新型電動四輪農(nóng)用車牽引性能研究*
2022-08-12 02:29:08于斌白錦洋張軍偉左霞王國業(yè)
中國農(nóng)機化學(xué)報 2022年8期
于斌,白錦洋,張軍偉,左霞,王國業(yè)
(1. 北京航天發(fā)射技術(shù)研究所,北京市,100076; 2. 中國農(nóng)業(yè)大學(xué)工學(xué)院,北京市,100083)
0 引言
針對溫室大棚等設(shè)施農(nóng)業(yè)、觀光休閑農(nóng)業(yè)等綠色環(huán)保的新型農(nóng)業(yè)生產(chǎn)方式的快速發(fā)展需要,結(jié)合當(dāng)前電動車輛技術(shù)發(fā)展水平,發(fā)展電動四輪農(nóng)用車輛是合理和可行的選擇,符合未來農(nóng)業(yè)機械電動化發(fā)展趨勢[1]。近幾年,針對電動農(nóng)用車,相關(guān)學(xué)者進行了大量研究。王元杰等[2-3]針對溫室環(huán)境設(shè)計了一種履帶式遙控電動拖拉機,并對整機的各項性能進行了分析和試驗驗證。日本井關(guān)農(nóng)機株式會社與愛媛大學(xué)對改裝的電動拖拉機進行研究,試驗表明電動拖拉機的能耗和碳排放量較傳統(tǒng)燃油拖拉機大幅度降低[4]。高輝松等[5-6]對電動拖拉機的研究表明電動拖拉機具有良好的驅(qū)動性能和經(jīng)濟性能。Bodria等[7]對3 kW交流電機和2 kW直流電機驅(qū)動的兩種電動拖拉機進行了整地試驗,試驗表明電動拖拉機與傳統(tǒng)燃油拖拉性能相近。謝斌等[8]對雙輪驅(qū)動電動拖拉機的傳動性能進行了研究,結(jié)果表明樣機滿足田間作業(yè)要求。
通過對已有研究成果分析,可知:(1)多數(shù)研究基于現(xiàn)有燃油拖拉機結(jié)構(gòu)進行改造設(shè)計,并未結(jié)合電動機特點、特殊作業(yè)環(huán)境進行專業(yè)設(shè)計;(2)相關(guān)研究僅考慮電動農(nóng)用車的動力性等可行性(功能性)分析,忽略了經(jīng)濟性指標對電動農(nóng)用車輛實用性的重要意義;(3)相關(guān)試驗研究多基于試驗臺或定性田間試驗來研究農(nóng)用車輛性能,缺少必要的實車牽引性能試驗。相關(guān)研究也表明,電動車輛仍然存在續(xù)航里程短、作業(yè)時間有限、充電速度慢等問題。而農(nóng)用車輛具有作業(yè)范圍小、整備質(zhì)量大、便于充電等特點,部分彌補了電動車輛的不足,從而,發(fā)揮電動化優(yōu)勢,避免其劣勢。綜上所述,基于電動化特點提出一種新型電動四輪農(nóng)用車動力系統(tǒng)方案,并進行了實車試制、牽引特性研究。
1 整機和動力系統(tǒng)設(shè)計方案
1.1 整機方案
目前電動拖拉機多是基于傳統(tǒng)燃油拖拉機進行的改裝設(shè)計[8-9],存在效率低、空間大、轉(zhuǎn)彎半徑大、地隙不易調(diào)節(jié)等不足,難以滿足溫室大棚等設(shè)施農(nóng)業(yè)、觀光休閑農(nóng)業(yè)生產(chǎn)的需要。因此,針對多種工況及考慮溫室大棚環(huán)境等因素設(shè)計了一種充分發(fā)揮電動化優(yōu)勢的新型電動四輪農(nóng)用車如圖1所示。
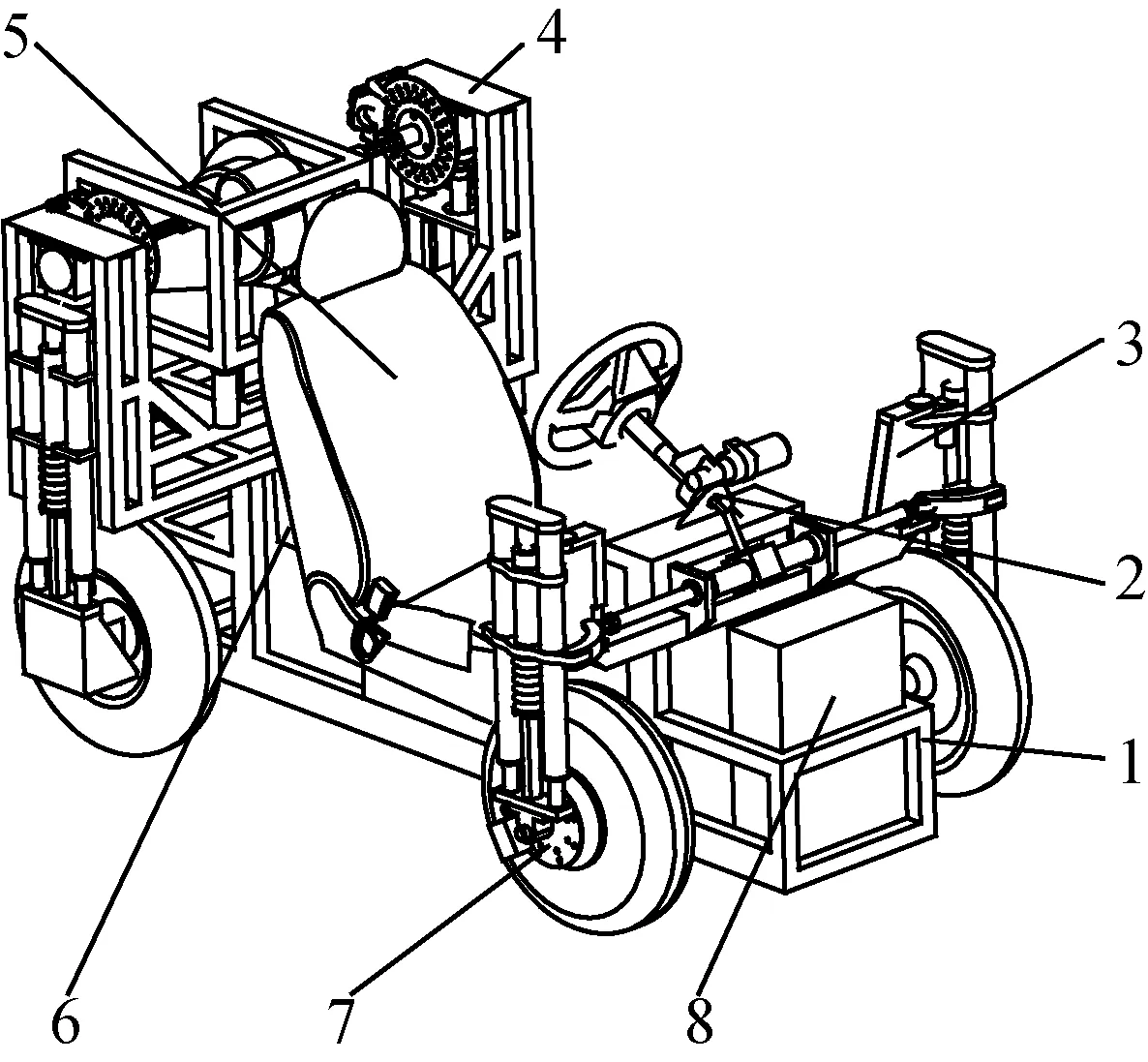
