成像目標(biāo)質(zhì)心跟蹤算法適應(yīng)性研究
2022-08-17 10:53:58穆曉敬楊振聲劉紅梅黃子露
教練機 2022年2期
穆曉敬,楊振聲,劉紅梅,黃子露
(航空工業(yè)洪都,江西 南昌, 330024)
0 引言
紅外成像制導(dǎo)是利用目標(biāo)和背景的熱輻射差,形成目標(biāo)與背景的紅外信息來實現(xiàn)自動導(dǎo)引的一種制導(dǎo)方法。瞄準(zhǔn)系統(tǒng)中使用的紅外系統(tǒng)自動從背景雜波中選擇和識別目標(biāo),并使用門限技術(shù)來做出識別和選擇。 當(dāng)目標(biāo)被檢測或識別出來后,需要對目標(biāo)進行實時跟蹤,即實現(xiàn)從當(dāng)前幀目標(biāo)到后一幀目標(biāo)的對應(yīng)與匹配。
本文對成像目標(biāo)質(zhì)心跟蹤算法進行研究,分別建立基于種子點生長和閾值分割的質(zhì)心跟蹤算法MATLAB 數(shù)學(xué)模型,基于簡單背景和復(fù)雜環(huán)境進行性能仿真,并應(yīng)用相關(guān)策略實現(xiàn)目標(biāo)跟蹤,統(tǒng)計目標(biāo)跟蹤特征量,對質(zhì)心跟蹤算法適應(yīng)性進行綜合評估。
1 基于種子點生長的質(zhì)心跟蹤算法
1.1 種子點生長算法
種子點生長算法是指依據(jù)事先給定的相似性準(zhǔn)則(生長準(zhǔn)則),將相鄰且滿足相似性準(zhǔn)則的像素或子區(qū)域合并成同一區(qū)域的過程。種子點生長法面臨的問題有3 個:種子點選取,相似性準(zhǔn)則確定,生長停止的條件。 紅外圖像一般選擇高亮的像素作為種子點,依據(jù)像素之間灰度值的差異作為生長準(zhǔn)則,并通過預(yù)先設(shè)定門限來判斷是否進行生長,直到所有像素遍歷完,則停止生長。
種子點生長算法原理如圖1 所示,其中下標(biāo)為像素點序號,紅色字體表示像素點灰度。
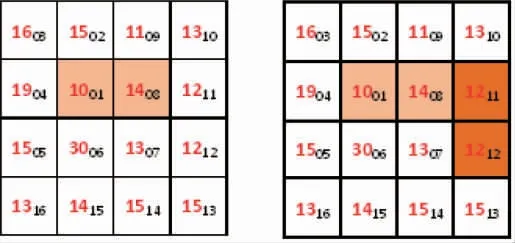
圖1 種子點生長過程
