基于北斗衛星導航的大機關鍵零部件數據采集及通信系統的研制
2022-08-10 02:22:50張世紅高春雷何國華周佳亮徐濟松
科技視界 2022年16期
張世紅 高春雷 何國華 周佳亮 徐濟松
(中國鐵道科學研究院集團有限公司鐵道建筑研究所,北京 100081)
0 引言
根據國家鐵路局發布的《2020 年鐵道統計公報》中指出,截至2020 年12 月底,全國鐵路營業里程達到14.63 萬公里,其中高鐵3.8 萬公里,穩居世界第一。目前,我國250km/h 及以下時速主要使用有砟軌道結構,具有鋪設簡便、造價低廉、易于維修等優點,對有砟鐵路線路的養護維修,主要通過大型養路機械進行作業,有效減輕了傳統養護工作的負擔,基本能滿足日常的線路維護需求,使軌道線路滿足線路設計標準和線路維修規則的要求,保障線路的運營安全。
隨著我國鐵路運輸規模的提高、列車運行速度的提高、運營密度的增大,使得線路養護維修作業量不斷增加, 而允許的養護施工作業時間卻越來越緊湊。因此,一方面,需要投入更多數量的大型養路機械按時完成規定的作業量;另一方面,對大機作業效率和可靠性的要求越來越高。 隨著大型養路機械的大規模使用,作業區間范圍不斷擴大,鐵路工務段對鐵路大型養路機械的監控管理的難度日益增大,尤其是在高原、山區、戈壁灘等人煙稀少的地區,很難通過2G/3G/4G 等基于地面基站的公共網絡傳輸數據,同時,大型養路機械各系統時間不一致和定位精度不高也影響著行車組織、系統安全和故障等數據的分析。 2020 年6 月23 日北斗衛星導航系統已正式完成全球組網,并提供定位、授時及短報文通信等基礎服務。 研究北斗衛星定位、授時和短報文通信技術應用于鐵路大型養路機械,對實現遠程管理,輔助大型養路機械精細化、智能化管理具有十分重要的意義。