圖1 電動四輪農(nóng)用車簡圖Fig. 1 Schematic diagram of the agricultural vehicle with electric four-wheel drive1.車架 2.轉(zhuǎn)向系統(tǒng) 3.前驅(qū)動橋 4.后驅(qū)動橋 5.座椅 6.電控系統(tǒng) 7.制動系統(tǒng) 8.動力電池
該農(nóng)用車主要由車架、轉(zhuǎn)向系統(tǒng)、前驅(qū)動橋、后驅(qū)動橋、電控系統(tǒng)、制動系統(tǒng)、動力電池等組成。其中,前橋由兩輪轂電機、高度可調(diào)懸架[10]和大角度轉(zhuǎn)向機構(gòu)[11]組成,后橋由中央電機、多檔變速箱及高度可調(diào)懸架組成。該結(jié)構(gòu)方案充分利用了電動化優(yōu)勢,簡化了四驅(qū)傳動系統(tǒng),方便實現(xiàn)前驅(qū)、后驅(qū)和四輪驅(qū)動三種驅(qū)動方式。
1.2 動力系統(tǒng)方案
電動車輛動力系統(tǒng)形式主要有基于中央電機和差速器的兩輪、四輪差速驅(qū)動,基于輪邊電機的兩輪、四輪獨立驅(qū)動等[8],基于中央電機的差速驅(qū)動可實現(xiàn)變速和差速功能[12],具有良好的動力性、經(jīng)濟性;基于輪邊電機的獨立驅(qū)動具有結(jié)構(gòu)簡單、效率高、便于控制等優(yōu)點[13-14]。
依據(jù)電動車輛的特點和農(nóng)用車的性能需求,融合中央電機驅(qū)動和輪邊電機驅(qū)動的優(yōu)點,提出了一種新型組合式電動四輪驅(qū)動形式,如圖2所示。后輪采用中央電機與多檔變速箱結(jié)合的差速驅(qū)動方式,變速箱共設(shè)有3個擋位;前輪采用獨立輪轂電機直驅(qū)方式,可方便實現(xiàn)變速后驅(qū)、前輪直驅(qū)和四輪驅(qū)動三種驅(qū)動方式。

圖2 組合四輪驅(qū)動動力系統(tǒng)方案Fig. 2 Scheme of combined four-wheel drive power system
新型組合式電動四輪驅(qū)動通過不同驅(qū)動方式的組合可滿足農(nóng)用車輛不同作業(yè)工況的需要。(1)在正常田間作業(yè)工況,僅采用后輪驅(qū)動,具有減速、變速功能,可獲得較高牽引功率和牽引效率;(2)當(dāng)遇到較大阻力時,采用四輪驅(qū)動,可提高牽引力,擺脫困境,提高了通過性;當(dāng)需要大角度轉(zhuǎn)向?qū)崿F(xiàn)原地轉(zhuǎn)向時,也可采用四輪驅(qū)動,尤其前輪驅(qū)動,克服較大的轉(zhuǎn)向阻力矩,順利實現(xiàn)轉(zhuǎn)向,提高了機動性;(3)當(dāng)在良好路面行駛時,僅采用前輪高效直接驅(qū)動,達到較高運輸車速。因此,采用新型組合式四輪驅(qū)動形式大大提高了農(nóng)用車輛動力性、經(jīng)濟性、通過性和機動性,充分滿足不同作業(yè)工況下的作業(yè)需要。此外,也為實現(xiàn)實時四驅(qū)、作業(yè)機組動態(tài)匹配等智能控制提供了基礎(chǔ)。
1.3 整機主要技術(shù)參數(shù)
為滿足電動農(nóng)用車的功能,對電動農(nóng)用車的綜合性能參數(shù)進行設(shè)計,如表1所示。

表1 電動四輪農(nóng)用車主要參數(shù)Tab. 1 Main parameters of the agricultural vehicle with electric four-wheel drive
2 牽引作業(yè)動力學(xué)分析