假設(shè)當(dāng)前種子點為01 點, 則在其8 鄰域連通像素中,像素點08 的灰度值與種子點的灰度值最接近,像素點08 被加入到生長區(qū)域中,并且像素點08 作為新的種子點執(zhí)行后面的過程。 在第二次循環(huán)過程中,待分析圖像中像素11、12 的灰度值和已生長區(qū)域(由01 和08 組成)的灰度均值12 最接近,像素點11、12被加入到生長區(qū)域中。
種子點生長基本步驟如下:
1) 圖像預(yù)處理:圖像區(qū)域生長基于像素,去除圖像中一些灰度不正常的噪聲點可明顯改善圖像分割效果,本文采用均值濾波去除這些噪聲。
2) 邊緣檢測: 圖像邊緣是圖像局部特性不連續(xù)性, 標(biāo)志著一個區(qū)域的終結(jié)和另外一個區(qū)域的開始。本文采用Sobel 算子進行圖像邊緣提取。
3) 種子點的自動選取
種子像素的選取常借助具體問題的特點。在軍用紅外圖像中檢測目標(biāo)時, 通常由于目標(biāo)輻射較大,可選用圖中最亮(或最暗)的點作為種子像素。如果對具體問題沒有先驗知識,則可借助生長準(zhǔn)則對每個像素進行計算,若計算結(jié)果呈聚類現(xiàn)象,則接近聚類中心的像素可取為種子像素。在圖像跟蹤過程中目標(biāo)一般位于圖像的中心處, 可選取圖像的中心作為種子點。這里為了避免一些隨機噪聲點的影響,種子點生長算法選取圖像3×3 鄰域灰度均值最大的像素作為種子像素點。
4) 生長判決條件及過程
設(shè)得到的邊緣像素點集中,邊緣像素點的總數(shù)為,灰度分別為(0),(1),…,(-1),種子點的像素灰度為M,計算平均相似度:
作為區(qū)域生長過程的分割閾值。 另外,計算種子區(qū)域中的像素點與候選像素之間的相似性是否滿足:
5) 搜索種子點的8 鄰域像素點, 若與種子點相鄰的像素的灰度與種子點本身的灰度差異小于預(yù)先設(shè)定的門限T,則認(rèn)為該像素與種子點隸屬于同一個區(qū)域,將其標(biāo)記為一類,將種子點的值賦予當(dāng)前點,并以當(dāng)前點為種子點繼續(xù)生長;若灰度值差異大于門限T,認(rèn)為當(dāng)前像素點與種子點不屬于同一類,則跳過當(dāng)前點,繼續(xù)下一個像素點的判斷,執(zhí)行步驟6)。