1 總體設計方案
總體技術設計方案主要分為感知層、網絡層和應用層三部分,如圖1 所示。 感知層主要包括數據感知傳感器、位置定位設備、MCU 單元、北斗發送模塊、公網發送模塊等; 網絡層主要是指北斗RDSS 短報文通信網絡和4G 無線網絡; 應用層主要是指大型養路機械作業數據管理平臺。
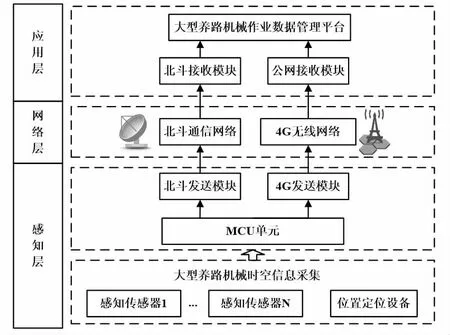
圖1 總體設計方案
2 關鍵技術
2.1 感知層—時空信息采集
2.1.1 時空信息分析
目前廣泛使用的大型養路機械設備類別主要包括清篩機、配砟整形車、搗固車、穩定車、打磨車等設備,且每臺作業機械擁有唯一的設備編號。 為了提高線路養護維修作業效率,在天窗點作業期間,多種類型大機械設備會同時在鐵路線路開展施工作業,對于管理部門而言,需要動態掌握大機作業設備的實時數量、作業位置、作業正常/故障狀態、核心零部件運行參數等重要設備信息。
以QS-650 全斷面道砟清篩機為例, 目前全路共有120 多臺,已經成為道砟清篩主力機型。 工作原理是通過柴油機驅動、全液壓傳動的方式,利用挖掘鏈的扒齒切割道床上的道砟,并進行道砟振動篩分。 為了對清篩機的作業狀態進行分析, 依據GB 25330—2019《道砟清篩機》國標要求,選擇其關鍵零部件性能參數進行實時監測。 具體監測參數如表1 所示。
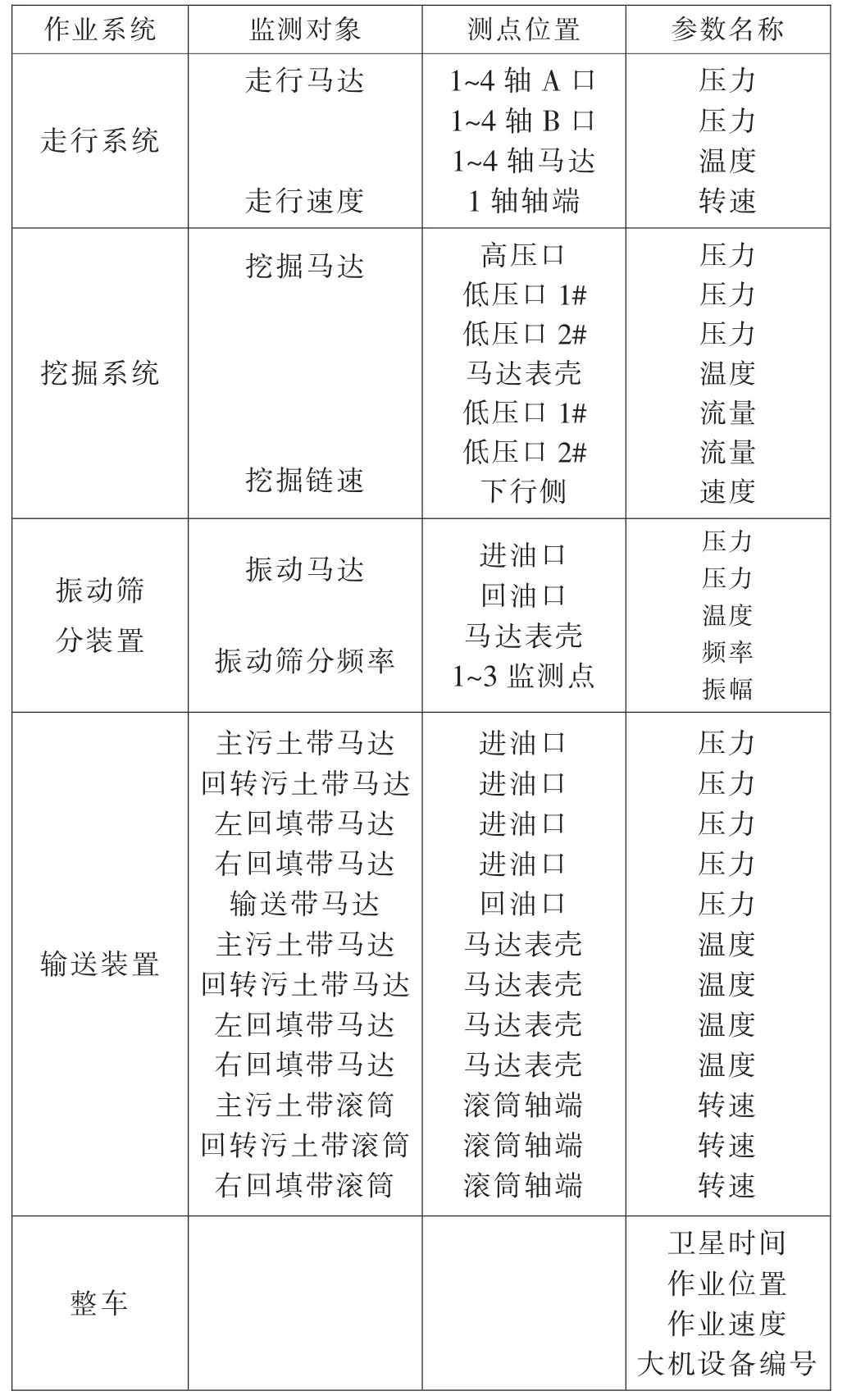
表1 QS-650 全斷面道砟清篩機監測參數
2.1.2 時空信息采集