牽引作業(yè)是農(nóng)用車主要作業(yè)方式,牽引性能是其主要動力性能[15]。牽引性能為車輛縱向動力學(xué)性能,可簡化為兩輪模型[16]。簡化得到電動四輪農(nóng)用車動力學(xué)模型如圖3所示,動力學(xué)方程[17-18]
G=2Z1+2Z2
(1)
FT+2Ff1+2Ff2=2Fq1+2Fq2
(2)
FTH+2Z1(a+b+a1)+2Z2a2=Ga
(3)
式中:G——整車重量,N;
Z1——地面對單個前驅(qū)動輪垂直方向反力,N;
Z2——地面對單個后驅(qū)動輪垂直方向反力,N;
FT——牽引力,N;
Ff1——前輪單輪滾動阻力,N;
Ff2——后輪單輪滾動阻力,N;
Fq1——單個前輪驅(qū)動力,N;
Fq2——單個后輪驅(qū)動力,N;
H——后牽引點距離地面高度,m;
a——重心在水平方向上到后軸的距離,m;
b——重心在水平方向上到前軸的距離,m;
a1——前驅(qū)動輪的滾動阻力系數(shù);
a2——后驅(qū)動輪的滾動阻力系數(shù)。
驅(qū)動力和滾動阻力滿足
Fq1=Z1φ1
(4)
Fq2=Z2φ2
(5)
Ff1=Z1a1/rq1=Z1fq1
(6)
Ff2=Z2a2/rq2=Z2fq2
(7)
式中:φ1——前驅(qū)動輪對地面附著系數(shù);
φ2——后驅(qū)動輪對地面附著系數(shù);
rq1——前驅(qū)動輪動力半徑,m;
rq2——后驅(qū)動輪動力半徑,m;
fq1——前驅(qū)動輪滾動阻力系數(shù);
fq2——后驅(qū)動輪滾動阻力系數(shù)。
電動農(nóng)用車的牽引功率
Pq=FTv
(8)
式中:Pq——電動農(nóng)用車的牽引功率,W;
v——整車行駛速度,m/s。
電動農(nóng)用車的輸入功率按電機輸入功率計算
Pi=UI
(9)
式中:Pi——電動農(nóng)用車的輸入功率,W;
U——電動農(nóng)用車輸入電壓,V;
I——電動農(nóng)用車輸入電流,A。

圖3 電動四輪農(nóng)用車受力分析圖Fig. 3 Force analysis diagram of the agricultural vehicle with electric four-wheel drive
為全面評價電動農(nóng)用車的牽引工作效率,采用電機輸入功率Pi作為牽引輸入功率,在水平地面作業(yè)時發(fā)揮的牽引功率Pq作為輸出功率,整機牽引效率見式(10),該牽引效率包含了電機效率,因此本文以下按此式測算牽引效率,區(qū)別于通常內(nèi)燃機車輛牽引效率[19]。
ηT=Pq/Pi×100%
(10)
前后驅(qū)動輪滑轉(zhuǎn)率
δ1=(v1-v)/v1×100%
(11)
δ2=(v2-v)/v2×100%
(12)
式中:δ1——前驅(qū)動輪滑轉(zhuǎn)率;
δ2——后驅(qū)動輪滑轉(zhuǎn)率;
v1——根據(jù)前輪轉(zhuǎn)速計算得到的車速,m/s;
v2——根據(jù)后輪轉(zhuǎn)速計算得到的車速,m/s。
3 牽引性能試驗
電動農(nóng)用車牽引性能試驗系統(tǒng),如圖4所示。試驗地點為柏油路,試驗道路平坦,天氣晴朗,無風(fēng)。試驗負荷車采用ISEKI TS1910型號拖拉機,被試車輛為自主設(shè)計電動四輪農(nóng)用車,技術(shù)參數(shù)見表1。被試車輛搭載了自行開發(fā)的實時數(shù)據(jù)采集系統(tǒng),傳感器安裝和采集信號如圖4所示。

