基于a&ω六自由度運動模型的船舶運動參數發生器
2022-08-17 09:45:02卞鴻巍祝中磊王榮穎
系統工程與電子技術 2022年8期
卞鴻巍, 祝中磊, 王榮穎, 馬 恒, 文 者
(海軍工程大學電氣工程學院, 湖北 武漢 430033)
0 引 言
航海模擬器是一種用于船舶模擬訓練的仿真平臺,通過虛擬現實技術、船舶運動仿真與控制技術模擬船舶在海洋中的運動,可以為操作者提供真實環境的感受和操作體驗,提升其操縱駕駛能力。船舶運動數學模型是船舶運動仿真與控制的核心,根據船舶自身與海況環境信息生成航海模擬器所需的船舶運動參數。
目前,最具代表性的船舶運動數學模型主要有分離型模型、整體性模型和響應性模型3類。整體性模型和響應性模型結構簡單,多使用系統辨識方法進行參數確定;分離型模型則由于具有建模方式靈活、水動力參數意義明確等優點,被應用在一系列復雜船型中。國內外多位學者針對不同類型的船舶,大都基于上述3類模型和改進,開展相應研究。如文獻[14]對氣墊船的操縱運動進行建模仿真,較詳細地分析了回轉運動過程中氣墊船的側漂、內傾以及風力對氣墊船的影響;文獻[15]利用非線性時域條帶法對高速滑行艇結構響應以及流體力學和結構慣性載荷和運動響應展開了研究;文獻[16]為模擬拖輪協助大型船舶的操縱過程,采用分離型模型的建模思想,建立了相應的船舶運動數學模型等。
對于運動狀態模擬仿真精度和操控逼真性要求突出的應用場合,上述方法存在船舶運動數學模型的有效性難以驗證的問題。主要原因如下:一是由于實船的六自由度船舶數學模型較為復雜,大多學者根據現實需求建立簡化模型,仿真出的船舶運動參數較為理想化,與船舶實際運動效果存在較大差異;二是因實驗成本高、周期長,導致建立船舶運動數學模型所需的實驗數據較難獲取;三是缺乏統一、完備的驗證評估體系,如大多學者僅針對船舶模型的旋回性進行驗證,未評估模型在船舶加減速等機動情況下的性能。
針對上述問題,本文提出了一種新的船舶運動參數發生器設計方法。該發生器的設計思路為:① 在船舶運動響應模型的基礎上,分析船舶在各種機動狀況下的線加速度與角速度(linear acceleration and angular velocity,&近似解析表達式,建立基于&的船舶運動模型;② 采取遞推最小二乘法估計模型中的未知機動參數,并基于建模得到的線加速度與角速度,通過船舶運動微分方程生成六自由度的船舶運動參數信息;③ 為各船舶運動參數設定相應的模擬仿真精度閾值,根據閾值建立相似度評估指標,以驗證采用發生器進行仿真分析的有效性。
與傳統船舶運動數學模型相比,該發生器的模型需估計的未知參數少,因此對實驗數據的要求低,有效降低了建模難度。通過采集的實船實測數據,對建立的模型在船舶的各種復雜機動下進行了仿真驗證和相似度評估。結果驗證了方法的有效性。
1 基于a&ω六自由度運動模型
本文采取的船舶運動模型定義為在船舶自身機動作用下船舶加速度和角速度的方程。為展示建立&六自由度運動模型的完整步驟,繪制利用實測數據搭建模型的流程如圖1所示。
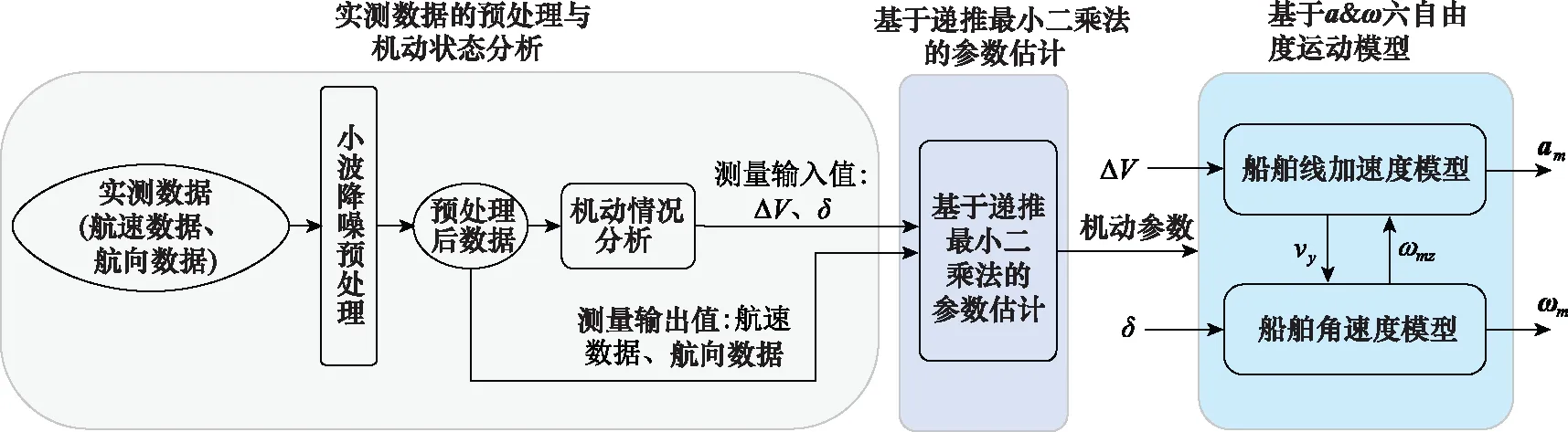
圖1 利用實測數據搭建船舶運動模型的流程Fig.1 Process of building ship motion model using measured data
為方便敘述,本文首先介紹了船舶運動模型的建立,然后在船舶運動參數的求解小節中講述了采用遞推最小二乘法估計模型中的未知機動參數的方法。圖1中的實測數據預處理與機動情況分析的主要作用是對采集的實測數據進行降噪處理,并分析采用遞推最小二乘法進行參數估計時所需的測量輸入值(計劃航速變化量Δ和舵角),該部分內容本文暫不贅述。
下面以船舶計劃航速變化量Δ、舵角為輸入量,針對船舶各種機動情況,分別討論分析船舶線加速度和航姿角速度的表達式。
1.1 船舶航姿角速度

