為:
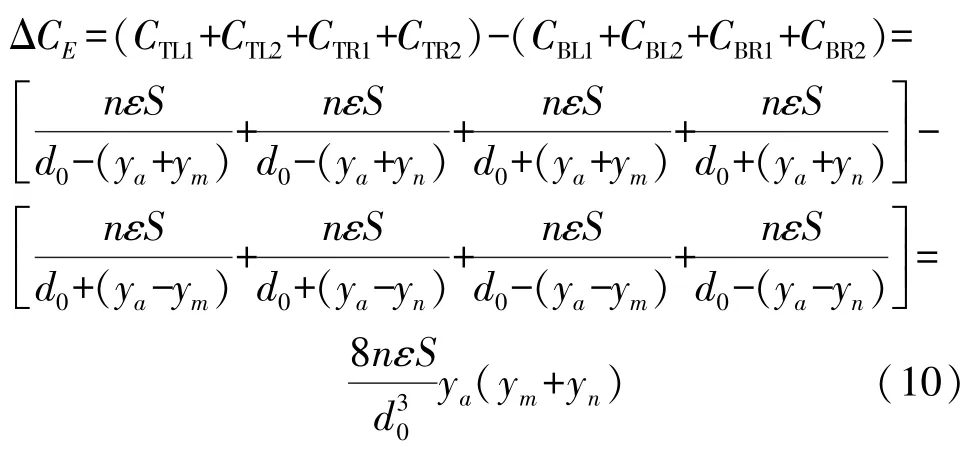
將式(6)和式(9)代入式(10),得到電容誤差為:

表1給出了角速率產生的電容信號(5)和振動作用下的誤差信號(11)的對比,可以看出,二者的頻率形式完全一致,都是外界角速率或者振動信號被驅動運動調制后的頻率成分。這就導致陀螺儀帶寬范圍內的振動誤差信號不能被電路中的帶通濾波器濾除。雖然誤差信號和角速率信號的相位相差π/2,但由于系統的相位誤差等原因,該信號不會被后續的解調系統完全消除,最終表現在陀螺的輸出上,影響陀螺儀的性能。
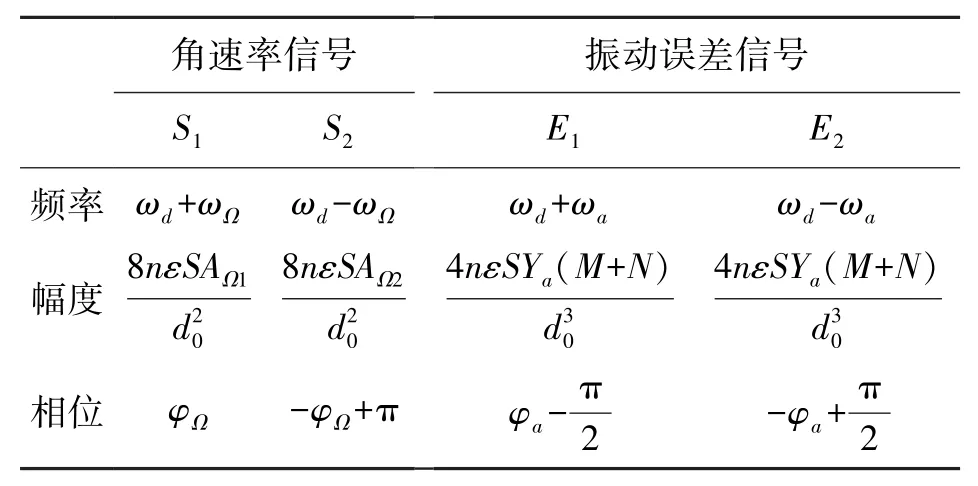
表1 角速率信號和振動誤差信號對比
3 結構設計優化
由式(11)可知,振動誤差信號的幅度由檢測質量對振動的響應幅度Ya以及檢測電極的變形M與N的和共同決定,只有任何一個單獨作用時誤差信號都不會產生。由于振動響應幅度Ya主要由外界振動信號的大小決定,我們主要通過減小檢測電極變形來減小振動誤差信號的幅度,若M與N的和為0,則該誤差完全消除。
圖3所示的MEMS陀螺儀的左側結構和右側結構通過檢測質量的內側框架耦合在一起,而外側沒有任何連接,使得驅動過程中檢測質量的內外兩側由于受力狀態不同導致變形不一致,該變形傳遞到檢測電極導致了電極變形的差異。
