水下檢測技術在巖塞爆破工程中的應用研究
2022-08-10 06:29:44崔翼飛汪小江
西北水電 2022年3期
關鍵詞:設計
任 遠,崔翼飛,汪小江
(1.中國電建集團西北勘測設計研究院有限公司,西安 710065;2.華能瀾滄江水電股份有限公司里底水電廠,云南 維西 674606)
0 前 言
中國在20世紀70年代初期,為修建引調水工程開挖進水洞,在水庫或湖(海)底部的臨水側,預留一定厚度的巖體,即為巖塞。巖塞具有擋水的作用,能保證背水側的隧洞采用干地法施工,待背水側的隧洞完建或擋水永久閘門竣工且不影響后面隧洞施工,一次性水下爆除巖塞形成進水洞。巖塞爆破是爆破施工的一種特殊形式。巖塞爆破有洞室爆破、鉆孔爆破和組合爆破等3種常見的方法。其中洞室爆破法又分為集中藥室洞室爆破法和條形藥室洞室爆破法;而鉆孔爆破法又包括深孔和炮孔爆破法2種(孔徑D>75 mm且孔深h>4 m的稱為深孔,小于以上數值的稱為炮孔);組合爆破就是基于上述方法相互結合爆破施工。組合爆破有的前部分用洞室爆破,后部分用鉆孔爆破,有的以洞室爆破為主,鉆孔爆破為輔。
目前,我國的巖塞爆破技術雖然在勘察設計、爆破計算、爆破試驗、火工材料和施工等方面都取得了較大進步,但依然存在進水洞成型偏差和穩定性等問題。本文針對某水庫排沙洞工程巖塞爆破后進水洞水下檢查,研究水下檢測技術原理,并探索和實踐深水層有限空間內水下檢查的有效方法,解決遇到的實際困難,為巖塞爆破工程后評價及進水洞正常運營維護提供水下信息。
1 工程概述
某水庫排沙洞工程“一洞兩用”,汛期泄洪排沙,非汛期引流發電。排沙洞工程由進水洞、排沙洞和發電支洞3部分構成。進水洞位于水庫主河道左岸,巖塞位于水面以下約70 m,開口正對右岸支流的匯入口。巖塞的設計厚度為12.3 m,巖塞頂部為橢圓形,設計尺寸27.84×20.3 m(長軸×短軸);巖塞底部為圓形,設計內徑10 m,設計進洞中軸線與水平面夾角45°。
進水洞由巖塞體、鎖口、高邊墻、集碴坑、反坡段,平緩坡段和事故檢修閘門等水工建筑物組成。巖塞底部緊挨圓形鎖口,鎖口內徑10 m,為鋼筋混凝土襯砌結構。鎖口緊連集碴坑,集碴坑頂部為反坡洞身,集碴坑前端是高邊墻,反坡段接平緩坡段,平緩坡段至事故檢修閘門結束。巖塞入口距事故檢修閘門121.29 m,集碴坑的長度56.4 m,底板高程1 637.00 m。進水洞的縱向布置見圖1。