6) 判斷當(dāng)前像素點是否已標(biāo)記以及是否最后一個像素點,若已標(biāo)記,則跳過該點,繼續(xù)下一個相鄰點的判斷;反之,則執(zhí)行步驟(6);若已是圖像最后一個像素點,則結(jié)束循環(huán)。
1.2 基于種子點生長的質(zhì)心跟蹤算法仿真分析
基于種子點生長的質(zhì)心跟蹤算法就是利用種子點生成圖像跟蹤目標(biāo),程序流程圖如圖2 所示。
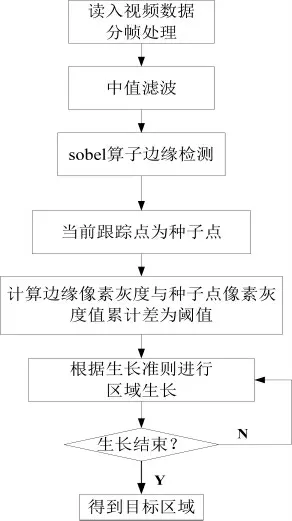
圖2 種子點生長算法流程圖
根據(jù)種子點生長規(guī)則,目標(biāo)跟蹤效果主要受種子點選取和生長閾值的影響。戰(zhàn)場環(huán)境中涉及紅外成像目標(biāo)可分為簡單背景目標(biāo)和復(fù)雜背景目標(biāo),根據(jù)目標(biāo)距離關(guān)系可分為成像小目標(biāo)和大目標(biāo),根據(jù)目標(biāo)特性可分為無紋理目標(biāo)和紋理豐富目標(biāo)。本文采用Matlab軟件就該算法對不同目標(biāo)適應(yīng)性進行仿真分析。
在目標(biāo)跟蹤過程中,遠(yuǎn)距離時目標(biāo)成像小,隨目標(biāo)距離逼近,目標(biāo)成像逐漸增加直至充滿視場。 首先對遠(yuǎn)距離小目標(biāo)跟蹤效果進行分析。選取某簡單背景下的暗目標(biāo)如表1 所示,目標(biāo)大小約為視場的1/20,分別以跟蹤點和偏離跟蹤點3 個像素取為種子點進行仿真。
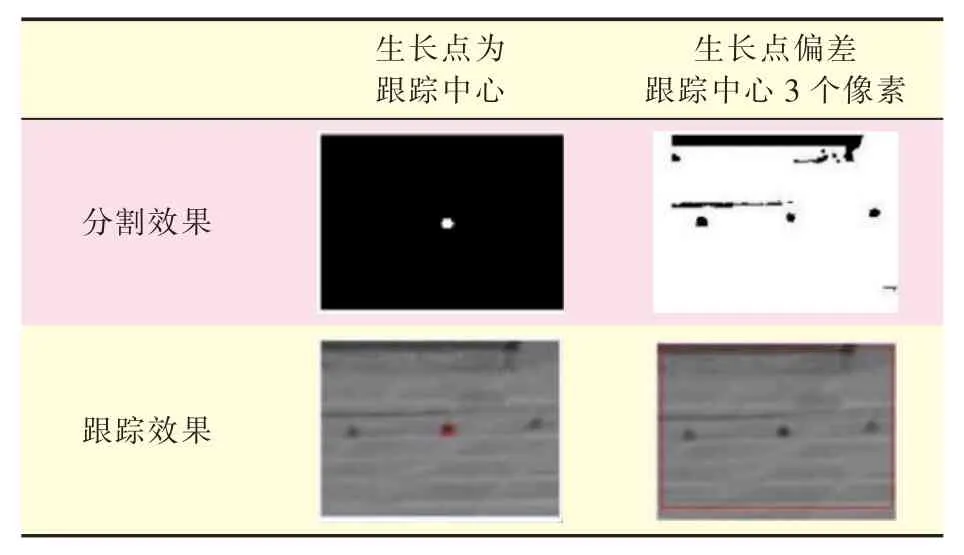
表1 小目標(biāo)靜止圖像跟蹤仿真
當(dāng)目標(biāo)較小生長點偏差3 個像素時生長圖像無法生成跟蹤目標(biāo),尤其在遠(yuǎn)距離跟蹤過程中,其質(zhì)心跟蹤點逐漸漂移到目標(biāo)邊界影響跟蹤效果。