111 縱搖角速度
由于船舶復原力矩較大,船舶在靜水中運動時縱搖角通常保持在零附近,可認為船舶縱搖角速度也近似為零,即=0。
112 橫搖角速度
船舶在靜水中勻速、變速直線運動時的橫搖角近似為零,而在回轉運動時,由于離心加速度的影響,船舶會橫傾一定角度。這一過程中橫搖角()可采用下述函數模擬:

(1)
式中:、、分別表示橫搖角變化的阻尼比、振蕩頻率、初始相位,為自定義參數;為船舶回轉運動定常階段時的橫傾角,由文獻[28]可知
(2)
式中:表示船舶的縱向加速度;表示重力加速度。
在回轉運動結束時,船舶由橫傾逐漸恢復為平穩狀態,此時橫搖角()可表示為

(3)
式中:、、分別表示衰減系數、振蕩頻率和初始相位,為自定義參數。對式(1)和式(3)求導即可得到橫搖角速度。
113 航向角速度
由經典的Nomoto響應模型可知,航向角速度與舵角的關系為

(4)
(5)
設舵角為幅值為的階躍響應時,航向角速度時域表達式為

(6)

1.2 船舶線加速度
為方便描述、簡化分析,定義一個新坐標系系:其坐標系原點為船舶質心,軸在水平面內沿船舶橫向指向右方,軸沿船舶縱軸指向船艏,軸方向由右手法則確定。

121 橫向線加速度
船舶在直線運動時,橫向線加速度近似為零;船舶在回轉運動時,橫向線加速度充當船舶的離心加速度。設此時航向角速度為、縱向速度為,由文獻[28]可知
=
(7)
122 縱向線加速度
船舶在勻速狀態下縱向線加速度=0,在變速狀態下≠ 0。下面以船舶變加速為例求解的近似解析表達式。
分析大量實測數據可知,船舶加速時的速度曲線與二階系統階躍響應曲線較為相似。因此,本文采用二階系統階躍響應函數作為船舶加速時縱向速度的近似解析表達式,對其求導后得到船舶線加速度。
設某一時刻(為簡化分析設為零時刻)船舶縱向速度為,計劃航速增加Δ后,縱向速度近似解析表達式為