圖1 某排沙洞工程進水洞的水工建筑物縱向布置
該進水洞巖塞爆破施工采用組合法,巖塞頂部采用鉆孔爆破預裂,底部采用洞室爆破。鉆孔采用高精度三維鉆孔跡線定位,藥室采用陀螺式分布,爆破施工次序為覆蓋層擾動、巖塞預裂成型、爆除巖塞、覆蓋層再次擾動和沖水下泄[1]。巖塞爆通后排沙洞和發電洞已正常運營6 a,已取得了顯著的社會和工程效益,但鑒于深水層有限空間水下檢查的困難,對巖爆工程及進水洞竣工后評價一直久拖未決。排沙洞和發電支洞可以關閉事故檢修閘門,排空檢查;而進水洞未修建事故檢修閘門,無法排空檢查。修建圍堰或抽干水庫檢查,造價極高,不可行;潛水員下潛洞內檢查,安全性差。
經過多年的海洋自然資源開發利用,推進了水下檢測技術迅速提升[2]。多波束測深系統掃描和水下機器人探查等檢測技術日臻完善,為解決巖塞爆破后進水洞水下檢測提供了思路。
2 存在的主要問題
巖爆后水下檢測進水洞存在問題如下:
(1) 高速高壓過流。巖爆后洞內水流一直是高速高壓過流,無法作業。
(2) 能見度低。深水層洞內光線本身弱,含泥沙的渾流能見度更低。
(3) 風險較高。水深約70 m,超過潛水員安全下潛60 m的允許值。
(4) 定位困難。封閉洞室空間無法衛星定位或常規儀器定位,鋼筋混凝土襯的洞壁形成特有的地場,干擾指南針或陀螺儀定向。定位僅能岸上依靠監控圖像、圖紙或纜繩,粗略判斷。
(5) 潛行困難。封閉洞室空間有限,水下洞室工況復雜,洞壁障礙物、水中雜物和洞底淤積物等不明物體,易阻礙潛水員或潛航器潛行。
3 水下檢測技術原理
潛水員水下檢查是潛水員攜帶量具或攝影機靠近待檢目標直接勘察作業,并配合陸上工程技術人員通過攝像監控系統實現安全監控[3]。其原理是水下抵近直接目視檢查。
多波束測深系統是現代信號處理技術、高分辨顯示技術、高精度導航定位和3D成像等多傳感器的集成,有波束換能器陣、RTK衛星定位、姿態傳感器和數據采集處理等4部分組成,多波束測深系統掃描又被稱為“水下CT”技術[4]。
多波束工作原理見圖2。換能器陣列向目標區域發射一個垂直于航跡的扇形波束,接收換能器陣列接收目標區域回波信號,沿著與航跡垂直的方向形成幾十個或幾百個窄波束,獲得距離和相位差等關鍵參數,經過數字信號處理,獲取水下結構的空間坐標和圖像信息,并實時3D成像。

圖2 多波束工作原理
水下機器人檢查是操作手在地面遙控潛水器完成水下探查任務。其原理是遙控潛行器間接水下檢查。水下機器人分為有纜遙控潛水器(ROV)、無纜潛水器(AUV)和復合型潛水器(ARV)。ROV技術應用成熟,應用較廣;AUV受限于水下長期供電、定位、通訊和載荷等技術尚未發展成熟,應用范圍較窄[5]。
4 檢測方法比較
潛水員水下檢查優點是檢測成果直接可靠,可清淤后進行局部精細檢查;缺點是在水體能見度低或深水急流時無法作業。即便是控制水流,水體能見度高,但深水層洞室潛水員作業,作業范圍受限,檢測效率低。何況洞室水深已達70 m,超過潛水員60 m的安全作業深度,采用潛水員水下檢查的方法不適合。
ROV水下檢查優勢是可根據預定航線進行巡檢,能達到人工不方便到達的深度和肉眼難以企及的精度進行檢查,并以先進的圖像識別和圖像回傳技術實現水下穩定地檢查分析[6],ROV拍攝影像分辨率較高,無人身風險;缺點是在急流或旋渦水體下無法作業,潛行易發生纜線纏繞,存在丟失設備的風險。AUV水下檢查尚在未發展成熟階段,無纜水下定位和水通訊技術尚未突破瓶頸,進水洞內AUV水下檢查更不可行。
多波束水下檢查的優點是掃測覆蓋面積大,作業高效,可實時三維成像檢查,適宜于衛星信號覆蓋良好、大面積的水域測量。多波束采集高密度水下地形點云,構建的點云圖形細膩、紋理表現豐富,能精細地反映水下的地形地貌[7];缺點是受限于衛星信號,僅能在衛星信號覆蓋良好的區域作業。水下檢測常用的3種方法分析結果見表1。