目標(biāo)與背景的對比度也影響著目標(biāo)跟蹤穩(wěn)定性。選取合適種子點對簡單背景下低對比度目標(biāo)進行仿真, 當(dāng)視場中目標(biāo)具有一定大小且目標(biāo)紋理不明顯(低對比度目標(biāo))時,種子點生長算法具有良好分割效果,如表2 所示,能夠?qū)崿F(xiàn)目標(biāo)的穩(wěn)定跟蹤。
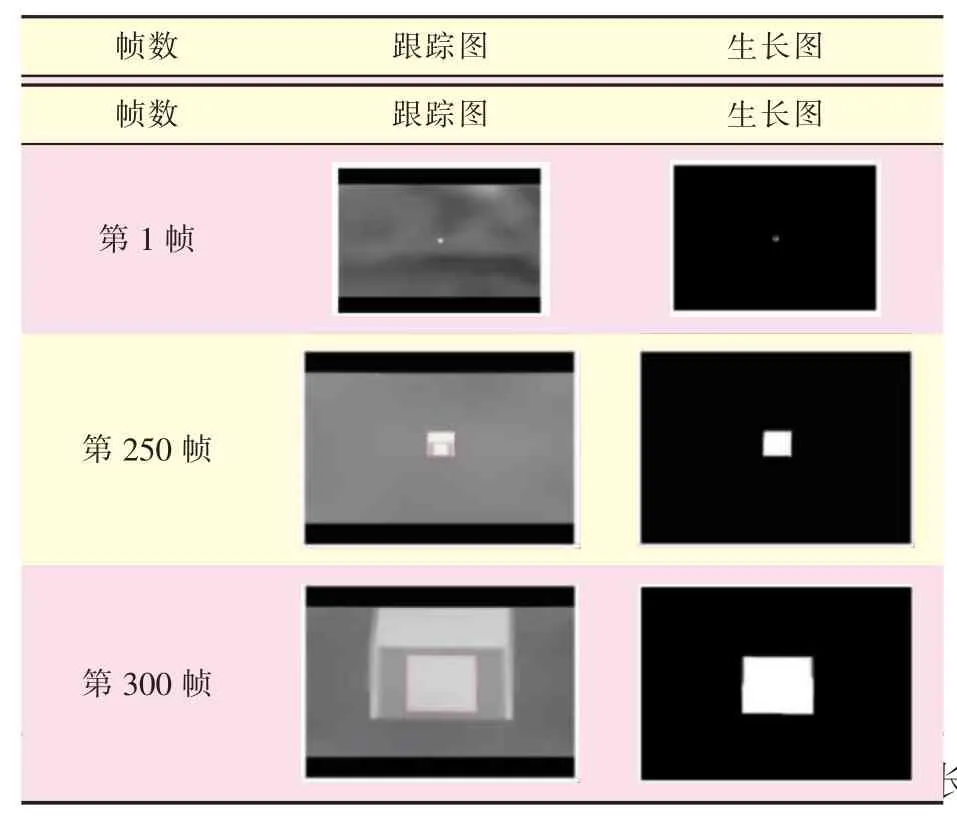
表2 種子點生長算法結(jié)果
綜上可知:對于遠(yuǎn)距離小目標(biāo),基于種子點生長的質(zhì)心跟蹤算法有一定的局限性,但是可以通過相關(guān)策略對跟蹤效果進行修正,一是對目標(biāo)跟蹤點進行人工在線修正;二是在目標(biāo)逼近的過程中,隨著目標(biāo)增大,跟蹤點不會漂出目標(biāo)外且目標(biāo)與背景對比度較明顯,此時再介入質(zhì)心跟蹤。考慮到目標(biāo)增大種子點生長全目標(biāo)的時間增加,實際應(yīng)用中需要對該算法進行簡化,并對處理器運算能力提出了一定的要求。
2 閾值分割的原理分析
閾值分割首先確定一個處于圖像灰度級范圍內(nèi)的灰度閾值T,然后將圖像中每個像素的灰度值都與這個閾值T 比較,根據(jù)它是否超過閾值T 而將該像素歸于兩類中的一類。 常用的方法就是設(shè)定某一閾值T,用T 將圖像分割成大于閾值T 的像素群(目標(biāo))和小于閾值T(背景)的像素群兩部分。
設(shè)輸入圖像是F(x,y),輸出圖像是B(x,y),則:

由此可以看出,確定最優(yōu)的分割閾值是閾值分割的關(guān)鍵所在,決定了圖像分割的效果。 目前常用的閾值分割方法有:直方圖峰谷法、最大類間方差法、最大熵法、基于統(tǒng)計的閾值分割法等。 本文主要使用基于灰度統(tǒng)計的閾值分割方法。
對于不同的背景圖像,其分割閾值不應(yīng)該是固定,而自適應(yīng)閾值一定跟圖像的某些統(tǒng)計屬性有關(guān)。統(tǒng)計發(fā)現(xiàn),可以利用圖像的灰度均值以及方差來確定閾值,因此,基于灰度統(tǒng)計的閾值分割方法的主要思想可以描述如下:
根據(jù)圖像的灰度均值及方差統(tǒng)計圖像來確定門限th,即
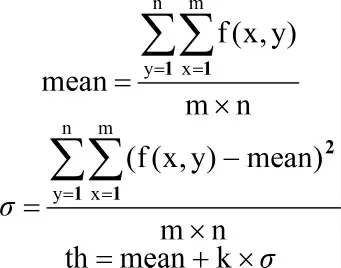
其中,m,n 為處理圖像的長和寬;mean 為整幅圖像的平均灰度值;σ 為整幅圖像的灰度標(biāo)準(zhǔn)差;k 為常數(shù),可以通過試驗反復(fù)調(diào)整獲得。 窗口寬度m,n 的選擇對閾值分割效果影響較大。 若m 取值過大,則有可能失去局部處理的意義, 同時也會產(chǎn)生大量的計算,導(dǎo)致算法運行速度較慢。 若m 取值過小,則可能導(dǎo)致前景或背景內(nèi)部產(chǎn)生噪聲干擾。參數(shù)k 對圖像的分割效果也有著一定的影響,一般試驗參數(shù)k 取3 較為理想,既不會引入太多的虛假噪聲點;也不會影響目標(biāo)的形狀分割。這種基于灰度統(tǒng)計閾值分割算法特別適合于對小目標(biāo)圖像的處理。
工程上常采用如下的閾值分割參數(shù):
當(dāng)目標(biāo)與背景有一定灰度差時:
分割閾值=背景均值+3*背景方差
當(dāng)目標(biāo)與背景有一定的灰度差,但對比度較小時:
分割閾值=(1-)* 背景均值+(1-) 前景均值+(3*背景方差+3*前景方差)
該方法適用于目標(biāo)位于圖像中心且所占視場比例較小的情況。
2.1 基于閾值分割的質(zhì)心跟蹤仿真分析
本文采用基于灰度統(tǒng)計的閾值法來確定圖像分割的閾值,并結(jié)合幀間目標(biāo)信息實現(xiàn)目標(biāo)跟蹤。 算法流程圖如圖3 所示。
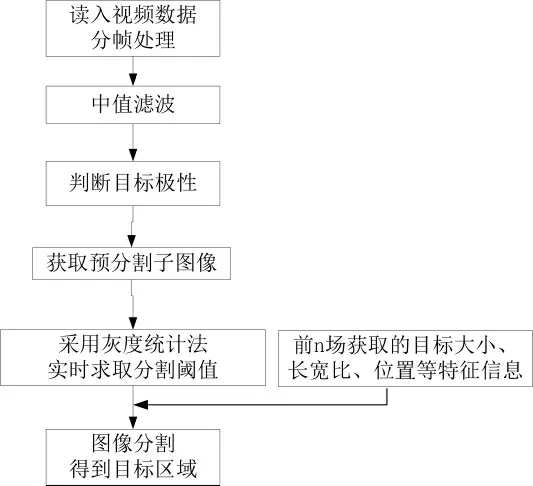
圖3 程序流程圖
為避免分割過程中背景比重、目標(biāo)大小對圖像分割的影響,本文采用子圖形進行圖像分割,即對包含目標(biāo)在內(nèi)的一定區(qū)域進行閾值分割,當(dāng)目標(biāo)超出當(dāng)前區(qū)域大小時, 采用下采樣的方法對圖像進行分割,分割完成后對跟蹤波門進行回歸處理。