(8)
123 天向線加速度
船舶在靜水環境中運動時,在天向上的位移較小,因此船舶的天向線加速度可近似視為零。
由上述內容可知,以計劃航速變化量Δ、舵角為輸入,可計算出船舶機動線加速度與角速度,各分量求解流程如圖2所示(與為零)。
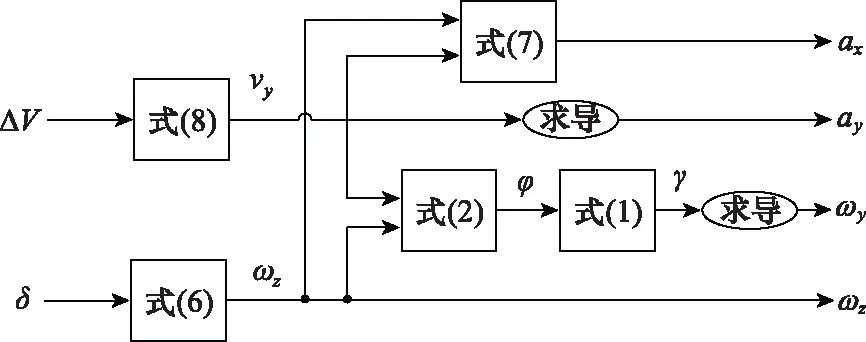
圖2 a與ω的分量求解流程Fig.2 Solving process of a and ω component
2 船舶運動參數的求解
2.1 基于遞推最小二乘法的參數估計
第1節講述了船舶關鍵運動參數——加速度和角速度的模型,針對模型中的未知參數(見表1),可采用遞推最小二乘法進行參數估計得到其估計值。

表1 未知參數列表
遞推最小二乘法是一種基于無偏估計的辨識方法,其原理簡單、易于實現。最小二乘法采用的模型結構為
()=()()+()
(9)
式中:()、()是系統連續輸入和輸出變量;()是零均值的白噪聲向量。
將式(9)寫成最小二乘格式,即
()=()+()
(10)
式中:()=[-(-1),-(-2),…,(-),(-1),(-2),…,(-)],為()分母中的未知參數的個數,為()分子中的未知參數的個數;為待估計的參數向量。
基于遞推最小二乘法的參數估計算法1如下所示。
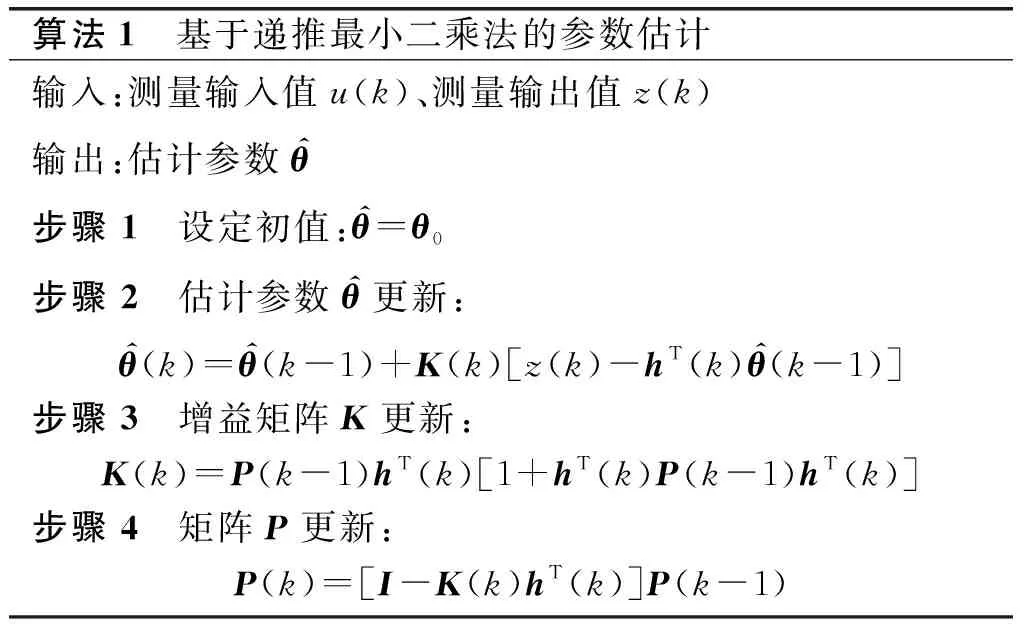
算法1 基于遞推最小二乘法的參數估計輸入:測量輸入值u(k)、測量輸出值z(k)輸出:估計參數θ^步驟 1 設定初值:θ^=θ0步驟 2 估計參數θ^更新:θ^(k)=θ^(k-1)+K(k)[z(k)-hT(k)θ^(k-1)]步驟 3 增益矩陣K更新:K(k)=P(k-1)hT(k)[1+hT(k)P(k-1)hT(k)]步驟 4 矩陣P更新:P(k)=[I-K(k)hT(k)]P(k-1)
2.2 船舶運動微分方程