表1 巖爆后進水洞水下檢測擬采用的3種方法比較
綜合上述分析,潛水員下潛進水洞水下檢查顯然不適宜,多波束測深系統掃描聯合ROV水下檢查進水洞較為適宜。
5 水下聯合檢測技術的工程應用
5.1 總體方案
進水洞的水下檢查擬采用多波束測深系統掃描聯合ROV水下檢查的技術方案。多波束測深系統掃測巖塞開口及進洞口附近河床,ROV水下探查整個進水洞。在洞內經補光能見度清晰時,ROV直接錄制視頻或拍照檢查;洞內經補光能見度仍較弱時,ROV搭載近距離聲吶掃測洞壁。集碴坑淤積測量,設計使用ROV搭載深度計測量。
5.2 設備選型
5.2.1多波束測深系統選型
多波束測深系統的精度取決于其定位、聲吶、姿態校正和聲速校正等4個子系統的測量精度,系統選型參考的相關技術參數如下:
RTK定位設備,水平位置精度應滿足±10 mm,高程精度應滿足±20 mm;測深分辨率,應滿足±3 cm,最大測深量程應達到150 m;姿態傳感器的航向和橫滾俯仰動態測量精度應滿足0.1°,分辨率應滿足0.01°,升沉橫擺總擺渡測量精度應滿足±5 cm;聲速測量精度應滿足±0.006 m/s,其分辨率應滿足0.001 m/s。
5.2.2ROV水下機器人選型
ROV選型應考慮便攜性、密封性、搭載能力、抗流能力、負載能力、燈光亮度、通訊方式、供電方式和輔助設備等[8]。其選型參考的主要技術參數如下耐壓深度應滿足100 m,電纜長應大于150 m,抗流應滿足2 m/s,攝像頭分辨率應至少達到1080P(200萬像素);圖像聲吶儀的最大量程應達到20 m,距離分辨率應滿足±3 cm;360°避碰聲吶儀測程應滿足15 cm~200 m,5 m范圍內距離分辨率滿足±2 mm,5 m以上應滿足±10 mm;慣導定位精度應滿足測程的2‰;測深計測深精度應滿足±10 cm。
5.3 關鍵技術設計
5.3.1多波束工作平臺搭建
船的穩定性影響測深精度,大而重的鐵船穩定性強,但對內陸河道而言,大船不僅在轉彎調頭時靈活性差,而且在淺水域無法航行。橡皮艇靈活性強,適宜于淺水或深水域航行,但穩定性稍弱。水庫河床需多波束測深系統多航線掃測,橡皮艇作業較方便。為增加橡皮艇的穩定性,又方便多波束數據采集,設計加工了用于橡皮艇上的多波束測深系統工作平臺(見圖3和圖4)。

圖3 搭建的多波束測深系統工作平臺

圖4 多波束測深系統工作平臺結構
工作平臺使用角鋼、槽鋼和木板等材料加工而成。其主體分為左舷框、右舷框、橫桿和木板4部分。左舷框位于橡皮艇左側,圖4中立面ABCD為左舷框的安裝位置,OP為槽鋼位置;右舷框位于橡皮艇右側,圖4中立面A1、B1、C1、D1為右舷框的安裝位置;橫桿連接橡皮艇兩側左右舷框,圖4中DD1、FG和EH為橫桿安裝的位置;木板位于主體框架的中部,圖4中平面EFGH為木板的安裝位置。
設計加工的該工作平臺方便拆卸或安裝,自重約35 kg。工作平臺能實現多波束換能器垂直安裝,保持RTK相位中心和換能器聲波發射中心在同一條鉛錘線上。搭建工作平臺時,換能器安裝在噪聲低且氣泡少的橡皮艇中部位置,光纖羅經安置在能靈敏反映船和換能器姿態的工作平臺的中部位置。
5.3.2航線設計
航線設計目的是控制多波束測點的分布和密度。測點密度與航線間距、波束開角和水深等相關。航線間距小,重復掃測面積大,測點密。波束開角越小,測點越密,但掃測寬度窄。航線布設應平行水流方向,主航線間距應不大于0.8倍的掃測帶寬,重要航線間距應不大于0.5倍掃測帶寬,檢查航線應垂直于主航線布置[9],對重要部位應加密布置航線。主河道平均深度約40 m,河面寬約150 m,設計航間距20 m;支流平均深度約23 m,河面寬約130 m,設計航間距15 m。加密航線精掃巖塞開口,設計航線間距2 m。
5.3.3掃穿巖塞底部的設計
精掃巖塞開口,受洞口的限制,測量船位置或波束開角不佳,波束不可能掃穿巖塞底部。解決這一問題方法有3種:第一種方法是傾斜45°安裝多波束換能器,盡量保持換能器中心發射聲波線剛好與進洞中線重合,大量波束穿越掃測巖塞底部;第二種方法是選用有側掃功能的多波束測深系統,傾斜發射波束,設置波束偏角(0°~60°可調),側掃巖塞底部;第三種方法是測量船航行于最佳位置,調整相應的波束開角,掃穿巖塞底部。第一種方法需要加工多波束探頭傾斜支架,并需要對傾斜安裝的多波束測深系統進行校準改正[10],實施起來較為不便,建議使用第二種方法或第三種方法。圖5是掃穿巖塞底部測量船的位置分析剖面圖,圖中A、B、C、D為設計巖塞縱剖面的4個頂點,AB為設計巖塞底部圓直徑,CD為設計巖塞頂部橢圓的長軸。E、F、G、H、I和J等六點為水面線上多波束聲吶探頭的位置,A、D和E三點共線,B、C和J三點共線。其中EA∥FB,GA∥HB,IA∥JB,GA和HB,AG和BH都⊥CD。