本文根據(jù)實際圖像和目標(biāo)的大小,選取的子圖像大小為64*64,采樣率分別為1 倍采樣、2 倍采樣和4 倍采樣; 若在原圖上進行圖像分割,由于目標(biāo)較小時,背景較多,干擾較大,會對分割效果有一定影響,采用子圖像進行圖像分割能夠有效改善該問題,同時采用不同采樣率設(shè)計能夠滿足目標(biāo)逼近過程中圖像分割的適應(yīng)性。圖像中采用紅色波門框表示圖像分割出的目標(biāo),藍(lán)色標(biāo)記點為目標(biāo)質(zhì)心跟蹤點。
采用MATLAB對不同背景下的目標(biāo)跟蹤特性進行仿真, 選取圖像跟蹤中的部分跟蹤結(jié)果進行說明,內(nèi)容包括跟蹤圖和分割圖兩部分,跟蹤圖為原始圖像加跟蹤波門,分割圖為不同子圖像下根據(jù)分割閾值分割出的目標(biāo)圖像。
1) 簡單背景下的目標(biāo)跟蹤
對簡單背景下低對比度目標(biāo)進行仿真分析,結(jié)果如表3 所示, 可見采用基于閾值分割的質(zhì)心跟蹤算法,在目標(biāo)由遠(yuǎn)到近、由小到大的逼近過程中能準(zhǔn)確分割出目標(biāo)并跟蹤,對于孤立目標(biāo)且與背景有一定對比度的目標(biāo)能穩(wěn)定跟蹤, 但是在目標(biāo)逼近充滿視場時,由于目標(biāo)較大,目標(biāo)紋理細(xì)節(jié)突出,圖像分割只分出目標(biāo)的一部分, 目標(biāo)跟蹤進入到目標(biāo)某部分的質(zhì)心。 此時跟蹤算法可通過對前后幀目標(biāo)長高比、占空比及其變化率的判定來對當(dāng)前目標(biāo)跟蹤進行判斷,決定是否退出質(zhì)心跟蹤,更換跟蹤策略。
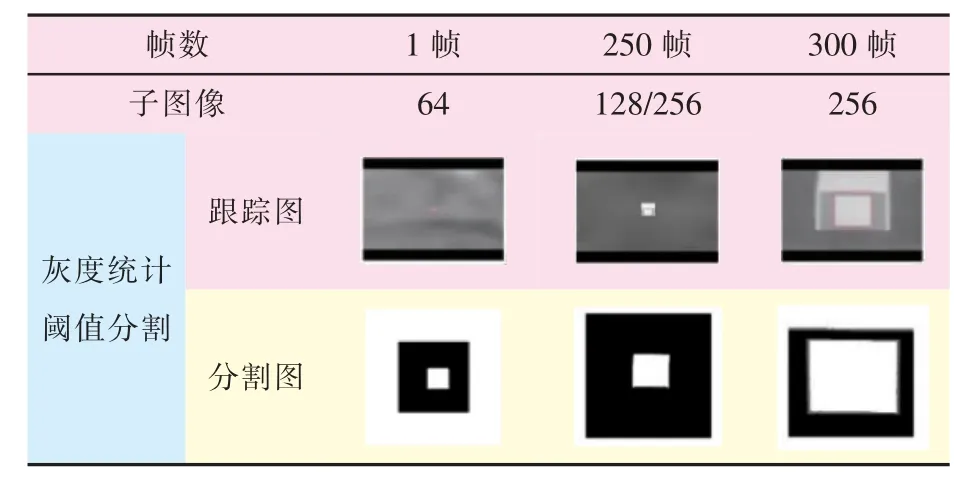
表3 簡單背景下的目標(biāo)跟蹤
可見,當(dāng)目標(biāo)位于圖像中心且所占視場比例較小時,該算法分割的子圖像形狀規(guī)則、邊緣清晰,分割效果良好,圖像逐漸增大過程中能夠?qū)崿F(xiàn)目標(biāo)穩(wěn)定跟蹤。