BDS 具有兩種工作模式,衛星無線電導航業務(Radio Navigation Satellite System,RNSS)模式雖只能進行定位,但可實現每秒定位,衛星無線電測定業務(Radio Determination Satellite Service,RDSS) 模式可同時進行定位和雙向短報文通信,詳見圖2。
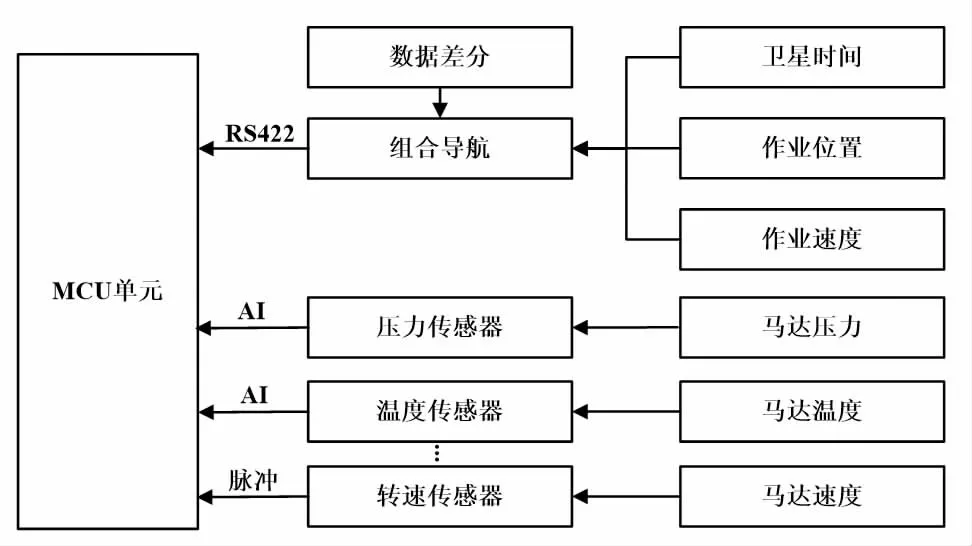
圖2 時空信息采集方案
慣性導航系統(Inertial Navigation System,INS),是一種以陀螺儀和加速度計為敏感設備求解導航參數的系統,解算得到運載體的位置、速度等信息,優點是不依賴外部信息,不向外界傳遞信息,工作時不會被信號或無線電干擾,短時間內精度較高,解算時間快,缺點是誤差隨時間而累積。
組合導航關鍵技術是將不同系統的導航數據以最優的濾波算法進行有機融合,衛星導航的高精度可以彌補慣性導航誤差迅速發散的問題,慣性導航的自主性也可以填補衛星導航易受干擾、穩定性差等的不足。 尤其在衛星信號被遮擋導致接收機無法定位的情況下,如隧道、峽谷等特殊區域,慣性導航能夠繼續輸出定位結果,直至信號恢復。 在無法接收衛星信號和低信噪比等環境下,組合導航可以提供比單獨任何一種系統更精確的導航結果, 再融合數據差分技術,獲得更高精度的定位。
2.2 感知層—時空信息處理
運用嵌入式技術和現代濾波技術,對時空信息進行采集和處理, 因北斗短報文通訊傳輸頻率為1 次/min,單次只能傳輸78 個字節, 因此為了傳輸所有采集時空信息,需采用分包處理。根據谷軍霞進行的北斗短報文丟包試驗結果顯示,當分包數量為2 個時,實際測試數據傳輸成功率為88.8%,且分包數量越多,傳輸成功率越低。 為了提高數據傳輸成功率,減少分包數量,采用數據壓縮的方法。 數據壓縮技術的原理本質上是利用數據的冗余性。將數據的冗余壓縮到最小的同時,盡可能地減少數據的失真程度,從而達到節約存儲空間、提高傳輸效率的目的。 按照壓縮后的數據是否存在信息損失, 數據壓縮技術根據壓縮后的數據是否存在信息損失, 分為有損壓縮和無損壓縮兩種。