圖5 掃穿巖塞底部測量船的位置分析剖面
圖5中共用AB邊形成的ABFE、ABHG和ABJI 3個梯形所在水域是精掃巖塞開口測量船應在的最佳位置區。在這3個梯形水域內,只要存在平行于相應梯形上底或下底的發射聲波,波束就能掃穿巖塞底部。依據工作水位、水深和巖塞的設計參數,計算出EA、HB和JB 3條發射聲波所對應的多波束開角分別為8.2°、90°、161.8°,又多波束的波束開角一般在0°~160°內可調,因此,測量船行至最佳位置水域,分別可設置8.2°、90°和160°的波束開角掃測巖塞開口。基于上述分析,掃穿巖塞底部設計如下:
(1) RTK放樣洞口位置,航線間距2 m,航向垂直于水流方向掃測。
(2) RTK導航,測量船在最佳位置水域,分別設置8.2°、90°和160°波束開角,精掃巖塞開口。或固定波束開角8.2°,調整波束偏角至45°,傾斜側掃。
5.3.4ROV洞內檢測設計
ROV洞內檢查工況復雜,應全面考慮各種不利因素,設計如下:
(1) 在枯水期發電支洞機組停機且靜水的狀態下,實施ROV洞內檢查。
(2) ROV抽檢作業,沿斷面線錄制視頻。先沿進水洞底板中軸線和兩側邊墻與底板的交接線錄視頻,再每間隔10 m錄制進水洞橫斷面視頻。
(3) 對巖塞段、集碴坑和反坡前端等受巖爆影響大的部位詳細檢查。
(4) 洞內定位,根據ROV纜線進深和水下建筑物影像特征,并結合施工圖紙判斷粗略定位或ROV搭載抗干擾能力強的光纖羅經定位。
(5) ROV搭載強光燈水下補光,并備用1臺可搭載的近距離聲吶。
(6) 為防ROV掛機風險,設計備用2臺有機械手的救援ROV。
5.4 應 用
按照上述設計方案,分兩階段實施巖爆后進水洞的水下檢查。
2020年5月,第一階段先施測了水下檢測專用GPS控制網,后使用R2SONIC2024多波束測深系統(見圖6),掃測了洞口附近河床,并精掃了巖塞開口。多波束掃測使用QINSy軟件,數據處理使用Caris10.1后處理軟件。聲速儀測量了代表水域的聲速,并觀測了工作水位。對多波束采集數據,進行了降噪、剔錯和改正等后處理。培訓ROV操作,探查了洞口附近河床的淤積情況。

圖6 R2SONIC2024多波測深系統組成
2020年12月,第二階段使用潛鮫P200輕型ROV(見圖7)在發電機組停機且靜水的狀態下檢查了進水洞。ROV沿斷面線錄制了洞內視頻,并詳細檢查了巖塞開口、集碴坑和反坡前端。
6 檢測成果分析
從水下檢測成果精度、洞口河床穩定性、巖塞開口、集碴坑淤積、襯砌段混凝土表觀質量和工作效率等方面,分析設計的水下聯合檢測技術的應用效果。
6.1 精度分析
6.1.1GPS控制網精度
GPS控制網的最弱基線邊的相對中誤差為1/205070,最弱點平面位置中誤差為±0.9 mm,GPS擬合高程精度為10.2 mm。GPS控制網平面位置精度滿足四等GPS平面控制網的精度要求,實地檢查GPS擬合高程,滿足五等高程。
6.1.2多波束測點精度
使用R2SONIC2024多波束測深系統的定位設備在3個已知控制點進行了1 h靜態校測,最大平面位置較差8 mm,最大高程較差17 mm。對比統計分析單波束和多波束重合點的測深精度見表2。