2) 復(fù)雜背景下的目標(biāo)跟蹤
對復(fù)雜場景中的目標(biāo)跟蹤進行仿真,采用質(zhì)心跟蹤算法存在質(zhì)心分割不完整的現(xiàn)象。該問題由目標(biāo)邊緣部分像素灰度值與背景灰度值相近且目標(biāo)內(nèi)部紋理豐富對比度較大造成。圖像分割時找不到合適的閾值,此時目標(biāo)分割不完整。
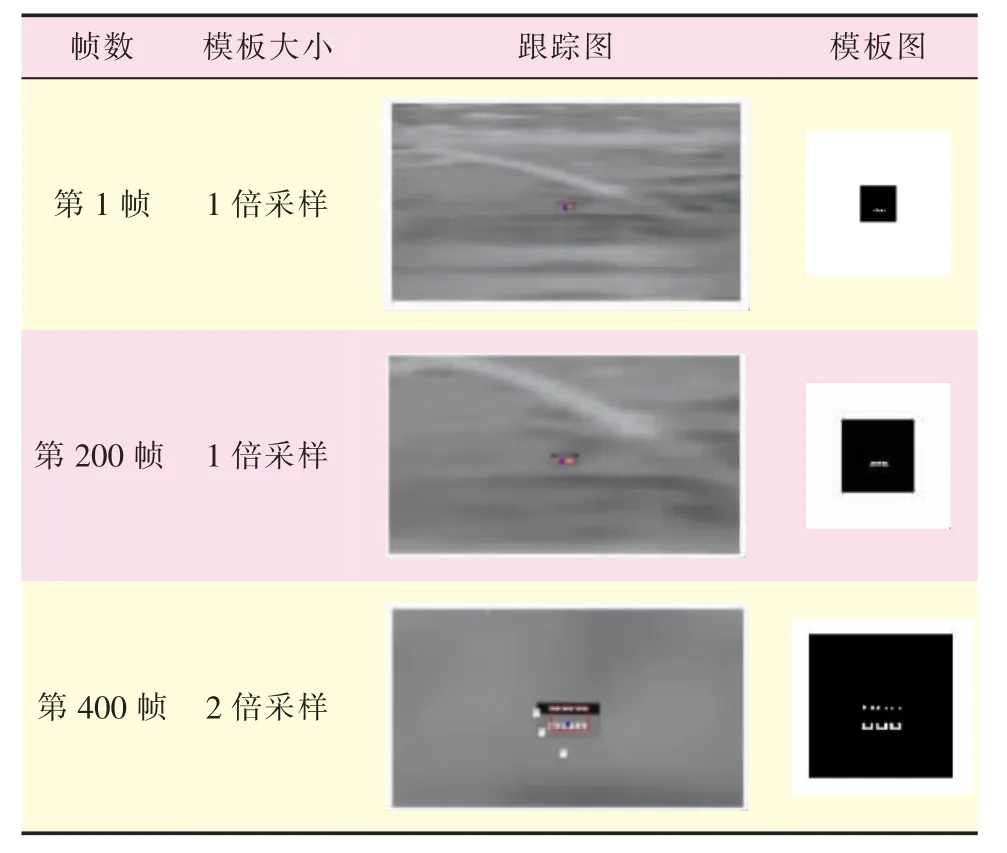
表4 復(fù)雜背景下的圖像跟蹤
基于閾值分割質(zhì)心跟蹤算法適用于目標(biāo)與背景有一定灰度差,且目標(biāo)灰度較均勻的場景。 灰度差較小的目標(biāo)和背景不適用于該方法, 需進一步改進研究。該方法也適用于復(fù)雜背景下與背景對比明顯的低對比度目標(biāo)跟蹤,對分割閾值加以約束,并對分割后的目標(biāo)占空比、長高比及其變化率進行判斷,可以得到穩(wěn)定的質(zhì)心分割結(jié)果。
3 基于種子點生長與閾值分割的質(zhì)心跟蹤對比分析
對同一背景目標(biāo),分別采用基于種子點生長和閾值分割的質(zhì)心跟蹤算法進行仿真研究,目標(biāo)為簡單背景下“田”字目標(biāo),仿真結(jié)果如表5 所示。
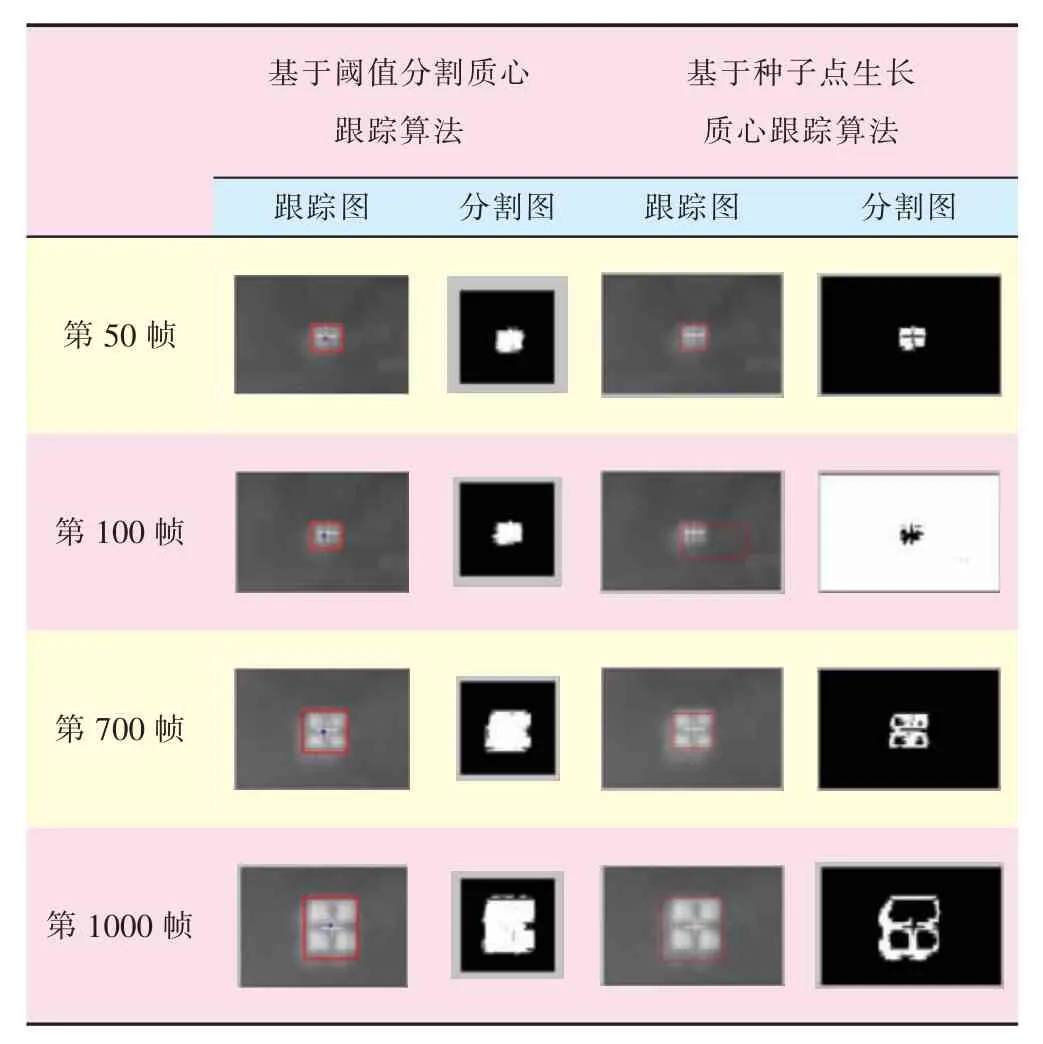
表5 基于種子點生長和閾值分割的質(zhì)心跟蹤算法仿真分析
基于閾值分割的質(zhì)心跟蹤算法在目標(biāo)跟蹤全程均能獲得較好的跟蹤效果,在目標(biāo)較小或由小到大的逼近過程中,目標(biāo)分割穩(wěn)定,能夠?qū)崿F(xiàn)穩(wěn)定跟蹤基于種子點生長的質(zhì)心跟蹤算法,在目標(biāo)較小時存在分割不穩(wěn)定的現(xiàn)象;當(dāng)目標(biāo)有一定紋理時,存在分割不完整的現(xiàn)象。
4 結(jié)語