由前面的分析可知,優化的目標是使M與N的和最小。我們對結構進行了如下改進:①去掉檢測質量框架內側的耦合連接;②將驅動質量的框架內側由開放形式修改為封閉形式;左右兩側檢測結構通過驅動質量的框架內側進行耦合連接。
優化后的MEMS陀螺結構如圖6所示,和優化前相比,MEMS陀螺儀的驅動頻率、驅動位移均保持不變。
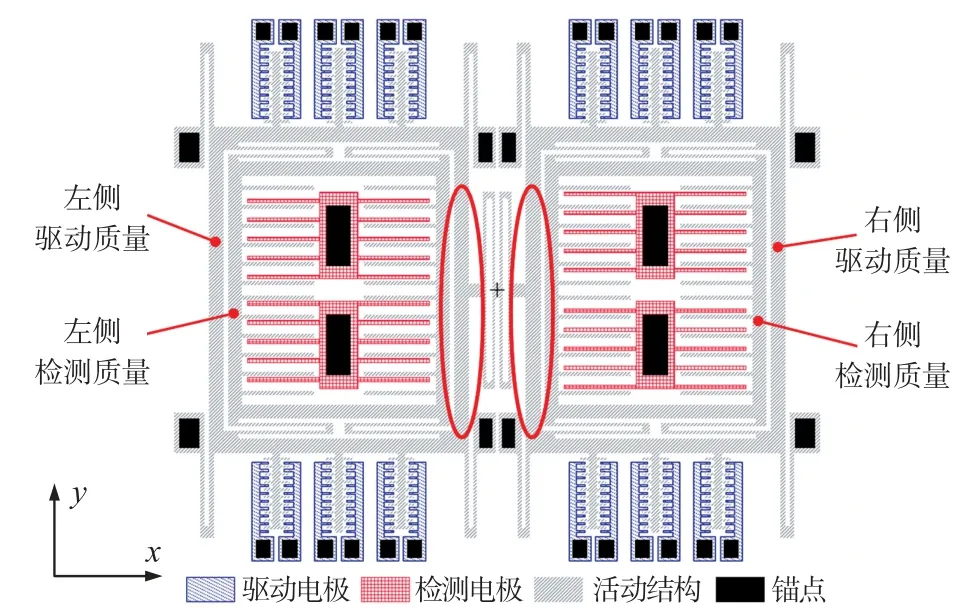
圖6 優化后的MEMS振動陀螺儀結構示意圖
對優化后的結構重新進行諧響應分析,得到結構在驅動力作用下的位移響應如圖7(a)、(b)所示。表2列出了優化前后的仿真結果對比,可以看出優化前后MEMS陀螺儀驅動頻率和驅動位移基本保持不變的前提下,檢測電極在驅動運動中的變形由原來的0.193μm下降到0.099μm,下降了48.7%;和驅動位移的比值由原來的0.019下降到0.010。最重要的是,檢測框架內外兩側的電極變形由同向變為反向,如圖7(b)所示。雖然二者的變形仍然保持一定幅度,但M與N的和接近于0,二者的誤差信號很大程度上會被相互抵消。
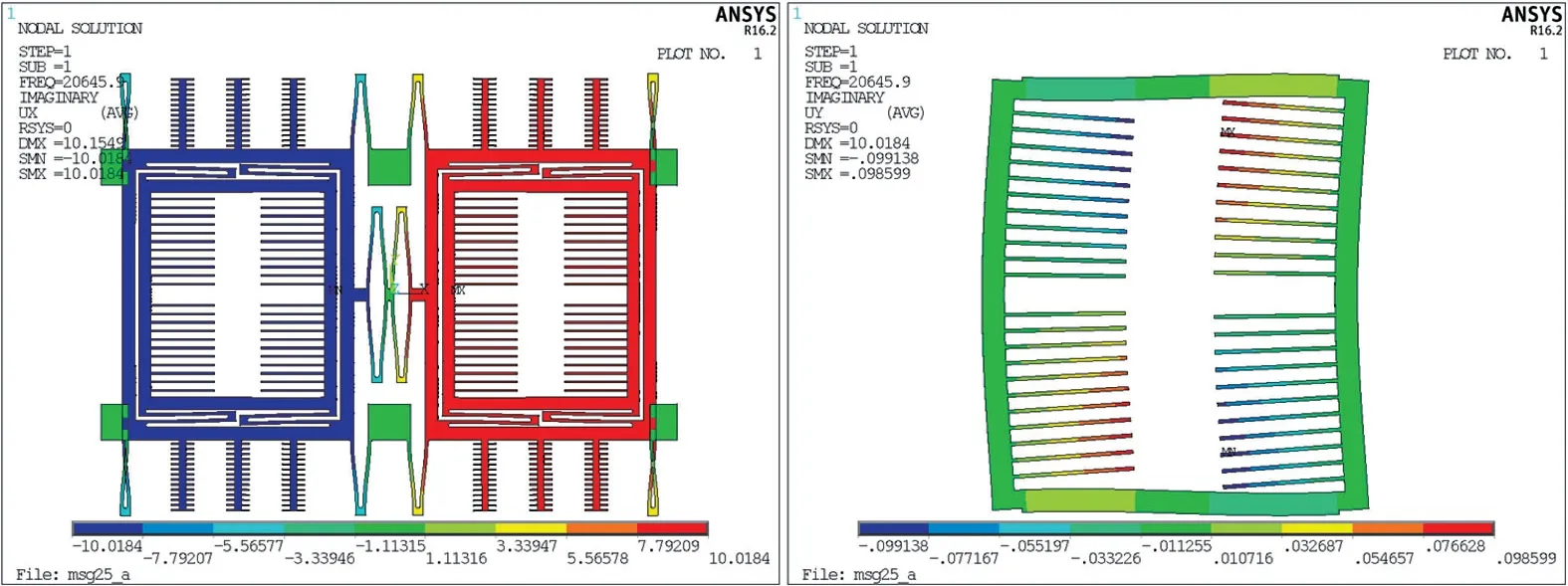
圖7 改進后的MEMS陀螺儀驅動位移仿真結果
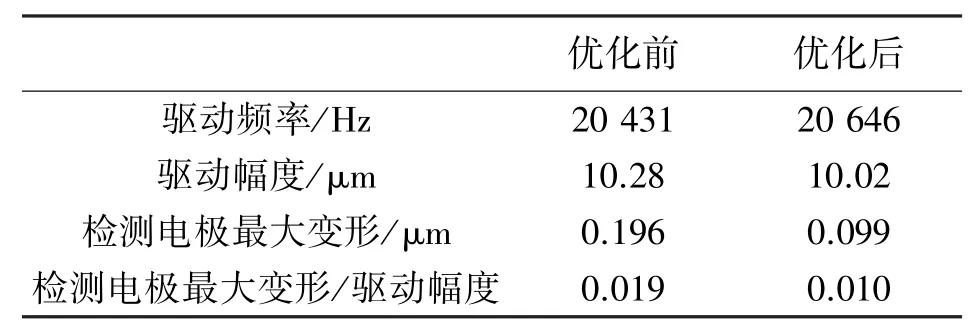
表2 MEMS陀螺結構改進前后驅動仿真結果對比
4 試驗驗證