大型養路機械時空信息包含時間特性, 屬于工業過程數據的范疇, 需要結合自身數據特點選擇壓縮算法。 目前常用無損壓縮算法分為基于統計的壓縮算法(Huffman 編碼、動態哈夫曼編碼)和基于字典的壓縮算法(LZ77 算法、LZ78 算法、LZSS 算法、LZW 算法)。
2.2.1 Bool 類型狀態量無損壓縮
Bool 類型狀態量的無損壓縮是通過將多個狀態量移位到一個字節中,可以達到1:8 的高壓縮比。 如圖3 所示。

圖3 Bool 類型狀態量無損壓縮過程
2.2.2 Int 類型數據無損壓縮
Int 類型數據無損壓縮過程如圖4 所示。
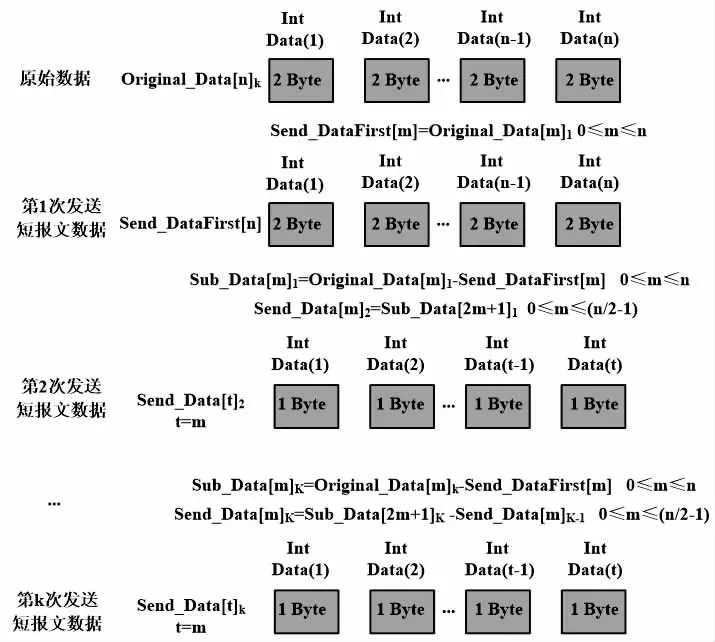
圖4 Int 類型數據無損壓縮過程
無損壓縮和解壓縮過程互逆,實現Bool 類型狀態量數據和Int 類型數據的無損傳輸,傳輸數據不失真。
2.3 網絡層—數據傳輸技術
采用北斗RDSS 短報文通信+4G 無線公網雙通道進行數據傳輸,RSDD 數傳終端內部集成短報文通信模塊、4G 透傳模塊和BDS/GPS 雙模定位模塊。 在4G網絡信號較弱時,可以通過短報文進行數據傳輸。數據傳輸技術方案如圖5 所示。
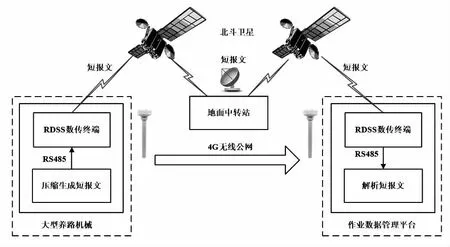
圖5 數據傳輸技術方案
北斗RDSS 短報文通信中, 每個數傳終端中都內置一張北斗通信卡,擁有唯一的ID 編號。 數傳終端性能指標如表2 所示。