圖4 電動四輪農(nóng)用車牽引性能試驗系統(tǒng)Fig. 4 Traction performance test system of the agricultural vehicle with electric four-wheel drive
車輛作業(yè)時主要采用后輪驅(qū)動和四輪驅(qū)動兩種驅(qū)動方式,因此牽引試驗分后輪驅(qū)動1、2、3擋和四輪驅(qū)動1、2、3擋共6組,每組重復(fù)進行3次。對試驗結(jié)果進行數(shù)據(jù)處理分析,如表2所示。
由表2后輪驅(qū)動牽引試驗結(jié)果可知:(1)后輪驅(qū)動1、2、3擋隨車速增加牽引力下降,符合車輛動力性規(guī)律。1擋時發(fā)揮整車最大牽引力1 925 N,3擋時整車最高車速約為10 km/h;隨著牽引力增大,滑轉(zhuǎn)率隨之增加,1擋最大牽引功率點,滑轉(zhuǎn)率約為16%,2擋最大牽引功率點,滑轉(zhuǎn)率約為11%,3擋最大牽引功率點,滑轉(zhuǎn)率約為5%。(2)1、2擋滑轉(zhuǎn)率較大,因此牽引效率有所降低,最高效率點出現(xiàn)在3檔,約為74%,該效率包含電機效率。(3)3擋最大牽引功率點和最高牽引效率點基本一致,因此匹配此類動力需求的作業(yè)機具作業(yè)時可充分發(fā)揮本機動力性、經(jīng)濟性。

表2 后驅(qū)及四驅(qū)各擋牽引特性Tab. 2 Traction characteristics of rear-wheel drive and four-wheel drive
由表2四輪驅(qū)動牽引試驗結(jié)果可知:(1)各擋車速和牽引力變化規(guī)律與后驅(qū)基本一致。1擋時發(fā)揮整車最大牽引力2 120 N,3擋時整車最高車速約為9.5 km/h。1擋最大牽引功率點,前軸滑轉(zhuǎn)率約為17%,2擋最大牽引功率點,前軸滑轉(zhuǎn)率約為12%,3擋最大牽引功率點,前軸滑轉(zhuǎn)率約為9%。(2)各擋牽引效率和牽引功率較后驅(qū)有所降低。通過滑轉(zhuǎn)率比較可知,各擋滑轉(zhuǎn)率較后驅(qū)有所增大,四驅(qū)前輪滑轉(zhuǎn)率高于后輪滑轉(zhuǎn)率,且整機負荷率較低,因此整車綜合牽引效率和牽引功率有所下降。為便于大角度轉(zhuǎn)向本車前輪采用輪轂電機直接驅(qū)動,輪速較高是導(dǎo)致前輪滑轉(zhuǎn)率較高的主要因素。因此在正常作業(yè)工況下選擇后驅(qū)較四驅(qū)更為合理。(3)四驅(qū)1擋時,發(fā)揮整車最大牽引力,因此,當(dāng)機組作業(yè),出現(xiàn)較大阻力時,可采用四驅(qū)1擋提高牽引力,使車輛擺脫臨時困境。
對比四輪驅(qū)動和兩輪驅(qū)動牽引特性可知,在整機配置及工況相同情況下,正常作業(yè)時,采用后輪驅(qū)動匹配對應(yīng)動力需求的作業(yè)機具作業(yè)時,具有良好動力性、經(jīng)濟性;當(dāng)遇到較大阻力,后輪出現(xiàn)嚴重滑轉(zhuǎn)時,采用四輪驅(qū)動能夠發(fā)揮最大牽引力,使車輛擺脫臨時困境,提高了通過性;因此綜合利用幾種驅(qū)動方式,可適應(yīng)不同的作業(yè)工況。
根據(jù)電機額定功率點和最大牽引效率點主要性能參數(shù),對后驅(qū)1、2、3擋電機負荷特性和整機牽引性能的關(guān)系進行比較,見表3。在電機額定功率點,電機效率較高,后驅(qū)3擋牽引效率最高,在最大牽引效率點,后驅(qū)3擋電機負荷率最大,因此進一步說明后驅(qū)3擋匹配對應(yīng)動力需求的作業(yè)機具可獲得良好性能。