為了驗證檢測電極變形對MEMS陀螺儀振動性能的影響,分別對優化前后的MEMS陀螺儀進行振動試驗。試驗采用定頻振動的方式,MEMS陀螺儀安裝在振動臺臺面上,如圖8所示。振動激勵方向與檢測電極運動方向(y向)一致,振動過程中采集MEMS陀螺儀敏感結構的輸出信號,并對信號進行FFT變換,得到輸出信號的頻率成分與表1中的理論值進行對比。

圖8 定頻振動試驗臺
振動頻率分別取300 Hz、500 Hz、1 000 Hz,圖9(a)、(b)、(c)分別給出了優化前后不同頻率激勵下MEMS陀螺儀敏感結構輸出信號經FFT變換后的幅頻特性曲線。可以看出,振動中MEMS陀螺儀的誤差信號主要包括3項,中間項為正交耦合誤差,主要由加工工藝決定,其頻率對應MEMS陀螺儀的驅動頻率;另外兩項即為本文中討論的檢測電極y向變形與檢測質量振動響應相互耦合產生的誤差信號,在幅頻特性曲線上這兩項誤差位于正交誤差信號的兩側,其頻率和正交信號的頻率差值即為外界振動的頻率值。
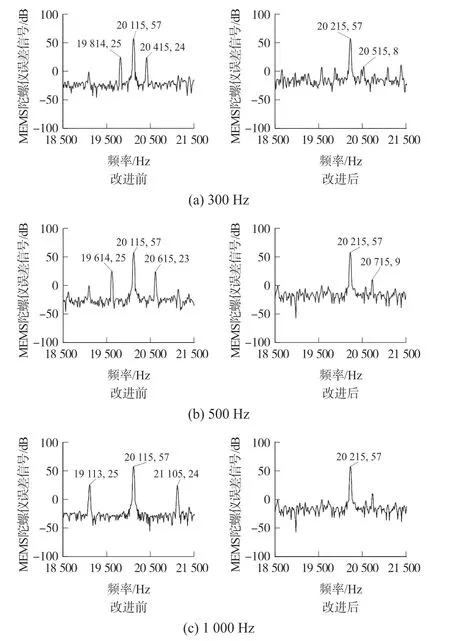
圖9 振動試驗中MEMS陀螺儀輸出信號的FFT變換曲線
表3給出了優化前后不同振動頻率下的振動誤差信號幅值對比,可以看出,優化前由于驅動運動過程檢測電極y向變形較大,振動誤差信號的幅度也比較大,為24 dB左右,并且不隨激勵頻率變化而變化;優化后檢測電極y向變形降低,且檢測質量內外側變形相位相反,使得誤差信號相互抵消,最終的誤差信號幅度小于10 dB,大部分被噪聲淹沒,幾乎觀察不到,殘余部分的幅值也非常小,不會對陀螺的性能產生影響。