表2 單波束和多波束重合點測深精度分析表
表2可看出深度越大測深偏差區間也越大,但在60 m深度以內單波束與多波束較差均小于0.3 m。按 JTS 131—2012《水運工程測量規范》規定測深偏差的允許值為 2 倍測深誤差[11],抽檢重合點的測深偏差均小于允許值,說明多波束測點精度可靠。
6.1.3多波束影像的分辨率
多波束測深的分辨率不是檢測目標的多波束影像辨率,多波束的影像分辨率與船速、發射頻率、水深、波束開角和測點密度等相關[12]。多波束掃測前,在淺水區比較驗證了多波束3D影像的分辨率。圖8、9是試驗掃測的臺階和巖縫的3D影像,圖中可明顯看出臺階輪廓線和巖縫線。實際量測臺階和巖縫的寬度與3D影像量測的較差均在10 mm以內,可見在淺水區多波束3D影像的分辨率能達毫米級。精掃的巖塞開口多波束影像(見圖10),鎖口圓形輪廓線隱約可見,依據經驗推測60 m深的多波束3D影像分辨率能達厘米級。
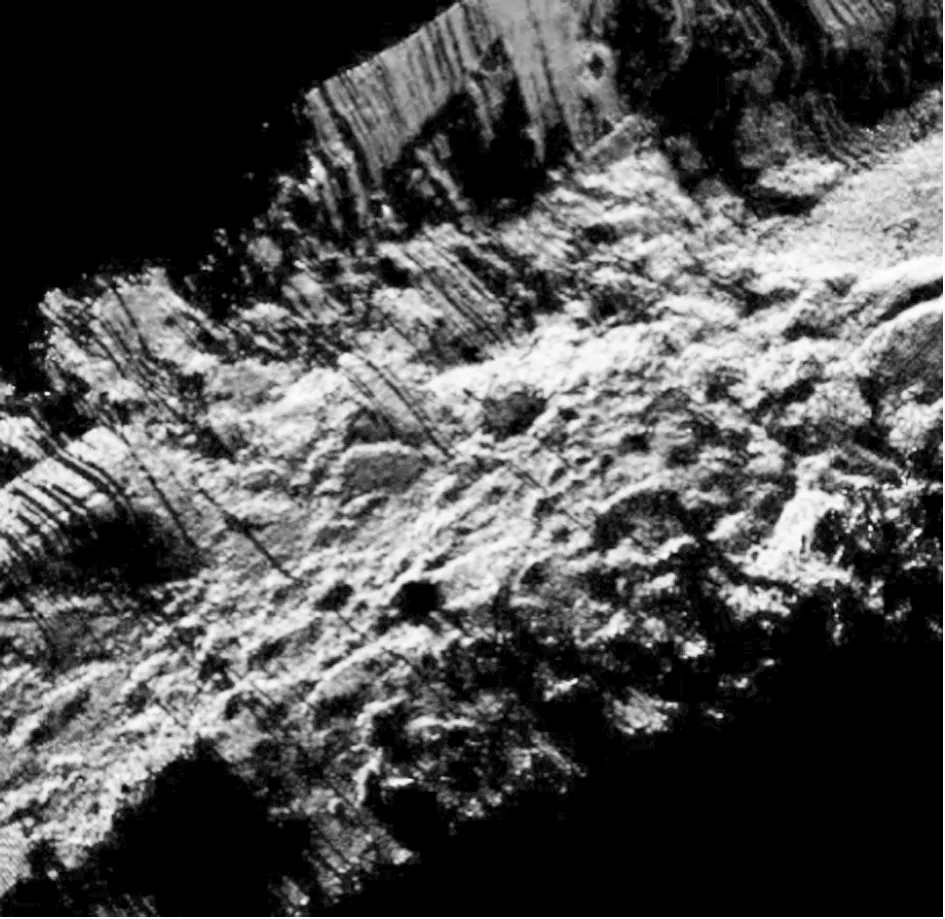
圖9 水下約6 m處巖石縫影像