本文主要研究了基于種子點生長和閾值分割的質(zhì)心跟蹤算法,并對其分別進行仿真分析。 仿真結(jié)果表明:基于種子點生長的質(zhì)心跟蹤算法適用于簡單背景下無紋理或低對比度目標(biāo),對于遠(yuǎn)距離小目標(biāo)由于跟蹤漂移的影響,會導(dǎo)致目標(biāo)分割不完整。 隨著目標(biāo)增大到視場一定比重后,種子點生長算法能夠穩(wěn)定生長出目標(biāo),進入穩(wěn)定的質(zhì)心跟蹤,直到目標(biāo)放大到超出質(zhì)心跟蹤的最大范圍,則退出跟蹤。 實際應(yīng)用中可通過對目標(biāo)距離的判定或分割目標(biāo)大小的判定決定是否啟用基于種子點的質(zhì)心跟蹤分割算法。若在跟蹤過程中可對跟蹤點進行修正,可以獲得良好的跟蹤效果。
基于閾值分割的質(zhì)心跟蹤算法,只利用圖像的灰度信息,不依賴當(dāng)前跟蹤點,可實現(xiàn)無修正分割和自適應(yīng)跟蹤,自適應(yīng)跟蹤過程中對簡單場景下的目標(biāo)跟蹤效果較好;對遠(yuǎn)距離孤立小目標(biāo)且與背景有一定灰度對比度時,能穩(wěn)定跟蹤在目標(biāo)由遠(yuǎn)逼近、由小到大的過程中,跟蹤穩(wěn)定;對復(fù)雜場景中的低對比度目標(biāo)有一定的適應(yīng)性,適用范圍較種子點生長更優(yōu)越。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
小讀者(2021年2期)2021-03-29 05:03:48
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創(chuàng)新大賽)(2020年7期)2020-07-27 08:26:32
瘋狂英語·新悅讀(2019年11期)2019-12-18 05:14:16
華人時刊(2019年13期)2019-11-17 14:59:54
NBA特刊(2018年21期)2018-11-24 02:48:04
文苑(2018年22期)2018-11-19 02:54:14
貴州師范學(xué)院學(xué)報(2016年4期)2016-12-01 03:54:07
紅領(lǐng)巾·萌芽(2016年1期)2016-09-10 07:22:44