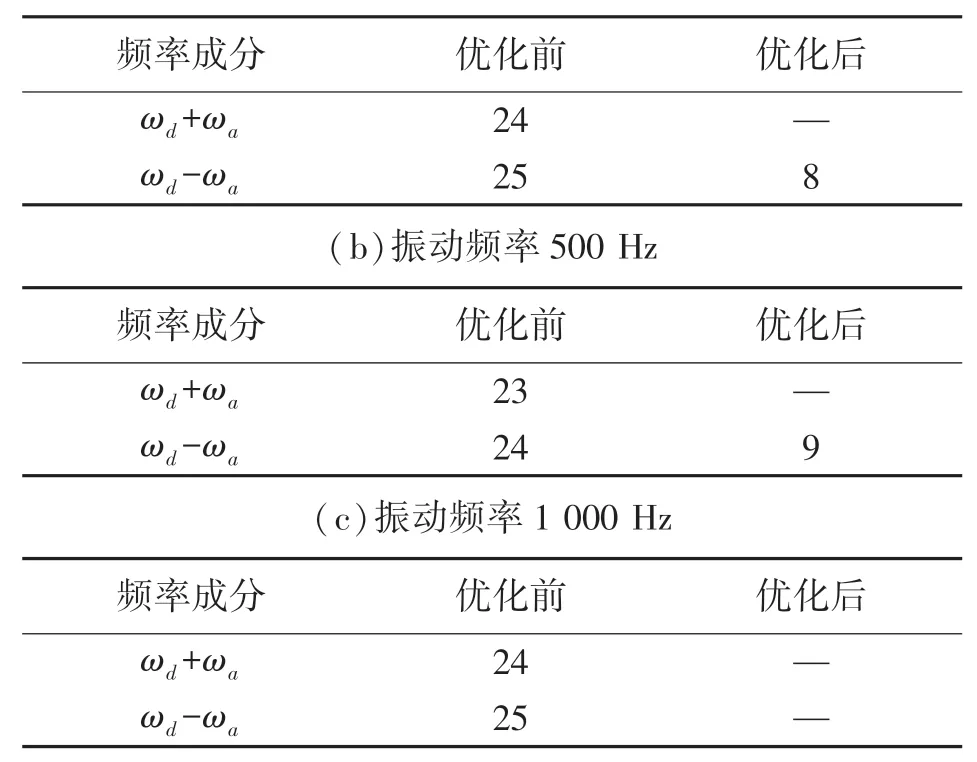
表3 優化前后振動誤差信號幅值對比 單位:dB(a)振動頻率300 Hz
5 總結
本文針對MEMS音叉式陀螺儀的振動環境適應性問題,分析了驅動運動導致的檢測電極變形對陀螺儀振動性能產生影響的機理。當陀螺儀受到外界振動作用時,檢測質量產生的位移響應與檢測電極的變形相互耦合形成誤差信號,該誤差信號的頻率成分與角速率響應信號幾乎一致。若振動信號位于陀螺儀的帶寬范圍內,則誤差信號不會被電路系統濾除,從而影響MEMS陀螺的振動環境性能。通過優化檢測質量的受力狀態,降低檢測電極變形幅度,有效降低了誤差信號的幅度,提升了MEMS陀螺儀的振動性能。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中華詩詞(2020年1期)2020-09-21 09:24:52
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學物理學報(2017年6期)2018-01-22 02:26:40
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36