表3 后驅(qū)各擋電機額定功率點和最大牽引效率點主要性能參數(shù)Tab. 3 Main performance parameters of rated power and maximum traction efficiency of rear wheel drive
4 經(jīng)濟性分析
采用單位耕作面積能量消耗和成本作為指標評價電動四輪農(nóng)用車的經(jīng)濟性,以每公頃農(nóng)田作業(yè)需要的有用功Q計算。
1) 電動四輪農(nóng)用車使用成本估算。電動四輪農(nóng)用車牽引作業(yè)能量利用效率
(13)
式中:Q——每公頃農(nóng)田作業(yè)所需有用功,kW·h;
QM——每公頃農(nóng)田作業(yè)所需電量,kW·h;
ηc——電池充電效率,鋰電池約為0.911 9[20];
ηb——電池放電效率,在1C倍率放電下值為0.982 9[21];
ηT——電動四輪農(nóng)用車牽引效率,試驗測得最大牽引效率為0.74。
每公頃農(nóng)田牽引作業(yè)的用電總費用
YM=QMXM
(14)
式中:XM——某地區(qū)用電單價,元/(kW·h)。
2) 電池成本估算。為估計電池成本,忽略電池的損耗。
(15)
(16)
式中:YB——農(nóng)田作業(yè)的電池成本,元/hm2;
YZ——電池組購買總費用,元;
N——電池總充放電次數(shù);
T——每次充滿電后農(nóng)田作業(yè)總時間,h;
B——農(nóng)田作業(yè)幅寬,m;
vm——本機最大牽引效率時作業(yè)速度,5.54 km/h;
Ue——電池額定電壓,V;
Cn——電池額定容量,Ah;
Pim——最大牽引效率時輸入功率,kW。
因此,每公頃農(nóng)田作業(yè)時電動農(nóng)用車的總費用
(17)
3) 傳統(tǒng)燃油拖拉機使用成本計算。傳統(tǒng)燃油拖拉機牽引作業(yè)能量利用效率
(18)
式中:QE——作業(yè)需要的燃料總量,(kW·h)/hm2;

每公頃農(nóng)田牽引作業(yè)的總費用
(19)
式中:be——有效燃油消耗率[22],g/(kW·h);
ρ——柴油密度,其值為0.84 g/mL;
XE——某地區(qū)柴油機單價,元/L。
以中耕作業(yè)計算每公頃需要的有用功Q,中耕作業(yè)幅寬B的確定[23]
(20)
式中:η——利用系數(shù),取為0.85~0.95;
FT——最大牽引效率對應(yīng)牽引力,1 050 N;
P′——中耕比阻,N/m,用窄松土鏟進行深松土?xí)r最大比阻為480 N/m[23]。
每公頃中耕作業(yè)需要的有用功
(21)
(22)
式中:t——中耕作業(yè)需要的時間,h/hm2。
由式(21)、式(22)得
(23)
由此,得到電動四輪農(nóng)用車與傳統(tǒng)燃油拖拉機的對比參數(shù)表,如表4所示。

表4 電動四輪農(nóng)用車與傳統(tǒng)燃油拖拉機參數(shù)表Tab. 4 Parameter list of the electric agricultural vehicle and traditional tractor