(11)
(12)
(13)
式(12)和式(13)中:

(14)
(15)
(16)
(17)
(18)
式(15)和式(16)中,、為地球長半軸半徑和扁率,可分別取=6 378 137 m,=1298 257。
3 評估指標
為評判本文的仿真結果與實測數據的相似程度、驗證建模方法的有效性,需建立評估船舶各運動參數的基準真值與評估指標。以組合接收機的位置信息、多普勒測速儀的速度信息、慣導的姿態信息作為基準,為減小測量噪聲的干擾,采用小波變換對各導航信息濾波。為評判發生器的仿真效果,提出相似度評估指標,下面介紹計算步驟。
(1) 計算每一時刻(記為時刻)仿真數據與實測數據之間的誤差:
=-
(19)
除位置誤差外,其余運動參數(如航速、縱搖、橫搖等)均根據式(19)計算,位置誤差的計算方法為

(20)
式中:、為仿真數據的緯度與經度;、分別為實測數據的緯度與經度。
(2) 將誤差與閾值Thr進行比較,如果在閾值范圍內則視為正確,如果在閾值范圍外則視為錯誤,
(21)
(3) 計算所有時刻仿真數據的準確率,定義相似度為
(22)
式中:為數據長度。
4 試驗驗證
為驗證本文方法的有效性,分析船舶在自身機動作用下的船舶運動模擬仿真情況,選取一段海面較為平靜且在建模時未用過的實測數據進行仿真(船舶參數如表2所示)。該段數據對應的船舶機動狀況如表3所示。表中模擬舵角值由船舶回轉運動穩定時的航向角速度,除以式(6)中的值得到;表中“直線”主要是相對于回轉運動而言,此時模擬舵角值為零,由于船舶實際回轉運動過程的舵角未知,而模擬舵角值與舵角成比例變化,因此以模擬舵角值替代舵角值。由表3可知,該段實測數據中,包含直線勻速、直線加速、回轉加速、回轉減速等船舶多種機動狀況,能夠更全面測試本文模型對船舶運動的模擬效果。
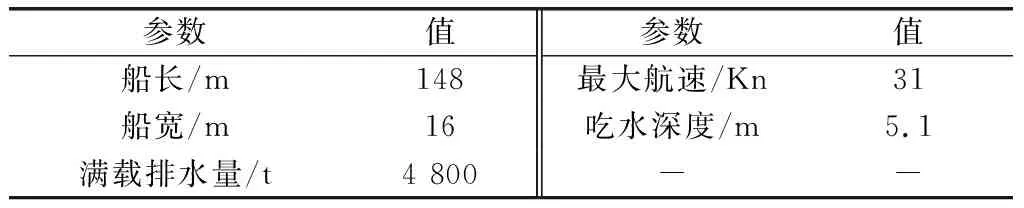
表2 船舶參數