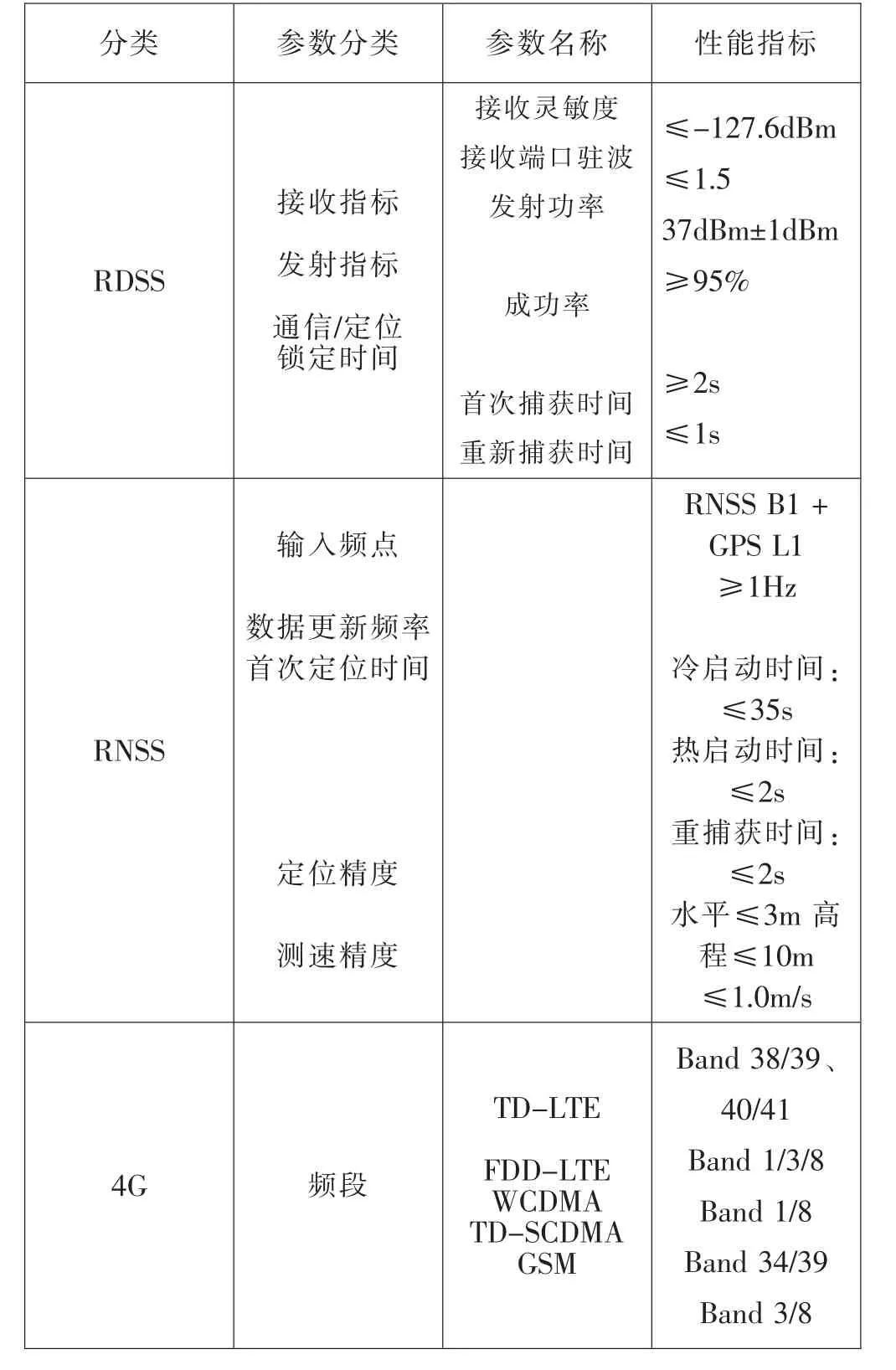
表2 RDSS 數傳終端性能指標
2.4 應用層—作業數據管理平臺
大型養路機械作業數據管理平臺結構如圖6 所示。
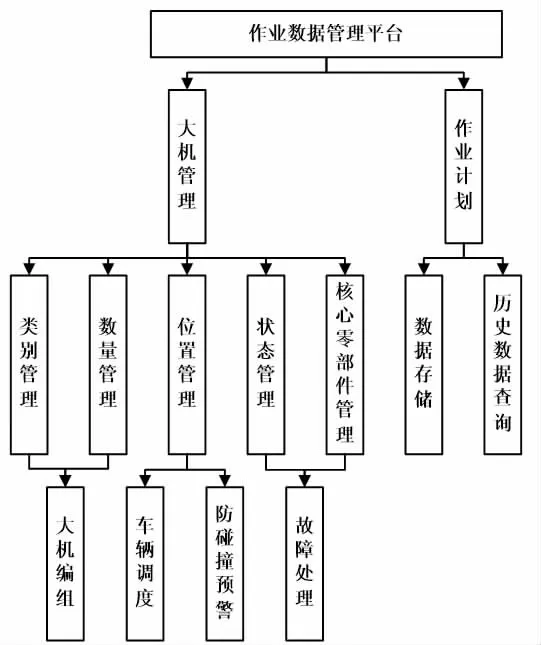
圖6 作業數據管理平臺結構
通過作業數據管理平臺, 可以實時查看大機作業位置、核心零部件關鍵性能參數、作業計劃等重要數據。
3 結語
本系統基于QS-650 全斷面道砟清篩機, 完成了對影響清篩效果的核心機構零部件的性能分析、數據采集、數據傳輸、數據解析、數據顯示等內容的研究,利用北斗/GPS 雙模定位技術融合慣性導航技術,在數據差分模式下,實現大機作業位置的準確定位。 采用北斗RDSS 短報文通信和4G 無線網絡雙通道方式完成公網信號未覆蓋區域或信號較弱區域的大機作業定位和關鍵數據的傳輸。 通過大型養路機械作業數據管理中心平臺實現大機的狀態監測、數據存儲、歷史數據查詢等功能,為將來進一步運用大數據、云計算、5G 等先進技術平臺,實現智能大機編組、車輛調度、防碰撞預警、故障處理、核心零部件壽命預測等提供強有力的數據保障。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
電腦報(2020年35期)2020-09-17 13:25:53
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
故事大王(2016年7期)2016-09-22 17:30:08
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