通過電動四輪農(nóng)用車與傳統(tǒng)燃油拖拉機的經(jīng)濟性對比分析,可知,中耕作業(yè)時,電動四輪農(nóng)用車單位面積能量消耗降至傳統(tǒng)燃油拖拉機能量消耗的42.4%,單位面積成本費用降至傳統(tǒng)燃油拖拉機的80.1%。據(jù)統(tǒng)計,近幾年鋰電池價格以每四年24%的趨勢下降,而0號柴油價格以每年8%的趨勢上升[25],因此,電動四輪農(nóng)用車較傳統(tǒng)燃油拖拉機在能量利用效率和使用費用方面都有較大優(yōu)勢,并逐年擴大。所設(shè)計電動四輪農(nóng)用車主要應(yīng)用在溫室大棚等設(shè)施農(nóng)業(yè)中,因此,可采用插電方式,使費用進一步降低,而燃油車輛還會有加油往返消耗,因此,電動農(nóng)用車更具綜合經(jīng)濟性優(yōu)勢。同時電動車輛的零排放也避免了溫室尾氣污染。
5 結(jié)論
綜上所述,通過對電動四輪農(nóng)用車整機和動力系統(tǒng)方案設(shè)計、牽引性能及經(jīng)濟性研究,得出以下結(jié)論。
1) 設(shè)計的新型電動四輪農(nóng)用車,后驅(qū)3擋時牽引效率和電機負荷率最高,通過匹配對應(yīng)動力需求的作業(yè)機具可獲得良好的牽引性能和經(jīng)濟性;四驅(qū)1擋時能夠發(fā)揮最大牽引力。
2) 根據(jù)電動農(nóng)用車需求,提出的前輪獨立輪轂電機驅(qū)動、后輪中央電機差速驅(qū)動的動力系統(tǒng)方案,通過綜合利用后驅(qū)、四驅(qū)、前驅(qū)多種驅(qū)動方式,并與對應(yīng)動力需求的作業(yè)機具匹配,可在不同作業(yè)工況下獲得良好動力性、經(jīng)濟性、通過性和機動性。
3) 中耕作業(yè)工況下電動四輪農(nóng)用車單位面積能量消耗降至傳統(tǒng)燃油拖拉機能量消耗的42.4%,單位面積成本費用降至傳統(tǒng)燃油拖拉機的80.1%。同時,電動農(nóng)用車具有用電方式靈活,溫室內(nèi)零排放等優(yōu)點。因此,電動四輪農(nóng)用車相比傳統(tǒng)燃油拖拉機具有良好的動力性、經(jīng)濟性、節(jié)能環(huán)保等優(yōu)勢。隨著技術(shù)的成熟和成本的進一步降低,農(nóng)用車輛電動化將成為必然趨勢。
猜你喜歡
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
甘肅教育(2020年14期)2020-09-11 07:57:42
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
故事大王(2016年7期)2016-09-22 17:30:08
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛(wèi)生(2014年11期)2014-11-12 13:11:32
兒童故事畫報(2013年3期)2013-06-24 05:40:30
- 中國農(nóng)機化學(xué)報的其它文章
- 可持續(xù)生計視角下農(nóng)村精準扶貧成效鞏固提升研究*
——以新疆喀什地區(qū)X縣為例 - 我國三大平原玉米生產(chǎn)布局變遷分析*
——基于政策變化視角 - 碳中和愿景下異質(zhì)性農(nóng)戶綠色生態(tài)農(nóng)業(yè)技術(shù)采納意愿研究*
——基于西部典型農(nóng)牧區(qū)對比分析 - 鞏固拓展脫貧攻堅成果與鄉(xiāng)村振興有效銜接研究*
——以貴州省為例 - 農(nóng)機社會化服務(wù)對農(nóng)民種糧積極性的影響研究*
- 農(nóng)機社會化服務(wù)對土地規(guī)模經(jīng)營的影響*
——基于服務(wù)外包和供給的雙重視角