表3 機動狀況
船舶初始位置為經度122.904 8°、緯度30.858 1°,初始速度為5.28 m/s,初始航向角為135°,橫搖角為1°,縱搖角為0.1°。由表3中的船舶機動狀況信息,通過船舶運動參數發生器仿真船舶各主要運動參數,如圖3所示。
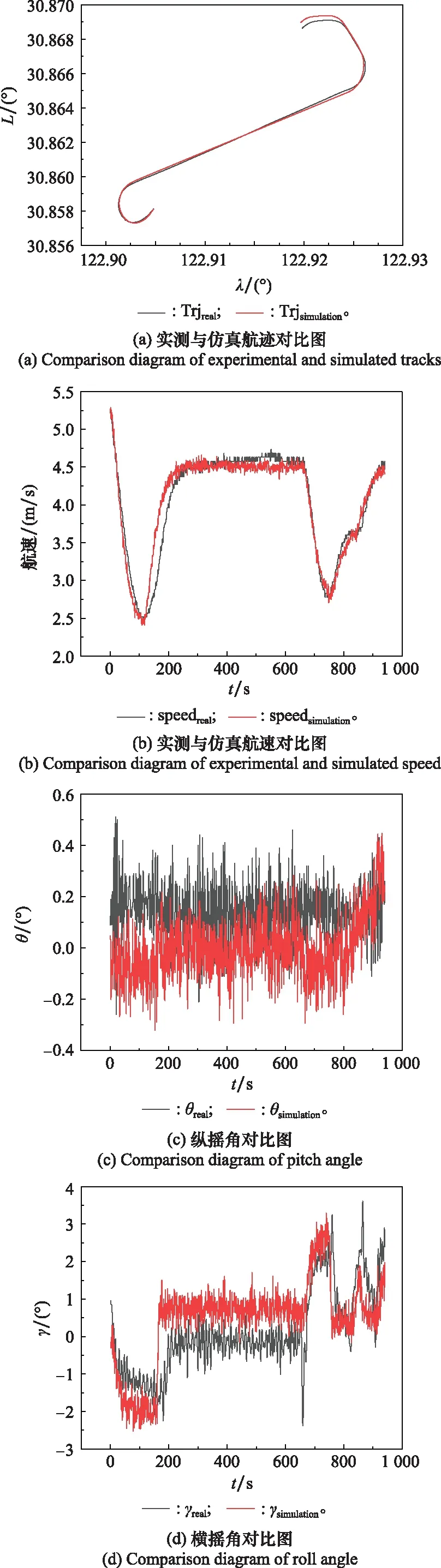
圖3中各運動參數下標為real表明該參數是實測數據,下標為simulation表明該參數是仿真數據。由圖3(a)可知,在第一個回轉運動以及隨后的直線運動時,仿真航跡與實測航跡較為接近,表明模型能很好地根據船舶實際的機動情況仿真出船舶實際的航跡;在第二個回轉運動過程中出現一定的偏差,這可能與第二次回轉運動過程中多次打舵有關,因為表3中的機動狀況是由實測數據分析得到,并非船舶實際運動過程中的機動情況,存在一定誤差。由圖3(b)可知,除110~260 s仿真速度與實際航速誤差相對較大外,其余時間段仿真效果較好,分析可知在110 s時刻船舶開始加速時仿真可能有所滯后。由圖3(c)和圖3(d)可知,仿真縱搖角和橫搖角能很好地模擬出實測數據的趨勢。由圖3(e)可知,仿真航向與實測航向較為接近,結合圖3(b)的航速圖,從側面說明了圖3(a)中航跡仿真偏差較小的合理性。
為更直觀評判仿真結果與實測數據的相似程度,計算各主要運動參數的相似度指標和均方根誤差(root mean square error, RMSE)指標如表4所示。
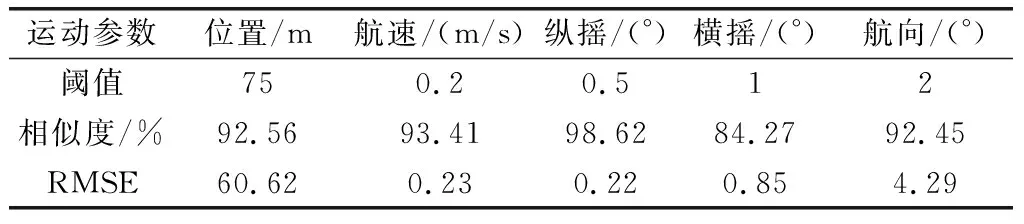
表4 各主要運動參數相似度與RMSE
相似度指標反應了可接受的誤差范圍(閾值)內的準確率,RMSE指標反應了誤差統計規律。從理論上說,RMSE值越小,相似度評估指標越高;同時,相似度的值與閾值有關,其值可根據各船舶運動參數的模擬仿真精度要求設定。與RMSE評估指標相比,本文中提出的相似度評估指標采用百分比的形式展示,更為直觀。由表4可知,在針對不同運動參數設置相應的閾值后,各主要運動參數的相似度均達到80%以上,且RMSE維持在閾值附近。這也從指標上說明了采用本文船舶運動參數發生器能較好地模擬船舶在多種機動狀況下的運動,比較貼近實際,本文方法的有效性得到驗證。