圖10 洞口附近河床多波束3D影像
6.1.4ROV影像的分辨率及深度計測量的精度
潛鮫P200輕型ROV搭載數碼相機的像素為300萬,采取補光的措施ROV拍攝的洞壁影像施工縫隙清晰,深70 m ROV影像的分辨率能到達3 mm。對比繩探和ROV深度計測量事故檢修閘門底板深度的偏差為8.8 cm,小于10 cm允許值,可見深度計測深的精度可靠。
6.2 洞口河床的穩定性
圖10是洞口附近河床的多波束3D影像,深藍位置為進洞口,洞臉為70°巖質陡坡,陡坡頂有一棄渣臺,輸沙槽特征地貌明顯。這種地貌特征的河床,易失穩。汛期泄洪排沙,非汛期發電洞引流發電,水位和水流經常變動。運營發電期水位和流速相對穩定,來流加裹沙石等淤積物能力低,一部分淤積物在洞口附近河床淤積,一部分被帶向洞內。汛期開啟泄洪閘門,來流加裹大量泥沙等淤積物沖入輸沙槽,同時洞口河床的部分沉積物被再次激起一起帶向洞內。如此反復,洞口附近河床始終處于一種動態的相對平衡。另外,洞頂棄渣臺本身穩定性差,在洞口來流的激蕩沖刷下,部分失穩的渣塊會時常滑落洞口。
6.3 巖塞開口情況
圖11是巖塞開口的多波束3D影像,洞口整體呈“喇叭”形,紅色虛框內可見深藍色的圓是鎖口輪廓線,3D影像圖洞穴的最低點在高程1 661.56 m,小于設計巖塞底部中心點高程1 664.48 m,證實多波束已掃穿巖塞底部。3D影像圖量測鎖口內徑約8.8 m,小于10 m的設計內徑。量測巖塞頂部近似橢圓形的開口尺寸為24.5×21.7 m(長軸×短軸),略小于27.84×20.3 m(長軸×短軸)的設計尺寸。

圖11 巖塞開口多波束3D影像
觀察巖塞開口的多波束影像,巖壁紋理褶皺不平,巖棱凸出且縫隙分明,鎖口交接部有凸起巖塊。觀察ROV錄制巖塞開口的視頻及水下照片,與多波束3D影像觀察的特征基本一致。
6.4 集碴坑淤積情況
深度計測量集碴坑淤積的平均高程1 651.90 m,小于集碴坑頂部1 653.70 m的設計高程,集碴坑尚未淤積滿。集碴坑平均淤積厚度約14.9 m,落水點最低高程為1 648.80 m。圖12是進水洞底板中線縱斷面,紅色曲線是測量的進水洞底板中線縱斷面,藍色曲線是設計進水洞底板中線縱斷面。在混凝土襯砌段測量的縱斷面線與設計斷面線基本重合,在巖塞開口因巖爆的不確定性兩條斷面線不重合。

圖12 進水洞底板中線縱斷面
6.5 襯砌段混凝土表觀質量
觀察在混凝土襯砌段ROV錄制的視頻,在集碴坑高邊墻、反坡的前端及兩側邊墻混凝土表面破損明顯,多為裸露鋼筋及露骨料現象。距巖爆位置越近的襯砌混凝土表面破損程度越高,越遠破壞程度越低。洞頂的混凝土表面質量,明顯好于底板和兩側墻。巖爆雖對襯砌混凝土表面有局部破壞,但不影響鋼筋混凝土襯混凝土層對洞壁的整體保護功能。圖13、14是ROV拍攝有質量缺陷的照片。

圖13 集碴坑高邊墻混凝土露骨料

圖14 反坡段邊墻裸露鋼筋
6.6 工作效率
多波束測深系統掃測洞口河床及巖塞開口,用時1 d,完成測點約78萬。單波束測量洞口河床及巖塞開口,用時1 d,完成測點約0.2萬。對比可見多波束測深系統采集數據高效。
ROV洞內水下檢查,ROV定向設備失靈,依靠纜繩和監控影像判斷粗略定位。洞內水下能見度約為2 m范圍,ROV稍遠離洞壁,四周一片水景,ROV下一步去向較難把握,需遙控反復探摸。沿縱斷面錄制視頻,雖然借助纜線輔助定位錄制順利,但沿橫斷面錄制視頻,易發生跑偏和掛機。本計劃ROV洞內檢查1 d,實際3 d才勉強完成。雖受洞內定位困難影響,但ROV水下檢查與潛水員檢查相比效率較高。
7 結 論
本文針對深水層進水洞水下檢查存在的困難,通過分析水下檢測技術原理,比較常用水下檢測方法的優劣,提出了多波束測深系統掃描聯合ROV水下檢查的思路,設計了水下聯合檢測技術方案,形成結論如下:
(1) 多波束測深系統掃描聯合ROV水下檢查巖爆后進水洞的方法確實可行,能克服水下檢測遇到的困難,取得成果的精度和質量可靠。
(2) 多波束測深系統優點是采集數據高效,能實時3D成像,適宜于水下大面積掃測;受衛星定位信號遮擋影響,多波束掃測進水洞,僅能局限于洞口。
(3) ROV水下檢測優勢是搭載多功能傳感器替代潛水員目視檢查,安全風險小;缺點是視野小、抗流弱、纜線易發生纏繞,洞內準確定位困難。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04