傳統整體型、分離型數學模型建模時所需的流體動力導數、水動力系數等參數的測定成本高、實驗花費大,且其仿真試驗需對船舶的槳力與舵力等進行賦值,然而在實船運動時這些數據難以獲得。因此,基于現有導航裝備采集的船舶位置、速度、姿態等數據,無法利用整體型、分離型數學模型進行仿真對比分析。為體現本文方法的優越性,本文采用文獻[30]中的方法進行對比仿真。文獻[30]中,將船舶的運動狀態假設為勻速、勻加速(勻減速)以及勻速圓周等理想化運動狀態。船舶參數和船舶機動情況仍如表2和表3所示,位置誤差的仿真結果如圖4所示。
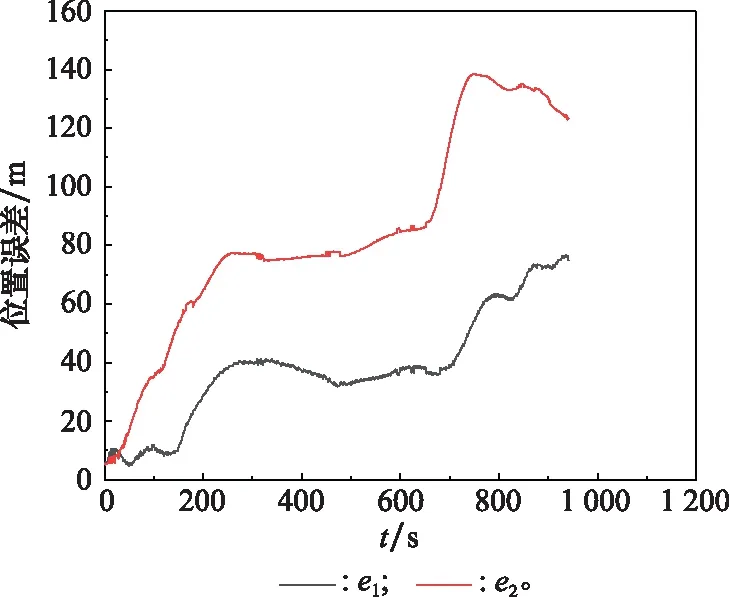
圖4 位置誤差對比圖Fig.4 Comparison diagram of position error
圖4中,、分別為采用本文方法和文獻[30]方法仿真得到的位置誤差曲線。由圖4可知,在船舶運動900多秒后,文獻[30]仿真得到的位置誤差已超過120 m,且經計算位置相似度僅為25.59%,這主要是由于文獻[30]采用勻速、勻加速等理想化運動狀態導致存在較大的累積誤差;而本文方法的位置誤差為70 m,位置相似度為92.56%,仿真精度得到極大提高。
5 結 論
本文設計了一種可供航海模擬器使用的船舶運動參數發生器,能模擬船舶的各種機動狀況、生成航海模擬器所需的各船舶運動參數。相比于傳統的船舶運動數學模型,該發生器除建模要求低外,還具備仿真效果貼近實際、相似度指標較高的優勢。本文設計的發生器對促進航海模擬器的船舶運動模擬仿真研究具有重要意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03